Синхронізація фемтостільників і методологія пошуку пілот-сигналу
Формула / Реферат
1. Спосіб задавання фаз пілот-сигналу фемтостільників, який включає етапи, на яких:
розділяють ![]() на множину зміщень фаз для макростільників;
на множину зміщень фаз для макростільників;
вставляють множину зміщень фаз для фемтостільників між зміщеннями фаз для макростільників, причому кожне зміщення фази для фемтостільника вставляється між двома сусідніми зміщеннями фаз для макростільника; і
створюють щонайменше те ж число зміщень фаз пілот-сигналів для фемтостільників, що і для макростільників.
2. Спосіб за п. 1, в якому етап створення щонайменше того ж числа зміщень фаз пілот-сигналів для фемтостільників, що і для макростільників, додатково містить зменшення значень параметра PILOT_INC зі збереженням зміщень фаз для макростільників при парних приростах мінімального фазового інтервалу і, таким чином, створення непарних приростів фазового інтервалу для зміщень PN фемтостільників.
3. Спосіб за п. 1, в якому параметр PILOT_INC використовується для керування розміром зміщень PN для фемтостільників, що відрізняються від зміщень фази PN для макростільників.
4. Спосіб за п. 1, в якому при низькій щільності фемтостільників підгрупа непарних зміщень PN може бути використана для фемтостільників і в явній формі включена в список сусідів.
5. Спосіб за п. 1, в якому при високій щільності фемтостільників нове користувацьке обладнання (UE), орієнтоване на фемтостільники, буде вводитися в дію і конфігуруватися для маніпулювання набором зміщень PN фемтостільників без їх явного включення в список сусідів.
6. Пристрій для задавання фаз пілот-сигналу фемтостільників, який містить:
засіб для розділення ![]() на множину зміщень фаз для макростільників;
на множину зміщень фаз для макростільників;
засіб для вставлення множини зміщень фаз для фемтостільників між зміщеннями фаз для макростільників, причому кожне зміщення фази для фемтостільника вставляється між двома сусідніми зміщеннями фаз для макростільника; і
засіб для створення щонайменше одного і того ж числа зміщень фаз пілот-сигналів для фемтостільників і для макростільників.
7. Пристрій за п. 6, в якому засіб для створення щонайменше одного і того ж числа зміщень фаз пілот-сигналів для фемтостільників і для макростільників містить
засіб для зменшення значення параметра PILOT_INC зі збереженням зміщень фаз для макростільників при парних приростах мінімального фазового інтервалу і, таким чином, створення непарних приростів фазового інтервалу для зміщень PN для фемтостільників.
8. Пристрій за п. 6, в якому параметр PILOT_INC використовується для керування розміром зміщень PN для фемтостільників.
9. Пристрій за п. 6, в якому при низькій щільності фемтостільників підгрупа непарних зміщень PN може бути використана для фемтостільників і в явній формі включена в список сусідів.
10. Пристрій за п. 6, в якому при високій щільності фемтостільників нове UE, орієнтоване на фемтостільники, буде вводитися в дію і конфігуруватися для маніпулювання набором зміщень PN фемтостільників без їх явного включення в список сусідів.
11. Пристрій для задавання фаз пілот-сигналів фемтостільників, який містить:
процесор для розділення ![]() на множину зміщень фаз для макростільників, для вставлення множини зміщень фаз для фемтостільників між зміщеннями фаз для макростільників, причому кожне зміщення фази для фемтостільника вставляється між двома сусідніми зміщеннями фаз для макростільників, і для створення щонайменше одного і того ж числа зміщень фаз пілот-сигналів для фемтостільників і для макростільників.
на множину зміщень фаз для макростільників, для вставлення множини зміщень фаз для фемтостільників між зміщеннями фаз для макростільників, причому кожне зміщення фази для фемтостільника вставляється між двома сусідніми зміщеннями фаз для макростільників, і для створення щонайменше одного і того ж числа зміщень фаз пілот-сигналів для фемтостільників і для макростільників.
12. Машиночитаний носій, який містить виконувані комп'ютером коди для спонукання комп'ютера здійснювати:
розділення ![]() на множину зміщень фаз для макростільників;
на множину зміщень фаз для макростільників;
вставлення множини зміщень фаз для фемтостільників між зміщеннями фаз для макростільників, причому кожне зміщення фази для фемтостільника вставляється між двома сусідніми зміщеннями фаз для макростільників; і
створення щонайменше одного і того ж числа зміщень фаз пілот-сигналів для фемтостільників і для макростільників.
13. Машиночитаний носій за п. 12, в якому коди для створення щонайменше одного і того ж числа фаз пілот-сигналів для фемтостільників і для макростільників додатково містять коди для забезпечення комп'ютером зменшення значення параметра PILOT_INC зі збереженням зміщень фаз для макростільників при парних приростах мінімального фазового інтервалу і, таким чином, створення непарних приростів фазового інтервалу для зміщень PN для фемтостільників.
14. Машиночитаний носій за п. 12, причому параметр PILOT_INC використовується для керування розміром зміщень PN для фемтостільників.
15. Машиночитаний носій за п. 12, причому при низькій щільності фемтостільників підгрупа непарних зміщень PN може бути використана для фемтостільників і в явній формі включена в список сусідів.
16. Машиночитаний носій за п. 12, причому при високій щільності фемтостільників нове UE, орієнтоване на фемтостільники, буде вводитися в дію і конфігуруватися для маніпулювання набором зміщень PN без їх явного включення в список сусідів.
Текст
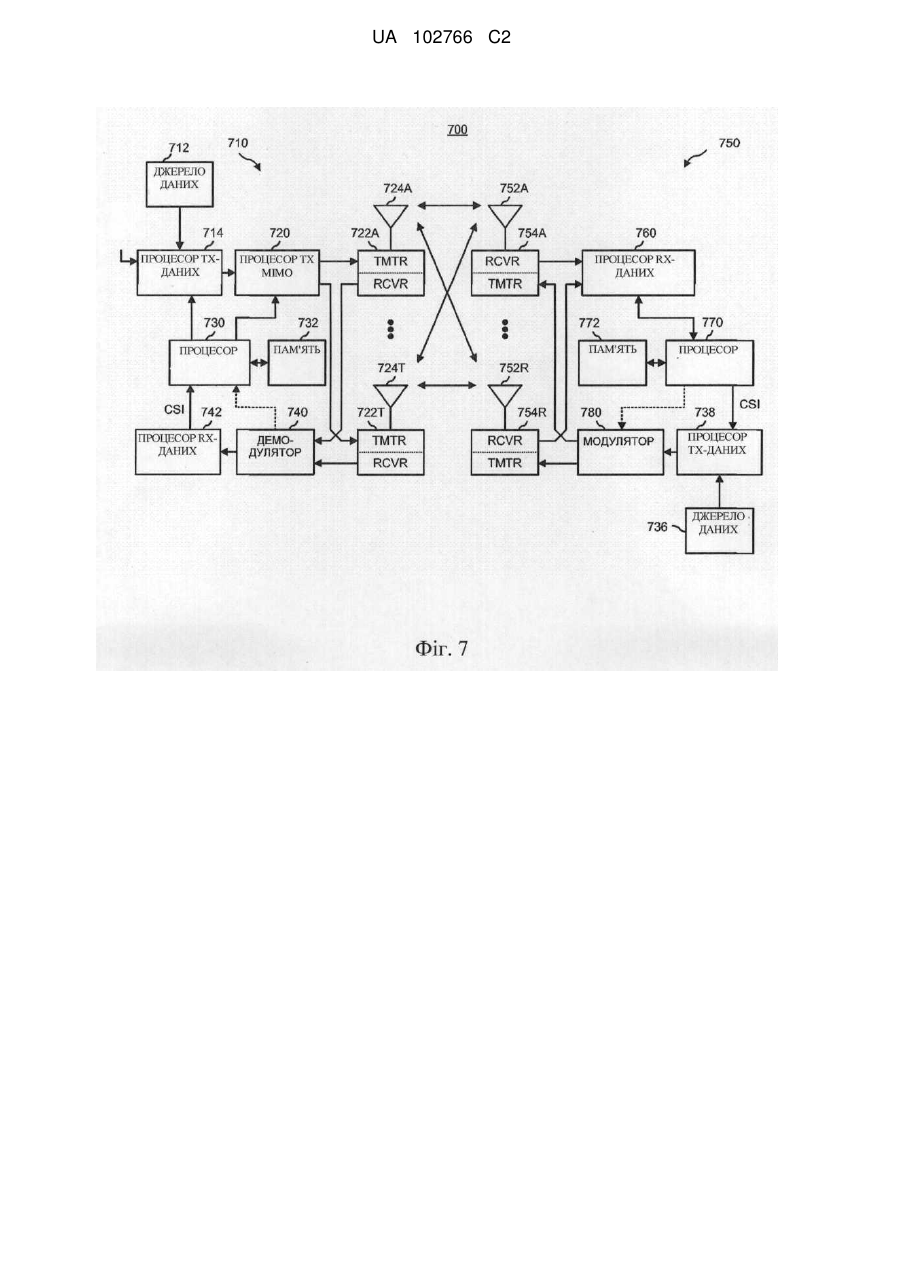
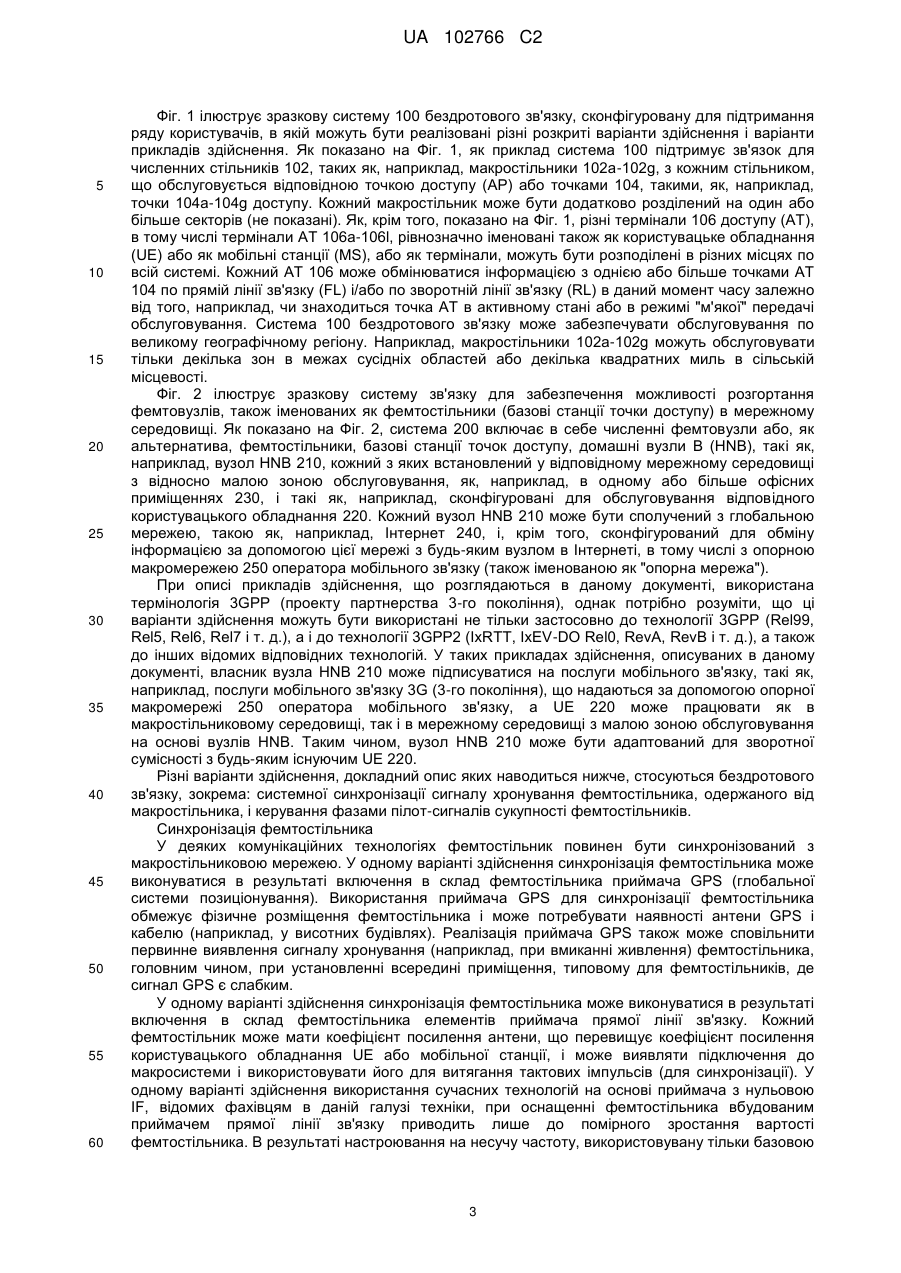
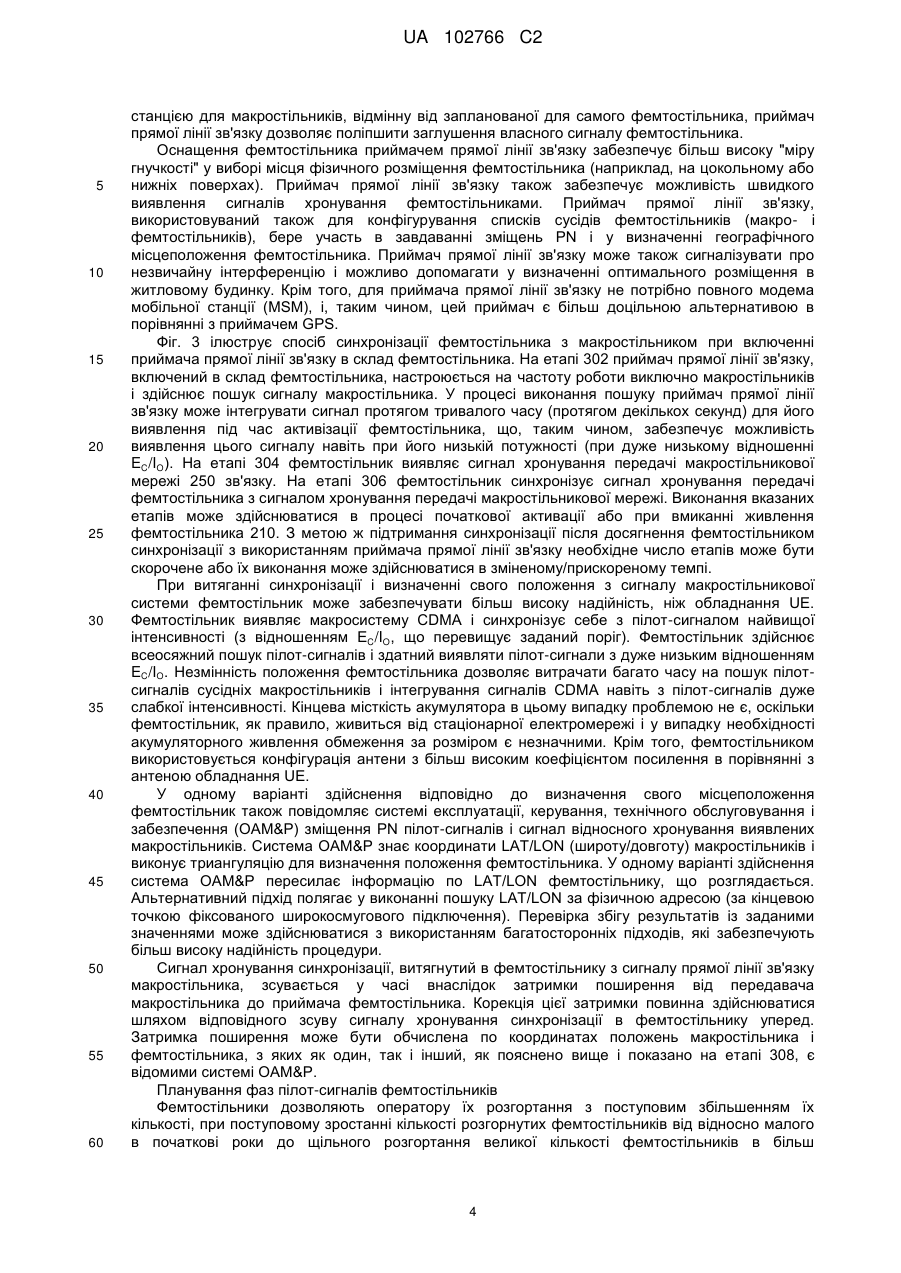
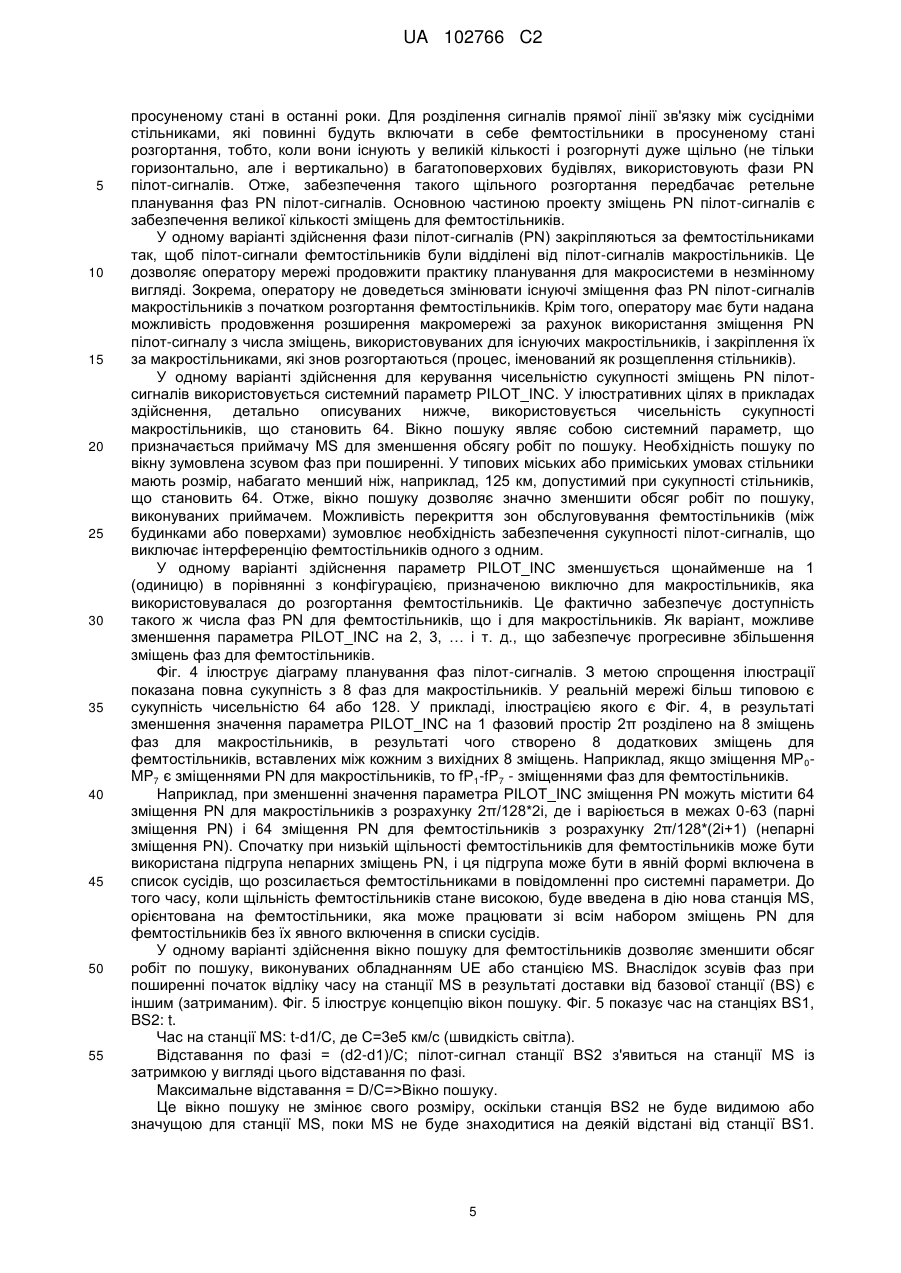
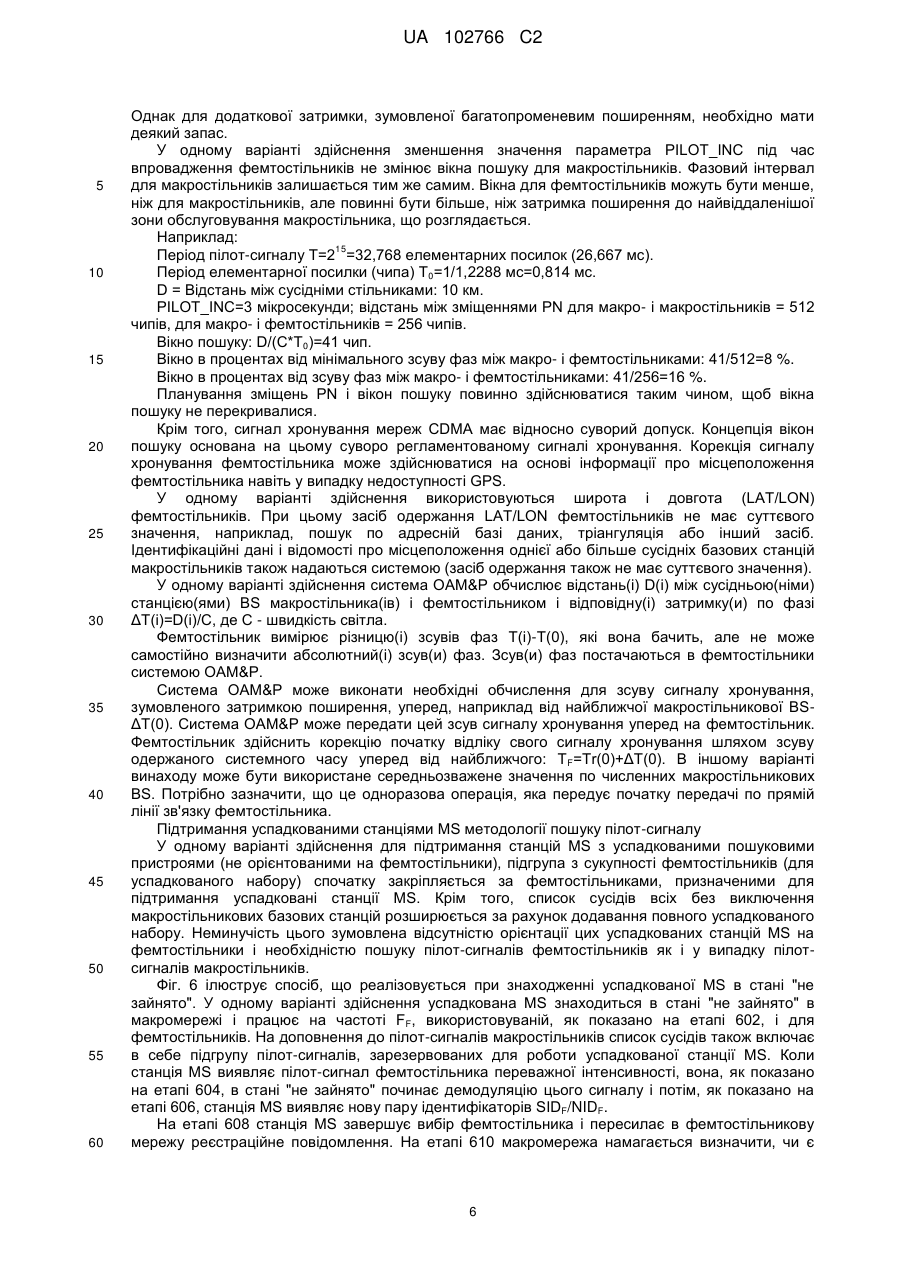
Реферат: Система, спосіб і комп'ютерний продукт для синхронізації фемтостільника з макростільником, причому спосіб включає етапи, на яких: розміщують приймач прямої лінії зв'язку в фемтостільнику; приймають мікростільниковою мережею сигнал хронування передачі фемтостільника і здійснюють синхронізацію сигналу хронування передачі фемтостільника з сигналом хронування передачі макростільникової мережі на основі сигналу приймача прямої лінії зв'язку. Крім того, система, спосіб і комп'ютерний продукт для призначення фаз пілотсигналів фемтостільникам, причому спосіб включає етапи, на яких: створюють щонайменше таке ж число нових потенційних фаз пілот-сигналу для фемтостільників як і для макростільників; і забезпечують для мобільного пристрою в макростільнику можливості пошуку і знаходження пілот-сигналу фемтостільника без внесення фаз пілот-сигналів фемтостільників в явній формі в список сусідів. UA 102766 C2 (12) UA 102766 C2 UA 102766 C2 5 10 15 20 25 30 35 40 45 50 55 60 По даній заявці на патент вимагається пріоритет по попередній заявці № 60/979797, озаглавленій "FEMTO CELL SYNCHRONIZATION AND PILOT SEARCH METHODOLOGY", поданій 12 жовтня 2007 р., яка переуступлена правонаступнику даної заявки і цим явно включена в даний документ за допомогою посилання. Галузь техніки, до якої належить винахід Дана заявка стосується, загалом, бездротового зв'язку, а зокрема способів і систем для забезпечення можливості синхронізації базових станцій точок доступу або фемтостільників і методів пошуку пілот-сигналу. Рівень техніки Системи бездротового зв'язку набули великого поширення в забезпеченні різних типів зв'язку (наприклад, передача мови, передача даних, надання мультимедійних послуг і т. д.) з численними користувачами. Потреба в послугах високошвидкісної передачі мультимедійних даних швидко зростає, що зумовлює необхідність вирішення складної задачі по реалізації ефективних і надійних систем зв'язку з поліпшеними робочими характеристиками. У останні роки користувачі приступили до заміни фіксованого дротового зв'язку на мобільний зв'язок, і це приводить до все більше зростаючої потреби користувачів у високій якості передачі мови, надійному обслуговуванні і низьких цінах. На доповнення до існуючих мобільних телефонних мереж з'явився новий клас невеликих базових станцій, які можуть бути встановлені в будинку користувача і можуть забезпечувати бездротове обслуговування всередині приміщення для мобільних телефонних апаратів з використанням існуючого широкосмугових Інтернет-підключення. Такі персональні мініатюрні базові станції в більшості випадків іменуються як базові станції точок доступу або, як альтернатива, як домашній вузол В (HNB) або фемтостільники. Як правило, такі мініатюрні базові станції підключені до Інтернету і до мережі оператора мобільного зв'язку через маршрутизатор цифрової абонентської лінії (DSL) або кабельний модем. Короткий опис креслень Фіг. 1 ілюструє зразкову систему бездротового зв'язку. Фіг. 2. ілюструє зразкову систему зв'язку для забезпечення можливості розгортання базових станцій точок доступу в мережному середовищі. Фіг. 3 ілюструє спосіб синхронізації фемтостільника з макростільником при розміщенні приймача прямої лінії зв'язку в фемтостільнику. Фіг. 4 ілюструє діаграму планування фаз пілот-сигналів. Фіг. 5 ілюструє концепцію вікон пошуку. Фіг. 6 ілюструє спосіб, що реалізовується при знаходженні успадкованої MS в стані "не зайнято". Фіг. 7 ілюструє спрощену блок-схему декількох типових варіантів компонентів системи зв'язку. Фіг. 8 ілюструє приклад блок-схеми системи 800 відповідно до додаткових варіантів, описуваних в даному документі. Здійснення винаходу Переважний варіант здійснення даного винаходу стосується способів і систем для забезпечення можливості синхронізації базових станцій точок доступу або фемтостільників і методів пошуку пілот-сигналу, які дозволяють практично усунути один або декілька недоліків існуючого рівня техніки. У одному аспекті переважного варіанта здійснення пропонуються система, спосіб і комп'ютерний продукт для синхронізації фемтостільника з макростільником, причому спосіб включає етапи, на яких: (a) приймають за допомогою фемтостільника сигнал хронування передачі макростільника; і (b) здійснюють синхронізацію сигналу хронування передачі фемтостільника з сигналом хронування передачі мікростільникової мережі при розгортанні фемтостільника на основі сигналу приймача прямої лінії зв'язку. Кожний фемтостільник може мати коефіцієнт посилення антени, який перевищує коефіцієнт посилення користувацького обладнання (UE або інакше іменованого як MS), і може виявляти макросистему навіть в умовах радіоприйому за відсутності UE. У одному варіанті здійснення використання сучасних технологій на основі приймача з нульовою проміжною частотою (IF), відомих фахівцям в даній галузі техніки, при оснащенні фемтостільника вбудованим приймачем прямої лінії зв'язку приводить лише до помірного зростання вартості фемтостільника. У інших аспектах переважного варіанта здійснення пропонуються система, спосіб і комп'ютерний продукт для задавання фаз пілот-сигналів фемтостільників, причому спосіб включає етапи, на яких: (a) розділяють фазовий простір 2π на множину зміщень фаз для макростільників; (b) вставляють множину зміщень фаз для фемтостільників між зміщеннями 1 UA 102766 C2 5 10 15 20 25 30 35 40 45 50 55 60 фаз для макростільників, причому кожне зміщення фази для фемтостільника вставляється між двома сусідніми зміщеннями фаз для макростільників, а фазовий інтервал регулюється в одному варіанті здійснення параметром, іменованим як PILOT_INC; і (с) створюють одне і те ж число прийнятних зміщень фаз для фемто- і макростільників. Спосіб створення одного і того ж числа прийнятних зміщень фаз для фемто- і макростільників додатково включає етапи, на яких: зменшують значення параметра PILOT_INC із збереженням зміщень фаз для макростільників при парних приростах мінімального фазового інтервалу і, таким чином, створюють непарні прирости фазового інтервалу для зміщень PN для фемтостільників. У одному варіанті здійснення параметр PILOT_INC зменшується на одиницю в порівнянні з конфігурацією, призначеною виключно для макростільників, яка використовувалася до розгортання фемтостільників. Це фактично забезпечує доступність такого ж числа фаз PN для фемтостільників, що і для макростільників. Додаткові ознаки і переваги винаходу будуть відображені в описі, що наводиться нижче, і частково стануть очевидними з цього опису або можуть бути вивчені при практичному використанні винаходу. Переваги винаходу будуть реалізовані і досягнуті за допомогою структури, розглянутої, зокрема, в письмовому описі і в формулі винаходу, а також з посиланнями на прикладені креслення. Потрібно розуміти, що і попередній загальний опис і представлений нижче докладний опис є ілюстративними, носять пояснювальний характер і призначені для додаткового пояснення заявленого винаходу. Здійснення винаходу Слово "зразковий" використовується в даному документі в значенні "слугує як приклад, варіант або ілюстрація". Будь-який варіант здійснення, що описується в даному документі як "зразковий", не обов'язково повинен розглядатися як переважний або переважний в порівнянні з іншими прикладами здійснення. Методи, що описуються в даному документі, можуть бути використані для різних мереж бездротового зв'язку, таких як мережі множинного доступу з кодовим розділенням (CDMA), мережі множинного доступу з часовим розділенням (TDMA), мережі множинного доступу з частотним розділенням (FDMA), мережі множинного доступу з ортогональним частотним розділенням (OFDMA), мережі множинного доступу з частотним розділенням на одній несучій (SC-FDMA) і т. д. Терміни "мережі" і "системи" звичайно використовуються як взаємозамінні. Мережа CDMA може реалізовувати радіотехнологію типу універсального наземного радіодоступу (UTRA), cdma2000 і т. д. UTRA включає в себе широкосмуговий CDMA (W-CDMA) і низьку частоту проходження елементарних посилок (LCR). Технологія cdma2000 обслуговує стандарти IS-2000, IS-95 і IS-856. Мережа TDMA може реалізовувати радіотехнологію типу глобальної системи для мобільних комунікацій (GSM). Мережа OFDMA може реалізовувати радіотехнологію типу еволюціонованого UTRA (E-UTRA), IEEE 802.11, IEEE 802.16, IEEE 802.20, Flash-OFDM® і т. д. UTRA, E-UTRA і GSM є частиною універсальної системи мобільних телекомунікацій (UMTS). Радіотехнологія довгострокової еволюції (LTE) являє собою перспективну версію UMTS, що використовує E-UTRA. Опис UTRA, E-UTRA, GSM, UMTS і LTE наводиться в документах, що видаються організацією, іменованою "Партнерський проект третього покоління" (3GPP). Технологія cdma2000 описується в документах, що видаються організацією, іменованою "Другий партнерський проект третього покоління" (3GPP2). Ці різні радіотехнології і стандарти відомі фахівцям в даній галузі техніки. У описі, що наводиться в даному документі, вузол, який забезпечує обслуговування відносно великої зони, може іменуватися як макровузол, а вузол, який забезпечує обслуговування відносно малої зони (наприклад, місця проживання), може іменуватися як фемтовузол. Потрібно враховувати, що ідеї, які викладаються в даному документі, можуть бути використані і застосовно до вузлів, які стосуються зон обслуговування інших типів. Наприклад, піковузол може забезпечувати обслуговування зони, розміри якої менше, ніж у макрозони, і більше, ніж у фемтозони (наприклад, обслуговування всередині адміністративної будівлі). У різних додатках для посилань на макровузол, фемтовузол або інші вузли типу точок доступу може бути використана інша термінологія. Наприклад, макровузол може бути сконфігурований або іменуватися як вузол доступу, базова станція, точка доступу, еволюціонований вузол В, макростільник і т. д. Крім того, фемтовузол може бути сконфігурований або іменуватися як домашній вузол В (Node B), еволюціонований вузол В (eNode B), базова станція точки доступу, фемтостільник і т. д. В деяких прикладах реалізації вузол може стосуватися (наприклад, в результаті розділення) одного або більше стільників або секторів. Стільник або сектор, що стосується макровузла, фемтовузла або піковузла, може іменуватися відповідно макростільником, фемтостільником або пікостільником. Далі з посиланнями на Фіг. 1 і 2 наводиться опис спрощеного прикладу способу можливого розгортання фемтовузлів в мережі. 2 UA 102766 C2 5 10 15 20 25 30 35 40 45 50 55 60 Фіг. 1 ілюструє зразкову систему 100 бездротового зв'язку, сконфігуровану для підтримання ряду користувачів, в якій можуть бути реалізовані різні розкриті варіанти здійснення і варіанти прикладів здійснення. Як показано на Фіг. 1, як приклад система 100 підтримує зв'язок для численних стільників 102, таких як, наприклад, макростільники 102a-102g, з кожним стільником, що обслуговується відповідною точкою доступу (AP) або точками 104, такими, як, наприклад, точки 104a-104g доступу. Кожний макростільник може бути додатково розділений на один або більше секторів (не показані). Як, крім того, показано на Фіг. 1, різні термінали 106 доступу (AT), в тому числі термінали AT 106a-106l, рівнозначно іменовані також як користувацьке обладнання (UE) або як мобільні станції (MS), або як термінали, можуть бути розподілені в різних місцях по всій системі. Кожний AT 106 може обмінюватися інформацією з однією або більше точками AT 104 по прямій лінії зв'язку (FL) і/або по зворотній лінії зв'язку (RL) в даний момент часу залежно від того, наприклад, чи знаходиться точка AT в активному стані або в режимі "м'якої" передачі обслуговування. Система 100 бездротового зв'язку може забезпечувати обслуговування по великому географічному регіону. Наприклад, макростільники 102a-102g можуть обслуговувати тільки декілька зон в межах сусідніх областей або декілька квадратних миль в сільській місцевості. Фіг. 2 ілюструє зразкову систему зв'язку для забезпечення можливості розгортання фемтовузлів, також іменованих як фемтостільники (базові станції точки доступу) в мережному середовищі. Як показано на Фіг. 2, система 200 включає в себе численні фемтовузли або, як альтернатива, фемтостільники, базові станції точок доступу, домашні вузли В (HNB), такі як, наприклад, вузол HNB 210, кожний з яких встановлений у відповідному мережному середовищі з відносно малою зоною обслуговування, як, наприклад, в одному або більше офісних приміщеннях 230, і такі як, наприклад, сконфігуровані для обслуговування відповідного користувацького обладнання 220. Кожний вузол HNB 210 може бути сполучений з глобальною мережею, такою як, наприклад, Інтернет 240, і, крім того, сконфігурований для обміну інформацією за допомогою цієї мережі з будь-яким вузлом в Інтернеті, в тому числі з опорною макромережею 250 оператора мобільного зв'язку (також іменованою як "опорна мережа"). При описі прикладів здійснення, що розглядаються в даному документі, використана термінологія 3GPP (проекту партнерства 3-го покоління), однак потрібно розуміти, що ці варіанти здійснення можуть бути використані не тільки застосовно до технології 3GPP (Rel99, Rel5, Rel6, Rel7 і т. д.), а і до технології 3GPP2 (IxRTT, IxEV-DO Rel0, RevA, RevB і т. д.), а також до інших відомих відповідних технологій. У таких прикладах здійснення, описуваних в даному документі, власник вузла HNB 210 може підписуватися на послуги мобільного зв'язку, такі як, наприклад, послуги мобільного зв'язку 3G (3-го покоління), що надаються за допомогою опорної макромережі 250 оператора мобільного зв'язку, а UE 220 може працювати як в макростільниковому середовищі, так і в мережному середовищі з малою зоною обслуговування на основі вузлів HNB. Таким чином, вузол HNB 210 може бути адаптований для зворотної сумісності з будь-яким існуючим UE 220. Різні варіанти здійснення, докладний опис яких наводиться нижче, стосуються бездротового зв'язку, зокрема: системної синхронізації сигналу хронування фемтостільника, одержаного від макростільника, і керування фазами пілот-сигналів сукупності фемтостільників. Синхронізація фемтостільника У деяких комунікаційних технологіях фемтостільник повинен бути синхронізований з макростільниковою мережею. У одному варіанті здійснення синхронізація фемтостільника може виконуватися в результаті включення в склад фемтостільника приймача GPS (глобальної системи позиціонування). Використання приймача GPS для синхронізації фемтостільника обмежує фізичне розміщення фемтостільника і може потребувати наявності антени GPS і кабелю (наприклад, у висотних будівлях). Реалізація приймача GPS також може сповільнити первинне виявлення сигналу хронування (наприклад, при вмиканні живлення) фемтостільника, головним чином, при установленні всередині приміщення, типовому для фемтостільників, де сигнал GPS є слабким. У одному варіанті здійснення синхронізація фемтостільника може виконуватися в результаті включення в склад фемтостільника елементів приймача прямої лінії зв'язку. Кожний фемтостільник може мати коефіцієнт посилення антени, що перевищує коефіцієнт посилення користувацького обладнання UE або мобільної станції, і може виявляти підключення до макросистеми і використовувати його для витягання тактових імпульсів (для синхронізації). У одному варіанті здійснення використання сучасних технологій на основі приймача з нульовою IF, відомих фахівцям в даній галузі техніки, при оснащенні фемтостільника вбудованим приймачем прямої лінії зв'язку приводить лише до помірного зростання вартості фемтостільника. В результаті настроювання на несучу частоту, використовувану тільки базовою 3 UA 102766 C2 5 10 15 20 25 30 35 40 45 50 55 60 станцією для макростільників, відмінну від запланованої для самого фемтостільника, приймач прямої лінії зв'язку дозволяє поліпшити заглушення власного сигналу фемтостільника. Оснащення фемтостільника приймачем прямої лінії зв'язку забезпечує більш високу "міру гнучкості" у виборі місця фізичного розміщення фемтостільника (наприклад, на цокольному або нижніх поверхах). Приймач прямої лінії зв'язку також забезпечує можливість швидкого виявлення сигналів хронування фемтостільниками. Приймач прямої лінії зв'язку, використовуваний також для конфігурування списків сусідів фемтостільників (макро- і фемтостільників), бере участь в завдаванні зміщень PN і у визначенні географічного місцеположення фемтостільника. Приймач прямої лінії зв'язку може також сигналізувати про незвичайну інтерференцію і можливо допомагати у визначенні оптимального розміщення в житловому будинку. Крім того, для приймача прямої лінії зв'язку не потрібно повного модема мобільної станції (MSM), і, таким чином, цей приймач є більш доцільною альтернативою в порівнянні з приймачем GPS. Фіг. 3 ілюструє спосіб синхронізації фемтостільника з макростільником при включенні приймача прямої лінії зв'язку в склад фемтостільника. На етапі 302 приймач прямої лінії зв'язку, включений в склад фемтостільника, настроюється на частоту роботи виключно макростільників і здійснює пошук сигналу макростільника. У процесі виконання пошуку приймач прямої лінії зв'язку може інтегрувати сигнал протягом тривалого часу (протягом декількох секунд) для його виявлення під час активізації фемтостільника, що, таким чином, забезпечує можливість виявлення цього сигналу навіть при його низькій потужності (при дуже низькому відношенні EC/IO). На етапі 304 фемтостільник виявляє сигнал хронування передачі макростільникової мережі 250 зв'язку. На етапі 306 фемтостільник синхронізує сигнал хронування передачі фемтостільника з сигналом хронування передачі макростільникової мережі. Виконання вказаних етапів може здійснюватися в процесі початкової активації або при вмиканні живлення фемтостільника 210. З метою ж підтримання синхронізації після досягнення фемтостільником синхронізації з використанням приймача прямої лінії зв'язку необхідне число етапів може бути скорочене або їх виконання може здійснюватися в зміненому/прискореному темпі. При витяганні синхронізації і визначенні свого положення з сигналу макростільникової системи фемтостільник може забезпечувати більш високу надійність, ніж обладнання UE. Фемтостільник виявляє макросистему CDMA і синхронізує себе з пілот-сигналом найвищої інтенсивності (з відношенням EC/IO, що перевищує заданий поріг). Фемтостільник здійснює всеосяжний пошук пілот-сигналів і здатний виявляти пілот-сигнали з дуже низьким відношенням EC/IO. Незмінність положення фемтостільника дозволяє витрачати багато часу на пошук пілотсигналів сусідніх макростільників і інтегрування сигналів CDMA навіть з пілот-сигналів дуже слабкої інтенсивності. Кінцева місткість акумулятора в цьому випадку проблемою не є, оскільки фемтостільник, як правило, живиться від стаціонарної електромережі і у випадку необхідності акумуляторного живлення обмеження за розміром є незначними. Крім того, фемтостільником використовується конфігурація антени з більш високим коефіцієнтом посилення в порівнянні з антеною обладнання UE. У одному варіанті здійснення відповідно до визначення свого місцеположення фемтостільник також повідомляє системі експлуатації, керування, технічного обслуговування і забезпечення (OAM&Р) зміщення PN пілот-сигналів і сигнал відносного хронування виявлених макростільників. Система OAM&Р знає координати LAT/LON (широту/довготу) макростільників і виконує триангуляцію для визначення положення фемтостільника. У одному варіанті здійснення система OAM&Р пересилає інформацію по LAT/LON фемтостільнику, що розглядається. Альтернативний підхід полягає у виконанні пошуку LAT/LON за фізичною адресою (за кінцевою точкою фіксованого широкосмугового підключення). Перевірка збігу результатів із заданими значеннями може здійснюватися з використанням багатосторонніх підходів, які забезпечують більш високу надійність процедури. Сигнал хронування синхронізації, витягнутий в фемтостільнику з сигналу прямої лінії зв'язку макростільника, зсувається у часі внаслідок затримки поширення від передавача макростільника до приймача фемтостільника. Корекція цієї затримки повинна здійснюватися шляхом відповідного зсуву сигналу хронування синхронізації в фемтостільнику уперед. Затримка поширення може бути обчислена по координатах положень макростільника і фемтостільника, з яких як один, так і інший, як пояснено вище і показано на етапі 308, є відомими системі OAM&Р. Планування фаз пілот-сигналів фемтостільників Фемтостільники дозволяють оператору їх розгортання з поступовим збільшенням їх кількості, при поступовому зростанні кількості розгорнутих фемтостільників від відносно малого в початкові роки до щільного розгортання великої кількості фемтостільників в більш 4 UA 102766 C2 5 10 15 20 25 30 35 40 45 50 55 просуненому стані в останні роки. Для розділення сигналів прямої лінії зв'язку між сусідніми стільниками, які повинні будуть включати в себе фемтостільники в просуненому стані розгортання, тобто, коли вони існують у великій кількості і розгорнуті дуже щільно (не тільки горизонтально, але і вертикально) в багатоповерхових будівлях, використовують фази PN пілот-сигналів. Отже, забезпечення такого щільного розгортання передбачає ретельне планування фаз PN пілот-сигналів. Основною частиною проекту зміщень PN пілот-сигналів є забезпечення великої кількості зміщень для фемтостільників. У одному варіанті здійснення фази пілот-сигналів (PN) закріпляються за фемтостільниками так, щоб пілот-сигнали фемтостільників були відділені від пілот-сигналів макростільників. Це дозволяє оператору мережі продовжити практику планування для макросистеми в незмінному вигляді. Зокрема, оператору не доведеться змінювати існуючі зміщення фаз PN пілот-сигналів макростільників з початком розгортання фемтостільників. Крім того, оператору має бути надана можливість продовження розширення макромережі за рахунок використання зміщення PN пілот-сигналу з числа зміщень, використовуваних для існуючих макростільників, і закріплення їх за макростільниками, які знов розгортаються (процес, іменований як розщеплення стільників). У одному варіанті здійснення для керування чисельністю сукупності зміщень PN пілотсигналів використовується системний параметр PILOT_INC. У ілюстративних цілях в прикладах здійснення, детально описуваних нижче, використовується чисельність сукупності макростільників, що становить 64. Вікно пошуку являє собою системний параметр, що призначається приймачу MS для зменшення обсягу робіт по пошуку. Необхідність пошуку по вікну зумовлена зсувом фаз при поширенні. У типових міських або приміських умовах стільники мають розмір, набагато менший ніж, наприклад, 125 км, допустимий при сукупності стільників, що становить 64. Отже, вікно пошуку дозволяє значно зменшити обсяг робіт по пошуку, виконуваних приймачем. Можливість перекриття зон обслуговування фемтостільників (між будинками або поверхами) зумовлює необхідність забезпечення сукупності пілот-сигналів, що виключає інтерференцію фемтостільників одного з одним. У одному варіанті здійснення параметр PILOT_INC зменшується щонайменше на 1 (одиницю) в порівнянні з конфігурацією, призначеною виключно для макростільників, яка використовувалася до розгортання фемтостільників. Це фактично забезпечує доступність такого ж числа фаз PN для фемтостільників, що і для макростільників. Як варіант, можливе зменшення параметра PILOT_INC на 2, 3, … і т. д., що забезпечує прогресивне збільшення зміщень фаз для фемтостільників. Фіг. 4 ілюструє діаграму планування фаз пілот-сигналів. З метою спрощення ілюстрації показана повна сукупність з 8 фаз для макростільників. У реальній мережі більш типовою є сукупність чисельністю 64 або 128. У прикладі, ілюстрацією якого є Фіг. 4, в результаті зменшення значення параметра PILOT_INC на 1 фазовий простір 2π розділено на 8 зміщень фаз для макростільників, в результаті чого створено 8 додаткових зміщень для фемтостільників, вставлених між кожним з вихідних 8 зміщень. Наприклад, якщо зміщення MP 0MP7 є зміщеннями PN для макростільників, то fP1-fP7 - зміщеннями фаз для фемтостільників. Наприклад, при зменшенні значення параметра PILOT_INC зміщення PN можуть містити 64 зміщення PN для макростільників з розрахунку 2π/128*2i, де i варіюється в межах 0-63 (парні зміщення PN) і 64 зміщення PN для фемтостільників з розрахунку 2π/128*(2i+1) (непарні зміщення PN). Спочатку при низькій щільності фемтостільників для фемтостільників може бути використана підгрупа непарних зміщень PN, і ця підгрупа може бути в явній формі включена в список сусідів, що розсилається фемтостільниками в повідомленні про системні параметри. До того часу, коли щільність фемтостільників стане високою, буде введена в дію нова станція MS, орієнтована на фемтостільники, яка може працювати зі всім набором зміщень PN для фемтостільників без їх явного включення в списки сусідів. У одному варіанті здійснення вікно пошуку для фемтостільників дозволяє зменшити обсяг робіт по пошуку, виконуваних обладнанням UE або станцією MS. Внаслідок зсувів фаз при поширенні початок відліку часу на станції MS в результаті доставки від базової станції (BS) є іншим (затриманим). Фіг. 5 ілюструє концепцію вікон пошуку. Фіг. 5 показує час на станціях BS1, BS2: t. Час на станції MS: t-d1/С, де С=3e5 км/с (швидкість світла). Відставання по фазі = (d2-d1)/С; пілот-сигнал станції BS2 з'явиться на станції MS із затримкою у вигляді цього відставання по фазі. Максимальне відставання = D/С=>Вікно пошуку. Це вікно пошуку не змінює свого розміру, оскільки станція BS2 не буде видимою або значущою для станції MS, поки MS не буде знаходитися на деякій відстані від станції BS1. 5 UA 102766 C2 5 10 15 20 25 30 35 40 45 50 55 60 Однак для додаткової затримки, зумовленої багатопроменевим поширенням, необхідно мати деякий запас. У одному варіанті здійснення зменшення значення параметра PILOT_INC під час впровадження фемтостільників не змінює вікна пошуку для макростільників. Фазовий інтервал для макростільників залишається тим же самим. Вікна для фемтостільників можуть бути менше, ніж для макростільників, але повинні бути більше, ніж затримка поширення до найвіддаленішої зони обслуговування макростільника, що розглядається. Наприклад: 15 Період пілот-сигналу Т=2 =32,768 елементарних посилок (26,667 мс). Період елементарної посилки (чипа) T 0=1/1,2288 мс=0,814 мс. D = Відстань між сусідніми стільниками: 10 км. PILOT_INC=3 мікросекунди; відстань між зміщеннями PN для макро- і макростільників = 512 чипів, для макро- і фемтостільників = 256 чипів. Вікно пошуку: D/(С*T0)=41 чип. Вікно в процентах від мінімального зсуву фаз між макро- і фемтостільниками: 41/512=8 %. Вікно в процентах від зсуву фаз між макро- і фемтостільниками: 41/256=16 %. Планування зміщень PN і вікон пошуку повинно здійснюватися таким чином, щоб вікна пошуку не перекривалися. Крім того, сигнал хронування мереж CDMA має відносно суворий допуск. Концепція вікон пошуку основана на цьому суворо регламентованому сигналі хронування. Корекція сигналу хронування фемтостільника може здійснюватися на основі інформації про місцеположення фемтостільника навіть у випадку недоступності GPS. У одному варіанті здійснення використовуються широта і довгота (LAT/LON) фемтостільників. При цьому засіб одержання LAT/LON фемтостільників не має суттєвого значення, наприклад, пошук по адресній базі даних, тріангуляція або інший засіб. Ідентифікаційні дані і відомості про місцеположення однієї або більше сусідніх базових станцій макростільників також надаються системою (засіб одержання також не має суттєвого значення). У одному варіанті здійснення система OAM&Р обчислює відстань(і) D(i) між сусідньою(німи) станцією(ями) BS макростільника(ів) і фемтостільником і відповідну(і) затримку(и) по фазі ΔТ(i)=D(i)/С, де С - швидкість світла. Фемтостільник вимірює різницю(і) зсувів фаз Т(i)-Т(0), які вона бачить, але не може самостійно визначити абсолютний(і) зсув(и) фаз. Зсув(и) фаз постачаються в фемтостільники системою OAM&Р. Система OAM&Р може виконати необхідні обчислення для зсуву сигналу хронування, зумовленого затримкою поширення, уперед, наприклад від найближчої макростільникової BSΔТ(0). Система OAM&Р може передати цей зсув сигналу хронування уперед на фемтостільник. Фемтостільник здійснить корекцію початку відліку свого сигналу хронування шляхом зсуву одержаного системного часу уперед від найближчого: T F=Tr(0)+ΔТ(0). В іншому варіанті винаходу може бути використане середньозважене значення по численних макростільникових BS. Потрібно зазначити, що це одноразова операція, яка передує початку передачі по прямій лінії зв'язку фемтостільника. Підтримання успадкованими станціями MS методології пошуку пілот-сигналу У одному варіанті здійснення для підтримання станцій MS з успадкованими пошуковими пристроями (не орієнтованими на фемтостільники), підгрупа з сукупності фемтостільників (для успадкованого набору) спочатку закріпляється за фемтостільниками, призначеними для підтримання успадковані станції MS. Крім того, список сусідів всіх без виключення макростільникових базових станцій розширюється за рахунок додавання повного успадкованого набору. Неминучість цього зумовлена відсутністю орієнтації цих успадкованих станцій MS на фемтостільники і необхідністю пошуку пілот-сигналів фемтостільників як і у випадку пілотсигналів макростільників. Фіг. 6 ілюструє спосіб, що реалізовується при знаходженні успадкованої MS в стані "не зайнято". У одному варіанті здійснення успадкована MS знаходиться в стані "не зайнято" в макромережі і працює на частоті FF, використовуваній, як показано на етапі 602, і для фемтостільників. На доповнення до пілот-сигналів макростільників список сусідів також включає в себе підгрупу пілот-сигналів, зарезервованих для роботи успадкованої станції MS. Коли станція MS виявляє пілот-сигнал фемтостільника переважної інтенсивності, вона, як показано на етапі 604, в стані "не зайнято" починає демодуляцію цього сигналу і потім, як показано на етапі 606, станція MS виявляє нову пару ідентифікаторів SIDF/NIDF. На етапі 608 станція MS завершує вибір фемтостільника і пересилає в фемтостільникову мережу реєстраційне повідомлення. На етапі 610 макромережа намагається визначити, чи є 6 UA 102766 C2 5 10 15 20 25 30 35 40 45 50 55 станція MS авторизованим користувачем. Як показано на етапі 612, авторизована станція MS буде зареєстрована і одержить обслуговування. Потрібно враховувати, що ідеї, які викладаються в даному документі, можуть бути реалізовані в різних типах пристроїв зв'язку. У деяких варіантах ідеї, які викладаються в даному документі, можуть бути реалізовані в бездротових пристроях, які можуть бути розгорнуті в системі зв'язку з множинним доступом, яка може одночасно підтримувати зв'язок для численних терміналів бездротового доступу. При цьому кожний термінал може обмінюватися інформацією з однією або більше точками доступу за допомогою передач по прямій і зворотній лініях зв'язку. Пряма лінія зв'язку (або низхідна лінія зв'язку) - це лінія зв'язку в напрямі від точок доступу до терміналів, а зворотна лінія зв'язку (або висхідна лінія зв'язку) - це лінія зв'язку в напрямі від терміналів до точок доступу. Ця лінія зв'язку може бути організована за допомогою системи з одиночним прийомом - одиночною передачею, системи з множинними входами і множинними виходами (MIMO) або якого-небудь іншого типу системи. Система MIMO використовує для передачі даних декілька (N T) передавальних антен і декілька (NR) приймальних антен. Канал MIMO, сформований NT передавальними і NR приймальними антенами, може бути розділений на NS незалежних каналів, які також іменуються як просторові канали, де NS≤min{NT, NR}. Кожний з NS незалежних каналів відповідає розмірності. У випадку використання додаткових розмірностей, створюваних декількома передавальними і приймальними антенами, система MIMO може забезпечувати поліпшені робочі характеристики (наприклад, високу пропускну здатність і/або більшу надійність). Система MIMO може підтримувати дуплексний зв'язок з часовим розділенням (TDD) і дуплексний зв'язок з частотним розділенням (FDD). У системі TDD передачі по прямій і зворотній лініях зв'язку здійснюються в одній і тій же частотній області так, що принцип взаємності дозволяє проводити оцінку каналу прямої лінії зв'язку по каналу зворотної лінії зв'язку. У випадку доступності декількох антен в точці доступу це забезпечує можливість витягання коефіцієнта посилення при формуванні діаграми спрямованості в режимі передачі по прямій лінії зв'язку в точці доступу. Ідеї, які викладаються в даному документі, можуть бути впроваджені у вузол (наприклад, пристрій), що використовує різні компоненти для обміну інформацією щонайменше з одним іншим вузлом. Фіг. 7 ілюструє декілька компонентів, які можуть бути використані для полегшення зв'язку між вузлами. Зокрема, Фіг. 7 ілюструє бездротовий пристрій 710 (наприклад, точку доступу) і бездротовий пристрій 750 (наприклад, термінал доступу) системи MIMO 700. У пристрої 710 дані трафіку для ряду потоків даних постачаються з джерела 712 даних в процесор 714 даних передачі (TX). У деяких варіантах кожний потік даних передається по відповідній передавальній антені. Процесор 714 ТХ-даних форматує, кодує і перемежовує дані трафіку для кожного потоку даних на основі конкретної системи кодування, вибраної для цього потоку даних, з метою одержання кодованих даних. Кодовані дані для кожного потоку даних можуть бути мультиплексовані з даними пілотсигналу з використанням методів OFDM. Дані пілот-сигналу - це, як правило, відома комбінація даних, піддана обробці відомим способом, яка може бути використана в системі приймача для оцінки характеристики каналу. Потім мультиплексовані пілот-сигнал і кодовані дані для кожного потоку даних піддаються модуляції (тобто перетворюються в символи) на основі конкретної системи модуляції (наприклад, BPSK (ДФМ), QSPK (КФМ), M-PSK (МФМ) або M-QAM (М-КАМ)), вибраної для цього потоку даних, з метою формування модуляційних символів. Швидкість передачі даних, кодування і модуляція для кожного потоку даних можуть визначатися інструкціями, виконуваними процесором 730. Пам'ять 732 даних може зберігати програмний код, дані і іншу інформацію, використовувану процесором 730 або іншими компонентами пристрою 710. Потім модуляційні символи для всіх потоків даних надходять в процесор TX MIMO 720, який може виконувати додаткову обробку модуляційних символів (наприклад, для OFDM). При цьому процесор TX MIMO 720 передає NT потоків модуляційних символів в NT приймачів-передавачів (XCVR) 722A-722T. У деяких варіантах процесор TX MIMO 720 застосовує вагові функції формування діаграми спрямованості до символів потоків даних і до антени, по якій символ передається. Кожний приймач-передавач 722 приймає і обробляє відповідний потік символів для одержання одного або більше аналогових сигналів і, крім того, кондиціонує (наприклад, посилює, фільтрує і перетворює з підвищенням частоти) ці аналогові сигнали для одержання модульованого сигналу, що відповідає вимогам передачі по каналу MIMO. Потім здійснюється 7 UA 102766 C2 5 10 15 20 25 30 35 40 45 50 55 передача NT модульованих сигналів від приймачів-передавачів 722A-722T по відповідних NT антенах 724A-724T. У пристрої 750 здійснюється прийом переданих модульованих сигналів NR антенами 752A752R і прийнятий сигнал від кожної антени 752 надходить у відповідний приймач-передавач (XCVR) 754A-754R. Кожний приймач-передавач 754 кондиціонує (наприклад, фільтрує, посилює і перетворює з пониженням частоти) відповідний прийнятий сигнал, оцифровує кондиціонований сигнал для одержання дискретних значень і піддає подальшій обробці для одержання відповідного "прийнятого" потоку символів. При цьому процесор 760 даних прийому (RX) приймає і обробляє N R прийнятих потоків символів від приймачів-передавачів 754 на основі методу обробки для конкретного приймача з метою одержання NT "виявлених" потоків символів. Потім процесор 760 RX-даних демодулює, деперемежовує і декодує кожний виявлений потік символів з метою відновлення даних трафіку для потоку даних. Обробка, що виконується процесором 760 RX-даних, є комплементарною відносно обробки, виконуваної процесором TX MIMO 720 і процесором 714 ТХ-даних в пристрої 710. Процесор 770 періодично визначає, яку матрицю передкодування використовувати (розглядається нижче). Процесор 770 складає повідомлення для передачі по зворотній лінії зв'язку, яке містить частину з індексами і частину зі значенням рангу матриці. Пам'ять 772 даних може зберігати програмний код, дані і іншу інформацію, використовувану процесором 770 або іншими компонентами пристрою 750. Повідомлення для передачі по зворотній лінії зв'язку може містити різні типи інформації відносно лінії зв'язку і/або потоку прийнятих даних. Повідомлення для передачі по зворотній лінії зв'язку обробляється процесором 738 ТХ-даних, який також приймає дані трафіку для ряду потоків даних від джерела 736 даних, які модулюються модулятором 780, кондиціонуються приймачами-передавачами 754A-754R і передаються назад в пристрій 710. У пристрої 710 модульовані сигнали від пристрою 750 приймаються антенами 724, кондиціонуються приймачами-передавачами 722, демодулюються демодулятором (DEMOD) 740 і обробляються процесором 742 RX-даних для витягання повідомлення для передачі по зворотній лінії зв'язку, переданого пристроєм 750. При цьому процесор 730 визначає, яку матрицю передкодування використовувати для визначення вагових функцій формування діаграми спрямованості, і потім обробляє витягнуте повідомлення. Ідеї, що викладаються в даному документі, можуть бути впроваджені в різні типи систем зв'язку і/або системних компонентів. У деяких варіантах ідеї, що викладаються в даному документі, можуть бути застосовані в системі множинного доступу, здатній підтримувати зв'язок з численними користувачами в результаті розділення доступних системних ресурсів (наприклад, в результаті задавання одного або більше з: ширина смуги, потужності передачі, кодування, перемежовування і т. д.). Наприклад, ідеї, що викладаються в даному документі, можуть бути використані застосовно до будь-якої однієї з наступних технологій або їх комбінацій: до систем множинного доступу з кодовим розділенням каналів (CDMA), до систем CDMA з множинною несучою (MCCDMA), до систем широкосмугового CDMA (W-CDMA), до високошвидкісних систем пакетного доступу (HSPA, HSPA+), до систем множинного доступу з часовим розділенням каналів (TDMA), до систем множинного доступу з частотним розділенням каналів (FDMA), до систем FDMA на одній несучій (SC-FDMA), до систем множинного доступу з ортогональним частотним розділенням каналів (OFDMA) або до інших систем множинного доступу. Система бездротового зв'язку, що використовує ідеї, які викладаються в даному документі, може бути спроектована для реалізації одного або більше стандартів, таких як IS-95, cdma2000, IS-856, W-CDMA, TDSCDMA і інших стандартів. Мережа CDMA може реалізовувати радіотехнологію типу універсального наземного радіодоступу (UTRA), cdma2000 або яку-небудь іншу технологію. Радіотехнологія UTRA включає в себе W-CDMA і низьку частоту проходження елементарних посилок (LCR). Технологія cdma2000 обслуговує стандарти IS-2000, IS-95 і IS856. Мережа TDMA може реалізовувати радіотехнологію типу глобальної системи для мобільних комунікацій (GSM). Мережа OFDMA може реалізовувати радіотехнологію типу еволюціонованого UTRA (E-UTRA), IEEE 802.11, IEEE 802.16, IEEE 802.20, Flash-OFDM® і т. д. UTRA, E-UTRA і GSM є частиною універсальної системи мобільних телекомунікацій (UMTS). Ідеї, що викладаються в даному документі, можуть бути реалізовані в системі 3GPP довгострокової еволюції (LTE), в ультрамобільній широкосмуговій системі (UMB) і в інших типах систем. Система LTE являє собою версію UMTS, що використовує E-UTRA. Опис певних варіантів винаходу може бути здійснений з використанням термінології 3GPP, однак потрібно розуміти, що ідеї, які викладаються в даному документі, можуть бути використані як застосовно 8 UA 102766 C2 5 10 15 20 25 30 35 40 45 50 55 60 до технології 3GPP (Rel99, Rel5, Rel6, Rel7 і т. д.), так і до технології 3GPP2 (IxRTT, IxEV-DO Rel0, RevA, RevB), а також до інших технологій. Ідеї, що викладаються в даному документі, можуть бути впроваджені (наприклад, реалізовані або виконані) в ряді пристроїв (наприклад, у вузлах). У деяких варіантах вузол (наприклад, бездротовий вузол), реалізований відповідно до ідей, що викладаються в даному документі, може містити точку доступу або термінал доступу. Наприклад, термінал доступу може бути реалізований або іменуватися як користувацьке обладнання, абонентська станція, абонентський пункт, мобільна станція, мобільний телефон, мобільний вузол, віддалена станція, віддалений термінал, користувацький термінал, користувацький агента або користувацький пристрій або яким-небудь іншим терміном. У деяких прикладах реалізації термінал доступу може містити стільниковий телефон, радіотелефон, телефон, працюючий на основі протоколу ініціювання сеансу (SIP), станцію з бездротовим абонентським шлейфом (WLL), персональний цифровий секретар (PDA), переносний пристрій з можливістю бездротового зв'язку або який-небудь інший пристрій обробки, що відповідає необхідним вимогам, підключений до бездротового модема. Відповідно до цього один або більше розглянутих в даному документі варіантів можуть бути впроваджені в телефон (наприклад, в стільниковий телефон або в смартфон), комп'ютер (наприклад, в компактний портативний комп'ютер), портативний пристрій зв'язку, портативний обчислювальний пристрій (наприклад, в персональний інформаційний помічник), розважальний пристрій (наприклад, в музичний пристрій, відеопристрій або супутникове радіо), пристрій в системі глобального позиціонування або будь-який інший пристрій, що відповідає необхідним вимогам, сконфігурований для обміну інформацією за допомогою бездротового середовища. Точка доступу може містити, бути реалізована або іменуватися як Node B, eNode B, контролер радіомережі (RNC), базова станція (BS), базова радіостанція (RBS), контролер базової станції (BSC), базова приймально-передавальна станція (BTS), функція приймачапередавача (TF), радіоприймач-передавач, радіомаршрутизатор, набір базових послуг (BSS), розширений набір послуг (ESS) або яким-небудь іншим терміном. У деяких варіантах вузол (наприклад, точка доступу) може містити вузол доступу для системи зв'язку. Такий вузол доступу може забезпечити, наприклад, можливість підключення для мережі або до мережі (наприклад, до глобальної мережі типу Інтернету або стільникової мережі) за допомогою дротової або бездротової лінії зв'язку з мережею. Відповідно до цього вузол доступу може забезпечувати для іншого вузла (наприклад, для термінала доступу) можливість доступу до мережі або до яких-небудь інших функціональних можливостей. До цього потрібно також додати, що один або обидва з вузлів можуть бути портативними або, в деяких випадках, відносно непортативними. Крім того, потрібно враховувати, що бездротовий вузол може бути виконаний з можливістю передачі і/або прийому інформації небездротовим способом (наприклад, за допомогою дротового підключення). Таким чином, приймач і передавач, що розглядаються в даному документі, можуть включати в себе компоненти відповідного зв'язного інтерфейсу (наприклад, компоненти електричного або оптичного інтерфейсу) для обміну інформацією через небездротове середовище. Бездротовий вузол може обмінюватися інформацією за допомогою однієї або більше ліній бездротового зв'язку на основі будь-якої технології бездротового зв'язку, що відповідає необхідним вимогам, або, іншими словами, підтримує цю технологію. Наприклад, в деяких варіантах бездротовий вузол може бути пов'язаний з мережею. У деяких варіантах мережа може містити локальну мережу або глобальну мережу. Бездротовий пристрій може підтримувати або, іншими словами, використовувати одну або більше з різних технологій, протоколів або стандартів бездротового зв'язку типу розглянутих в даному документі (наприклад, CDMA, TDMA, OFDM, OFDMA, WiMAX, Wi-Fi і т. д.). Точно так само бездротовий вузол може підтримувати або, іншими словами, використовувати одну або більше з різних систем модуляції або мультиплексування. Бездротовий вузол може, таким чином, включати в себе відповідні компоненти (наприклад, повітряні інтерфейси) для встановлення зв'язку і обміну інформацією за допомогою однієї або більше ліній бездротового зв'язку з використанням вищезазначених або інших технологій бездротового зв'язку. Наприклад, бездротовий вузол може містити бездротовий приймач-передавач з відповідними компонентами передавача і приймача, які можуть включати в себе різні компоненти (наприклад, генератори сигналів і процесори сигналів), які полегшують обмін інформацією по бездротовому середовищу. Фіг. 8 ілюструє приклад блок-схеми системи 800 відповідно до додаткових варіантів, описуваних в даному документі. Система 800 являє собою пристрій, який може полегшити синхронізацію фемтостільника. Зокрема, система 800 може включати в себе велике число 9 UA 102766 C2 5 10 15 20 25 30 35 40 45 50 55 60 модулів або засобів, таких як, наприклад, засіб 810 синхронізації, засіб 820 прийому, засіб 830 розділення, засіб 840 вставлення, засіб 850 створення, кожний з яких підключений до лінії 805 зв'язку і може обмінюватися інформацією з іншими модулями або засобами по лінії 805 зв'язку. Незважаючи на те, що в даному документі описуються конкретні варіанти здійснення даного винаходу, фахівці в даній галузі техніки можуть розробити різні модифікації даного винаходу, не відступаючі від патентованої концепції. Наприклад, ідеї, що викладаються в даному документі стосуються елементів мережі з комутацією каналів, але в однаковій мірі можуть бути використані і застосовно до елементів мережі з доменом пакетної комутації. Фахівцям в даній галузі техніки зрозуміло, що інформація і сигнали можуть бути представлені і з використанням будь-якої з ряду різних технологій і будь-якого з ряду різних методів. Наприклад, дані, інструкції, команди, інформація, сигнали, біти, символи і чипи, що згадуються протягом всього наведеного вище опису, можуть бути представлені напругами, струмами, електромагнітними хвилями, магнітними полями або частинками, оптичними полями або частинками або будь-якою їх комбінацією. Крім того, фахівцям в даній галузі техніки очевидно, що різні ілюстративні логічні блоки, модулі, схеми, способи і алгоритми, що описуються в зв'язку з прикладами, розкритими в даному документі, можуть бути здійснені у вигляді електронних апаратних засобів, програмного забезпечення для комп'ютерів або комбінації того і іншого. Щоб доступно проілюструвати цю взаємозамінність апаратних засобів і програмного забезпечення, опис різних ілюстративних компонентів, блоків, модулів, схем, способів і алгоритмів здійснювався, як правило, в термінах їх функціональних можливостей. Можливість реалізації таких функціональних можливостей у вигляді апаратних засобів або програмного забезпечення визначається специфікою застосування і проектними обмеженнями, що накладаються на систему загалом. Фахівці в даній галузі техніки можуть реалізувати описувані функціональні можливості різними шляхами для кожної специфічної сфери застосування, але такі впроваджувальні рішення не повинні інтерпретуватися як такі, що приводять до виходу за межі обсягу даного винаходу. Різні ілюстративні логічні блоки, модулі і схеми, розглянуті в зв'язку з прикладами, розкритими в даному документі, можуть бути реалізовані або виконані за допомогою процесора загального призначення, процесора цифрових сигналів (DSP), інтегральної схеми прикладної орієнтації (ASIC), програмованої користувачем вентильної матриці (FPGA) або іншого програмованого логічного пристрою, логічної схеми на дискретних вентилях або на транзисторах, дискретних апаратних компонентів або будь-якої їх комбінації, спроектованої для виконання функцій, описуваних в даному документі. Процесор загального призначення може бути мікропроцесором, але в альтернативі процесор може бути будь-яким звичайним процесором, контролером, мікроконтролером або кінцевим автоматом. Процесор може бути також реалізований у вигляді обчислювальних пристроїв, наприклад, у вигляді комбінації DSP і мікропроцесора, у вигляді великого числа мікропроцесорів, у вигляді одного або більше мікропроцесорів в поєднанні з DSP-ядром або у вигляді будь-якої іншої такої конфігурації. Способи або алгоритми, розглянуті в зв'язку з прикладами, розкритими в даному документі, можуть бути здійснені безпосередньо в апаратному виконанні, у вигляді програмного модуля, виконуваного процесором, або у вигляді комбінації апаратних і програмних засобів. Програмний модуль може постійно зберігатися в ОЗП (RAM), у флеш-пам'яті, в ПЗП (ROM), СПЗП (EPROM), ЕСППЗП (EEPROM), в регістрах, на жорсткому диску, на змінному диску, на неперезаписуваному компакт-диску або на носії даних будь-якої іншої форми, відомому фахівцям в даній галузі техніки. Носій даних може бути сполучений з процесором так, щоб процесор міг зчитувати інформацію з носія даних і записувати інформацію на носій даних. У альтернативі, носій даних може бути невід'ємною частиною процесора. Процесор і носій даних можуть бути виконані у вигляді ASIC. У одному або більше ілюстративних прикладах здійснення описані функції можуть бути реалізовані апаратними, програмними або мікропрограмними засобами або будь-якими їх комбінаціями. При програмній реалізації функції можуть зберігатися на машиночитаному носії або передаватися як одна або більше інструкцій або код. Машиночитані носії включають в себе як комп'ютерні носії інформації, так і середовища передачі даних, в тому числі будь-який носій інформації, що полегшує передачу комп'ютерної програми з одного місця в інше. Носії інформації можуть бути будь-якими доступними носіями, можливість доступу до яких забезпечується за допомогою комп'ютера. Як необмежувальний приклад, такі машиночитані носії можуть містити ОЗП, ПЗП, ЕСППЗП, неперезаписуваний компакт-диск (CD-ROM) або інший накопичувач на оптичних дисках, накопичувач на магнітних дисках або інші магнітні запам'ятовуючі пристрої або будь-який інший носій інформації, який може бути використаний для перенесення або зберігання цільового програмного коду у формі інструкцій або структур 10 UA 102766 C2 5 10 15 20 даних і можливість доступу до якого забезпечується за допомогою комп'ютера. Крім того, машиночитаним носієм повинно іменуватися і будь-яке підключення. Наприклад, у випадку передачі програмного забезпечення з Web-сайта або сервера або від іншого віддаленого джерела з використанням коаксіального кабелю, волоконно-оптичного кабелю, витої пари, цифрової абонентської лінії (DSL) або бездротових технологій, що використовують інфрачервоне випромінювання, радіо- і мікрохвилі, коаксіальний кабель, волоконно-оптичний кабель, вита пара, DSL або бездротові технології, що використовують інфрачервоне випромінювання, радіо- і мікрохвилі, включені у визначення носія інформації. Диск в даному документі включає в себе компакт-диск (CD), лазерний диск, оптичний диск, цифровий універсальний диск (DVD), дискету і диск формату Blu-ray, причому відтворення даних з дискети здійснюється, як правило, за допомогою магнітного поля, а відтворення даних з CD, лазерного диска, оптичного диска, DVD і диска формату Blu-ray здійснюється за допомогою оптичного випромінювання, джерелом якого є лазери. Попередній опис розкритих прикладів здійснення призначений для забезпечення можливості будь-якому фахівцю в даній галузі техніки реалізувати або використати даний винахід. Фахівцям в даній галузі техніки будуть цілком очевидні різні модифікації цих прикладів здійснення, і визначені в даному документі загальні принципи можуть бути використані застосовно до інших прикладів здійснення без відхилення від суті або обсягу винаходу. Таким чином, даний винахід не обмежений представленими в даному документі прикладами здійснення і повинен відповідати найширшому обсягу, сумісному з принципами і новими ознаками, розкритими в даному документі. ФОРМУЛА ВИНАХОДУ 25 30 35 40 45 50 55 1. Спосіб задавання фаз пілот-сигналу фемтостільників, який включає етапи, на яких: розділяють 2 на множину зміщень фаз для макростільників; вставляють множину зміщень фаз для фемтостільників між зміщеннями фаз для макростільників, причому кожне зміщення фази для фемтостільника вставляється між двома сусідніми зміщеннями фаз для макростільника; і створюють щонайменше те ж число зміщень фаз пілот-сигналів для фемтостільників, що і для макростільників. 2. Спосіб за п. 1, в якому етап створення щонайменше того ж числа зміщень фаз пілот-сигналів для фемтостільників, що і для макростільників, додатково містить зменшення значень параметра PILOT_INC зі збереженням зміщень фаз для макростільників при парних приростах мінімального фазового інтервалу і, таким чином, створення непарних приростів фазового інтервалу для зміщень PN фемтостільників. 3. Спосіб за п. 1, в якому параметр PILOT_INC використовується для керування розміром зміщень PN для фемтостільників, що відрізняються від зміщень фази PN для макростільників. 4. Спосіб за п. 1, в якому при низькій щільності фемтостільників підгрупа непарних зміщень PN може бути використана для фемтостільників і в явній формі включена в список сусідів. 5. Спосіб за п. 1, в якому при високій щільності фемтостільників нове користувацьке обладнання (UE), орієнтоване на фемтостільники, буде вводитися в дію і конфігуруватися для маніпулювання набором зміщень PN фемтостільників без їх явного включення в список сусідів. 6. Пристрій для задавання фаз пілот-сигналу фемтостільників, який містить: засіб для розділення 2 на множину зміщень фаз для макростільників; засіб для вставлення множини зміщень фаз для фемтостільників між зміщеннями фаз для макростільників, причому кожне зміщення фази для фемтостільника вставляється між двома сусідніми зміщеннями фаз для макростільника; і засіб для створення щонайменше одного і того ж числа зміщень фаз пілот-сигналів для фемтостільників і для макростільників. 7. Пристрій за п. 6, в якому засіб для створення щонайменше одного і того ж числа зміщень фаз пілот-сигналів для фемтостільників і для макростільників містить засіб для зменшення значення параметра PILOT_INC зі збереженням зміщень фаз для макростільників при парних приростах мінімального фазового інтервалу і, таким чином, створення непарних приростів фазового інтервалу для зміщень PN для фемтостільників. 8. Пристрій за п. 6, в якому параметр PILOT_INC використовується для керування розміром зміщень PN для фемтостільників. 9. Пристрій за п. 6, в якому при низькій щільності фемтостільників підгрупа непарних зміщень PN може бути використана для фемтостільників і в явній формі включена в список сусідів. 11 UA 102766 C2 5 10 15 20 25 30 10. Пристрій за п. 6, в якому при високій щільності фемтостільників нове UE, орієнтоване на фемтостільники, буде вводитися в дію і конфігуруватися для маніпулювання набором зміщень PN фемтостільників без їх явного включення в список сусідів. 11. Пристрій для задавання фаз пілот-сигналів фемтостільників, який містить: процесор для розділення 2 на множину зміщень фаз для макростільників, для вставлення множини зміщень фаз для фемтостільників між зміщеннями фаз для макростільників, причому кожне зміщення фази для фемтостільника вставляється між двома сусідніми зміщеннями фаз для макростільників, і для створення щонайменше одного і того ж числа зміщень фаз пілотсигналів для фемтостільників і для макростільників. 12. Машиночитаний носій, який містить виконувані комп'ютером коди для спонукання комп'ютера здійснювати: розділення 2 на множину зміщень фаз для макростільників; вставлення множини зміщень фаз для фемтостільників між зміщеннями фаз для макростільників, причому кожне зміщення фази для фемтостільника вставляється між двома сусідніми зміщеннями фаз для макростільників; і створення щонайменше одного і того ж числа зміщень фаз пілот-сигналів для фемтостільників і для макростільників. 13. Машиночитаний носій за п. 12, в якому коди для створення щонайменше одного і того ж числа фаз пілот-сигналів для фемтостільників і для макростільників додатково містять коди для забезпечення комп'ютером зменшення значення параметра PILOT_INC зі збереженням зміщень фаз для макростільників при парних приростах мінімального фазового інтервалу і, таким чином, створення непарних приростів фазового інтервалу для зміщень PN для фемтостільників. 14. Машиночитаний носій за п. 12, причому параметр PILOT_INC використовується для керування розміром зміщень PN для фемтостільників. 15. Машиночитаний носій за п. 12, причому при низькій щільності фемтостільників підгрупа непарних зміщень PN може бути використана для фемтостільників і в явній формі включена в список сусідів. 16. Машиночитаний носій за п. 12, причому при високій щільності фемтостільників нове UE, орієнтоване на фемтостільники, буде вводитися в дію і конфігуруватися для маніпулювання набором зміщень PN без їх явного включення в список сусідів. 12 UA 102766 C2 13 UA 102766 C2 14 UA 102766 C2 15 UA 102766 C2 16 UA 102766 C2 17 UA 102766 C2 Комп’ютерна верстка А. Крижанівський Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 18
ДивитисяДодаткова інформація
Назва патенту англійськоюFemtocell synchronization and pilot search methodology
Автори англійськоюGogic, Alexandar M.
Назва патенту російськоюСинхронизация фемтосот и методология поиска пилот-сигнала
Автори російськоюГоджик Александар М.
МПК / Мітки
МПК: H04W 36/08, H04B 7/26, H04W 16/00
Мітки: методологія, пілот-сигналу, пошуку, синхронізація, фемtoстільників
Код посилання
<a href="https://ua.patents.su/20-102766-sinkhronizaciya-femtostilnikiv-i-metodologiya-poshuku-pilot-signalu.html" target="_blank" rel="follow" title="База патентів України">Синхронізація фемтостільників і методологія пошуку пілот-сигналу</a>
Синхронізація фемтостільників і методологія пошуку пілот-сигналу
Номер патенту: 102031
Опубліковано: 27.05.2013
Автор: Годжик Александар М.
МПК: H04B 7/26, H04W 16/00, H04W 36/08
Мітки: методологія, фемtoстільників, синхронізація, пілот-сигналу, пошуку
Формула / Реферат:
1. Спосіб передачі обслуговування в режимі "не зайнято", який включає етапи, на яких:здійснюють роботу успадкованої мобільної станції ("MS") в стані "не зайнято" в макростільниковій мережі на частоті розгортання фемтостільників;виявляють за допомогою успадкованої MS пілот-сигнал фемтостільника переважної інтенсивності;демодулюють сигнал від фемтостільника, що знаходиться в режимі "не...
Синхронізація фемтостільників і методологія пошуку пілот-сигналу
Номер патенту: 99154
Опубліковано: 25.07.2012
Автор: Годжик Александар М.
МПК: H04B 7/26, H04W 16/00, H04W 36/08
Мітки: пошуку, пілот-сигналу, фемtoстільників, методологія, синхронізація
Формула / Реферат:
1. Спосіб синхронізації фемтостільника з макростільником, який включає етапи, на яких:приймають сигнал хронування передачі фемтостільника від макростільника за допомогою приймача прямої лінії зв'язку в фемтостільнику; іздійснюють синхронізацію сигналу хронування передачі фемтостільника з сигналом хронування передачі макростільника на основі сигналу приймача прямої лінії зв'язку.2. Спосіб за п. 1, в якому приймач прямої...
Спосіб та пристрій пошуку пілот-сигналу у системі безпровідного зв’язку
Номер патенту: 71022
Опубліковано: 15.11.2004
Автор: Соліман Самір С.
МПК: H04B 1/707, H04Q 7/38
Мітки: системі, пошуку, пристрій, спосіб, зв'язку, пілот-сигналу, безпровідного
Формула / Реферат:
1. Спосіб пошуку пілот-сигналу у системі безпровідного зв'язку, який включає: -визначення місцеположення мобільної станції у зазначеній системі безпровідного зв'язку, -визначення сукупності розмірів вікон пошуку, що відповідає сукупності пілот-сигналів, базуючись на зазначеному місцеположенні мобільної станції відносно відповідного місцеположення передавального джерела зазначеної сукупності пілот-сигналів.2. Спосіб за п....
Способи та пристрої для передачі і прийому пілот-сигналу і даних з швидким стрибкоподібним перестроюванням частоти з мультиплексованим з кодовим розділенням пілот-сигналом у системі мдочр
Номер патенту: 88873
Опубліковано: 10.12.2009
Автори: Агравал Авніш, Тіг Едвард Харрісон
МПК: H04B 7/00, H04B 7/212
Мітки: кодовим, пілот-сигналу, пристрої, розділенням, мультиплексованим, швидким, стрибкоподібним, передачі, даних, пілот-сигналом, частоти, мдочр, перестроюванням, прийому, способи, системі
Формула / Реферат:
1. Спосіб передачі широкосмугового пілот-сигналу у системі безпровідного зв'язку з множинними несучими, який полягає у тому, що обробляють щонайменше один символ пілот-сигналу псевдовипадковим числовим (PN) кодом для одержання послідовності чіпів пілот-сигналу для широкосмугового пілот-сигналу, обробляють символи даних відповідно до схеми модуляції множинних несучих для одержання послідовності чіпів даних, мультиплексують з часовим...
Спосіб створення допоміжного пілот-сигналу, спосіб його прийому і пристрій для його здійснення та спосіб індивідуальної передачі
Номер патенту: 63963
Опубліковано: 16.02.2004
Автори: Тідеманн Едвард Г., мол., Оденвалдер Джозеф П., Ландбі Стайн А.
МПК: H04J 11/00, H04B 1/707, H04B 7/26
Мітки: пілот-сигналу, передачі, індивідуальної, прийому, здійснення, допоміжного, спосіб, створення, пристрій
Формула / Реферат:
1. Спосіб створення допоміжного пілот-сигналу, який передбачає операції: прийому пілотних даних і покриття зазначених пілотних даних пілотною послідовністю Уолша, яку утворюють конкатенацією основної послідовності Уолша і її комплементарної послідовності.2. Спосіб за п. 1, який відрізняється тим, що зазначена основна послідовність Уолша є послідовністю нулів.3. Спосіб за п. 1, який відрізняється тим, що зазначена основна...
Попередній патент: Газорозрядна електронна гармата
Наступний патент: Спосіб рафінування вторинного чорнового свинцю від міді
Випадковий патент: Гравітаційний ударник для руйнування негабаритів