Спосіб регулювання швидкості по відхиленню і регулятор швидкості для його здійснення
Формула / Реферат
1. Спосіб регулювання швидкості по відхиленню, де відхилення є різницею сигналів завдання на швидкість і зворотного зв’язку по швидкості, який відрізняється тим, що величину відхилення додатково зменшують на величину, рівну прогнозованій зміні швидкості при динаміці електропривода, яку спостерігають.
2. Спосіб за п. 1, який відрізняється тим, що прогнозована зміна швидкості визначається за формулою:
 ,
,
де ![]() - коефіцієнт інтегратора електромеханічної частини електропривода;
- коефіцієнт інтегратора електромеханічної частини електропривода;
І - миттєве значення величини струму двигуна;
Іс - величина струму статичного навантаження;
![]() - задана величина похідної струму двигуна.
- задана величина похідної струму двигуна.
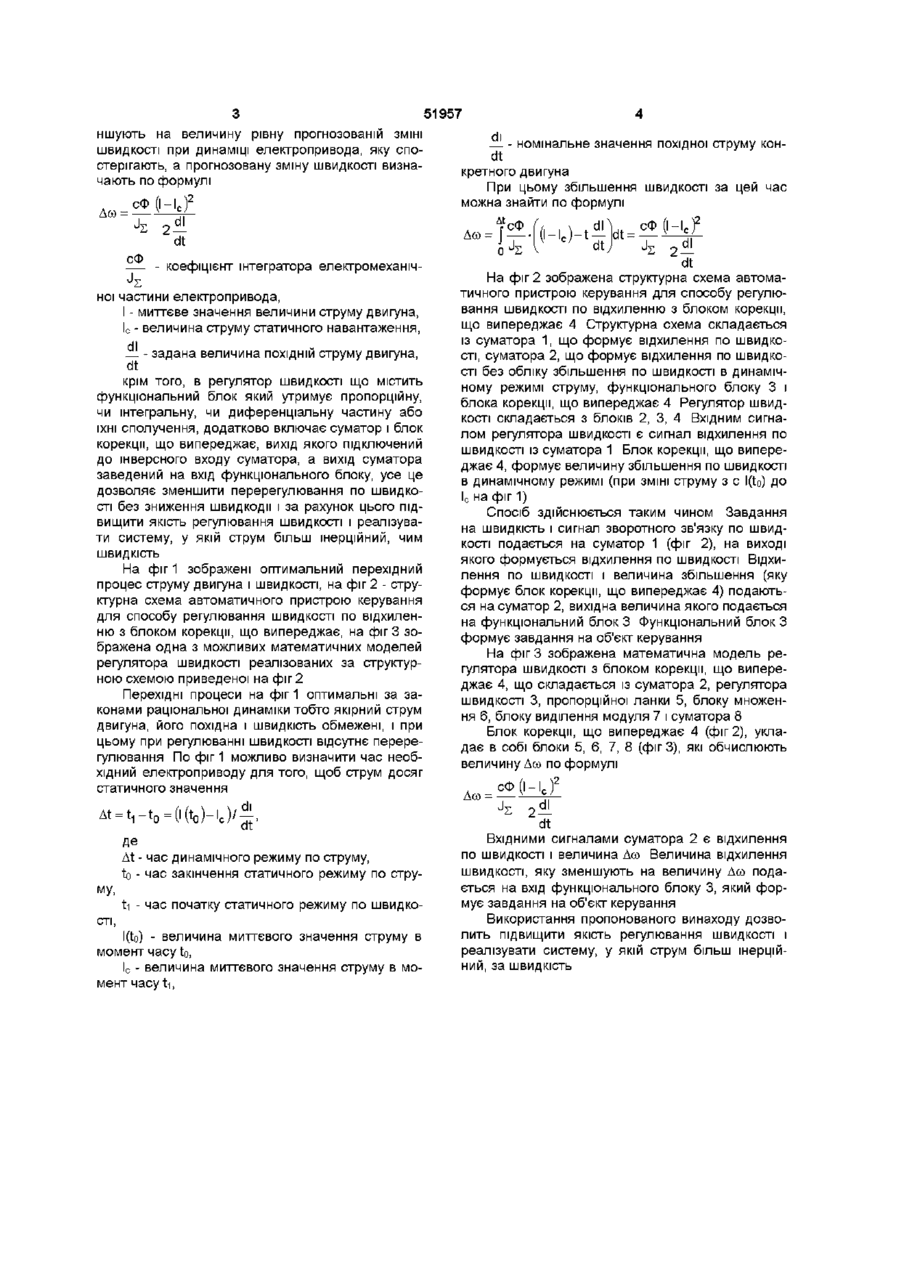
3. Регулятор швидкості, що містить функціональний блок, який має пропорційну чи інтегральну, чи диференціальну частину або їхні сполучення, який відрізняється тим, що додатково включає суматор і випереджувальний блок корекції, вихід якого підключений до інверсного входу суматора, а вихід суматора заведений на вхід функціонального блока.
Текст
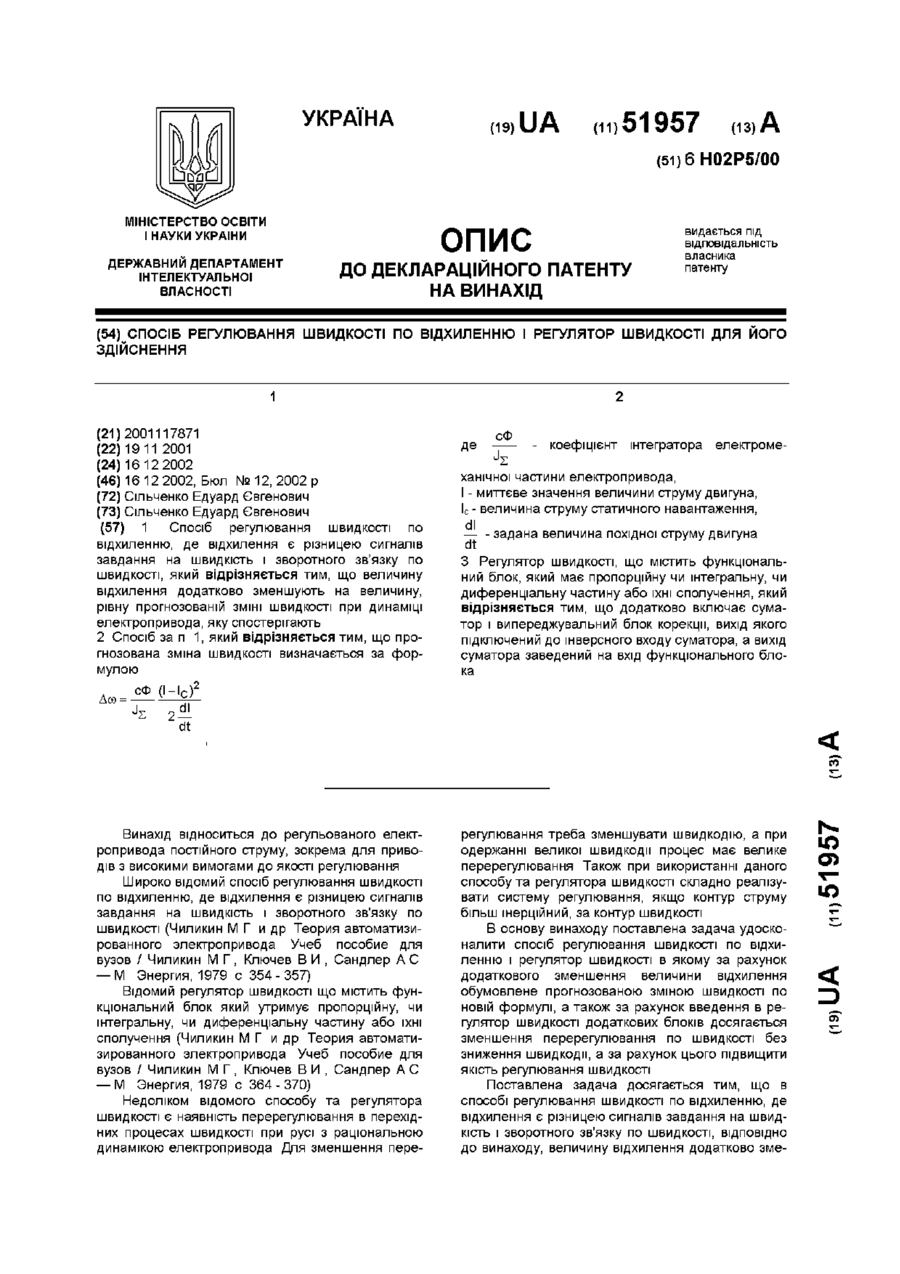
1 Спосіб регулювання швидкості по відхиленню, де відхилення є різницею сигналів завдання на швидкість і зворотного зв'язку по швидкості, який відрізняється тим, що величину відхилення додатково зменшують на величину, рівну прогнозованій ЗМІНІ ШВИДКОСТІ при динаміці електропривода, яку спостерігають 2 Спосіб за п 1, який відрізняється тим, що прозміна швидкості визначається за форгнозована мулою сФ ( Дсо = di dt ханічної частини електропривода, І - миттєве значення величини струму двигуна, Іс - величина струму статичного навантаження, dl — - задана величина похідної струму двигуна dt З Регулятор швидкості, що містить функціональний блок, який має пропорційну чи інтегральну, чи диференціальну частину або їхні сполучення, який відрізняється тим, що додатково включає суматор і випереджувальний блок корекції, вихід якого підключений до інверсного входу суматора, а вихід суматора заведений на вхід функціонального блока Винахід відноситься до регульованого електропривода постійного струму, зокрема для приводів з високими вимогами до якості регулювання Широко відомий спосіб регулювання швидкості по відхиленню, де відхилення є різницею сигналів завдання на швидкість і зворотного зв'язку по швидкості (Чиликин М Г и др Теория автоматизированного электропривода Учеб пособие для вузов / Чиликин М Г, Кпючев В И , Сандлер А С — М Энергия, 1979 с 354 - 357) Відомий регулятор швидкості що містить функціональний блок який утримує пропорційну, чи інтегральну, чи диференціальну частину або їхні сполучення (Чиликин М Г и др Теория автоматизированного электропривода Учеб пособие для вузов / Чиликин М Г, Кпючев В И , Сандлер А С — М Энергия, 1979 с 364 - 370) Недоліком відомого способу та регулятора швидкості є наявність перерегулювання в перехідних процесах швидкості при русі з раціональною динамікою електропривода Для зменшення пере регулювання треба зменшувати швидкодію, а при одержанні великої швидкодії процес має велике перерегулювання Також при використанні даного способу та регулятора швидкості складно реалізувати систему регулювання, якщо контур струму більш інерційний, за контур швидкості В основу винаходу поставлена задача удосконалити спосіб регулювання швидкості по відхиленню і регулятор швидкості в якому за рахунок додаткового зменшення величини відхилення обумовлене прогнозованою зміною швидкості по новій формулі, а також за рахунок введення в регулятор швидкості додаткових блоків досягається зменшення перерегулювання по швидкості без зниження швидкодії, а за рахунок цього підвищити якість регулювання швидкості Поставлена задача досягається тим, що в способі регулювання швидкості по відхиленню, де відхилення є різницею сигналів завдання на швидкість і зворотного зв'язку по швидкості, ВІДПОВІДНО до винаходу, величину відхилення додатково зме Д е сФ J7~ коефіцієнт інтегратора електроме 1 ю ю 51957 ншують на величину рівну прогнозованій ЗМІНІ ШВИДКОСТІ при динаміці електропривода, яку спостерігають, а прогнозовану зміну швидкості визначають по формулі \2 сФ 1-І Дсо = dl J, dt сФ - коефіцієнт інтегратора електромеханічHOI частини електропривода, I - миттєве значення величини струму двигуна, Іс - величина струму статичного навантаження, — - задана величина ПОХІДНІЙ струму двигуна, dt крім того, в регулятор швидкості що містить функціональний блок який утримує пропорційну, чи інтегральну, чи диференціальну частину або їхні сполучення, додатково включає суматор і блок корекції, що випереджає, вихід якого підключений до інверсного входу суматора, а вихід суматора заведений на вхід функціонального блоку, усе це дозволяє зменшити перерегулювання по швидкості без зниження швидкодії і за рахунок цього підвищити якість регулювання швидкості і реалізувати систему, у якій струм більш інерційний, чим ШВИДКІСТЬ На фіг 1 зображені оптимальний перехідний процес струму двигуна і швидкості, на фіг 2 - структурна схема автоматичного пристрою керування для способу регулювання швидкості по відхиленню з блоком корекції, що випереджає, на фіг 3 зображена одна з можливих математичних моделей регулятора швидкості реалізованих за структурною схемою приведеної на фіг 2 Перехідні процеси на фіг 1 оптимальні за законами раціональної динаміки тобто якірний струм двигуна, його похідна і швидкість обмежені, і при цьому при регулюванні швидкості відсутнє перерегулювання По фіг 1 можливо визначити час необхідний електроприводу для того, щоб струм досяг статичного значення At = t , - t o = ( l ( t b ) - l e ) / ^ Де At - час динамічного режиму по струму, to - час закінчення статичного режиму по струму, - час початку статичного режиму по швидко сті, І (to) - величина миттєвого значення струму в момент часу to, Іс - величина миттєвого значення струму в момент часу ti, — - номінальне значення похідної струму конdt кретного двигуна При цьому збільшення швидкості за цей час можна знайти по формулі At.сФ l - l сc /) - t - | d t = dt ' dl J, dt На фіг 2 зображена структурна схема автоматичного пристрою керування для способу регулювання швидкості по відхиленню з блоком корекції, що випереджає 4 Структурна схема складається із суматора 1, що формує відхилення по швидкості, суматора 2, що формує відхилення по швидкості без обліку збільшення по швидкості в динамічному режимі струму, функціонального блоку 3 і блока корекції, що випереджає 4 Регулятор швидкості складається з блоків 2, 3, 4 Вхідним сигналом регулятора швидкості є сигнал відхилення по швидкості із суматора 1 Блок корекції, що випереджає 4, формує величину збільшення по швидкості в динамічному режимі (при ЗМІНІ струму з с І (to) до Іс на фіг 1) Спосіб здійснюється таким чином Завдання на швидкість і сигнал зворотного зв'язку по швидкості подається на суматор 1 (фіг 2), на виході якого формується відхилення по швидкості Відхилення по швидкості і величина збільшення (яку формує блок корекції, що випереджає 4) подаються на суматор 2, вихідна величина якого подається на функціональний блок 3 Функціональний блок З формує завдання на об'єкт керування На фіг 3 зображена математична модель регулятора швидкості з блоком корекції, що випереджає 4, що складається із суматора 2, регулятора швидкості 3, пропорційної ланки 5, блоку множення 6, блоку виділення модуля 7 і суматора 8 Блок корекції, що випереджає 4 (фіг 2), укладає в собі блоки 5, 6, 7, 8 (фігЗ), які обчислюють величину Дсо по формулі \2 сФ 1-І Дсо = J, dt Вхідними сигналами суматора 2 є відхилення по швидкості і величина Дсо Величина відхилення швидкості, яку зменшують на величину Дсо подається на вхід функціонального блоку 3, який формує завдання на об'єкт керування Використання пропонованого винаходу дозволить підвищити якість регулювання швидкості і реалізувати систему, у якій струм більш інерційний, за швидкість 51957 Фнг. 1 © Блок корекції, що випереджає ФІГ. 2 ©зад-© Фіг. З 51957 ДП «Український інститут промислової власності» (Укрпатент) вул Сім'ї Хохлових, 15, м Київ, 04119, Україна ( 0 4 4 ) 4 5 6 - 2 0 - 90 ТОВ "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)216-32-71
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for deviation control of motor rotation frequency
Автори англійськоюSilchenko Eduard Yevhenovych
Назва патенту російськоюСпособ регулирования частоты вращения электродвигателя по отклонению и устройство для осуществления способа
Автори російськоюСильченко Эдуард Евгеньевич
МПК / Мітки
МПК: H02P 5/00
Мітки: здійснення, спосіб, регулятор, регулювання, відхиленню, швидкості
Код посилання
<a href="https://ua.patents.su/4-51957-sposib-regulyuvannya-shvidkosti-po-vidkhilennyu-i-regulyator-shvidkosti-dlya-jjogo-zdijjsnennya.html" target="_blank" rel="follow" title="База патентів України">Спосіб регулювання швидкості по відхиленню і регулятор швидкості для його здійснення</a>
Спосіб автоматичного регулювання кутової швидкості та пристрій для його здійснення
Номер патенту: 34183
Опубліковано: 15.02.2001
Автор: Ключковський Сергій Миронович
МПК: G05D 13/00
Мітки: спосіб, пристрій, швидкості, здійснення, регулювання, кутової, автоматичного
Текст:
...і сили акумулятора, то при зміні однієї з них, а саме - відцентрової сили, рівновага порушується і ланки здійснюють рух, змінюючи при цьому динамічний момент інерції системи. Наслідком зміни останнього є виникнення на валу крутного моменту, який запобігає подальшому відхиленню швидкості. Таким чином, відбувається автоматична зміна потоку рушійної енергії в регульованій системі, джерелом якої є акумулятор механічної енергії. Пристрій для...
Пристрій для регулювання швидкості обертання однофазного конденсаторного електродвигуна
Номер патенту: 46848
Опубліковано: 17.06.2002
Автори: Соловей Іван Михайлович, Мішин Володимир Іванович
МПК: H02P 1/16, H02K 17/08
Мітки: обертання, регулювання, електродвигуна, пристрій, конденсаторного, швидкості, однофазного
Формула / Реферат:
Пристрій для регулювання швидкості обертання однофазного конденсаторного електродвигуна, який включає асинхронний однофазний конденсаторний електродвигун, силову схему на чотирьох симісторах, батарею конденсаторів і блок керування, який відрізняється тим, що симістори з‘єднані зустрічно, при цьому аноди двох симісторів з‘єднані між собою в один вивід, який подається на фазу мережі, аноди двох інших на "0", а до середніх точок...
Спосіб регулювання тиску повітря в шинах і система для його здійснення
Номер патенту: 37258
Опубліковано: 15.05.2001
Автор: Зінько Роман Володимирович
МПК: B60C 29/00, B60C 23/00
Мітки: тиску, повітря, спосіб, здійснення, система, регулювання, шинах
Формула / Реферат:
1 .Спосіб регулювання тиску повітря в шинах який включає накачування повітря в ресивер, перекачування повітря з ресивера в шини з одночасним контролем тиску повітря в шинах, який відрізняється тим, що визначають навантаження на вантажопідйомнику, а тиск в шинах кожної пари коліс знаходять за формулою : Pw = Е (І/А- KcQb/K), де А, Е - коефіцієнти, що...
Спосіб визначення швидкості розповсюдження акустичних коливань і пристрій для його здійснення
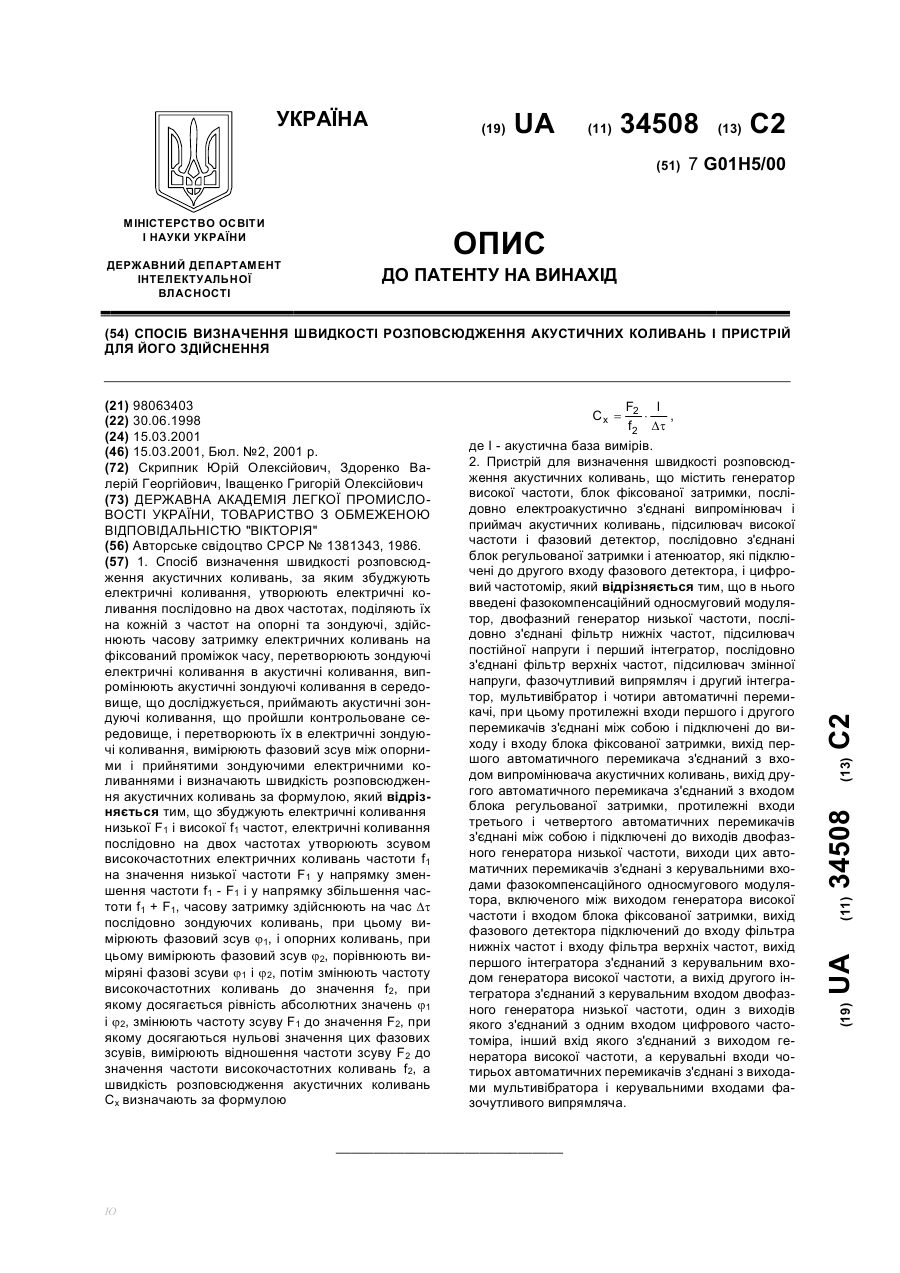
Номер патенту: 34508
Опубліковано: 15.03.2001
Автори: Здоренко Валерій Георгійович, Скрипник Юрій Олексійович, Іващенко Григорій Олексійович
МПК: G01N 29/00, G01N 29/07, G01H 5/00
Мітки: розповсюдження, пристрій, спосіб, визначення, швидкості, здійснення, коливань, акустичних
Текст:
...підключений до входу фільтру нижніх частот і входу фільтру верхніх частот, вихід першого інтегратора з'єднаний з керувальним входом генератора високої частоти, а вихід другого інтегратора з'єднаний з керувальним входом двофазного генератора низької частоти, один з виходів якого з'єднаний з одним входом цифрового частотоміра, інший вхід якого з'єднаний з виходом генератора високої частоти, а керувальні входи чотирьох автоматичних...
Спосіб вимірювання кутової швидкості та пристрій для його здійснення
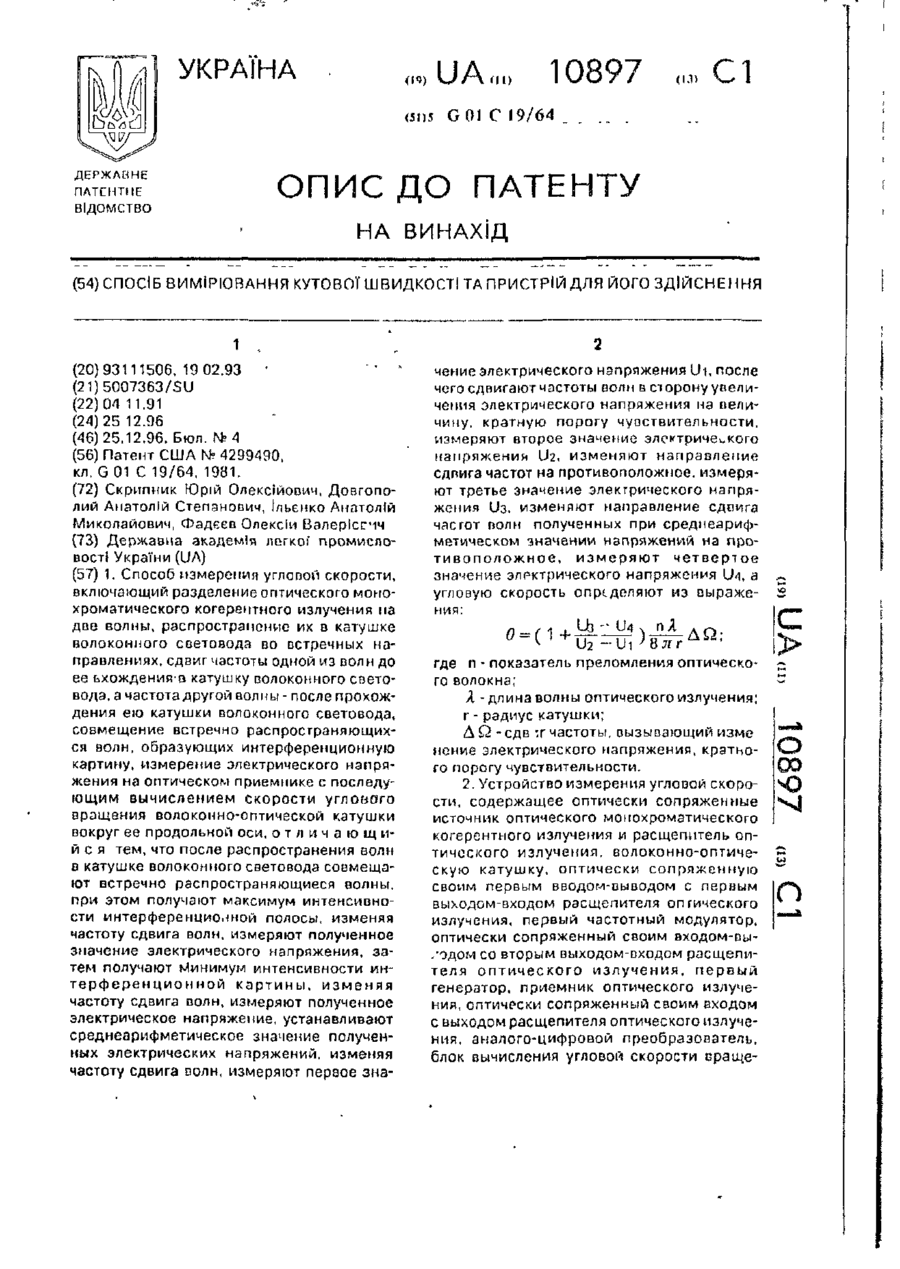
Номер патенту: 10897
Опубліковано: 25.12.1996
Автори: Скрипник Юрій Олексійович, Фадєєв Олексій Валерієвич, Довгополий Анатолій Степанович, Ільєнко Анатолій Миколайович
МПК: G01C 19/64
Мітки: пристрій, спосіб, кутової, вимірювання, швидкості, здійснення
Формула / Реферат:
(57) 1. Способ измерения угловой скорости, включающий разделение оптического монохроматического когерентного излучения на две волны, распространение их в катушке волоконного световода во встречных направлениях, сдвиг частоты одной из волн до ее вхождения в катушку волоконного световода, а частота другой волны - после прохождения ею катушки волоконного световода, совмещение встречно распространяющихся волн, образующих интерференционную...
Попередній патент: Пристрій для отримання кристалічного цукру
Наступний патент: Спосіб визначення рівня, меж поділу та температури рідких і сипких середовищ
Випадковий патент: Спосіб передачі оперативного повідомлення про виникнення пожежі транспортних засобів