Спосіб адаптивної цифрової фільтрації сигналів і пристрій для його здійснення
Номер патенту: 55522
Опубліковано: 15.04.2003
Автори: БОЙЧЕНКО ЮРІЙ ПЕТРОВИЧ, МАРУСЕНКО АНАТОЛІЙ ІЛАРІОНОВИЧ, ТОВСТЯК ВОЛОДИМИР ВАСИЛЬОВИЧ, БАРАННИК ЄВГЕН ОЛЕКСАНДРОВИЧ
Формула / Реферат
1. Спосіб адаптивної цифрової фільтрації сигналів, який включає тренувальний процес для оптимального виявлення елемента структури об'єкта зондування, задання порогів прийняття рішень, отримання за допомогою цифрової фільтрації ряду оцінок вхідного сигналу, відображеного об'єктом зондування, обчислення імовірностей різних гіпотез відносно типу вхідного сигналу, обчислення відношень імовірностей і їх порівняння з порогами прийняття рішень, визначення найбільш вірогідної гіпотези про тип вхідного сигналу і відображення результатів адаптивної цифрової фільтрації сигналів, який відрізняється тим, що після задання порогів прийняття рішень виділяють амплітуду вхідного сигналу, отримують за допомогою цифрової фільтрації ряд оцінок амплітуди вхідного сигналу, що відповідають різним гіпотезам про елемент структури об'єкта зондування і відповідних йому базових сигналів амплітуди, перед відображенням результатів адаптивної цифрової фільтрації визначають найбільш вірогідний елемент структури об'єкта зондування, причому кількість порогів прийняття рішень, що задаються, визначається числом гіпотез, і проводять оцінку значення амплітуди вхідного сигналу, як зваженої суми оцінок цифрової фільтрації.
2. Спосіб адаптивної цифрової фільтрації сигналів за п. 1, який відрізняється тим, що тренувальний процес для оптимального виявлення елементів структури об'єкта зондування включає в себе визначення параметрів цифрових фільтрів, що відповідають різним гіпотезам про елемент структури об'єкта зондування, і визначення вагових коефіцієнтів, що забезпечують оптимальне відображення найбільш вірогідного елемента структури об'єкта зондування.
3. Спосіб адаптивної цифрової фільтрації сигналів за п. 1, який відрізняється тим, що обчислення імовірностей і обчислення відношень імовірностей виконують для максимальних значень апостеріорної густини імовірності і відношень максимальних значень апостеріорної густини імовірності різних гіпотез про елемент структури об'єкта зондування, або для апостеріорних імовірностей і відношень апостеріорних імовірностей різних гіпотез про елемент структури об'єкта зондування
4. Спосіб адаптивної цифрової фільтрації сигналів за п. 1, який відрізняється тим, що відображення результатів адаптивної цифрової фільтрації сигналів здійснюють у вигляді оцінки амплітуди вхідного сигналу, як зваженої суми оцінок амплітуди сигналу, відповідного різним гіпотезам про елемент структури об'єкта зондування, або у вигляді оцінки амплітуди вхідного сигналу, як зваженої суми оцінок, і коду найбільш вірогідного елемента структури об'єкта зондування.
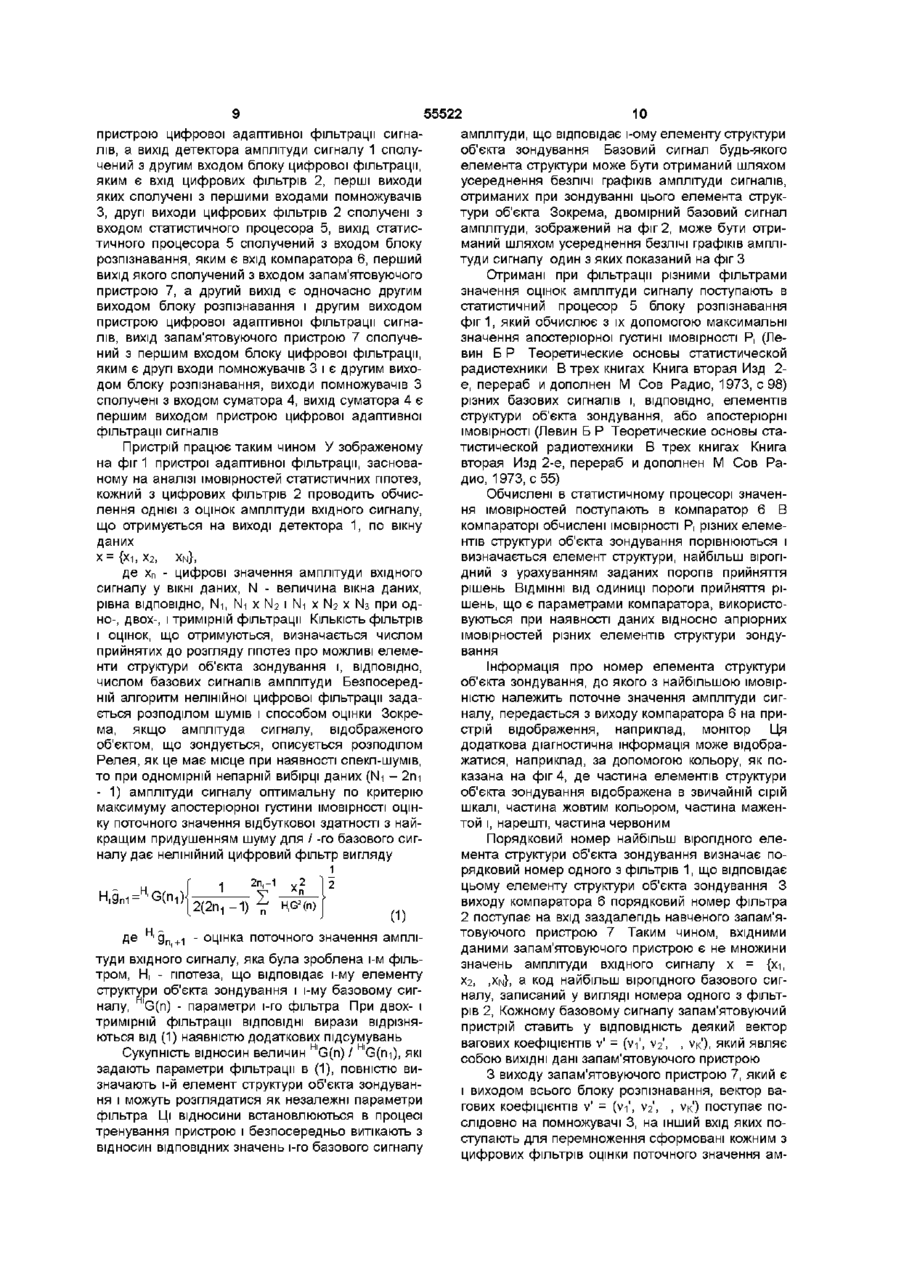
5. Пристрій для адаптивної цифрової фільтрації сигналів, що містить блок цифрової фільтрації, що складається з цифрових фільтрів з різними параметрами, помножувачів і суматора, причому виходи цифрових фільтрів сполучені з першими входами помножувачів, виходи яких сполучені зі входом суматора, вихід суматора є виходом пристрою адаптивної цифрової фільтрації сигналів, і блок розпізнавання, перший вихід якого сполучений з другими входами помножувачів, який відрізняється тим, що додатково містить детектор амплітуди сигналу, а блок розпізнавання складається з статистичного процесора, запам'ятовуючого пристрою і компаратора, причому вхід детектора амплітуди сигналу є входом пристрою адаптивної цифрової фільтрації сигналів, а вихід сполучений з входами цифрових фільтрів, другі виходи яких сполучені з входом статистичного процесора, вихід статистичного процесора сполучений з входом компаратора, перший вихід якого сполучений з входом запам'ятовуючого пристрою, а другий вихід є другим виходом пристрою адаптивної цифрової фільтрації сигналів, вихід запам'ятовуючого пристрою є першим виходом блока розпізнавання.
6. Пристрій для адаптивної цифрової фільтрації сигналів за п. 5, який відрізняється тим, що блок цифрової фільтрації містить М цифрових фільтрів, тип кожного з яких оптимальний по критерію максимуму апостеріорної густини імовірності для фільтрації одного з базових сигналів амплітуди вхідного сигналу, відповідного одній з різних гіпотез про елемент структури об'єкта зондування, і М помножувачів, причому М ![]() і визначається числом базових сигналів амплітуди вхідного сигналу.
і визначається числом базових сигналів амплітуди вхідного сигналу.
Текст
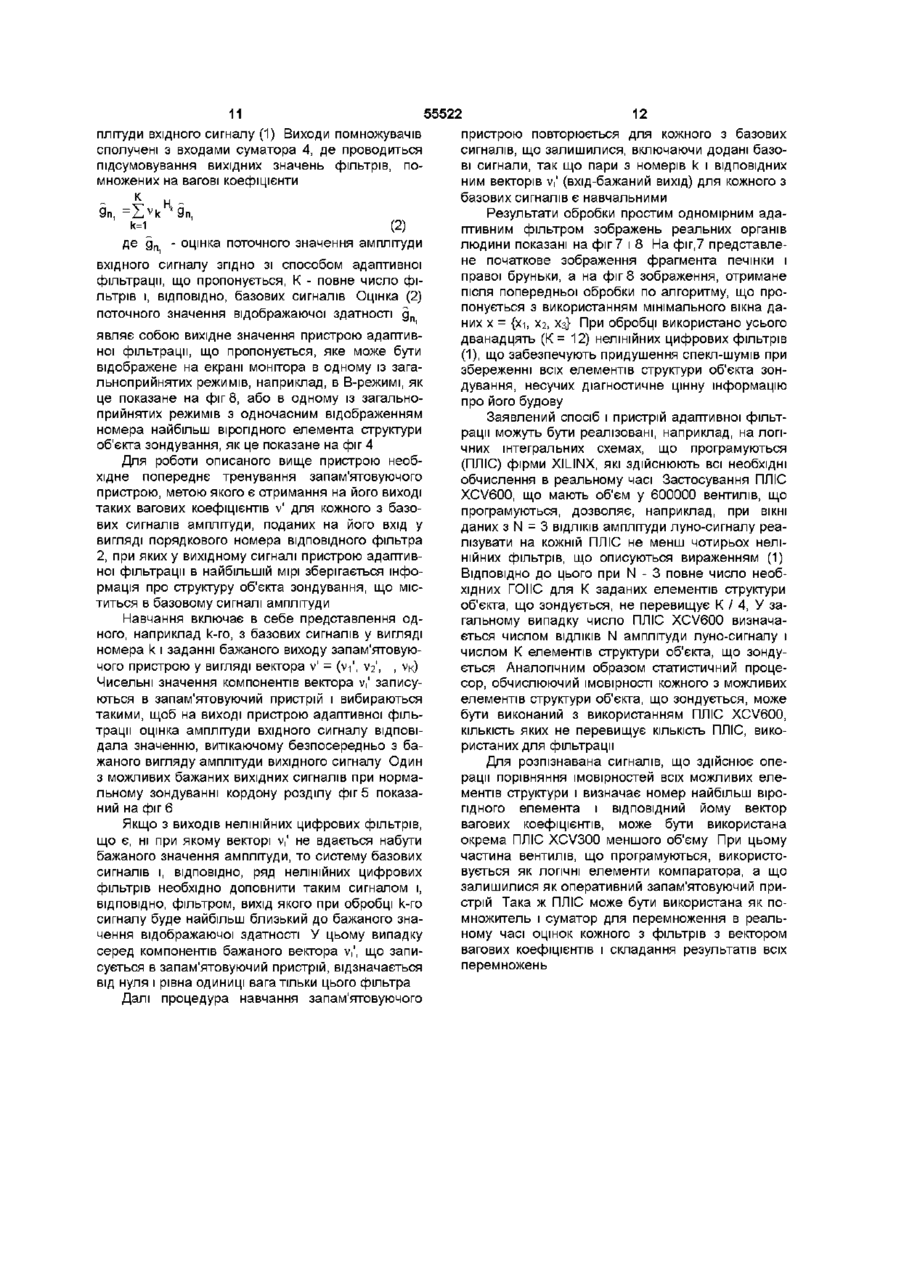
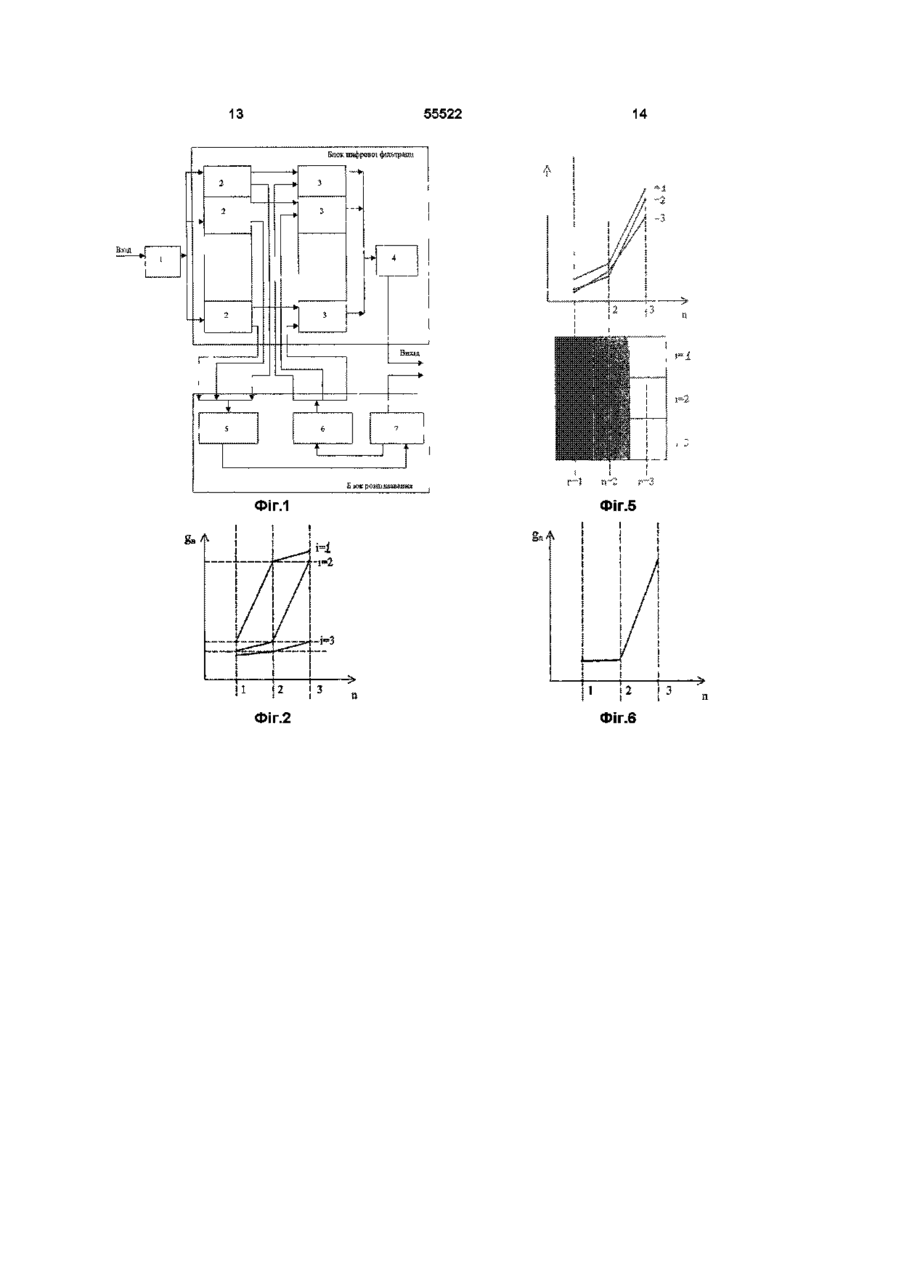
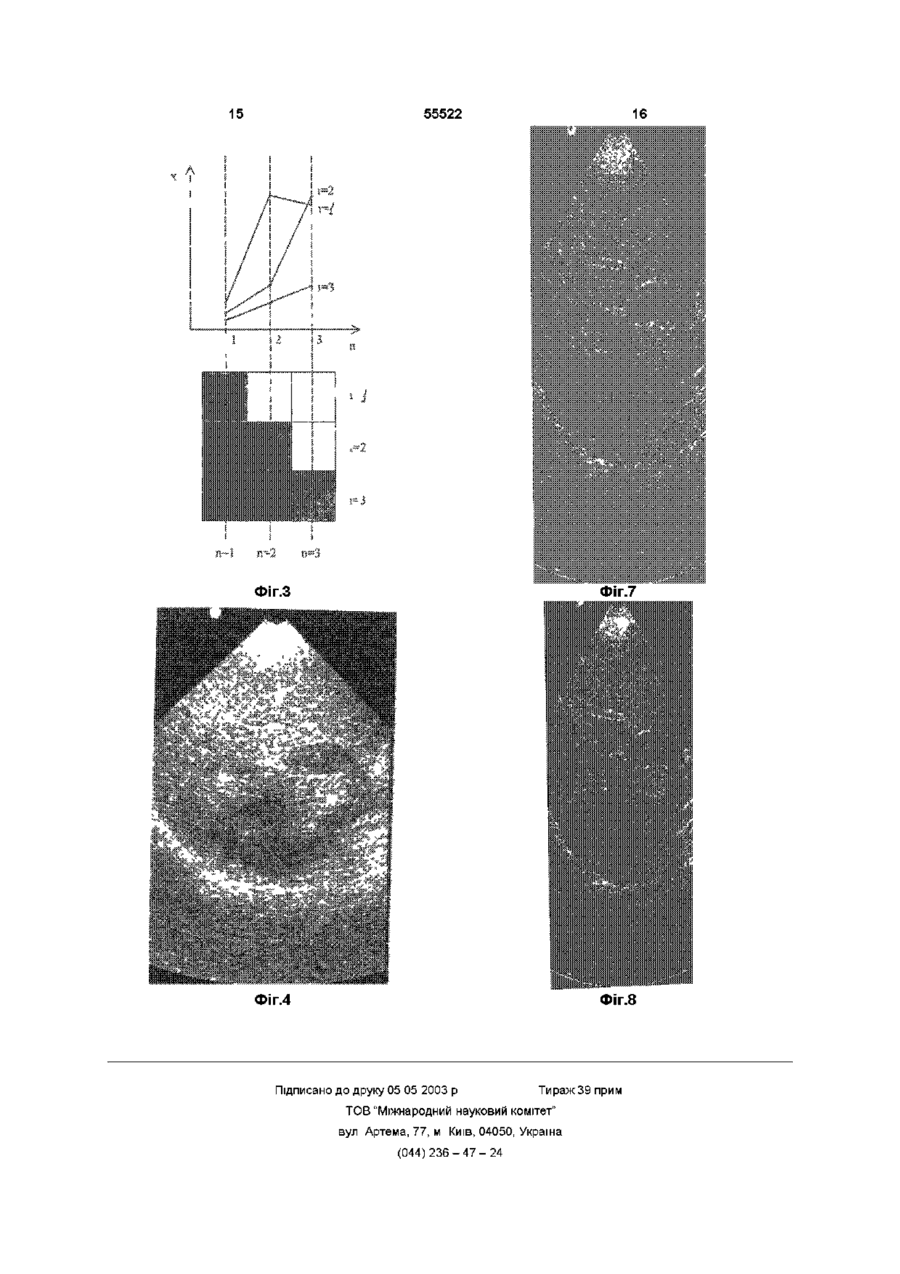
1 Спосіб адаптивної цифрової фільтрації сигналів, який включає тренувальний процес для оптимального виявлення елемента структури об'єкта зондування, задания порогів прийняття рішень, отримання за допомогою цифрової фільтрації ряду оцінок вхідного сигналу, відображеного об'єктом зондування, обчислення імовірностей різних гіпотез відносно типу вхідного сигналу, обчислення відношень імовірностей і їх порівняння з порогами прийняття рішень, визначення найбільш вірогідної гіпотези про тип вхідного сигналу і відображення результатів адаптивної цифрової фільтрації сигналів, який відрізняється тим, що після задания порогів прийняття рішень виділяють амплітуду вхідного сигналу, отримують за допомогою цифрової фільтрації ряд оцінок амплітуди вхідного сигналу, що відповідають різним гіпотезам про елемент структури об'єкта зондування і ВІДПОВІДНИХ йому базових сигналів амплітуди, перед відображенням результатів адаптивної цифрової фільтрації визначають найбільш вірогідний елемент структури об'єкта зондування, причому КІЛЬКІСТЬ порогів прийняття рішень, що задаються, визначається числом гіпотез, і проводять оцінку значення амплітуди вхідного сигналу, як зваженої суми оцінок цифрової фільтрації 2 Спосіб адаптивної цифрової фільтрації сигналів за п 1, який відрізняється тим, що тренувальний процес для оптимального виявлення елементів структури об'єкта зондування включає в себе визначення параметрів цифрових фільтрів, що відповідають різним гіпотезам про елемент структури об'єкта зондування, і визначення вагових коефіцієнтів, що забезпечують оптимальне відображення найбільш вірогідного елемента структури об'єкта зондування 3 Спосіб адаптивної цифрової фільтрації сигналів за п 1, який відрізняється тим, що обчислення імовірностей і обчислення відношень імовірностей виконують для максимальних значень апостеріорної густини імовірності і відношень максимальних значень апостеріорної густини імовірності різних гіпотез про елемент структури об'єкта зондування, або для апостеріорних імовірностей і відношень апостеріорних імовірностей різних гіпотез про елемент структури об'єкта зондування 4 Спосіб адаптивної цифрової фільтрації сигналів за п 1, який відрізняється тим, що відображення результатів адаптивної цифрової фільтрації сигналів здійснюють у вигляді оцінки амплітуди вхідного сигналу, як зваженої суми оцінок амплітуди сигналу, ВІДПОВІДНОГО різним гіпотезам про елемент структури об'єкта зондування, або у вигляді оцінки амплітуди вхідного сигналу, як зваженої суми оцінок, і коду найбільш вірогідного елемента структури об'єкта зондування 5 Пристрій для адаптивної цифрової фільтрації сигналів, що містить блок цифрової фільтрації, що складається з цифрових фільтрів з різними параметрами, помножувачів і суматора, причому виходи цифрових фільтрів сполучені з першими входами помножувачів, виходи яких сполучені зі входом суматора, вихід суматора є виходом пристрою адаптивної цифрової фільтрації сигналів, і блок розпізнавання, перший вихід якого сполучений з другими входами помножувачів, який відрізняється тим, що додатково містить детектор амплітуди сигналу, а блок розпізнавання складається з статистичного процесора, запам'ятовуючого пристрою і компаратора, причому вхід детектора амплітуди сигналу є входом пристрою адаптивної цифрової фільтрації сигналів, а вихід сполучений з входами цифрових фільтрів, другі виходи яких сполучені з входом статистичного процесора, вихід статистичного процесора сполучений з входом компаратора, перший вихід якого сполучений з входом запам'ятовуючого пристрою, а другий вихід є другим виходом пристрою адаптивної цифрової фільтрації сигналів, вихід запам'ятовуючого пристрою є першим виходом блока розпізнавання 6 Пристрій для адаптивної цифрової фільтрації сигналів за п 5, який відрізняється тим, що блок О ю ю ю цифрової фільтрації містить М цифрових фільтрів, тип кожного з яких оптимальний по критерію максимуму апостеріорної густини імовірності для фільтрації одного з базових сигналів амплітуди вхідного сигналу, ВІДПОВІДНОГО одній з різних гіпотез 55522 про елемент структури об'єкта зондування, і М помножувачів, причому М >2 і визначається числом базових сигналів амплітуди вхідного сигналу Винахід відноситься до радіотехніки, зокрема, до адаптивної фільтрації цифрових сигналів і може знайти застосування в медичній візуалізацм Відомий пристрій і спосіб для адаптивної фільтрації зображень, заснований на подібності гістограм (Dong-Chyuan Liu, System and method for adaptive filtering of images based on similarity between histograms, United States Patent, US 005594807A, Jan 14, 1997) Пристрій складається з процесора і запам'ятовуючого пристрою, а спосіб включає в себе обчислення гістограми амплітуди відображеного об'єктом сигналу, що зондується, її порівняння з обчисленою гістограмою амплітуди сигналу, що характеризується розвиненою структурою спекл-шумів, згладжуючу фільтрацію амплітуди сигналів ВІДПОВІДНО до результатів порівняння і відображення її результатів Недоліком запропонованого способу є спотворення і часткова втрата інформації про об'єкт, що зондується Це викликане тим, що гістограми обчислюються в реальному часі по статистично малих вибірках даних, що визначає нестійкість їх оцінки, а також характерною для даного способу втратою інформації про ті елементи структури об'єкта зондування, статистичні ознаки яких близькі до статистичних ознак спекл-шуму Крім того, при згладжуючій фільтрації втрачається діагностична інформація, що міститься в самих спекл-шумах 3 точки зору медичної діагностики спекл-шуми можуть трактуватися і як шум, і як інформативний діагностичний сигнал в залежності від контексту, в якому розглядається дане зображення Зокрема, правильні діагностичні висновки можуть бути зроблені з особливостей спекл-текстури зображення Тому при фільтрації часто необхідно видаляти тільки неінформативну частину спекл-шумів, до якої відноситься, зокрема, динамічна складової спекл-шуму Під динамічною тут розуміється та частина спекл-шумів, яка змінюється при ЗМІНІ кадрів в результаті мікрорухів в області зондування і мікрозсування зондувального перетворювача Відома адаптивна фільтрація для придушення спекл-шумів в ультразвукових луна-імпульсних і інших зображеннях (J С Bamber, Adaptive filtering for redaction of speckle in ultrasonic pulse-echo and other images, UK Patent application, GB 2168482A, 12 Dec 1985) реалізується за допомогою пристрою, що складається з статистичного процесора, компаратора і фільтра із змінною смугою пропускання, призначеного для згладжування амплітуди сигналів, статистичні ознаки яких близькі до спеклшумових Недоліком даної адаптивної фільтрації є спотворення і часткова втрата інформації про об'єкт, що зондується Це викликане тим, що при фільт рації в реальному масштабі часу статистичні ознаки сигналу обчислюються по статистично малій вибірці даних, що визначає нестійкість їх оцінки, а також характерною для даного способу втратою інформації про ті структури об'єкта, статистичні ознаки яких близькі до статистичних ознак спеклшуму Крім того, через застосування згладжуючої фільтрації неможливо збереження діагностичної інформації, що міститься в самих спекл-шумах Відомий пристрій - класифікатор сигналів з адаптивною фільтрацією і нейронною мережею (S J Engel, Adaptive filtering neural network classifier, United States Patent, US 005761383A, Jun 2, 1998) яке складається з ряду фільтрів і класифікатора сигналів у вигляді нейронної мережі Класифікація сигналів і адаптивна фільтрація здійснюється за допомогою фільтрації сигналу рядом смугових фільтрів, після чого інформація про результати фільтрації кожним з смугових фільтрів є основою для класифікації сигналу нейронной мережею За результатами класифікації визначаються частотні характеристики сигналу і ваги для кожного з смугових фільтрів Адаптивна фільтрація проводиться шляхом складання вихідних сигналів фільтрів з вказаною вагою Недоліком даного пристрою є часткова втрата інформації про об'єкт, що зондується Це викликане використанням в пристрої смугових фільтрів, статистична точність спектральної оцінки яких при роботі в реальному масштабі часу нестійка для сигналів з частотними характеристиками, що змінюються Можливості використання в реальному масштабі часу класифікатора сигналів, що описується, з адаптивною фільтрацією обмежуються також великим об'ємом обчислень, що проводяться нейронною мережею для достовірної класифікації сигналу Найбільш близьким за технічним рішенням до способу, що пропонується, є спосіб, викладений в статті «Байєсовське ультразвукове зондування об'єкта з частотним розділенням» (J Sanne, T Wang, X Jin , Frequency diverse Bayesian ultrasound flaw detection, IEEE Ultrasonics Symposium Proceedings, 1989, p 1135) і включаючий тренувальний процес для оптимального виявлення елемента структури об'єкта зондування, завдання порогів прийняття рішень, отримання за допомогою фільтрації ряду оцінок вхідного сигналу, відображеного об'єктом зондування, обчислення імовірностей різних гіпотез відносно типу вхідного сигналу, обчислення відносин імовірностей і порівняння відносин імовірностей з порогами прийняття рішень, визначення найбільш вірогідної гіпотези про тип вхідного сигналу і відображення результатів цифрової адаптивної фільтрації сигналів 55522 Спосіб заснований на фільтрації відображеного об'єктом високочастотного сигналу, що зондується рядом смугових фільтрів Отримані на виході кожного з смугових фільтрів оцінки вхідного сигналу служать для обчислення умовних імовірностей того, що сигнал має корисну складову, що містить інформацію про структуру об'єкта, що зондується, і того, що сигнал являє собою сигнал спекл-шуму Порівняння отриманих імовірностей з урахуванням заздалегідь заданого порога прийняття рішення про те, містить сигнал Інформацію про структуру об'єкта, що зондується, чи ні, є основою для подальшої фільтрації луна-сигналу з метою виділення його корисної частотної складової, несучою максимум інформації про структуру об'єкта, що відображається Недоліком даного способу є часткова втрата інформації про об'єкт, що зондується і неможливість збереження, при необхідності, діагностичне значущої складової спекл-шумів Це викликане використанням смугових фільтрів, статистична точність спектральної оцінки яких при роботі в реальному масштабі часу нестійка для сигналів з частотними характеристиками, що змінюються, а також характерною для даного способу втратою інформації про ті структури об'єкта, статистичні ознаки яких близькі до статистичних ознак спеклшуму Недоліком даного способу є також практична неможливість його реалізації в реальному масштабі часу, оскільки спосіб вимагає обробки статистичних вибірок даних високочастотного сигналу, відображеного об'єктом зондування Найбільш близьким за технічним рішенням до пристрою, що пропонується є динамічний цифровий фільтр, що використовує нейронну мережу (DW Moses, СН, Hustig, J Kmne, HL Najafi, Dynamic digital filter using neural networks, PCT, WO95/29449, 2 November 1995), включаючий блок цифрової фільтрації, що складається з цифрових фільтрів з різними параметрами, помножл&в&Ш і суматора, причому виходи цифрових фільтрів сполучені з входами помножувачів, виходи яких сполучені зі входом суматора, вихід суматора є виходом пристрою цифрової адаптивної фільтрації сигналів, і блок розпізнавання, вихід якого сполучений з другими входами помножувачів Недоліком даного динамічного цифрового фільтра є часткова втрата інформації про об'єкт, що зондується Це пов'язано з необхідністю попереднього визначення спектрального складу сигналу, що фільтрується, статистична оцінка точності якого при роботі в реальному масштабі часу нестійка для сигналів з частотними характеристиками, що змінюються, а також із застосуванням фільтрів, частотні характеристики яких оптимальні тільки для фільтрації періодичних і аперіодичних сигналів Крім того, можливості адаптивної фільтрації сигналів в реальному масштабі часу обмежені великим об'ємом обчислень, що проводяться для визначення спектрального складу сигналу, і великим об'ємом обчислень, що проводяться нейронною мережею для достовірної класифікації сигналу У основу групи винаходів поставлена задача удосконалення способу цифрової адаптивної фільтрації сигналів і пристрою для його виконання шляхом аналізу імовірностей статистичних гіпотез відносно типу сигналу по статистичних вибірках даних про амплітуду сигналу забезпечити придушення шумовой складової сигналу в реальному масштабі часу без втрати інформації про структуру об'єкта, що зондується, збереження, при необхідності, діагностичної інформації, що міститься в спекл-шумах, і виділення додаткової інформації про структуру об'єкта, що зондується Поставлена задача вирішується таким чином 1 Спосіб цифрової адаптивної фільтрації сигналів, включаючий тренувальний процес для оптимального виявлення елемента структури об'єкта зондування, завдання порогів прийняття рішень, отримання за допомогою цифрової фільтрації ряду оцінок вхідного сигналу, відображеного об'єктом зондування, обчислення імовірностей різних гіпотез відносно типу вхідного сигналу, обчислення відношень імовірностей і їх порівняння з порогами прийняття рішень, визначення найбільш вірогідної гіпотези про тип вхідного сигналу і відображення результатів цифрової адаптивної фільтрації сигналів, який відрізняється тим, що після задания порогів прийняття рішень виділяють амплітуду вхідного сигналу, отримують за допомогою цифрової фільтрації ряд оцінок амплітуди вхідного сигналу, що відповідають різним гіпотезам про елемент структури об'єкта зондування і ВІДПОВІДНИХ ним базовим сигналам амплітуди, перед відображенням результатів цифрової адаптивної фільтрації визначають найбільш вірогідний елемент структури об'єкта зондування, причому КІЛЬКІСТЬ порогів прийняття рішень, що задаються, визначається числом гіпотез, і проводять оцінку значення амплітуди вхідного сигналу, як зваженої суми оцінок цифрової фільтрації 2 Спосіб цифрової адаптивної фільтрації сигналів по п 1, який відрізняється тим, що тренувальний процес для оптимального виявлення елементів структури об'єкта зондування включає в себе визначення параметрів цифрових фільтрів, що відповідають різним гіпотезам про елемент структури об'єкта зондування, і визначення вагових коефіцієнтів, що забезпечують оптимальне відображення найбільш вірогідного елемента структури об'єкта зондування 3 Спосіб цифрової адаптивної фільтрації сигналів по п 1, який відрізняється тим, що обчислення імовірностей і обчислення відношень імовірностей виконують для максимальних значень апостеріорної ЩІЛЬНОСТІ імовірності і відношень максимальних значень апостеріорної ЩІЛЬНОСТІ імовірності різних гіпотез про елемент структури об'єкта зондування, або для апостеріорних імовірностей і відношень апостеріорних імовірностей різних гіпотез про елемент структури об'єкта зондування 4 Спосіб цифрової адаптивної фільтрації сигналів по п 1, який відрізняється тим, що відображення результатів цифрової адаптивної фільтрації сигналів здійснюється у вигляді оцінки амплітуди вхідного сигналу, як зваженої суми оцінок амплітуди сигналу, ВІДПОВІДНОГО різним гіпотезам про елемент структури об'єкта зондування, або у вигляді оцінки амплітуди вхідного сигналу, як зваженої суми оцінок, і коду найбільш вірогідного елемента структури об'єкта зондування 55522 5 Пристрій для цифрової адаптивної фільтрації сигналів, що містить блок цифрової фільтрації, що складається з цифрових фільтрів з різними параметрами, помножувачів і суматора, причому виходи цифрових фільтрів сполучені з першими входами помножувачів, виходи яких сполучені зі входом суматора, вихід суматора є виходом пристрою цифрової адаптивної фільтрації сигналів, і блок розпізнавання, перший вихід якого сполучений з другими входами помножувачів, який відрізняється тим, що додатково містить детектор амплітуди сигналу, а блок розпізнавання складається з статистичного процесора, запам'ятовуючого пристрою і компаратора, причому вхід детектора амплітуди сигналу є входом пристрою цифрової адаптивної фільтрації сигналів, а вихід сполучений з входами цифрових фільтрів, другі виходи яких сполучені з входом статистичного процесора, вихід статистичного процесора сполучений з входом компаратора, перший вихід якого сполучений з входом запам'ятовуючого пристрою, а другий вихід є другим виходом пристрою цифрової адаптивної фільтрації сигналів, вихід запам'ятовуючого пристрою є першим виходом блоку розпізнавання 6 Пристрій для цифрової адаптивної фільтрації сигналів по п 5, який відрізняється тим, що блок цифрової фільтрації містить М цифрових фільтрів, тип кожного з яких оптимальний по критерію максимуму апостеріорної ЩІЛЬНОСТІ імовірності для фільтрації одного з базових сигналів амплітуди вхідного сигналу, ВІДПОВІДНОГО ОДНІЙ З різних гіпотез про елемент структури об'єкта зондування, і М помножувачів, причому М > 2 і визначається числом базових сигналів амплітуди вхідного сигналу Спосіб цифрової адаптивної фільтрації сигналів і пристрій для його виконання, що заявляються, у відомих джерелах інформації не виявлені, що дозволяє вважати їх новими ВІДМІННІ ознаки в своїй сукупності є необхідними і достатніми для досягнення поставленої мети, в інших відомих технічних рішеннях не виявлені, що забезпечує групі винаходів ВІДПОВІДНІСТЬ критерію «винахідницький рівень» Введення в пристрій, що заявляється, детектора амплітуди вхідного сигналу, застосування в блоці розпізнавання статистичного процесора, запам'ятовуючого пристрою і компаратора, а також нові зв'язки між елементами пристрою, дозволяють реалізувати запропонований спосіб цифрової адаптивної фільтрації сигналів і тим самим забезпечити придушення шумової складової сигналу в реальному масштабі часу без втрати інформації про структуру об'єкта, що зондується, збереження, при необхідності, діагностичній інформації, що міститься в спекл-шумах, і виділення додаткової інформації про структуру об'єкта, що зондується На фіг 1 приведена блок-схема пристрою для цифрової адаптивної фільтрації сигналів На фіг 2 показаний двомірний базовий сигнал амплітуди вхідного сигналу, відображеного об'єктом зондування, при зондуванні під кутом такого елемента структури об'єкта зондування, як межа розділу двох середовищ з різними відображаючими можливостями На фіг 3 показані графіки амплітуди вхідного 8 сигналу при зондуванні під кутом меж/ розділу двох середовищ з різними відображаючими здібностями На фіг 4 показане зображення фрагмента печінки і правої бруньки, на якому частина елементів структури об'єктів зондування відображена в звичайній сірій шкалі, частина жовтим кольором, частина мажентой і, нарешті, частина червоним На фіг 5 показані графіки амплітуди вхідного сигналу при нормальному зондуванні кордону розділу двох серед з різними відображаючими здібностями На фіг 6 показаний можливий бажаний вихідний сигнал амплітуди для меж/ розділу двох середовищ при нормальному зондуванні На фіг 7 представлене початкове зображення фрагмента печінки і правої бруньки На фіг 8 представлене зображення, отримане після попередньої обробки за способом, що пропонується Спосіб цифрової адаптивної фільтрації сигналів включає в себе проведення тренувального процесу для оптимального виявлення елементів структури об'єкта зондування, що включає в себе визначення вагових коефіцієнтів, що забезпечують оптимальне відображення найбільш вірогідного елемента структури об'єкта зондування і визначення параметрів цифрових фільтрів, завдання порогів прийняття рішень, КІЛЬКІСТЬ яких визначається числом гіпотез відносно типу сигналу, відображеного об'єктом зондування, виділення амплітуди вхідного сигналу, отримання за допомогою цифрової фільтрації ряду оцінок амплітуди вхідного сигналу, що відповідають різним гіпотезам про елемент структури об'єкта зондування і ВІДПОВІДНИХ йому базовим сигналам амплітуди, обчислення імовірностей різних гіпотез відносно типу вхідного сигналу і обчислення імовірностей, які виконуються для максимальних значень апостеріорної густини імовірності або для апостеріорних імовірностей і порівняння відношень з порогами прийняття рішень, визначення найбільш вірогідної гіпотези про тип вхідного сигналу, проведення оцінки значення амплітуди вхідного сигналу, як зваженої суми оцінок цифрової фільтрації, визначення найбільш вірогідного елемента структури об'єкта зондування і відображення результатів цифрової адаптивної фільтрації сигналів, яке здійснюється у вигляді оцінки амплітуди вхідного сигналу, як зваженої суми оцінок амплітуди сигналу, ВІДПОВІДНОГО різним гіпотезам про елемент структури об'єкта зондування, або у вигляді оцінки амплітуди вхідного сигналу, як зваженої суми оцінок, і коду найбільш імовірного елемента структури об'єкта зондування Реалізація способу цифрової адаптивної фільтрації сигналів, що заявляється, здійснюється за допомогою пристрою поданого на фіг 1, який включає детектор амплітуди вхідного сигналу 1, блок цифрової фільтрації і блок розпізнавання Блок цифрової фільтрації складається з М цифрових фільтрів 2, М помножителей 3 і суматора сигналів 4 Блок розпізнавання включає в себе статистичний процесор 5, компаратор 6 і запам'ятовуючий пристрій 7 Вхід детектора амплітуди сигналу 1 є входом 55522 пристрою цифрової адаптивної фільтрації сигналів, а вихід детектора амплітуди сигналу 1 сполучений з другим входом блоку цифрової фільтрації, яким є вхід цифрових фільтрів 2, перші виходи яких сполучені з першими входами помножувачів З, другі виходи цифрових фільтрів 2 сполучені з входом статистичного процесора 5, вихід статистичного процесора 5 сполучений з входом блоку розпізнавання, яким є вхід компаратора 6, перший вихід якого сполучений з входом запам'ятовуючого пристрою 7, а другий вихід є одночасно другим виходом блоку розпізнавання і другим виходом пристрою цифрової адаптивної фільтрації сигналів, вихід запам'ятовуючого пристрою 7 сполучений з першим входом блоку цифрової фільтрації, яким є другі входи помножувачів 3 і є другим виходом блоку розпізнавання, виходи помножувачів З сполучені з входом суматора 4, вихід суматора 4 є першим виходом пристрою цифрової адаптивної фільтрації сигналів Пристрій працює таким чином У зображеному на фіг 1 пристрої адаптивної фільтрації, заснованому на аналізі імовірностей статистичних гіпотез, кожний з цифрових фільтрів 2 проводить обчислення однієї з оцінок амплітуди вхідного сигналу, що отримується на виході детектора 1, по вікну даних Х={Хі,Х2, X N }, де хп - цифрові значення амплітуди вхідного сигналу у ВІКНІ даних, N - величина вікна даних, рівна ВІДПОВІДНО, N-i, N1 х N2 і N1 х N2 х N3 при од но-, двох-, і тримірній фільтрації КІЛЬКІСТЬ фільтрів і оцінок, що отримуються, визначається числом прийнятих до розгляду гіпотез про можливі елементи структури об'єкта зондування і, ВІДПОВІДНО, числом базових сигналів амплітуди Безпосередній алгоритм нелінійної цифрової фільтрації задається розподілом шумів і способом оцінки Зокрема, якщо амплітуда сигналу, відображеного об'єктом, що зондується, описується розподілом Релея, як це має місце при наявності спекл-шумів, то при одномірній непарній вибірці даних (Ni - 2пі - 1) амплітуди сигналу оптимальну по критерію максимуму апостеріорної густини імовірності оцінку поточного значення відбуткової здатності з найкращим придушенням шуму для / -го базового сигналу дає нелінійний цифровий фільтр вигляду де Н| g n + 1 - оцінка поточного значення амплітуди вхідного сигналу, яка була зроблена і-м фільтром, И, - гіпотеза, що відповідає і-му елементу структури об'єкта зондування і і-му базовому сигналу, 'G(n) - параметри і-го фільтра При двох- і тримірній фільтрації ВІДПОВІДНІ вирази відрізняються від (1) наявністю додаткових підсумувань Сукупність відносин величин HlG(n) / HlG(ni), які задають параметри фільтрації в (1), повністю визначають і-й елемент структури об'єкта зондування і можуть розглядатися як незалежні параметри фільтра Ці ВІДНОСИНИ встановлюються в процесі тренування пристрою і безпосередньо витікають з відносин ВІДПОВІДНИХ значень і-го базового сигналу 10 амплітуди, що відповідає і-ому елементу структури об'єкта зондування Базовий сигнал будь-якого елемента структури може бути отриманий шляхом усереднення безлічі графіків амплітуди сигналів, отриманих при зондуванні цього елемента структури об'єкта Зокрема, двомірний базовий сигнал амплітуди, зображений на фіг 2, може бути отриманий шляхом усереднення безлічі графіків амплітуди сигналу один з яких показаний на фіг З Отримані при фільтрації різними фільтрами значення оцінок амплітуди сигналу поступають в статистичний процесор 5 блоку розпізнавання фіг1, який обчислює з їх допомогою максимальні значення апостеріорної густині імовірності Р, (Левин Б Р Теоретические основы статистической радиотехники В трех книгах Книга вторая Изд 2е, перераб и дополнен М Сов Радио, 1973, с 98) різних базових сигналів і, ВІДПОВІДНО, елементів структури об'єкта зондування, або апостеріорні імовірності (Левин Б Р Теоретические основы статистической радиотехники В трех книгах Книга вторая Изд 2-е, перераб и дополнен М Сов Радио, 1973, с 55) Обчислені в статистичному процесорі значення імовірностей поступають в компаратор 6 В компараторі обчислені імовірності Р, різних елементів структури об'єкта зондування порівнюються і визначається елемент структури, найбільш вірогідний з урахуванням заданих порогів прийняття рішень ВІДМІННІ ВІД ОДИНИЦІ пороги прийняття рішень, що є параметрами компаратора, використовуються при наявності даних відносно апріорних імовірностей різних елементів структури зондування Інформація про номер елемента структури об'єкта зондування, до якого з найбільшою імовірністю належить поточне значення амплітуди сигналу, передається з виходу компаратора 6 на пристрій відображення, наприклад, монітор Ця додаткова діагностична інформація може відображатися, наприклад, за допомогою кольору, як показана на фіг 4, де частина елементів структури об'єкта зондування відображена в звичайній сірій шкалі, частина жовтим кольором, частина мажентой і, нарешті, частина червоним Порядковий номер найбільш вірогідного елемента структури об'єкта зондування визначає порядковий номер одного з фільтрів 1, що відповідає цьому елементу структури об'єкта зондування З виходу компаратора 6 порядковий номер фільтра 2 поступає на вхід заздалегідь навченого запам'ятовуючого пристрою 7 Таким чином, вхідними даними запам'ятовуючого пристрою є не множини значень амплітуди вхідного сигналу х = {х-і, Х2, ,Х|\}, а код найбільш вірогідного базового сигналу, записаний у вигляді номера одного з фільтрів 2, Кожному базовому сигналу запам'ятовуючий пристрій ставить у ВІДПОВІДНІСТЬ деякий вектор вагових коефіцієнтів v' = (v-Г, V21, , VK'), ЯКИЙ ЯВЛЯЄ собою ВИХІДНІ дані запам'ятовуючого пристрою З виходу запам'ятовуючого пристрою 7, який є і виходом всього блоку розпізнавання, вектор вагових коефіцієнтів v' = (v-Г, V21, , VK') поступає послідовно на помножувачі 3, на інший вхід яких поступають для перемноження сформовані кожним з цифрових фільтрів оцінки поточного значення ам 12 11 55522 плітуди вхідного сигналу (1) Виходи помножувачів пристрою повторюється для кожного з базових сигналів, що залишилися, включаючи додані базосполучені з входами суматора 4, де проводиться ві сигнали, так що пари з номерів k і ВІДПОВІДНИХ підсумовування вихідних значень фільтрів, поним векторів V,' (вхід-бажаний вихід) для кожного з множених на вагові коефіцієнти базових сигналів є навчальними к н к 9n, = I > k 9п, Результати обробки простим одномірним адаптивним фільтром зображень реальних органів к=1 (2) людини показані на фіг 7 і 8 На фіг,7 представледе g n - оцінка поточного значення амплітуди не початкове зображення фрагмента печінки і вхідного сигналу згідно зі способом адаптивної правої бруньки, а на фіг 8 зображення, отримане фільтрації, що пропонується, К - повне число фіпісля попередньої обробки по алгоритму, що прольтрів і, ВІДПОВІДНО, базових сигналів Оцінка (2) понується з використанням мінімального вікна дапоточного значення відображаючої здатності g n них х = {хі, Х2, хз} При обробці використано усього являє собою вихідне значення пристрою адаптивної фільтрації, що пропонується, яке може бути відображене на екрані монітора в одному із загальноприйнятих режимів, наприклад, в В-режимі, як це показане на фіг 8, або в одному із загальноприйнятих режимів з одночасним відображенням номера найбільш вірогідного елемента структури об'єкта зондування, як це показане на фіг 4 Для роботи описаного вище пристрою необхідне попереднє тренування запам'ятовуючого пристрою, метою якого є отримання на його виході таких вагових коефіцієнтів v' для кожного з базових сигналів амплітуди, поданих на його вхід у вигляді порядкового номера ВІДПОВІДНОГО фільтра 2, при яких у вихідному сигналі пристрою адаптивної фільтрації в найбільшій мірі зберігається інформація про структуру об'єкта зондування, що міститься в базовому сигналі амплітуди Навчання включає в себе представлення одного, наприклад k-го, з базових сигналів у вигляді номера к і заданні бажаного виходу запам'ятовуючого пристрою у вигляді вектора v' = (v-Г, V21, , v«) Чисельні значення компонентів вектора v,' записуються в запам'ятовуючий пристрій і вибираються такими, щоб на виході пристрою адаптивної фільтрації оцінка амплітуди вхідного сигналу відповідала значенню, витікаючому безпосередньо з бажаного вигляду амплітуди вихідного сигналу Один з можливих бажаних вихідних сигналів при нормальному зондуванні кордону розділу фіг 5 показаний на фіг 6 Якщо з виходів нелінійних цифрових фільтрів, що є, ні при якому векторі V,' не вдається набути бажаного значення амплітуди, то систему базових сигналів і, ВІДПОВІДНО, ряд нелінійних цифрових фільтрів необхідно доповнити таким сигналом і, ВІДПОВІДНО, фільтром, вихід якого при обробці к-го сигналу буде найбільш близький до бажаного значення відображаючої здатності У цьому випадку серед компонентів бажаного вектора v,', що записується в запам'ятовуючий пристрій, відзначається від нуля і рівна одиниці вага тільки цього фільтра Далі процедура навчання запам'ятовуючого дванадцять (К = 12) нелінійних цифрових фільтрів (1), що забезпечують придушення спекл-шумів при збереженні всіх елементів структури об'єкта зондування, несучих діагностичне цінну інформацію про його будову Заявлений спосіб і пристрій адаптивної фільтрації можуть бути реалізовані, наприклад, на логічних інтегральних схемах, що програмуються (ПЛІС) фірми XILINX, які здійснюють всі необхідні обчислення в реальному часі Застосування ПЛІС XCV600, що мають об'єм у 600000 вентилів, що програмуються, дозволяє, наприклад, при ВІКНІ даних з N = 3 ВІДЛІКІВ амплітуди луно-сигналу реалізувати на кожній ПЛІС не менш чотирьох нелінійних фільтрів, що описуються вираженням (1) ВІДПОВІДНО ДО ЦЬОГО при N - 3 повне число необхідних ГОІІС для К заданих елементів структури об'єкта, що зондується, не перевищує К / 4, У загальному випадку число ПЛІС XCV600 визначається числом ВІДЛІКІВ N амплітуди луно-сигналу і числом К елементів структури об'єкта, що зондується Аналогічним образом статистичний процесор, обчислюючий імовірності кожного з можливих елементів структури об'єкта, що зондується, може бути виконаний з використанням ПЛІС XCV600, КІЛЬКІСТЬ яких не перевищує КІЛЬКІСТЬ ПЛІС, використаних для фільтрації Для розпізнавана сигналів, що здійснює операції порівняння імовірностей всіх можливих елементів структури і визначає номер найбільш вірогідного елемента і ВІДПОВІДНИЙ йому вектор вагових коефіцієнтів, може бути використана окрема ПЛІС XCV300 меншого об'єму При цьому частина вентилів, що програмуються, використовується як ЛОГІЧНІ елементи компаратора, а що залишилися як оперативний запам'ятовуючий пристрій Така ж ПЛІС може бути використана як помножитель і суматор для перемноження в реальному часі оцінок кожного з фільтрів з вектором вагових коефіцієнтів і складання результатів всіх перемножень 13 55522 ФІГ.1 К 1 1 I 1 1 1 ! І // s / 1 І 1 1 i=l -f 1=2 /I / і / ' / 1 І 1 і / X Фіг.5 і І І і /1 1 1 ' ! і/ / // / 1 1 t і —^ -i=3 •ps— ! І І 1 1 1 і 14 І2 Фіг.2 ! і ! г !3 > n 55522 15 16 Фіг.З Фіг.7 Фіг.4 Фіг.8 Підписано до друку 05 05 2003 р Тираж 39 прим ТОВ "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)236-47-24
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for adaptive filtering of signals and the device for realization of the method
Автори англійськоюBarannyk Yevhen Oleksandrovych, Boichenko Yurii Petrovych, Marusenko Anatolii Ilarionovych, Tovstiak Volodymyr Vasyliovych
Назва патенту російськоюСпособ адаптивной цифровой фильтрации сигналов и устройство для осуществления способа
Автори російськоюБаранник Евгений Александрович, Бойченко Юрий Петрович, Марусенко Анатолий Илларионович, Товстяк Владимир Васильевич
МПК / Мітки
МПК: G06F 17/10, G01S 15/00, A61B 8/00, G06F 15/18
Мітки: спосіб, цифрової, фільтрації, адаптивної, пристрій, здійснення, сигналів
Код посилання
<a href="https://ua.patents.su/8-55522-sposib-adaptivno-cifrovo-filtraci-signaliv-i-pristrijj-dlya-jjogo-zdijjsnennya.html" target="_blank" rel="follow" title="База патентів України">Спосіб адаптивної цифрової фільтрації сигналів і пристрій для його здійснення</a>
Спосіб перетворення сигналів і пристрій для його здійснення
Номер патенту: 25763
Опубліковано: 30.10.1998
Автор: Різник Володимир Васильович
МПК: H03M 7/02
Мітки: спосіб, пристрій, здійснення, сигналів, перетворення
Формула / Реферат:
1. Спосіб перетворення сигналів, який включає в себе підведення вхідних сигналів, вибір початкової комірки кільцевої структури, послідовний обхід комірок сигналом, вибір кінцевої комірки кільцевої структури, на якій закінчують обхід, формування вихідних сигналів з використанням ваг розрядів вихідного коду, який відрізняється тим, що формування вихідних сигналів здійснюють у відповідності з послідовно впорядкованими цілочисловими t-кортежами,...
Пазонний спосіб перетворення сигналів та пристрій для його здійснення
Номер патенту: 53536
Опубліковано: 15.01.2003
Автори: Бондаренко Михайло Федорович, Хом'яков Євгеній Вікторович, Чередніков Павло Ілліч, Сліпченко Миколай Іванович
МПК: H03B 19/00, H03K 3/53
Мітки: перетворення, спосіб, сигналів, пазонний, пристрій, здійснення
Формула / Реферат:
1. Пазонний спосіб перетворення сигналів, що включає параметричне порушення коливань у коливальній системі з перемінними енергоємними параметрами, глибину модуляції яких задають відповідно до величини енергії накачування, збільшення енергії накачування і здійснення інтегральної модуляції енергоємного параметра одного з елементів системи, зміну коефіцієнта інтегральної модуляції реактивності системи від нуля до одиниці, збільшення середньої...
Спосіб підсилення амплітудно-модульованих та фазоманіпульованих сигналів та пристрій для його здійснення
Номер патенту: 30592
Опубліковано: 15.01.2002
Автор: СИНЕЛЬНИК ОЛЕКСАНДР ІВАНОВИЧ
Мітки: підсилення, фазоманіпульованих, пристрій, амплітудно-модульованих, здійснення, сигналів, спосіб
Формула / Реферат:
1. Спосіб підсилення амплітудно-модульованих та фазоманіпульованих сигналів, здійснюваний в електричному колі, яке містить керований двополюсник повного імпедансу, залежність між вхідним діянням та вихідним сигналом близька до залежності між напругою та струмом у вказаному двополюснику, залежністю між напругою та струмом керують за допомогою сигналу керування, який містить частоту, що дорівнює подвійній несучій сигналу, фаза несучої сигналу...
Спосіб підсилення амплітудно-модульованих та фазо-маніпульованих сигналів та пристрій для його здійснення
Номер патенту: 30592
Опубліковано: 15.12.2000
Автор: СИНЕЛЬНИК ОЛЕКСАНДР ІВАНОВИЧ
Мітки: підсилення, амплітудно-модульованих, фазо-маніпульованих, сигналів, пристрій, здійснення, спосіб
Формула / Реферат:
1. Спосіб підсилення амплітудно-модульованих та фазоманіпульованих сигналів, здійснюваний в електричному колі, яке містить керований двополюсник повного імпедансу, залежність між вхідним діянням та вихідним сигналом близька до залежності між напругою та струмом у вказаному двополюснику, залежністю між напругою та струмом керують за допомогою сигналу керування, який містить частоту, що дорівнює подвійній несучій сигналу, фаза несучої сигналу...
Спосіб компенсації ехо-сигналів при дуплексному передаванні цифрових сигналів та пристрій для його здійснення
Номер патенту: 8026
Опубліковано: 26.12.1995
Автори: Геро Шольмайєр, Хайнріх Зайлер
МПК: H04B 3/20
Мітки: цифрових, передаванні, дуплексному, пристрій, ехо-сигналів, здійснення, компенсації, сигналів, спосіб
Формула / Реферат:
1. Способ компенсации эхо-сигналов при дуплексной передаче цифровых сигналов, заключающийся в том, что эхо-сигналы, вызванные цифровыми сигналами передачи, формируемыми передающим блоком передающей ветви дифференциальной системы, в приемном блоке приемной ветви дифференциальной системы вместе с принятыми через дифференциальную систему цифровыми сигналами приема образуют смесь сигналов, из которой вычитают сигналы компенсации,...
Попередній патент: Підсилювач потужності
Наступний патент: Стрічковий висівний апарат
Випадковий патент: Мікрохвильова інтегрована телерадіоінформаційна система "мітріс-м"