Спосіб адаптивної селекції об’єктів
Номер патенту: 69177
Опубліковано: 16.08.2004
Автори: Ладанюк Анатолій Петрович, Кишенько Василь Дмитрович, Іващук Вячеслав Віталійович
Формула / Реферат
Спосіб адаптивної селекції об'єктів, що включає виділення значень інтегрованих сигналів з наступним визначенням сигналу селекції для кожного об'єкта, який відрізняється тим, що послідовності даних по входу та виходу об'єкта сегментують за даними про час запізнення в досліджуваних каналах, поданими у вигляді перетвореного в ортогональному базисі за обраною сплеск-функцією обробки та домінуючою частотою вхідного сигналу, для перетворення вихідного сигналу спектри представляють за поведінкою у часі та підлягають аналізу, опрацьовані представлення подають у компаратор для визначення конструкції та параметрів моделі, а визначений час запізнення в каналі передають на сегментацію.
Текст
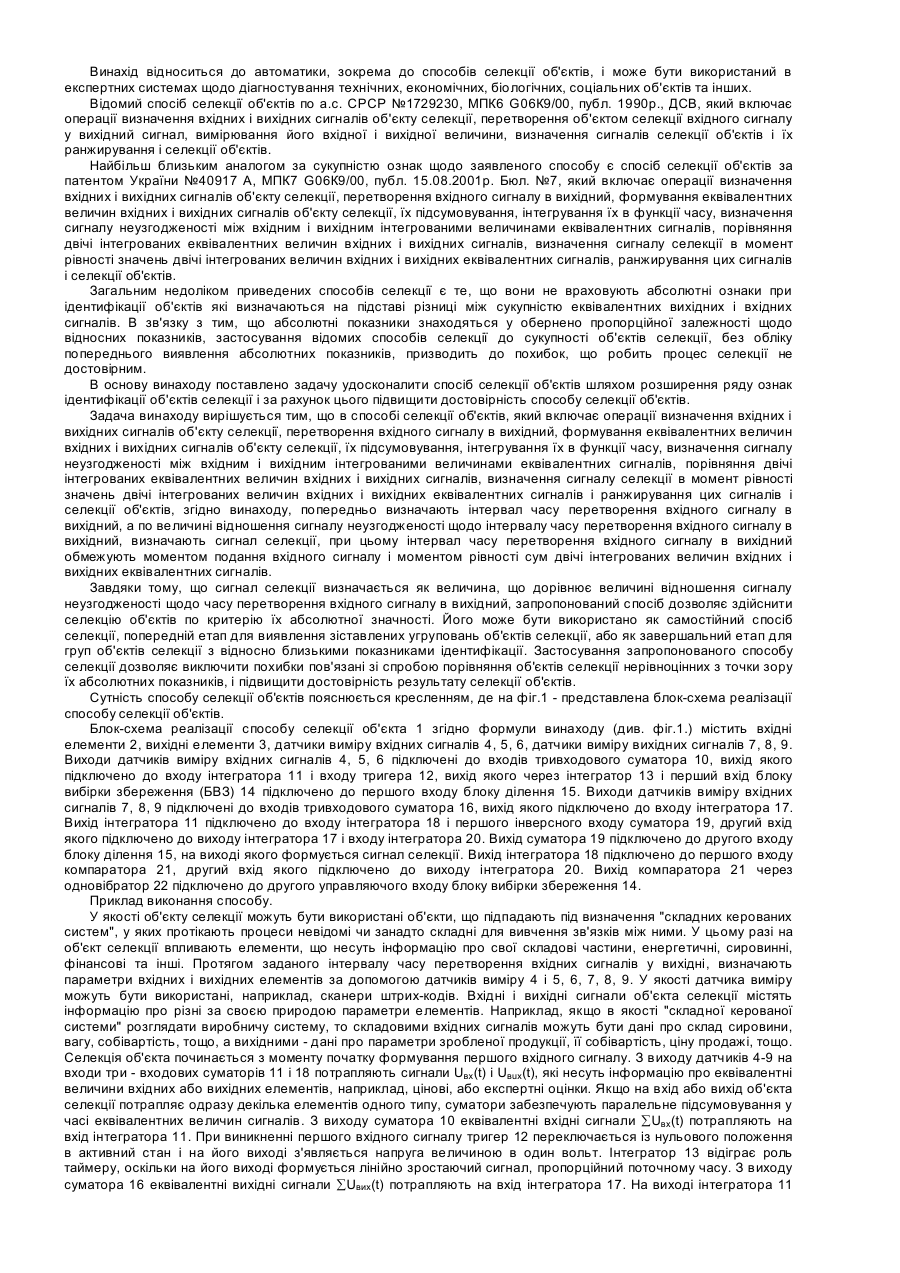
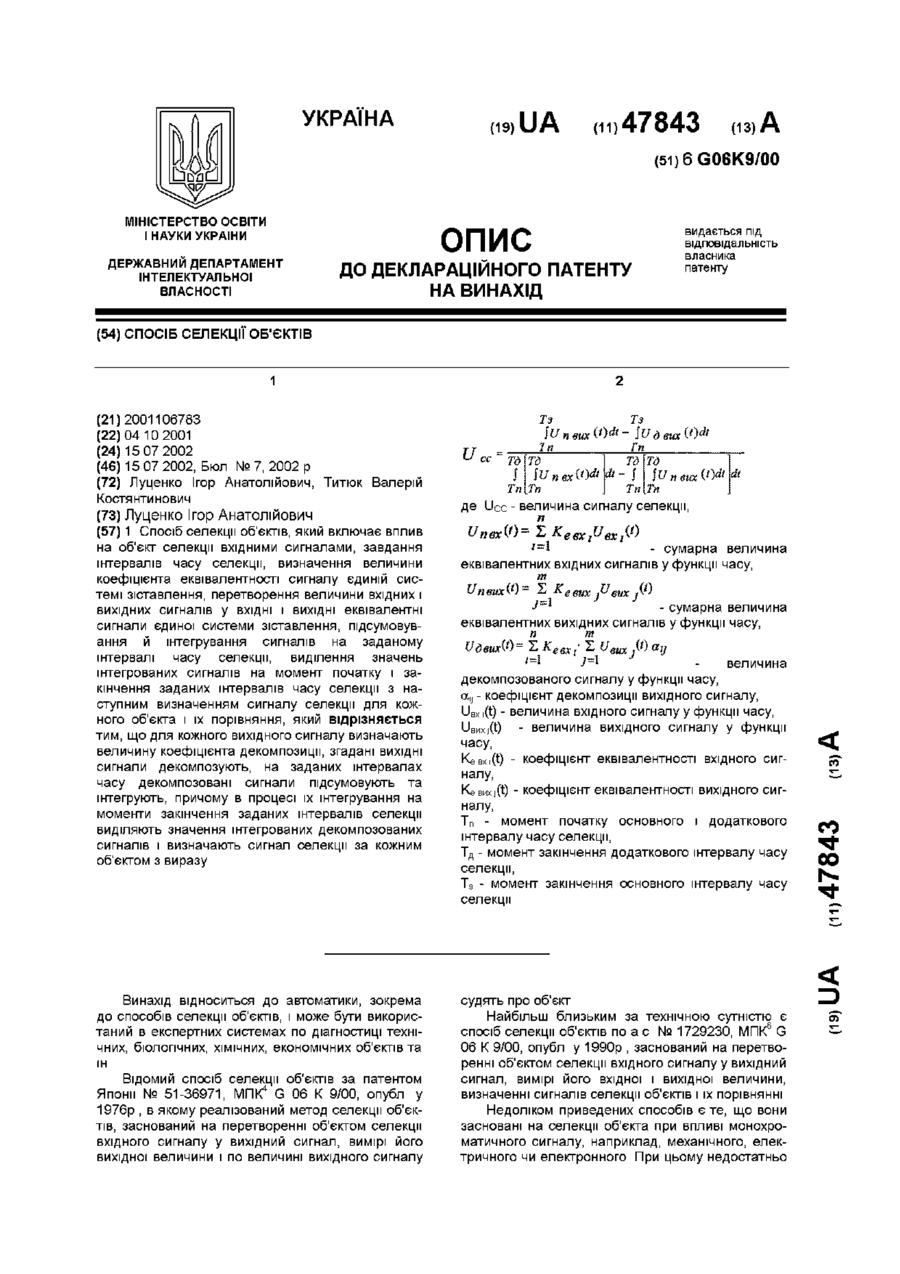
Винахід відноситься до автоматики, зокрема до способів селекції об'єктів управління, і може бути використаний в адаптивних системах та системах ідентифікації технологічних, хімічних, електричних та інших об'єктів. Відомий "Способ спектрального анализа случайных сигналов и устройство его осуществления" за а.с. №1803880, МПК5 G01R 23/16, бюл. №11, 1993р., де для аналізу спектра використовується швидке перетворення Фур'є. Приведений винахід не дозволяє встановлювати точне частотно-часове положення змін в сигналі, як наслідок, - фронт зміни досліджуваного зразка виявляється "розмазаним" у спектрі. Найбільш близьким за технічним спрямуванням і прийнятий за прототип є "спосіб селекції об'єктів" за патентом UA 47843 А, бюл. №7, 2002р., МПК6 G06K 9/00, який включає вплив на об'єкт селекції вхідними сигналами, виділення значень інтегрованих сигналів на момент початку й закінчення заданих інтервалів часу селекції з наступним визначенням сигналу селекції для кожного об'єкта і їх порівняння. Недоліками приведених способів є: селекція об'єкта відбувається при активному впливі на об'єкт додаткових управляючих сигналів, що можуть спричиняти негативний вплив на систему; недостатній інформаційний базис для стійкої роботи системи розпізнавання при застосуванні до нелінійних залежностей із швидкою динамікою міжпараметричних зв'язків. В основу винаходу було покладено задачу розширення спектра використання та покращенню вибіркової здатності способу селекції об'єктів. Поставлена задача вирішується тим, що виділяються значення інтегрованих сигналів з наступним визначенням сигналу селекції для кожного об'єкту. Згідно з винаходом послідовності даних по входу та виходу об'єкта сегментуються за даними про час запізнення в досліджуваних каналах, подані у вигляді перетвореного, в ортогональному базисі, за обраною сплеск-функцією обробки та домінуючою частотою вхідного сигналу, для перетворення вихідного сигналу, спектри представляються за поведінкою у часі та підлягають аналізу, опрацьовані представлення подаються у компаратор для визначення конструкції та параметрів моделі, а визначений час запізнення в каналі передається на сегментацію. Причинно-наслідковий зв'язок між ознаками, що пропонується і результатом, що очікується наступний. Використовується пасивне спостереження за вхід-вихідними сигналами об'єкта з подальшим їх поділом за часом Tc на інформаційні блоки, причому Tc > Tmax ( Tc -час спостереження, Tmax - максимально можливе значення запізнення об'єкту, що встановлюється, попередньо, дослідником та коригується під час роботи системи розпізнавання T3 ). Такий підхід запобігає негативному впливу на об'єкт, що спричинюється контрольними сигналами активної ідентифікації і не може бути використаний при проведені оперативної ідентифікації під час функціонування технологічних об'єктів. За зазначених умов функціонування системи досить важливо вчасно визначити функцію відгуку на виході об'єкта. Отже робота блоку селекції починається із перевищенням встановленого, відповідно до точності використаного обладнання, значення максимальної дисперсії ID навколо значення середньої математичної сигналу спостереження. Використовуємо той факт, що при роботі замкненої системи регулювання (спробі вийти на задане значення) на вхід, за керуванням, поступає сигнал подібний "білому шуму" (велика амплітуда зменшується, а частота зміни знаку керуючого діяння зростає ). Задіюючи алгоритм лише на час, потрібний для проведення оперативної ідентифікації, - отримуємо економію апаратних ресурсів системи. Вхідні Ui та вихідні X i , сигнали підлягають розкладу у ортогональному базисі локально орієнтованих сплескфункцій W, що попередньо містяться в базі функцій перетворення (БДП) та обираються за здатністю опису сигналів будь-якої форми. Згадана властивість функцій оцінюється за критерієм негентропії IH розподілу послідовності вхідних сигналів Ui , у базисі обраної функції. Такий метод буде в даному випадку оптимальним для використання на ділянці вибору базисної функції, з точки зору швидкості підрахунків. За максимумом IH визначається і домінуюча частота f¶ відносно якої буде проводитись пошук відображення сигналу Ui ,у спектрі сигналу X i . Дані про обрану функцію перетворення W обр та f¶ передається у блок обробки (БОС) вихідного сигналу X i . Блок БОС вихідних сигналів, використовуючи функцію W обр, починає аналізувати перетворенні спектральні лінії, орієнтуючись: від послідовності на частоті f¶ ; поведінки енергетичного рівня сигнальних відліків на всіх лініях спектру. У порівнянні перемагає спектральна лінія з частотою f ³ f ¶ та максимальною кількістю енергетичних перетворень на лінії спектру у послідовності вихідних сигналів X i , корельованих із перетвореннями у спектрі послідовностей вхідних сигналів Ui . Перехід f¶ ® fгх ( fгх : - головна частота вихідного спектра, де була визначена присутність основної енергії сигналу Ui ) змінює частотні характеристики моделі представленого об'єкта. Відношення миттєвих енергетичних рівнів сигналу f¶ (для Ui ) та fгх (для X i ) дає оцінку коефіцієнту підсилення досліджуваного каналу у визначений момент часу. Ортогональний базис відомої функції створить неявний інформаційний простір, що забезпечить алгоритму розпізнавання додаткової стійкості та зменшить кількість помилок на етапі розпізнавання. Оцінка поведінки спектральних змін X i по відношенню до Ui дає представлення про конструкцію моделі об'єкта (КМО) та в подальшому визначає підстави для відокремлення еталон моделі. Спосіб здійснюється таким чином: Приклад використання №1 Досліджуємо процес, що неперервний у часі, математичний опис якого неможливий, використанням лінійних залежностей, параметри процесу - нестаціонарні. За наявністю початкових даних об'єкт відповідає визначенню "чорний ящик". Нормальний хід процесу, коли система регулювання "справляється" із завданням підтримання встановленої точності регулювання, - система селекції не працює. З часом (а об'єкт є нестаціонарним) спрацьовує умова: за великою дисперсією вихідної змінної, - вмикається система селекції. Сегментатор, отримуючи дані з датчиків, відрізає вибірки вхідних та вихідних сигналів у вигляді часових послідовностей. Блок БОС представляє ці послідовності у вигляді спектрів, вибравши при цьому за базисну функцію - сплеск-функцію W обр із БФП. Далі спектральні вибірки потрапляють у БАС (блок аналізу спектрів), де послідовності n ліній спектрів сегментуються AL i за ізоведінкою у дискретних координатах часу k , з подальшим кодуванням. Отримані образи порівнюються у компараторі. За даними компаратора коригується конструкція моделі, визначаються передаточні коефіцієнти та час транспортного запізнення в досліджуваному каналі. Приклад використання №2 Досліджуємо процес, що має швидкий рух міжпараметричних залежностей (хімікотехнологічний процес). Система не має можливості контролювати всі характеристики середовища, що відповідають за нормальний хід процесу. В даному випадку пропонується чітко слідкувати за співвідношенням технологічних змінних та їх впливом на результат, до того ж як на сукупний, так і окремий, що залежить від дії кожної вхідної величини у визначений момент процесу. Сегментатор, отримуючи дані з датчиків, відрізає вибірки вхідних та вихідних сигналів у вигляді часових послідовностей. Блок БОС представляє ці послідовності у вигляді спектрів, вибравши при цьому за базисну функцію - сплеск-функцію W обр з БФП. Далі спектральні вибірки потрапляють у БАС (блок аналізу спектрів), де послідовності n ліній спектрів сегментуються AL i за поведінкою у дискретних координатах часу k , з подальшим кодуванням. Отримані образи порівнюються у компараторі. За даними компаратора коригується конструкція моделі, визначаються відповідні міжпараметричні залежності. Висновок: спосіб має розширений спектр використання завдяки збільшенню інформаційного базису, покращенням вибіркової здатності, що у свою чергу гарантує підвищення точності роботи автоматизованих систем.
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of adaptive selection of objects
Автори англійськоюIvaschuk Viacheslav Vitaliiovych, Ladaniuk Anatolii Petrovych
Назва патенту російськоюСпособ адаптивного выбора объектов
Автори російськоюИващук Вячеслав Витальевич, Ладанюк Анатолий Петрович
МПК / Мітки
МПК: G01R 23/16
Мітки: адаптивної, об'єктів, спосіб, селекції
Код посилання
<a href="https://ua.patents.su/2-69177-sposib-adaptivno-selekci-obehktiv.html" target="_blank" rel="follow" title="База патентів України">Спосіб адаптивної селекції об’єктів</a>
Спосіб селекції об’єктів
Номер патенту: 66251
Опубліковано: 15.04.2004
Автор: Луценко Ігор Анатолійович
Мітки: об'єктів, селекції, спосіб
Формула / Реферат:
Спосіб селекції об'єктів, що включає операції визначення часу селекції об'єктів селекції, визначення вхідних і вихідних сигналів об'єктів селекції, формування еквівалентних величин вхідних і вихідних сигналів об'єктів селекції, інтегрування їх в функції часу, підсумовування, визначення для кожного об’єкта селекції сигналу неузгодженості між вхідним і вихідним інтегрованими величинами еквівалентних сигналів, порівняння двічі інтегрованих...
Спосіб селекції об’єктів
Номер патенту: 40917
Опубліковано: 15.06.2004
Автори: Луценко Ігор Анатолійович, Титюк Валерій Костянтинович
Мітки: спосіб, об'єктів, селекції
Формула / Реферат:
Спосіб селекції об'єктів, який базується на перетворенні об'єктом селекції вхідного сигналу у вихідний сигнал, вимірі його вхідної і вихідної величини, визначенні сигналів селекції об'єктів і їх порівнянні, який відрізняється тим, що на об'єкт селекції подають додаткові сигнали, визначають основний і додатковий інтервал часу селекції, визначають величини коефіцієнтів еквівалентності вхідних і вихідних сигналів, величини вхідних і вихідних...
Спосіб селекції об’єктів
Номер патенту: 63146
Опубліковано: 15.01.2004
Автор: Луценко Ігор Анатолійович
Мітки: селекції, об'єктів, спосіб
Формула / Реферат:
Спосіб селекції об'єктів, що включає операції визначення вхідних і вихідних сигналів об'єкта селекції, перетворення вхідного сигналу в вихідний, формування еквівалентних величин вхідних і вихідних сигналів об'єкта селекції, їх підсумовування, інтегрування їх в функції часу, визначення сигналу неузгодженості між вхідним і вихідним інтегрованими величинами еквівалентних сигналів, порівняння двічі інтегрованих еквівалентних величин вхідних і...
Спосіб селекції об’єктів
Номер патенту: 47843
Опубліковано: 15.04.2004
Автори: Луценко Ігор Анатолійович, Титюк Валерій Костянтинович
Мітки: селекції, спосіб, об'єктів
Формула / Реферат:
Спосіб селекції об'єктів, який включає вплив на об'єкт селекції вхідними сигналами, задання інтервалів часу селекції, визначення величини коефіцієнта еквівалентності сигналу єдиній системі зіставлення, перетворення величини вхідних і вихідних сигналів у вхідні і вихідні еквівалентні сигнали єдиної системи зіставлення, підсумовування й інтегрування сигналів на заданому інтервалі часу селекції, виділення значень інтегрованих сигналів на момент...
Спосіб адаптивної цифрової фільтрації сигналів і пристрій для його здійснення
Номер патенту: 55522
Опубліковано: 15.04.2003
Автори: БОЙЧЕНКО ЮРІЙ ПЕТРОВИЧ, БАРАННИК ЄВГЕН ОЛЕКСАНДРОВИЧ, МАРУСЕНКО АНАТОЛІЙ ІЛАРІОНОВИЧ, ТОВСТЯК ВОЛОДИМИР ВАСИЛЬОВИЧ
МПК: G06F 17/10, A61B 8/00, G06F 15/18, G01S 15/00
Мітки: здійснення, фільтрації, адаптивної, сигналів, спосіб, пристрій, цифрової
Формула / Реферат:
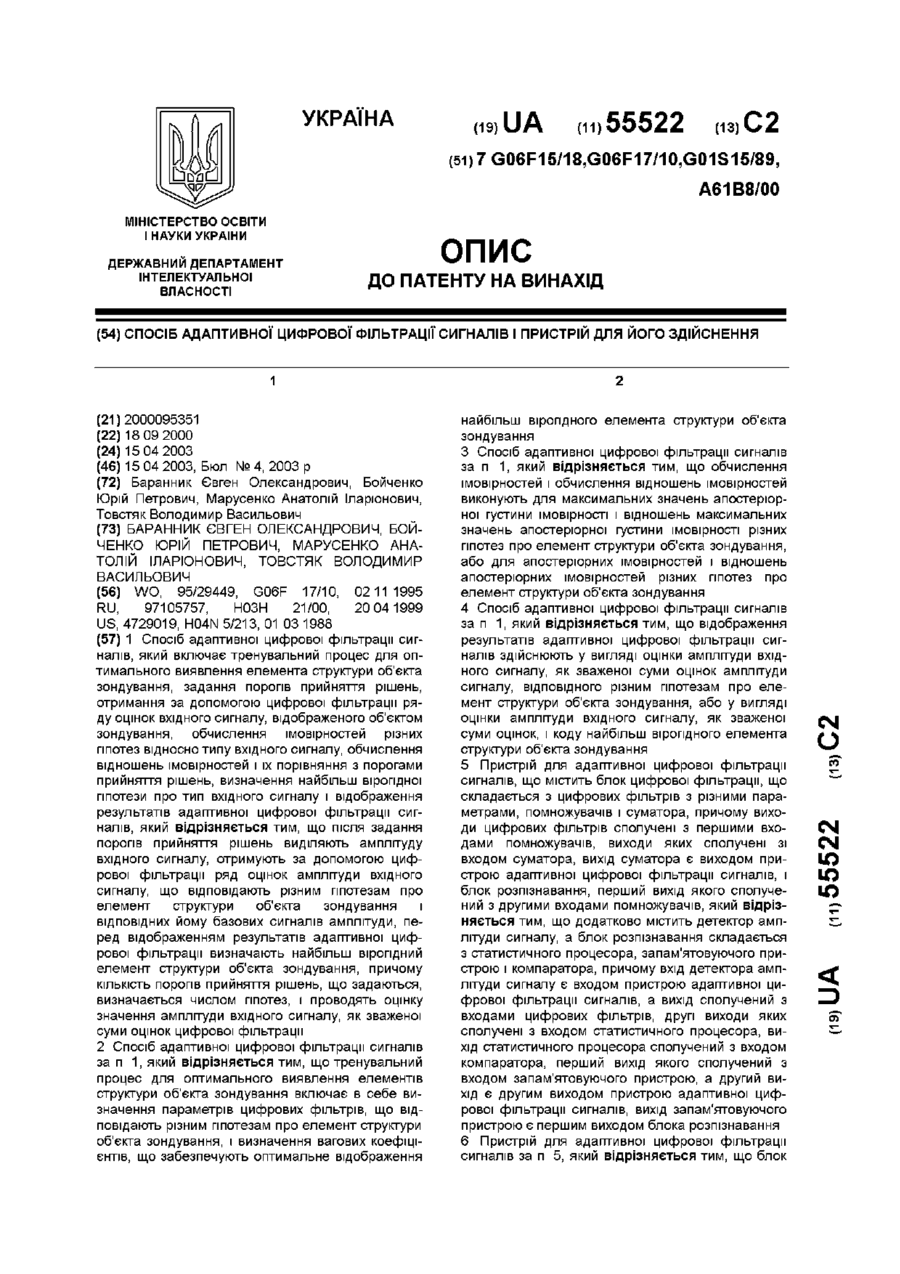
1. Спосіб адаптивної цифрової фільтрації сигналів, який включає тренувальний процес для оптимального виявлення елемента структури об'єкта зондування, задання порогів прийняття рішень, отримання за допомогою цифрової фільтрації ряду оцінок вхідного сигналу, відображеного об'єктом зондування, обчислення імовірностей різних гіпотез відносно типу вхідного сигналу, обчислення відношень імовірностей і їх порівняння з порогами прийняття рішень,...
Попередній патент: Шолом ок для точкового масажу та самомасажу голови і спосіб лікування вертебро-базилярної дисциркуляції за допомогою шолома ок
Наступний патент: Система ідентифікації моделі із змінною структурою
Випадковий патент: Камера згоряння дизельного двигуна внутрішнього згоряння