Нульові пілот-сигнали для виконання оцінки перешкод в системі бездротового зв’язку
Номер патенту: 96539
Опубліковано: 10.11.2011
Автори: Бхушан Нага, Цзи Тінфан, Борран Мохаммад Дж., Агравал Авніш, Кхандекар Аамод Д., Горохов Алєксєй Ю.
Формула / Реферат
1. Спосіб підтримки оцінки перешкод в мережі бездротового зв'язку, що включає:
визначення ресурсів для передачі нульового пілот-сигналу чарункою в кластері чарунок; і
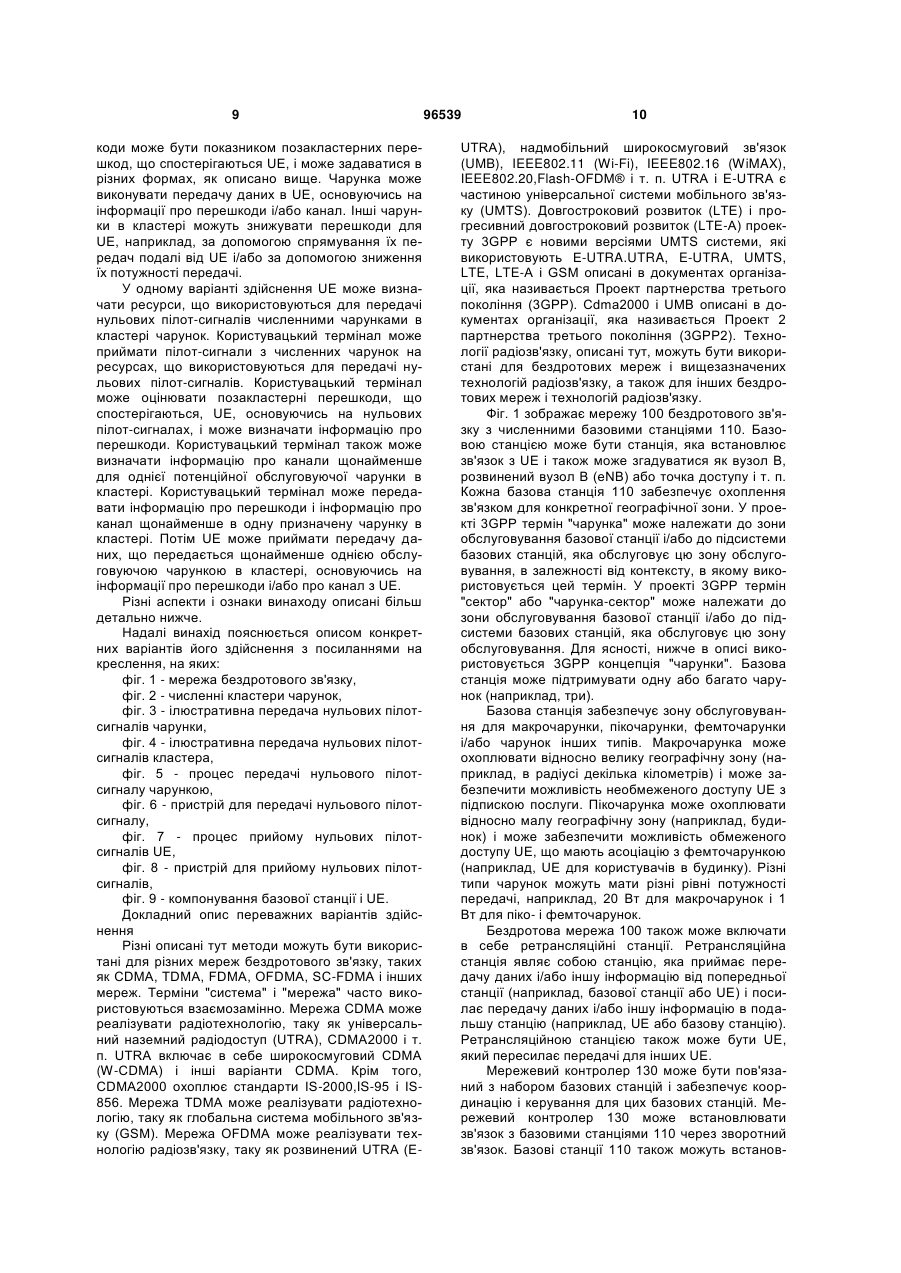
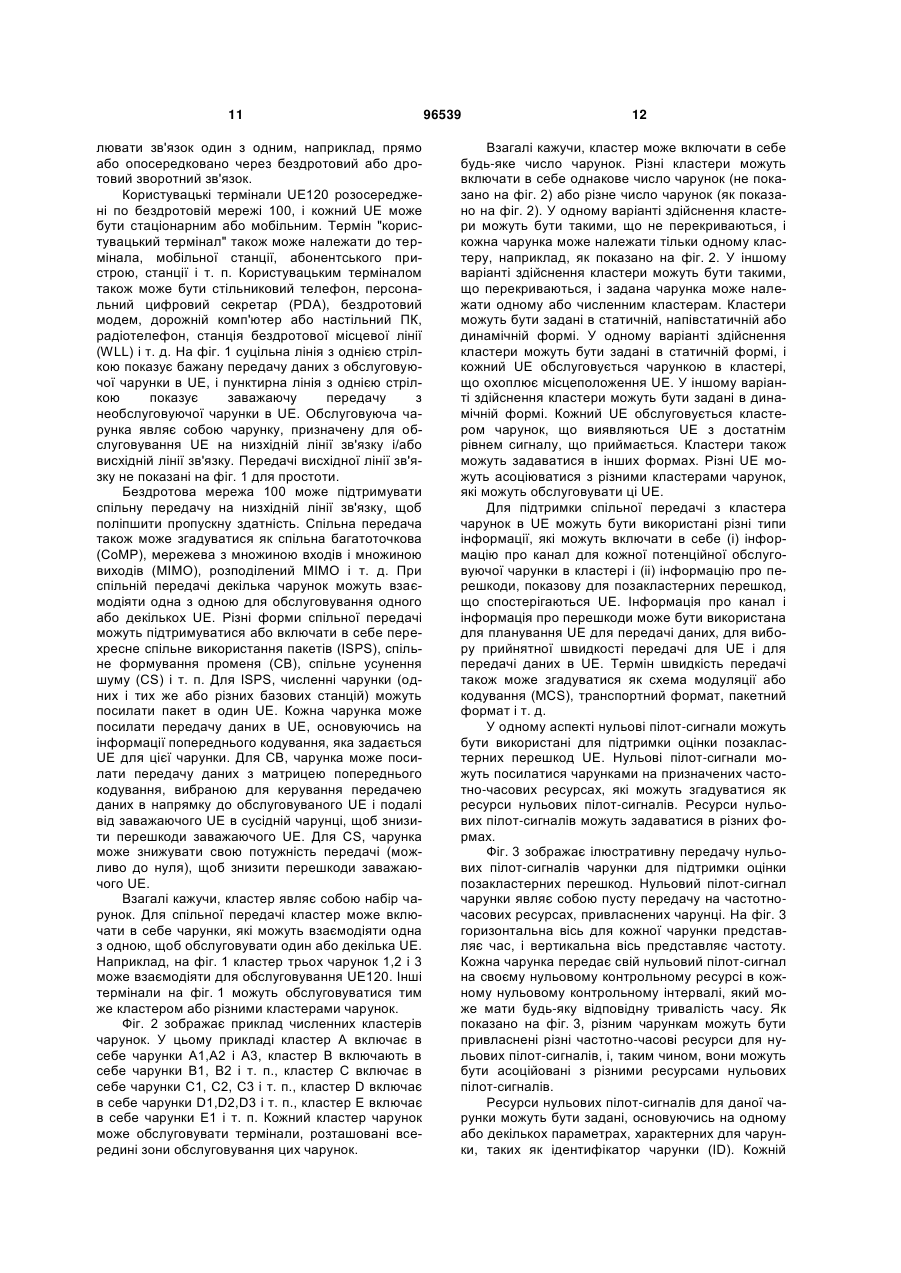
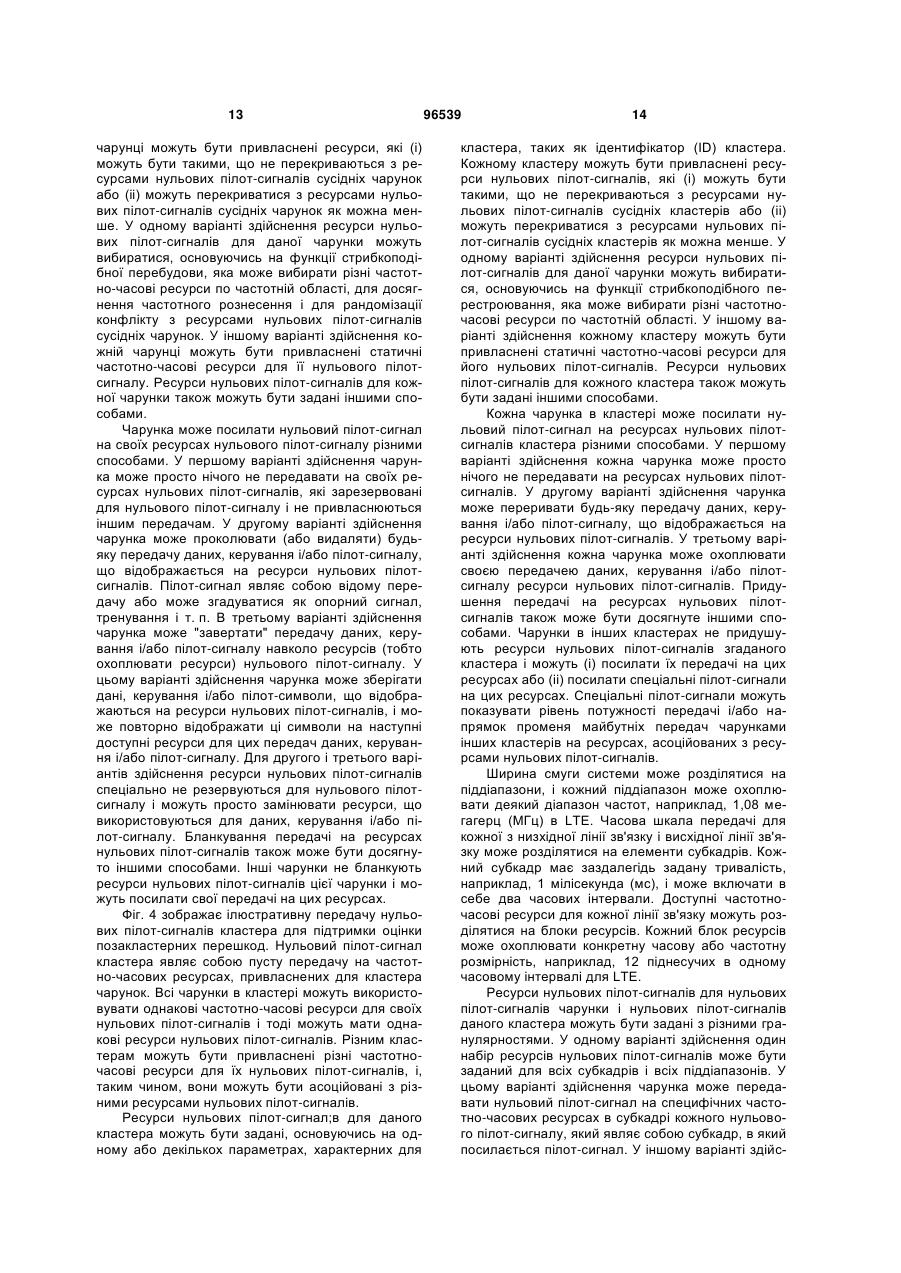
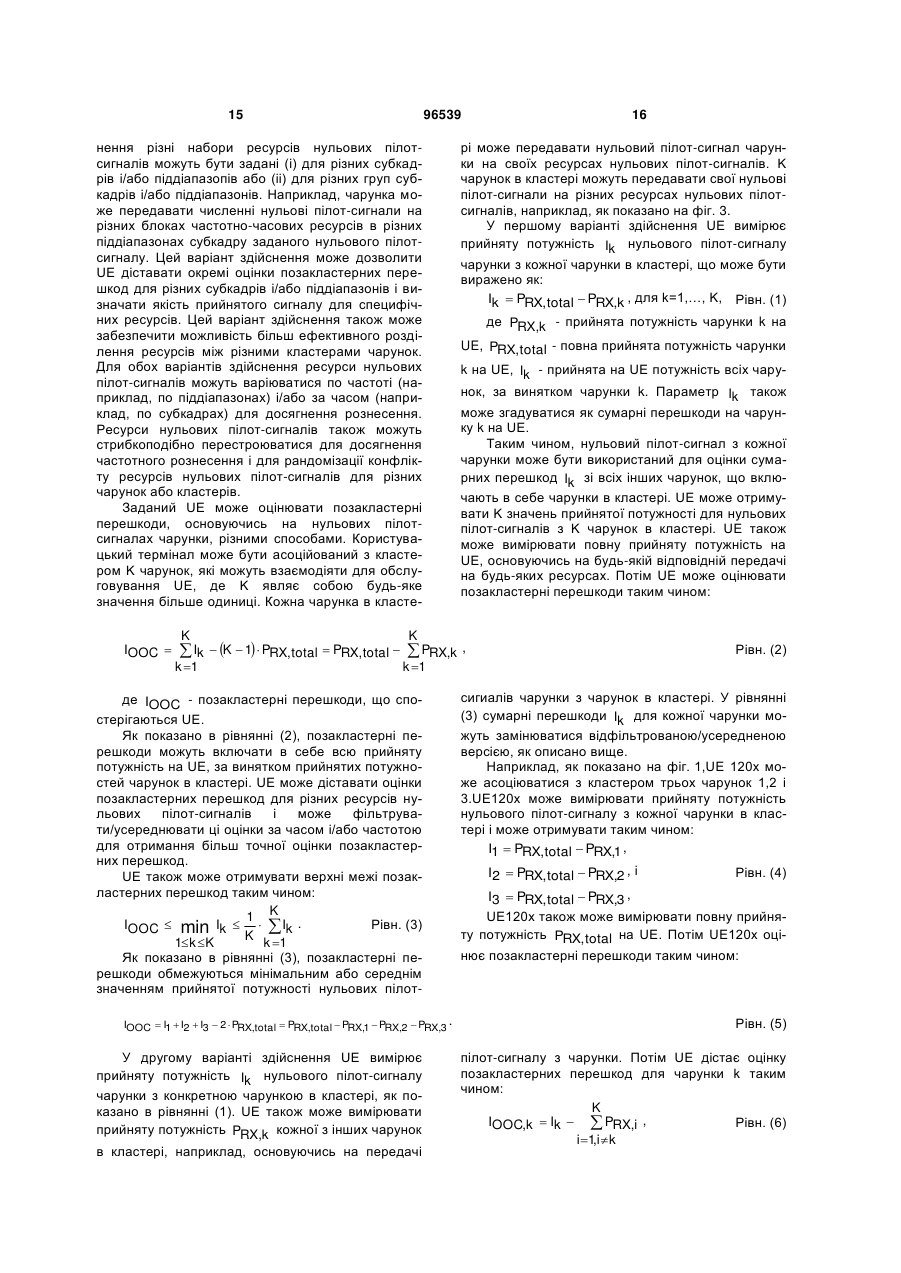
передачу нульового пілот-сигналу на згаданих ресурсах чарункою, щоб дозволити користувацьким терміналам (UE) оцінювати позакластерні перешкоди, що містять перешкоди від чарунок, що не належать їх кластеру.
2. Спосіб за п. 1, в якому кожній чарунці в кластері чарунок присвоюються різні ресурси для передачі нульового пілот-сигналу.
3. Спосіб за п. 1, в якому всі чарунки в кластері використовують однакові ресурси для передачі нульових пілот-сигналів, і в якому різним кластерам присвоюються різні ресурси для передачі нульових пілот-сигналів.
4. Спосіб за п. 1, в якому визначення ресурсів для передачі нульового пілот-сигналу включає визначення ресурсів для передачі нульового пілот-сигналу, основуючись на функції ідентифікатора (ID) чарунки або кластера.
5. Спосіб за п. 1, в якому передача нульового пілот-сигналу включає відправлення пустих передач на ресурсах для передачі нульового пілот-сигналу за допомогою проколювання символів, що відображаються на ресурси.
6. Спосіб за п. 1, в якому передача нульового пілот-сигналу включає відправлення пустих передач на ресурсах для передачі нульового пілот-сигналу за допомогою визначення символів, що відображаються на ресурси, і за допомогою повторного відображення символів на інші ресурси.
7. Спосіб за п. 1, що додатково включає:
прийом інформації про перешкоди, показової для позакластерних перешкод, що спостерігаються UE; і
відправлення передачі даних в UE, основуючись на інформації про перешкоди.
8. Спосіб за п. 7, що додатково включає:
виконання оцінки якості прийнятого сигналу на UE, основуючись на інформації про перешкоди з UE; і
визначення швидкості передачі, основуючись на оціненій якості прийнятого сигналу, при цьому передача даних відправляється на певній швидкості передачі до UE.
9. Спосіб за п. 1, що додатково включає:
прийом інформації про канал для чарунки з UE;
визначення матриці попереднього кодування, основуючись на інформації про канал; і
відправлення передачі даних з матрицею попереднього кодування до UE, причому кожна інша чарунка в кластері знижує перешкоди для UE.
10. Спосіб за п. 1, що додатково включає:
прийом інформації про перешкоди, показової для позакластерних перешкод, що спостерігаються UE;
прийом інформації про канал щонайменше для однієї чарунки в кластері з UE; i
визначення того, чи планувати UE для передачі даних, основуючись на інформації про перешкоди і інформації про канал.
11. Пристрій для бездротового зв'язку, що містить:
засіб для визначення ресурсів для передачі нульового пілот-сигналу чарункою в кластері чарунок; і
засіб для передачі нульового пілот-сигналу на цих ресурсах чарункою, щоб дозволити користувацьким терміналам (UE) оцінювати позакластерні перешкоди, що містять перешкоди від чарунок, що не належать їх кластеру.
12. Пристрій за п. 11, в якому кожній чарунці в кластері чарунок присвоюються різні ресурси для передачі нульового пілот-сигналу.
13. Пристрій за п. 11, в якому всі чарунки в кластері використовують однакові ресурси для передачі нульових пілот-сигналів, і в якому різним кластерам присвоюються різні ресурси для передачі нульових пілот-сигналів.
14. Пристрій за п. 11, що додатково містить:
засіб для прийому інформації про перешкоди, показової для позакластерних перешкод, що спостерігаються UE; і
засіб для передачі даних до UE, основуючись на інформації про перешкоди.
15. Пристрій за п. 11, що додатково містить:
засіб для прийому інформації про канал для чарунки з UE;
засіб для визначення матриці попереднього кодування, основуючись на інформації про канал; і
засіб для передачі даних з матрицею попереднього кодування до UE, причому інші чарунки в кластері знижують перешкоди для UE.
16. Спосіб підтримки оцінки перешкод в мережі бездротового зв'язку, що включає:
прийом нульових пілот-сигналів з численних чарунок в мережі бездротового зв'язку; і
оцінку позакластерних перешкод, що спостерігаються користувацьким терміналом (UE), основуючись на нульових пілот-сигналах з численних чарунок, причому позакластерні перешкоди містять перешкоди з чарунок, що не належать кластеру.
17. Спосіб за п. 16, що додатково включає:
визначення ресурсів, що використовуються для передачі нульових пілот-сигналів численними чарунками в кластері, причому кожній чарунці в кластері присвоюються різні ресурси для передачі нульового пілот-сигналу.
18. Спосіб за п. 16, що додатково включає:
визначення ресурсів, що використовуються для передачі нульових пілот-сигналів численними чарунками в кластері, причому всі чарунки в кластері використовують однакові ресурси для передачі нульових пілот-сигналів, і різним чарункам в кластері присвоюються різні ресурси для передачі нульових пілот-сигналів.
19. Спосіб за п. 17, в якому оцінка позакластерних перешкод включає:
визначення прийнятої потужності нульового пілот-сигналу з кожної чарунки в кластері;
визначення повної прийнятої потужності на UE; і
оцінку позакластерних перешкод, основуючись на прийнятих потужностях нульових пілот-сигналів зі всіх чарунок в кластері і повній прийнятій потужності на UE.
20. Спосіб за п. 19, в якому оцінка позакластерних перешкод додатково включає:
обмеження позакластерних перешкод, основуючись на мінімальній або середній з прийнятих потужностей нульових пілот-сигналів з численних чарунок в кластері.
21. Спосіб за п. 17, в якому оцінка позакластерних перешкод включає:
визначення прийнятої потужності кожної чарунки в кластері;
визначення прийнятої потужності нульового пілот-сигналу з кожної з щонайменше однієї чарунки в кластері; і
оцінку позакластерних перешкод, основуючись на прийнятій потужності кожної чарунки в кластері і прийнятій потужності нульового пілот-сигналу з кожної з щонайменше однієї чарунки в кластері.
22. Спосіб за п. 18, в якому оцінка позакластерних перешкод включає:
визначення прийнятої потужності нульових пілот-сигналів зі всіх чарунок в кластері; і
оцінку позакластерних перешкод, основуючись на прийнятій потужності нульових пілот-сигналів зі всіх чарунок в кластері.
23. Спосіб за п. 17, що додатково включає:
визначення повної прийнятої потужності на UE;
визначення прийнятої потужності нульового пілот-сигналу з деякої чарунки в кластері; і
визначення прийнятої потужності чарунки, основуючись на повній прийнятій потужності на UE і прийнятій потужності нульового пілот-сигналу з чарунки.
24. Спосіб за п. 16, в якому UE оснащене множиною приймальних антен, і в якому оцінка позакластерних перешкод включає визначення коваріаційної матриці позакластерних перешкод.
25. Спосіб за п. 16, що додатково включає:
визначення матриці просторового фільтра, основуючись на позакластерних перешкодах; і
застосування матриці просторового фільтра до позакластерних перешкод для отримання постпроцесорних позакластерних перешкод.
26. Спосіб за п. 16, що додатково включає:
визначення інформації про перешкоди, показової для позакластерних перешкод; і
відправлення інформації про перешкоди щонайменше в одну призначену чарунку в кластері.
27. Спосіб за п. 26, в якому інформація про перешкоди містить щонайменше один параметр з потужності позакластерних перешкод, коваріаційної матриці позакластерних перешкод, прийнятих позакластерних перешкод перед просторовою обробкою в приймачі на UE і постпроцесорних позакластерних перешкод після просторової обробки в приймачі на UE.
28. Спосіб за п. 16, що додатково включає:
визначення інформації про канал щонайменше для однієї потенційної обслуговуючої чарунки в кластері; і
відправлення інформації про канал щонайменше в одну призначену чарунку в кластері.
29. Спосіб за п. 28, в якому інформація про канал для кожної потенційної обслуговуючої чарунки містить матрицю каналів для чарунки або складову матрицю каналу для чарунки з просторовою обробкою в приймачі на UE.
30. Спосіб за п. 16, що додатково включає:
прийом передачі даних щонайменше з однієї чарунки в кластері, причому кожна з інших чарунок в кластері знижує перешкоди на UE.
31. Пристрій для бездротового зв'язку, що містить:
засіб для прийому нульових пілот-сигналів з численних чарунок в мережі бездротового зв'язку; і
засіб для оцінки позакластерних перешкод, що спостерігаються користувацьким терміналом (UE), основуючись на нульових пілот-сигналах з численних чарунок, причому позакластерні перешкоди містять перешкоди з чарунок, що не належать кластеру.
32. Пристрій за п. 31, що додатково містить:
засіб для визначення ресурсів, що використовуються для передачі нульових пілот-сигналів численними чарунками в кластері, причому кожній чарунці або кожному кластеру присвоюються різні ресурси для передачі нульового пілот-сигналу.
33. Пристрій за п. 31, в якому засіб для оцінки позакластерних перешкод містить:
засіб для визначення прийнятої потужності нульового пілот-сигналу з кожної з щонайменше однієї чарунки в кластері; і
засіб для оцінки позакластерних перешкод, основуючись на прийнятій потужності нульового пілот-сигналу з кожної з щонайменше однієї чарунки в кластері.
34. Пристрій за п. 31, в якому засіб для оцінки позакластерних перешкод містить:
засіб для визначення прийнятої потужності нульових пілот-сигналів зі всіх чарунок в кластері; і
засіб для оцінки позакластерних перешкод, основуючись на прийнятій потужності нульових пілот-сигналів зі всіх чарунок в кластері.
35. Пристрій за п. 31, який додатково містить:
засіб для визначення інформації про перешкоди, показової для позакластерних перешкод;
засіб для визначення інформації про канал щонайменше для однієї потенційної обслуговуючої чарунки в кластері;
засіб для передачі інформації про перешкоди і інформації про канал щонайменше в одну призначену чарунку в кластері; і
засіб для прийому передачі даних, що посилається щонайменше однією обслуговуючою чарункою в кластері, основуючись на інформації про перешкоди і інформації про канал, причому кожна з інших чарунок в кластері знижує перешкоди на UE.
36. Пристрій для бездротового зв'язку, який містить:
щонайменше один процесор, конфігурований для прийому нульових пілот-сигналів з численних чарунок в кластері чарунок і для виконання оцінки позакластерних перешкод, що спостерігаються користувацьким терміналом (UE), основуючись на нульових пілот-сигналах з численних чарунок, причому позакластерні перешкоди містять перешкоди з чарунок, що не належать кластеру.
37. Пристрій за п. 36, в якому щонайменше один процесор конфігурується для визначення ресурсів, що використовуються для передачі нульових пілот-сигналів численними чарунками в кластері, і в якому кожній чарунці в кластері або кожному кластеру присвоюються різні ресурси для передачі нульового пілот-сигналу.
38. Пристрій за п. 36, в якому щонайменше один процесор конфігурується для визначення прийнятої потужності нульового пілот-сигналу з кожної з щонайменше однієї чарунки в кластері і для виконання оцінки позакластерних перешкод, основуючись на прийнятій потужності нульового пілот-сигналу з кожної з щонайменше однієї чарунки в кластері.
39. Пристрій за п. 36, в якому щонайменше один процесор конфігурується для визначення прийнятої потужності нульових пілот-сигналів зі всіх чарунок в кластері і для виконання оцінки позакластерних перешкод, основуючись на прийнятій потужності нульових пілот-сигналів зі всіх чарунок в кластері.
40. Пристрій за п. 36, в якому щонайменше один процесор конфігурується для визначення інформації про перешкоди, показової для позакластерних перешкод, для визначення інформації про канал щонайменше для однієї потенційної обслуговуючої чарунки в кластері, для передачі інформації про перешкоди і інформації про канал щонайменше в одну призначену чарунку в кластері і для прийому передачі даних, що посилається щонайменше однією обслуговуючою чарункою в кластері, основуючись на інформації про перешкоди і інформації про канал, і в якому кожна з інших чарунок в кластері знижує перешкоди для UE.
41. Зчитуваний комп'ютером носій, що містить:
код для спонукання щонайменше одного комп'ютера для прийому нульових пілот-сигналів з численних чарунок в кластері; і
код для спонукання щонайменше одного комп'ютера для виконання оцінки позакластерних перешкод, що спостерігаються користувацьким терміналам (UE), основуючись на нульових пілот-сигналах з численних чарунок, причому позакластерні перешкоди містять перешкоди від чарунок, що не належать їх кластеру.
42. Спосіб підтримки оцінки перешкод в мережі бездротового зв'язку, що включає:
визначення ресурсів, зарезервованих для нульових пілот-сигналів для деякої чарунки; і
передачу нульового пілот-сигналу на зарезервованих ресурсах користувацьким терміналам (UE), щоб дозволити чарунці оцінювати позакластерні перешкоди від UE.
43. Спосіб за п. 42, що додатково включає:
прийом індикатора перешкод з чарунки, при цьому нульовий пілот-сигнал передається UE, що приймає індикатор перешкод, щоб дозволити чарунці оцінювати некеровані перешкоди від UE, що не приймають індикатор перешкод.
44. Спосіб за п. 42, що додатково включає:
прийом індикатора перешкод з чарунки, при цьому нульовий пілот-сигнал передається UE, що не приймає індикатор перешкод, щоб дозволити чарунці оцінювати керовані перешкоди від UE, що приймають індикатор перешкод.
45. Спосіб за п. 42, в якому зарезервовані ресурси призначаються для нульових пілот-сигналів для чарунок конкретного класу потужності, при цьому нульовий пілот-сигнал передається UE, що обслуговуються чарункою конкретного класу потужності, щоб дозволити чарунці оцінювати перешкоди через UE, що обслуговуються чарунками інших класів потужності.
46. Спосіб виконання оцінки перешкод в мережі бездротового зв'язку, що включає:
визначення ресурсів, зарезервованих для нульових пілот-сигналів для деякої чарунки;
прийом нульових пілот-сигналів з перших користувацьких терміналів (UE) в чарунці; і
виконання оцінки перешкод, що спостерігаються чарункою з других UE, основуючись на нульових пілот-сигналах з перших UE.
47. Спосіб за п. 46, що додатково включає:
відправлення індикатора перешкод з чарунки, при цьому нульові пілот-сигнали передаються першими UE, що приймають індикатор перешкод, щоб дозволити чарунці оцінювати некеровані перешкоди з других UE, що не приймають індикатор перешкод.
48. Спосіб за п. 46, що додатково включає:
відправлення індикатора перешкод з чарунки, при цьому нульові пілот-сигнали передаються першими UE, що не приймають індикатор перешкод, щоб дозволити чарунці оцінювати керовані перешкоди з других UE, що приймають індикатор перешкод.
49. Спосіб за п. 46, в якому зарезервовані ресурси призначаються для нульових пілот-сигналів для чарунок конкретного класу потужності, при цьому нульові пілот-сигнали передаються першими UE, що обслуговуються чарункою конкретного класу потужності, щоб дозволити чарунці оцінювати перешкоди через другі UE, що обслуговуються чарунками інших класів потужності.
Текст
1. Спосіб підтримки оцінки перешкод в мережі бездротового зв'язку, що включає: визначення ресурсів для передачі нульового пілотсигналу чарункою в кластері чарунок; і передачу нульового пілот-сигналу на згаданих ресурсах чарункою, щоб дозволити користувацьким терміналам (UE) оцінювати позакластерні перешкоди, що містять перешкоди від чарунок, що не належать їх кластеру. 2. Спосіб за п. 1, в якому кожній чарунці в кластері чарунок присвоюються різні ресурси для передачі нульового пілот-сигналу. 3. Спосіб за п. 1, в якому всі чарунки в кластері використовують однакові ресурси для передачі нульових пілот-сигналів, і в якому різним кластерам присвоюються різні ресурси для передачі нульових пілот-сигналів. 4. Спосіб за п. 1, в якому визначення ресурсів для передачі нульового пілот-сигналу включає визначення ресурсів для передачі нульового пілотсигналу, основуючись на функції ідентифікатора (ID) чарунки або кластера. 5. Спосіб за п. 1, в якому передача нульового пілот-сигналу включає відправлення пустих передач на ресурсах для передачі нульового пілот-сигналу 2 (19) 1 3 12. Пристрій за п. 11, в якому кожній чарунці в кластері чарунок присвоюються різні ресурси для передачі нульового пілот-сигналу. 13. Пристрій за п. 11, в якому всі чарунки в кластері використовують однакові ресурси для передачі нульових пілот-сигналів, і в якому різним кластерам присвоюються різні ресурси для передачі нульових пілот-сигналів. 14. Пристрій за п. 11, що додатково містить: засіб для прийому інформації про перешкоди, показової для позакластерних перешкод, що спостерігаються UE; і засіб для передачі даних до UE, основуючись на інформації про перешкоди. 15. Пристрій за п. 11, що додатково містить: засіб для прийому інформації про канал для чарунки з UE; засіб для визначення матриці попереднього кодування, основуючись на інформації про канал; і засіб для передачі даних з матрицею попереднього кодування до UE, причому інші чарунки в кластері знижують перешкоди для UE. 16. Спосіб підтримки оцінки перешкод в мережі бездротового зв'язку, що включає: прийом нульових пілот-сигналів з численних чарунок в мережі бездротового зв'язку; і оцінку позакластерних перешкод, що спостерігаються користувацьким терміналом (UE), основуючись на нульових пілот-сигналах з численних чарунок, причому позакластерні перешкоди містять перешкоди з чарунок, що не належать кластеру. 17. Спосіб за п. 16, що додатково включає: визначення ресурсів, що використовуються для передачі нульових пілот-сигналів численними чарунками в кластері, причому кожній чарунці в кластері присвоюються різні ресурси для передачі нульового пілот-сигналу. 18. Спосіб за п. 16, що додатково включає: визначення ресурсів, що використовуються для передачі нульових пілот-сигналів численними чарунками в кластері, причому всі чарунки в кластері використовують однакові ресурси для передачі нульових пілот-сигналів, і різним чарункам в кластері присвоюються різні ресурси для передачі нульових пілот-сигналів. 19. Спосіб за п. 17, в якому оцінка позакластерних перешкод включає: визначення прийнятої потужності нульового пілотсигналу з кожної чарунки в кластері; визначення повної прийнятої потужності на UE; і оцінку позакластерних перешкод, основуючись на прийнятих потужностях нульових пілот-сигналів зі всіх чарунок в кластері і повній прийнятій потужності на UE. 20. Спосіб за п. 19, в якому оцінка позакластерних перешкод додатково включає: обмеження позакластерних перешкод, основуючись на мінімальній або середній з прийнятих потужностей нульових пілот-сигналів з численних чарунок в кластері. 21. Спосіб за п. 17, в якому оцінка позакластерних перешкод включає: визначення прийнятої потужності кожної чарунки в кластері; 96539 4 визначення прийнятої потужності нульового пілотсигналу з кожної з щонайменше однієї чарунки в кластері; і оцінку позакластерних перешкод, основуючись на прийнятій потужності кожної чарунки в кластері і прийнятій потужності нульового пілот-сигналу з кожної з щонайменше однієї чарунки в кластері. 22. Спосіб за п. 18, в якому оцінка позакластерних перешкод включає: визначення прийнятої потужності нульових пілотсигналів зі всіх чарунок в кластері; і оцінку позакластерних перешкод, основуючись на прийнятій потужності нульових пілот-сигналів зі всіх чарунок в кластері. 23. Спосіб за п. 17, що додатково включає: визначення повної прийнятої потужності на UE; визначення прийнятої потужності нульового пілотсигналу з деякої чарунки в кластері; і визначення прийнятої потужності чарунки, основуючись на повній прийнятій потужності на UE і прийнятій потужності нульового пілот-сигналу з чарунки. 24. Спосіб за п. 16, в якому UE оснащене множиною приймальних антен, і в якому оцінка позакластерних перешкод включає визначення коваріаційної матриці позакластерних перешкод. 25. Спосіб за п. 16, що додатково включає: визначення матриці просторового фільтра, основуючись на позакластерних перешкодах; і застосування матриці просторового фільтра до позакластерних перешкод для отримання постпроцесорних позакластерних перешкод. 26. Спосіб за п. 16, що додатково включає: визначення інформації про перешкоди, показової для позакластерних перешкод; і відправлення інформації про перешкоди щонайменше в одну призначену чарунку в кластері. 27. Спосіб за п. 26, в якому інформація про перешкоди містить щонайменше один параметр з потужності позакластерних перешкод, коваріаційної матриці позакластерних перешкод, прийнятих позакластерних перешкод перед просторовою обробкою в приймачі на UE і постпроцесорних позакластерних перешкод після просторової обробки в приймачі на UE. 28. Спосіб за п. 16, що додатково включає: визначення інформації про канал щонайменше для однієї потенційної обслуговуючої чарунки в кластері; і відправлення інформації про канал щонайменше в одну призначену чарунку в кластері. 29. Спосіб за п. 28, в якому інформація про канал для кожної потенційної обслуговуючої чарунки містить матрицю каналів для чарунки або складову матрицю каналу для чарунки з просторовою обробкою в приймачі на UE. 30. Спосіб за п. 16, що додатково включає: прийом передачі даних щонайменше з однієї чарунки в кластері, причому кожна з інших чарунок в кластері знижує перешкоди на UE. 31. Пристрій для бездротового зв'язку, що містить: засіб для прийому нульових пілот-сигналів з численних чарунок в мережі бездротового зв'язку; і засіб для оцінки позакластерних перешкод, що спостерігаються користувацьким терміналом (UE), 5 основуючись на нульових пілот-сигналах з численних чарунок, причому позакластерні перешкоди містять перешкоди з чарунок, що не належать кластеру. 32. Пристрій за п. 31, що додатково містить: засіб для визначення ресурсів, що використовуються для передачі нульових пілот-сигналів численними чарунками в кластері, причому кожній чарунці або кожному кластеру присвоюються різні ресурси для передачі нульового пілот-сигналу. 33. Пристрій за п. 31, в якому засіб для оцінки позакластерних перешкод містить: засіб для визначення прийнятої потужності нульового пілот-сигналу з кожної з щонайменше однієї чарунки в кластері; і засіб для оцінки позакластерних перешкод, основуючись на прийнятій потужності нульового пілотсигналу з кожної з щонайменше однієї чарунки в кластері. 34. Пристрій за п. 31, в якому засіб для оцінки позакластерних перешкод містить: засіб для визначення прийнятої потужності нульових пілот-сигналів зі всіх чарунок в кластері; і засіб для оцінки позакластерних перешкод, основуючись на прийнятій потужності нульових пілотсигналів зі всіх чарунок в кластері. 35. Пристрій за п. 31, який додатково містить: засіб для визначення інформації про перешкоди, показової для позакластерних перешкод; засіб для визначення інформації про канал щонайменше для однієї потенційної обслуговуючої чарунки в кластері; засіб для передачі інформації про перешкоди і інформації про канал щонайменше в одну призначену чарунку в кластері; і засіб для прийому передачі даних, що посилається щонайменше однією обслуговуючою чарункою в кластері, основуючись на інформації про перешкоди і інформації про канал, причому кожна з інших чарунок в кластері знижує перешкоди на UE. 36. Пристрій для бездротового зв'язку, який містить: щонайменше один процесор, конфігурований для прийому нульових пілот-сигналів з численних чарунок в кластері чарунок і для виконання оцінки позакластерних перешкод, що спостерігаються користувацьким терміналом (UE), основуючись на нульових пілот-сигналах з численних чарунок, причому позакластерні перешкоди містять перешкоди з чарунок, що не належать кластеру. 37. Пристрій за п. 36, в якому щонайменше один процесор конфігурується для визначення ресурсів, що використовуються для передачі нульових пілот-сигналів численними чарунками в кластері, і в якому кожній чарунці в кластері або кожному кластеру присвоюються різні ресурси для передачі нульового пілот-сигналу. 38. Пристрій за п. 36, в якому щонайменше один процесор конфігурується для визначення прийнятої потужності нульового пілот-сигналу з кожної з щонайменше однієї чарунки в кластері і для виконання оцінки позакластерних перешкод, основуючись на прийнятій потужності нульового пілотсигналу з кожної з щонайменше однієї чарунки в кластері. 96539 6 39. Пристрій за п. 36, в якому щонайменше один процесор конфігурується для визначення прийнятої потужності нульових пілот-сигналів зі всіх чарунок в кластері і для виконання оцінки позакластерних перешкод, основуючись на прийнятій потужності нульових пілот-сигналів зі всіх чарунок в кластері. 40. Пристрій за п. 36, в якому щонайменше один процесор конфігурується для визначення інформації про перешкоди, показової для позакластерних перешкод, для визначення інформації про канал щонайменше для однієї потенційної обслуговуючої чарунки в кластері, для передачі інформації про перешкоди і інформації про канал щонайменше в одну призначену чарунку в кластері і для прийому передачі даних, що посилається щонайменше однією обслуговуючою чарункою в кластері, основуючись на інформації про перешкоди і інформації про канал, і в якому кожна з інших чарунок в кластері знижує перешкоди для UE. 41. Зчитуваний комп'ютером носій, що містить: код для спонукання щонайменше одного комп'ютера для прийому нульових пілот-сигналів з численних чарунок в кластері; і код для спонукання щонайменше одного комп'ютера для виконання оцінки позакластерних перешкод, що спостерігаються користувацьким терміналам (UE), основуючись на нульових пілот-сигналах з численних чарунок, причому позакластерні перешкоди містять перешкоди від чарунок, що не належать їх кластеру. 42. Спосіб підтримки оцінки перешкод в мережі бездротового зв'язку, що включає: визначення ресурсів, зарезервованих для нульових пілот-сигналів для деякої чарунки; і передачу нульового пілот-сигналу на зарезервованих ресурсах користувацьким терміналам (UE), щоб дозволити чарунці оцінювати позакластерні перешкоди від UE. 43. Спосіб за п. 42, що додатково включає: прийом індикатора перешкод з чарунки, при цьому нульовий пілот-сигнал передається UE, що приймає індикатор перешкод, щоб дозволити чарунці оцінювати некеровані перешкоди від UE, що не приймають індикатор перешкод. 44. Спосіб за п. 42, що додатково включає: прийом індикатора перешкод з чарунки, при цьому нульовий пілот-сигнал передається UE, що не приймає індикатор перешкод, щоб дозволити чарунці оцінювати керовані перешкоди від UE, що приймають індикатор перешкод. 45. Спосіб за п. 42, в якому зарезервовані ресурси призначаються для нульових пілот-сигналів для чарунок конкретного класу потужності, при цьому нульовий пілот-сигнал передається UE, що обслуговуються чарункою конкретного класу потужності, щоб дозволити чарунці оцінювати перешкоди через UE, що обслуговуються чарунками інших класів потужності. 46. Спосіб виконання оцінки перешкод в мережі бездротового зв'язку, що включає: визначення ресурсів, зарезервованих для нульових пілот-сигналів для деякої чарунки; прийом нульових пілот-сигналів з перших користувацьких терміналів (UE) в чарунці; і 7 96539 8 виконання оцінки перешкод, що спостерігаються чарункою з других UE, основуючись на нульових пілот-сигналах з перших UE. 47. Спосіб за п. 46, що додатково включає: відправлення індикатора перешкод з чарунки, при цьому нульові пілот-сигнали передаються першими UE, що приймають індикатор перешкод, щоб дозволити чарунці оцінювати некеровані перешкоди з других UE, що не приймають індикатор перешкод. 48. Спосіб за п. 46, що додатково включає: відправлення індикатора перешкод з чарунки, при цьому нульові пілот-сигнали передаються перши ми UE, що не приймають індикатор перешкод, щоб дозволити чарунці оцінювати керовані перешкоди з других UE, що приймають індикатор перешкод. 49. Спосіб за п. 46, в якому зарезервовані ресурси призначаються для нульових пілот-сигналів для чарунок конкретного класу потужності, при цьому нульові пілот-сигнали передаються першими UE, що обслуговуються чарункою конкретного класу потужності, щоб дозволити чарунці оцінювати перешкоди через другі UE, що обслуговуються чарунками інших класів потужності. Дана заявка вимагає пріоритет попередньої заявки США № 61/047063, озаглавленої "INTERACTIONS OF RESOURCE UTILIZATION MESSAGES (RUM) AND OTHER SECTOR INTERFERENCE (OSI) INDICATIONS", поданої 22 квітня 2008p., і попередньої заявки США № 61/108429, озаглавленої "OUT-OF-CLUSTER INTERFERENCE ESTIMATION AND CLUSTER NULL PILOTS", поданої 24 жовтня 2008p., обидві з яких переуступлені правонаступнику даного винаходу і включені в цей документ за допомогою посилання. Даний винахід належить до бездротового зв'язку, більш конкретно, до методів оцінки перешкод в мережі бездротового зв'язку. Мережі бездротового зв'язку широко використовуються для надання різного комунікаційного контенту, такого як мова, відео, пакетні дані, передача повідомлень, широкомовлення і т. д. Ці бездротові мережі можуть бути мережами множинного доступу, здатними підтримувати численних користувачів за допомогою спільного використання доступних системних ресурсів. Приклади таких мереж множинного доступу включають в себе мережі множинного доступу з кодовим розділенням (CDMA), мережі множинного доступу з часовим розділенням (TDMA), мережі множинного доступу з частотним розділенням (FDMA) і мережі ортогонального FDMA (OFDMA) і мереж FDMA з однією несучою (SC-FDMA). Мережі бездротового зв'язку можуть включати в себе декілька базових станцій, які можуть підтримувати зв'язок для декількох користувацьких терміналів (UE). Користувацький термінал (UE) може встановлювати зв'язок з базовою станцією через низхідну лінію зв'язку і висхідну лінію зв'язку. Низхідна (або пряма) лінія зв'язку належить до лінії зв'язку від базової станції до UE, а висхідна (або зворотна) лінія зв'язку належить до лінії зв'язку від UE до базової станції. Користувацький термінал може виявляти численні чарунки в мережі бездротового зв'язку, де термін "чарунка" (стільник) може належати до підсистеми базової станції або до її зони обслуговування в залежності від контексту, в якому використовується цей термін. Для обслуговування користувацького термінала може бути вибрана одна чарунка, яка може згадуватися як обслуговуюча чарунка. Альтернативно, в спільній багатоточковій системі (СоМР) для обслуговування UE може бути вибраний кластер чарунок, який може згадуватися як обслуговуючий кластер. Користувацький термінал може спостерігати перешкоди від інших чарунок (наприклад, чарунок не в його обслуговуючому кластері), і перешкоди можуть впливати на передачу даних з обслуговуючої чарунки або кластера в UE. Може бути бажаним мати можливість точної оцінки перешкод від інших чарунок, щоб поліпшити пропускну здатність передачі даних з обслуговуючої чарунки або кластера. У даному описі представлені методи для передачі нульових пілот-сигналів для підтримки виконання оцінки перешкод в мережі бездротового зв'язку. У низхідній лінії зв'язку пілот-сигнал являє собою пусту передачу на призначених частотночасових ресурсах чарункою або кластером чарунок. Кластер або чарунка можуть підтримувати спільну передачу в заданий UE, як описано нижче. Чарунки в кластері можуть передавати нульові пілот-сигнали. Прийнята потужність нульових пілот-сигналів з чарунок в кластері може бути показником перешкод від інших чарунок. Таким чином, нульові пілот-сигнали можуть дозволяти UE оцінювати позакластерні перешкоди, що містять перешкоди від чарунок, що не належать кластеру. Позакластерні перешкоди можуть бути використані для підтримки передачі даних в UE з кластера чарунок. У одному варіанті здійснення чарунка в кластері чарунок може визначати ресурси для передачі нульового пілот-сигналу чарункою. У одному варіанті здійснення кожній чарунці в кластері чарунок можуть бути привласнені різні ресурси для передачі нульового пілот-сигналу. У іншому варіанті здійснення всі чарунки в кластері можуть використовувати однакові ресурси для передачі нульових пілот-сигналів, і різним кластерам можуть бути привласнені різні ресурси для передачі нульових пілот-сигналів. У будь-якому випадку чарунка може передавати нульовий пілот-сигнал на ресурсах (тобто посилати пусті передачі), щоб дозволити UE оцінювати позакластерні перешкоди. Чарунка може приймати інформацію про перешкоди і інформацію про канал від UE. Інформація про переш 9 коди може бути показником позакластерних перешкод, що спостерігаються UE, і може задаватися в різних формах, як описано вище. Чарунка може виконувати передачу даних в UE, основуючись на інформації про перешкоди і/або канал. Інші чарунки в кластері можуть знижувати перешкоди для UE, наприклад, за допомогою спрямування їх передач подалі від UE і/або за допомогою зниження їх потужності передачі. У одному варіанті здійснення UE може визначати ресурси, що використовуються для передачі нульових пілот-сигналів численними чарунками в кластері чарунок. Користувацький термінал може приймати пілот-сигнали з численних чарунок на ресурсах, що використовуються для передачі нульових пілот-сигналів. Користувацький термінал може оцінювати позакластерні перешкоди, що спостерігаються, UE, основуючись на нульових пілот-сигналах, і може визначати інформацію про перешкоди. Користувацький термінал також може визначати інформацію про канали щонайменше для однієї потенційної обслуговуючої чарунки в кластері. Користувацький термінал може передавати інформацію про перешкоди і інформацію про канал щонайменше в одну призначену чарунку в кластері. Потім UE може приймати передачу даних, що передається щонайменше однією обслуговуючою чарункою в кластері, основуючись на інформації про перешкоди і/або про канал з UE. Різні аспекти і ознаки винаходу описані більш детально нижче. Надалі винахід пояснюється описом конкретних варіантів його здійснення з посиланнями на креслення, на яких: фіг. 1 - мережа бездротового зв'язку, фіг. 2 - численні кластери чарунок, фіг. 3 - ілюстративна передача нульових пілотсигналів чарунки, фіг. 4 - ілюстративна передача нульових пілотсигналів кластера, фіг. 5 - процес передачі нульового пілотсигналу чарункою, фіг. 6 - пристрій для передачі нульового пілотсигналу, фіг. 7 - процес прийому нульових пілотсигналів UE, фіг. 8 - пристрій для прийому нульових пілотсигналів, фіг. 9 - компонування базової станції і UE. Докладний опис переважних варіантів здійснення Різні описані тут методи можуть бути використані для різних мереж бездротового зв'язку, таких як CDMA, TDMA, FDMA, OFDMA, SC-FDMA і інших мереж. Терміни "система" і "мережа" часто використовуються взаємозамінно. Мережа CDMA може реалізувати радіотехнологію, таку як універсальний наземний радіодоступ (UTRA), CDMA2000 і т. п. UTRA включає в себе широкосмуговий CDMA (W-CDMA) і інші варіанти CDMA. Крім того, CDMA2000 охоплює стандарти IS-2000,IS-95 і IS856. Мережа TDMA може реалізувати радіотехнологію, таку як глобальна система мобільного зв'язку (GSM). Мережа OFDMA може реалізувати технологію радіозв'язку, таку як розвинений UTRA (E 96539 10 UTRA), надмобільний широкосмуговий зв'язок (UMB), IEEE802.11 (Wi-Fi), IEEE802.16 (WiMAX), IEEE802.20,Flash-OFDM® і т. п. UTRA і E-UTRA є частиною універсальної системи мобільного зв'язку (UMTS). Довгостроковий розвиток (LTE) і прогресивний довгостроковий розвиток (LTE-A) проекту 3GPP є новими версіями UMTS системи, які використовують E-UTRA.UTRA, E-UTRA, UMTS, LTE, LTE-A і GSM описані в документах організації, яка називається Проект партнерства третього покоління (3GPP). Cdma2000 і UMB описані в документах організації, яка називається Проект 2 партнерства третього покоління (3GPP2). Технології радіозв'язку, описані тут, можуть бути використані для бездротових мереж і вищезазначених технологій радіозв'язку, а також для інших бездротових мереж і технологій радіозв'язку. Фіг. 1 зображає мережу 100 бездротового зв'язку з численними базовими станціями 110. Базовою станцією може бути станція, яка встановлює зв'язок з UE і також може згадуватися як вузол В, розвинений вузол В (eNB) або точка доступу і т. п. Кожна базова станція 110 забезпечує охоплення зв'язком для конкретної географічної зони. У проекті 3GPP термін "чарунка" може належати до зони обслуговування базової станції і/або до підсистеми базових станцій, яка обслуговує цю зону обслуговування, в залежності від контексту, в якому використовується цей термін. У проекті 3GPP термін "сектор" або "чарунка-сектор" може належати до зони обслуговування базової станції і/або до підсистеми базових станцій, яка обслуговує цю зону обслуговування. Для ясності, нижче в описі використовується 3GPP концепція "чарунки". Базова станція може підтримувати одну або багато чарунок (наприклад, три). Базова станція забезпечує зону обслуговування для макрочарунки, пікочарунки, фемточарунки і/або чарунок інших типів. Макрочарунка може охоплювати відносно велику географічну зону (наприклад, в радіусі декілька кілометрів) і може забезпечити можливість необмеженого доступу UE з підпискою послуги. Пікочарунка може охоплювати відносно малу географічну зону (наприклад, будинок) і може забезпечити можливість обмеженого доступу UE, що мають асоціацію з фемточарункою (наприклад, UE для користувачів в будинку). Різні типи чарунок можуть мати різні рівні потужності передачі, наприклад, 20 Вт для макрочарунок і 1 Вт для піко- і фемточарунок. Бездротова мережа 100 також може включати в себе ретрансляційні станції. Ретрансляційна станція являє собою станцію, яка приймає передачу даних і/або іншу інформацію від попередньої станції (наприклад, базової станції або UE) і посилає передачу даних і/або іншу інформацію в подальшу станцію (наприклад, UE або базову станцію). Ретрансляційною станцією також може бути UE, який пересилає передачі для інших UE. Мережевий контролер 130 може бути пов'язаний з набором базових станцій і забезпечує координацію і керування для цих базових станцій. Мережевий контролер 130 може встановлювати зв'язок з базовими станціями 110 через зворотний зв'язок. Базові станції110 також можуть встанов 11 лювати зв'язок один з одним, наприклад, прямо або опосередковано через бездротовий або дротовий зворотний зв'язок. Користувацькі термінали UE120 розосереджені по бездротовій мережі 100, і кожний UE може бути стаціонарним або мобільним. Термін "користувацький термінал" також може належати до термінала, мобільної станції, абонентського пристрою, станції і т. п. Користувацьким терміналом також може бути стільниковий телефон, персональний цифровий секретар (PDA), бездротовий модем, дорожній комп'ютер або настільний ПК, радіотелефон, станція бездротової місцевої лінії (WLL) і т. д. На фіг. 1 суцільна лінія з однією стрілкою показує бажану передачу даних з обслуговуючої чарунки в UE, і пунктирна лінія з однією стрілкою показує заважаючу передачу з необслуговуючої чарунки в UE. Обслуговуюча чарунка являє собою чарунку, призначену для обслуговування UE на низхідній лінії зв'язку і/або висхідній лінії зв'язку. Передачі висхідної лінії зв'язку не показані на фіг. 1 для простоти. Бездротова мережа 100 може підтримувати спільну передачу на низхідній лінії зв'язку, щоб поліпшити пропускну здатність. Спільна передача також може згадуватися як спільна багатоточкова (СоМР), мережева з множиною входів і множиною виходів (МІМО), розподілений МІМО і т. д. При спільній передачі декілька чарунок можуть взаємодіяти одна з одною для обслуговування одного або декількох UE. Різні форми спільної передачі можуть підтримуватися або включати в себе перехресне спільне використання пакетів (ISPS), спільне формування променя (СВ), спільне усунення шуму (CS) і т. п. Для ISPS, численні чарунки (одних і тих же або різних базових станцій) можуть посилати пакет в один UE. Кожна чарунка може посилати передачу даних в UE, основуючись на інформації попереднього кодування, яка задається UE для цієї чарунки. Для СВ, чарунка може посилати передачу даних з матрицею попереднього кодування, вибраною для керування передачею даних в напрямку до обслуговуваного UE і подалі від заважаючого UE в сусідній чарунці, щоб знизити перешкоди заважаючого UE. Для CS, чарунка може знижувати свою потужність передачі (можливо до нуля), щоб знизити перешкоди заважаючого UE. Взагалі кажучи, кластер являє собою набір чарунок. Для спільної передачі кластер може включати в себе чарунки, які можуть взаємодіяти одна з одною, щоб обслуговувати один або декілька UE. Наприклад, на фіг. 1 кластер трьох чарунок 1,2 і 3 може взаємодіяти для обслуговування UE120. Інші термінали на фіг. 1 можуть обслуговуватися тим же кластером або різними кластерами чарунок. Фіг. 2 зображає приклад численних кластерів чарунок. У цьому прикладі кластер А включає в себе чарунки A1,A2 і A3, кластер В включають в себе чарунки В1, В2 і т. п., кластер С включає в себе чарунки С1, С2, С3 і т. п., кластер D включає в себе чарунки D1,D2,D3 і т. п., кластер Е включає в себе чарунки Е1 і т. п. Кожний кластер чарунок може обслуговувати термінали, розташовані всередині зони обслуговування цих чарунок. 96539 12 Взагалі кажучи, кластер може включати в себе будь-яке число чарунок. Різні кластери можуть включати в себе однакове число чарунок (не показано на фіг. 2) або різне число чарунок (як показано на фіг. 2). У одному варіанті здійснення кластери можуть бути такими, що не перекриваються, і кожна чарунка може належати тільки одному кластеру, наприклад, як показано на фіг. 2. У іншому варіанті здійснення кластери можуть бути такими, що перекриваються, і задана чарунка може належати одному або численним кластерам. Кластери можуть бути задані в статичній, напівстатичній або динамічній формі. У одному варіанті здійснення кластери можуть бути задані в статичній формі, і кожний UE обслуговується чарункою в кластері, що охоплює місцеположення UE. У іншому варіанті здійснення кластери можуть бути задані в динамічній формі. Кожний UE обслуговується кластером чарунок, що виявляються UE з достатнім рівнем сигналу, що приймається. Кластери також можуть задаватися в інших формах. Різні UE можуть асоціюватися з різними кластерами чарунок, які можуть обслуговувати ці UE. Для підтримки спільної передачі з кластера чарунок в UE можуть бути використані різні типи інформації, які можуть включати в себе (і) інформацію про канал для кожної потенційної обслуговуючої чарунки в кластері і (іі) інформацію про перешкоди, показову для позакластерних перешкод, що спостерігаються UE. Інформація про канал і інформація про перешкоди може бути використана для планування UE для передачі даних, для вибору прийнятної швидкості передачі для UE і для передачі даних в UE. Термін швидкість передачі також може згадуватися як схема модуляції або кодування (MCS), транспортний формат, пакетний формат і т. д. У одному аспекті нульові пілот-сигнали можуть бути використані для підтримки оцінки позакластерних перешкод UE. Нульові пілот-сигнали можуть посилатися чарунками на призначених частотно-часових ресурсах, які можуть згадуватися як ресурси нульових пілот-сигналів. Ресурси нульових пілот-сигналів можуть задаватися в різних формах. Фіг. 3 зображає ілюстративну передачу нульових пілот-сигналів чарунки для підтримки оцінки позакластерних перешкод. Нульовий пілот-сигнал чарунки являє собою пусту передачу на частотночасових ресурсах, привласнених чарунці. На фіг. 3 горизонтальна вісь для кожної чарунки представляє час, і вертикальна вісь представляє частоту. Кожна чарунка передає свій нульовий пілот-сигнал на своєму нульовому контрольному ресурсі в кожному нульовому контрольному інтервалі, який може мати будь-яку відповідну тривалість часу. Як показано на фіг. 3, різним чарункам можуть бути привласнені різні частотно-часові ресурси для нульових пілот-сигналів, і, таким чином, вони можуть бути асоційовані з різними ресурсами нульових пілот-сигналів. Ресурси нульових пілот-сигналів для даної чарунки можуть бути задані, основуючись на одному або декількох параметрах, характерних для чарунки, таких як ідентифікатор чарунки (ID). Кожній 13 чарунці можуть бути привласнені ресурси, які (і) можуть бути такими, що не перекриваються з ресурсами нульових пілот-сигналів сусідніх чарунок або (іі) можуть перекриватися з ресурсами нульових пілот-сигналів сусідніх чарунок як можна менше. У одному варіанті здійснення ресурси нульових пілот-сигналів для даної чарунки можуть вибиратися, основуючись на функції стрибкоподібної перебудови, яка може вибирати різні частотно-часові ресурси по частотній області, для досягнення частотного рознесення і для рандомізації конфлікту з ресурсами нульових пілот-сигналів сусідніх чарунок. У іншому варіанті здійснення кожній чарунці можуть бути привласнені статичні частотно-часові ресурси для її нульового пілотсигналу. Ресурси нульових пілот-сигналів для кожної чарунки також можуть бути задані іншими способами. Чарунка може посилати нульовий пілот-сигнал на своїх ресурсах нульового пілот-сигналу різними способами. У першому варіанті здійснення чарунка може просто нічого не передавати на своїх ресурсах нульових пілот-сигналів, які зарезервовані для нульового пілот-сигналу і не привласнюються іншим передачам. У другому варіанті здійснення чарунка може проколювати (або видаляти) будьяку передачу даних, керування і/або пілот-сигналу, що відображається на ресурси нульових пілотсигналів. Пілот-сигнал являє собою відому передачу або може згадуватися як опорний сигнал, тренування і т. п. В третьому варіанті здійснення чарунка може "завертати" передачу даних, керування і/або пілот-сигналу навколо ресурсів (тобто охоплювати ресурси) нульового пілот-сигналу. У цьому варіанті здійснення чарунка може зберігати дані, керування і/або пілот-символи, що відображаються на ресурси нульових пілот-сигналів, і може повторно відображати ці символи на наступні доступні ресурси для цих передач даних, керування і/або пілот-сигналу. Для другого і третього варіантів здійснення ресурси нульових пілот-сигналів спеціально не резервуються для нульового пілотсигналу і можуть просто замінювати ресурси, що використовуються для даних, керування і/або пілот-сигналу. Бланкування передачі на ресурсах нульових пілот-сигналів також може бути досягнуто іншими способами. Інші чарунки не бланкують ресурси нульових пілот-сигналів цієї чарунки і можуть посилати свої передачі на цих ресурсах. Фіг. 4 зображає ілюстративну передачу нульових пілот-сигналів кластера для підтримки оцінки позакластерних перешкод. Нульовий пілот-сигнал кластера являє собою пусту передачу на частотно-часових ресурсах, привласнених для кластера чарунок. Всі чарунки в кластері можуть використовувати однакові частотно-часові ресурси для своїх нульових пілот-сигналів і тоді можуть мати однакові ресурси нульових пілот-сигналів. Різним кластерам можуть бути привласнені різні частотночасові ресурси для їх нульових пілот-сигналів, і, таким чином, вони можуть бути асоційовані з різними ресурсами нульових пілот-сигналів. Ресурси нульових пілот-сигнал;в для даного кластера можуть бути задані, основуючись на одному або декількох параметрах, характерних для 96539 14 кластера, таких як ідентифікатор (ID) кластера. Кожному кластеру можуть бути привласнені ресурси нульових пілот-сигналів, які (і) можуть бути такими, що не перекриваються з ресурсами нульових пілот-сигналів сусідніх кластерів або (іі) можуть перекриватися з ресурсами нульових пілот-сигналів сусідніх кластерів як можна менше. У одному варіанті здійснення ресурси нульових пілот-сигналів для даної чарунки можуть вибиратися, основуючись на функції стрибкоподібного перестроювання, яка може вибирати різні частотночасові ресурси по частотній області. У іншому варіанті здійснення кожному кластеру можуть бути привласнені статичні частотно-часові ресурси для його нульових пілот-сигналів. Ресурси нульових пілот-сигналів для кожного кластера також можуть бути задані іншими способами. Кожна чарунка в кластері може посилати нульовий пілот-сигнал на ресурсах нульових пілотсигналів кластера різними способами. У першому варіанті здійснення кожна чарунка може просто нічого не передавати на ресурсах нульових пілотсигналів. У другому варіанті здійснення чарунка може переривати будь-яку передачу даних, керування і/або пілот-сигналу, що відображається на ресурси нульових пілот-сигналів. У третьому варіанті здійснення кожна чарунка може охоплювати своєю передачею даних, керування і/або пілотсигналу ресурси нульових пілот-сигналів. Придушення передачі на ресурсах нульових пілотсигналів також може бути досягнуте іншими способами. Чарунки в інших кластерах не придушують ресурси нульових пілот-сигналів згаданого кластера і можуть (і) посилати їх передачі на цих ресурсах або (іі) посилати спеціальні пілот-сигнали на цих ресурсах. Спеціальні пілот-сигнали можуть показувати рівень потужності передачі і/або напрямок променя майбутніх передач чарунками інших кластерів на ресурсах, асоційованих з ресурсами нульових пілот-сигналів. Ширина смуги системи може розділятися на піддіапазони, і кожний піддіапазон може охоплювати деякий діапазон частот, наприклад, 1,08 мегагерц (МГц) в LTE. Часова шкала передачі для кожної з низхідної лінії зв'язку і висхідної лінії зв'язку може розділятися на елементи субкадрів. Кожний субкадр має заздалегідь задану тривалість, наприклад, 1 мілісекунда (мс), і може включати в себе два часових інтервали. Доступні частотночасові ресурси для кожної лінії зв'язку можуть розділятися на блоки ресурсів. Кожний блок ресурсів може охоплювати конкретну часову або частотну розмірність, наприклад, 12 піднесучих в одному часовому інтервалі для LTE. Ресурси нульових пілот-сигналів для нульових пілот-сигналів чарунки і нульових пілот-сигналів даного кластера можуть бути задані з різними гранулярностями. У одному варіанті здійснення один набір ресурсів нульових пілот-сигналів може бути заданий для всіх субкадрів і всіх піддіапазонів. У цьому варіанті здійснення чарунка може передавати нульовий пілот-сигнал на специфічних частотно-часових ресурсах в субкадрі кожного нульового пілот-сигналу, який являє собою субкадр, в який посилається пілот-сигнал. У іншому варіанті здійс 15 96539 нення різні набори ресурсів нульових пілотсигналів можуть бути задані (і) для різних субкадрів і/або піддіапазопів або (іі) для різних груп субкадрів і/або піддіапазонів. Наприклад, чарунка може передавати численні нульові пілот-сигнали на різних блоках частотно-часових ресурсів в різних піддіапазонах субкадру заданого нульового пілотсигналу. Цей варіант здійснення може дозволити UE діставати окремі оцінки позакластерних перешкод для різних субкадрів і/або піддіапазонів і визначати якість прийнятого сигналу для специфічних ресурсів. Цей варіант здійснення також може забезпечити можливість більш ефективного розділення ресурсів між різними кластерами чарунок. Для обох варіантів здійснення ресурси нульових пілот-сигналів можуть варіюватися по частоті (наприклад, по піддіапазонах) і/або за часом (наприклад, по субкадрах) для досягнення рознесення. Ресурси нульових пілот-сигналів також можуть стрибкоподібно перестроюватися для досягнення частотного рознесення і для рандомізації конфлікту ресурсів нульових пілот-сигналів для різних чарунок або кластерів. Заданий UE може оцінювати позакластерні перешкоди, основуючись на нульових пілотсигналах чарунки, різними способами. Користувацький термінал може бути асоційований з кластером K чарунок, які можуть взаємодіяти для обслуговування UE, де K являє собою будь-яке значення більше одиниці. Кожна чарунка в кластеIOOC K рі може передавати нульовий пілот-сигнал чарунки на своїх ресурсах нульових пілот-сигналів. K чарунок в кластері можуть передавати свої нульові пілот-сигнали на різних ресурсах нульових пілотсигналів, наприклад, як показано на фіг. 3. У першому варіанті здійснення UE вимірює прийняту потужність Ik нульового пілот-сигналу чарунки з кожної чарунки в кластері, що може бути виражено як: Ik PRX, total PRX,k , для k=1,…, K, Рівн. (1) де PRX,k - прийнята потужність чарунки k на UE, PRX, total - повна прийнята потужність чарунки k на UE, Ik - прийнята на UE потужність всіх чарунок, за винятком чарунки k. Параметр Ik також може згадуватися як сумарні перешкоди на чарунку k на UE. Таким чином, нульовий пілот-сигнал з кожної чарунки може бути використаний для оцінки сумарних перешкод Ik зі всіх інших чарунок, що включають в себе чарунки в кластері. UE може отримувати K значень прийнятої потужності для нульових пілот-сигналів з K чарунок в кластері. UE також може вимірювати повну прийняту потужність на UE, основуючись на будь-якій відповідній передачі на будь-яких ресурсах. Потім UE може оцінювати позакластерні перешкоди таким чином: K k 1 16 k 1 Ik K 1 PRX,total PRX,total PRX,k , де IOOC - позакластерні перешкоди, що спостерігаються UE. Як показано в рівнянні (2), позакластерні перешкоди можуть включати в себе всю прийняту потужність на UE, за винятком прийнятих потужностей чарунок в кластері. UE може діставати оцінки позакластерних перешкод для різних ресурсів нульових пілот-сигналів і може фільтрувати/усереднювати ці оцінки за часом і/або частотою для отримання більш точної оцінки позакластерних перешкод. UE також може отримувати верхні межі позакластерних перешкод таким чином: 1 K IOOC min Ik Ik . Рівн. (3) K 1 k K k 1 Як показано в рівнянні (3), позакластерні перешкоди обмежуються мінімальним або середнім значенням прийнятої потужності нульових пілотIOOC I1 I2 I3 2 PRX,total PRX,total PRX,1 PRX,2 PRX,3 . У другому варіанті здійснення UE вимірює прийняту потужність Ik нульового пілот-сигналу чарунки з конкретною чарункою в кластері, як показано в рівнянні (1). UE також може вимірювати прийняту потужність PRX,k кожної з інших чарунок в кластері, наприклад, основуючись на передачі Рівн. (2) сигиалів чарунки з чарунок в кластері. У рівнянні (3) сумарні перешкоди Ik для кожної чарунки можуть замінюватися відфільтрованою/усередненою версією, як описано вище. Наприклад, як показано на фіг. 1,UЕ 120х може асоціюватися з кластером трьох чарунок 1,2 і 3.UE120х може вимірювати прийняту потужність нульового пілот-сигналу з кожної чарунки в кластері і може отримувати таким чином: I1 PRX, total PRX,1 , I2 PRX, total PRX,2 , і Рівн. (4) I3 PRX, total PRX,3 , UE120x також може вимірювати повну прийняту потужність PRX, total на UE. Потім UE120х оці нює позакластерні перешкоди таким чином: Рівн. (5) пілот-сигналу з чарунки. Потім UE дістає оцінку позакластерних перешкод для чарунки k таким чином: K IOOC,k Ik PRX,i , Рівн. (6) i 1,i k 17 96539 де IOOC,k являє собою оцінку позакластерних перешкод для чарунки k, основуючись на нульовому пілот-сигналі з чарунки k. UE вимірює прийняті потужності нульових пілот-сигналів чарунки з однієї або декількох чарунок в кластері і дістає оцінку позакластерних перешкод для коленої виміряної чарунки. UE може зберігати оцінки для виміряних чарунок з досить високою прийнятою потужністю і може відкидати інші оцінки позакластерних перешкод. Потім UE може фільтрувати/усереднювати оцінки позакластерних перешкод для деяких або всіх чарунок в кластері, щоб дістати більш точну оцінку позакластерних перешкод таким чином: Рівн. ( IOOC фільтрIOOC,1,...,IOOC,K , 7) де фільтром може бути будь-яка відповідна функція фільтрації/усереднення. UE також може фільтрувати оцінки позакластерних перешкод для різних ресурсів нульових пілот-сигналів за часом і/або по частоті для отримання більш точної оцінки позакластерних перешкод. Наприклад, як показано на фіг. 1,UE120х вимірює прийняту потужність нульового пілот-сигналу чарунки для кожної чарунки в кластері і отримує вимірювання, показані в ряді рівнянь (4). UE також може вимірювати прийняту потужність кожної чарунки в кластері і отримувати PRX,1 , PRX,2 і PRX,3 . Потім, UE120х дістає оцінку позакластерних перешкод для кожної чарунки в кластері таким чином: IOOC,1 PRX, total PRX,2 PRX,3 , IOOC,2 PRX,total PRX,1 PRX,3 , i Рівн. (8) IOOC,3 PRX,total PRX,1 PRX,2 , UE також може усереднювати оцінки позакластерних перешкод для трьох чарунок в кластері таким чином: IOOC IOOC,1 IOOC,2 IOOC,3 / 3 Рівн. (9) . UE120 також може фільтрувати оцінки позакластерних перешкод іншими способами. UE також може оцінювати позакластсрні перешкоди, основуючись на нульових пілот-сигналах чарунки, різними способами. UE може вибирати конкретне компонування або схему для оцінки позакластерних перешкод, основуючись на різних чинниках, таких як передачі, доступні для виконання вимірювань, надійність вимірювань для доступних передач і т. д. Наприклад, UE використовує перший варіант здійснення, описаний вище, якщо прийнята потужність Ik нульових пілот-сигналів з чарунок в кластері може надійно вимірюватися. Це може бути у випадку, якщо чарунки в кластері приймаються з порівнянним рівнем сигналу на UE.UE використовує другий варіант здійснення, описаний вище, якщо потужність перешкод Ik нульового пілот-сигналу з однієї конкретної чарунки, а також прийнята потужність Pk інших чарунок в кластері можуть надійно вимірюватися. Це може бути у випадку, якщо UE приймає сигнал більш 18 високого рівня з однієї чарунки в порівнянні з іншими чарунками в кластері. У одному варіанті здійснення UE оцінює прийняту потужність чарунки в кластері, основуючись на прийнятій потужності нульового пілот-сигналу чарунки з цієї чарунки, таким чином: PRX,k PRX, total Ik , Рівн. (10) де потужність PRX, total може бути виміряна UE, основуючись на будь-якій відповідній передачі на будь-яких ресурсах, і потужність Ik може бути виміряна UE, основуючись на нульовому пілотсигналі чарунки з чарунки k. В іншому варіанті здійснення прийнята потужність чарунки в кластері може бути оцінена, основуючись на опорному сигналі або нульовому пілот-сигналі, що передається чарункою на відомих частотно-часових ресурсах. Заданий UE може оцінювати позакластерні перешкоди, основуючись на нульових пілотсигналах кластера, різними способами. UE може бути асоційований з кластером чарунок, які можуть взаємодіяти для обслуговування UE. Кожна чарунка в кластері може передавати нульовий пілот-сигнал кластера на ресурсах нульових пілотсигналів для кластера, наприклад, як показано на фіг. 4.UE вимірює прийняту потужність PRX,null нульових пілот-сигналів кластера з чарунок в кластері. UE може використати цю прийняту потужність як оцінку позакластерних перешкод таким чином: IOOC PRX,null . Рівн. (11) UE може діставати оцінки позакластерних перешкод для різних ресурсів нульових пілотсигналів для кластера і може фільтрувати/усереднювати вказані оцінки для отримання більш точної оцінки позакластерних перешкод. UE також може оцінювати позакластерні перешкоди, основуючись на нульових пілот-сигналах кластера іншими способами. UE може бути обладнаний множиною (R) приймальних антен і може приймати передачу даних з обслуговуючої чарунки в кластері. Прийняті символи з множини приймальних антен на UE можуть бути виражені як: Рівн. (12) r HPs n Heff s n , де s являє собою вектор символів даних, що посилаються обслуговуючою чарункою в UE, Р являє собою матрицю попереднього кодування, що використовується обслуговуючою чарункою, Н являє собою матрицю каналів для каналу низхідної лінії зв'язку з обслуговуючої чарунки в UE, Heff HP являє собою ефективну матрицю каналів, r являє собою вектор прийнятих символів на UE, і n являє собою вектор шуму і перешкод на UE. Чарунки в кластері можуть взаємодіяти для передачі даних в UE. Обслуговуюча чарунка вибирає матрицю Р попереднього кодування, щоб направляти передачу даних до UE і подалі від інших UE, які могли б обслуговуватися іншими чарунка 19 ми в кластері. Інші чарунки в кластері можуть направляти свої передачі даних подалі від вказаного UE. Таким чином, вектор n включає в себе основну частину позакластерних перешкод, що спостерігаються UE. Для нульових пілот-сигналів кластера, наприклад, показаних на фіг. 4,UE оцінює вектор n перешкод, основуючись на прийнятих символах для нульових пілот-сигналів з чарунок в кластері. UE виводить коваріаційну матрицю R nn перешкод таким чином: Рівн. (13) R nn EnnH , де E означає операцію математичного очікування, і H означає ермітову або зв'язану перестановку. UE отримує різні вектора n перешкод для різних ресурсів нульових пілот-сигналів. UE обчислює векторний добуток кожного вектора n перешкод і усереднює векторні добутки всіх векторів перешкод для отримання коваріаційної матриці R nn перешкод. Для нульових пілот-сигналів чарунки, наприклад, показаної на фіг. 3,UE отримує прийнятий вектор rk для нульового пілот-сигналу з кожної чарунки к в кластері. UE обчислює векторний добуток rk r H для кожної чарунки, основуючись на її k прийнятому векторі. Потім UE обчислює R nn , основуючись на векторному добутку rk r H для всіх k чарунок в кластері, з використанням обчислення, аналогічного таким, показаним в рівнянні (2), (3) або (6). UE може послати коваріаційну матрицю R nn перешкод в мережу, наприклад, в обслуговуючу чарунку. У іншому варіанті здійснення UE посилає всі елементи R nn в мережу. Оскільки R nn являє собою матрицю R'R, UE може посилати 16 елементів Rnn для випадку, в якому R=4. У іншому варіанті здійснення UE стискає елементи Rnn і посилає стислі елементи. У ще одному варіанті здійснення UE виконує розкладання R nn на власні значення таким чином: Рівн. (14) RH Rnn EE , nn де Е являє собою унітарну матрицю власного вектора R nn , і являє собою діагональну матрицю власних значень R nn . Унітарна матриця Е характеризується властивістю EHE I , де І являє собою одиничну матри цю. Стовпці Е ортогональні один одному, і кожний стовпець має одиничну потужність. Т стовпців матриці Е згадуються як Т власних векторів. Т діагональних елементів матриці є власними значеннями, які представляють посилення потужності власних мод матриці R nn , і асоціюються з Т влас 96539 20 ними векторами матриці Е. UE може повідомити L найбільших власних значень і L власних векторів в мережу, де L може бути меншим R. Також UE може посилати коваріаційну матрицю R nn в мережу іншими способами. Мережа використовує коваріаційні матриці перешкод з вказаного UE і інших UE, щоб планувати UE для передачі даних, і щоб вибирати відповідні швидкості передачі даних для запланованих UE. UE може виконувати просторову обробку приймача, основуючись на методі мінімальної середньоквадратичної помилки (MMSE) або деяких інших методах виявлення для зниження позакластерних перешкод, що спостерігаються UE.UE може вивести матрицю М просторового фільтра, основуючись на MMSE методі, таким чином: 1 Рівн.(15) M DHH Heff Rnn HH , eff eff 1 1 де D diagHH Heff Rnn HH Heff . eff eff UE виконує просторову обробку в приймачі таким чином: Рівн. (16) ˆ s Mr ~ , n де s являє собою вектор виявлених символів ˆ для обслуговуючої чарунки, і ~ Mn являє собою вектор шуму і перешкод n після просторової обробки в приймачі. UE може посилати інформацію про перешкоди і/або інформацію про канал різними способами. У одному варіанті здійснення UE може вибрати схему просторової обробки в приймачі (наприклад, MMSE) так, щоб встановити на нульову позначку позакластерні перешкоди. UE може застосувати цю схему просторової обробки в приймачі на прийнятих символах з нульових пілот-сигналів і може отримати постпроцесорну інформацію про перешкоди, наприклад, постпроцесорний вектор перешкод ~ Mn . UE також може застосовувати схему n просторової обробки в приймачі на прийнятих пілот-символах з кожної потенційної обслуговуючої чарунки в кластері і може отримувати постпроцесорну інформацію про канал, наприклад, складову ~ матрицю каналів H MH для кожної потенційної обслуговуючої чарунки. UE посилає постпроцесорну інформацію про перешкоди і про канал в мережу. У іншому варіанті здійснення UE може вибрати схему просторової обробки в приймачі і повідомити про цю схему просторової обробки в приймачі. Також UE може посилати інформацію про перешкоди (наприклад, вектор n перешкод або коваріаційну матрицю R nn ) і необроблену інформацію про канал (наприклад, матрицю Н каналів кожної потенційної обслуговуючої чарунки) в мережу. Ще в одному варіанті здійснення схема просторової обробки в приймачі може бути заздалегідь задана і може передаватися окремо, наприклад, через повідомлення третього рівня (L3). UE може повідомляти тільки необроблену інформацію про перешкоди і необроблену інформацію про канал. 21 У одному варіанті здійснення мережа приймає інформацію про перешкоди і про канал, що повідомляється UE, і використовує інформацію, що повідомляється, для різних цілей, як, наприклад, для планування, вибору швидкості передачі даних і т. д. для UE. Мережа оцінює різні матриці попереднього кодування і вибирає матрицю попереднього кодування, яка може забезпечити хороші експлуатаційні показники. Мережа оцінює якість прийнятого сигналу на UE, основуючись на (і) інформації про перешкоди і про канал (наприклад, коваріаційної матриці R nn перешкод і матриці каналу Н), що повідомляється UE, (іі) матриці Р попереднього кодування, яка вибирається для обслуговуючої чарунки, і (ііі) схемі просторової обробки в приймачі, що використовується UE. Мережа може вибирати швидкість передачі даних для UE, основуючись на оціненій якості прийнятого сигналу на UE. Потім обслуговуюча чарунка посилає передачу даних з матрицею Р попереднього кодування на вибраній швидкості передачі даних в UE. У іншому варіанті здійснення мережа приймає інформацію про перешкоди і про канал з різних UE. Кожний UE повідомляє інформацію про перешкоди (наприклад, позакластерні перешкоди) і інформацію про канал (наприклад, матриця каналу) для кожної потенційної обслуговуючої чарунки. Мережа використовує інформацію про перешкоди і про канал з UE для різних цілей, як, наприклад, для планування, вибору швидкості передачі даних, виключення або зменшення перешкод, керування перешкодами і т. д. Наприклад, мережа використовує інформацію про перешкоди і про канал для оцінки різних можливих сценаріїв планування, які можуть досягати експлуатаційних показників. Кожний можливий сценарій планування може відповідати конкретному кластеру чарунок, які взаємодіють один з одним; конкретному типу взаємодії (наприклад, ISPS (спільне використання пакетів на місці/всередині сайту), СВ (спільне формування променя), CS (спільне усунення шуму) і т. д.); конкретному набору UE, що обслуговуються кластером чарунок; конкретному набору частотночасових ресурсів; і конкретному напрямку променя і конкретному рівню потужності передачі для кожної чарунки в кластері на вказаних частотночасових ресурсах. Виконання оцінки різних можливих сценаріїв планування основане на одному або декількох мережевих критеріях корисності, таких як повна швидкість передачі даних, рівнодоступність, вимоги якості обслуговування (QoS) і т. д. Оцінка може бути виконана, основуючись на інформації про перешкоди і про канал, що повідомляється UE в мережу. Таким чином, інформація про перешкоди і про канал дає можливість мережі поліпшувати експлуатаційні показники для спільної передачі, коли кластери чарунок і/або стратегія для обслуговування UE невідомі на UE. Описані тут нульові пілот-сигнали можуть бути використані для оцінки позакластерних перешкод, як описано вище. Нульові пілот-сигнали також можуть бути використані для інших цілей, як, наприклад, для виконання оцінки позакластерних пере 96539 22 шкод, що містять перешкоди, що спостерігаються чарункою, від інших чарунок. У одному варіанті здійснення нульові пілотсигнали можуть бути використані для оцінки керованих або некерованих перешкод на висхідній лінії зв'язку. Дана чарунка визначає індикатори перешкод, що характеризують перешкоди, які спостерігаються чарункою, і посилає індикатори перешкод в заважаючі UE в сусідніх чарунках. Деякі UE можуть приймати/слідувати вказівкам індикаторів перешкод і відповідно регулювати свою потужність передачі. Потім вказані UE зумовлюють "керовані" перешкоди в чарунці. Інші UE можуть відхиляти/ігнорувати індикатори перешкод, і ці UE зумовлюють "некеровані" перешкоди в чарунці. Таким чином, терміни "керовані" і "некеровані" належать до здатності чарунки керувати перешкодами через індикатори перешкод. Сумарні перешкоди в чарунці можуть включати в себе і керовані перешкоди від UE, що приймають індикатори перешкод, і некеровані перешкоди від UE, що відхиляють індикатори перешкод. Щоб дозволити чарунці розрізнити керовані і некеровані перешкоди, UE, які приймають індикатори перешкод з чарунки, посилають пусті передачі на ресурсах нульових пілот-сигналів для вказаної чарунки. Термінали користувача, які відхиляють індикатори перешкод, можуть виконувати передачу на ресурсах нульових пілотсигналів звичайним способом. Чарунка оцінює некеровані перешкоди за допомогою вимірювання прийнятої потужності ресурсів нульових пілотсигналів. Чарунка оцінює сумарні перешкоди за допомогою вимірювання прийнятої потужності інших ресурсів. Чарунка визначає керовані перешкоди за допомогою віднімання некерованих перешкод з сумарних перешкод. У іншому варіанті здійснення нульові пілотсигнали можуть бути використані для розрізнення між перешкодами з UE, що обслуговуються чарунками різних класів потужності. Наприклад, для чарунок різних класів потужності можуть бути зарезервовані різні ресурси нульових пілот-сигналів. UE, що обслуговуються чарунками заданого класу потужності X (наприклад, макрочарунками високого класу потужності), можуть уникати передачі на ресурсах нульових пілот-сигналів для класу потужності X.UE, що обслуговуються чарунками інших класів потужності (наприклад, піко- або фемточарунками низького класу потужності), можуть виконувати передачу на ресурсах нульових пілотсигналів для класу потужності X. Потім, перешкоди через UE, що обслуговуються чарунками інших класів потужності, визначаються, основуючись на прийнятій потужності ресурсів нульових пілотсигналів для класу потужності X. Фіг. 5 зображає структурну схему процесу 500 передачі нульового пілот-сигналу в мережі бездротового зв'язку. Процес 500 може бути виконаний чарункою (як описано нижче) або яким-небудь іншим логічним об'єктом. Чарунка може належати деякому кластеру чарунок і може визначати ресурси для передачі нульового пілот-сигналу чарункою (блок 512). У одному варіанті здійснення кожній чарунці в кластері чарунок можуть бути 23 привласнені різні ресурси для передачі нульового пілот-сигналу, наприклад, як показано на фіг. 3. У іншому варіанті здійснення, всі чарунки в кластері можуть використовувати однакові ресурси для передачі нульових пілот-сигналів, і різним кластерам можуть бути привласнені різні ресурси для передачі нульових пілот-сигналів, наприклад, як показано на фіг. 4. Чарунка може визначати ресурси для передачі нульового пілот-сигналу, основуючись на функції ідентифікатора (ID) чарунки або кластера. Функція може містити функцію стрибкоподібного перестроювання, яка вибирає різні ресурси (по частотній і/або часовій області) для передачі нульового пілот-сигналу. Чарунка передає нульовий пілот-сигнал на ресурсах, щоб дозволити UE оцінювати позакластерні перешкоди, що містять перешкоди від чарунок, що не належать їх кластеру (блок 514). Чарунка передає нульовий пілот-сигнал за допомогою пустих передач на ресурсах. У одному варіанті здійснення чарунка перериває символи, що відображаються на ресурси. У іншому варіанті здійснення чарунка визначає символи, що відображаються на ресурси, і чарунка повторно відображає ці символи на інші ресурси, доступні для цих символів. Чарунка приймає інформацію про перешкоди, яка характеризує позакластерні перешкоди, що спостерігаються UE (блок 516). Інформація про перешкоди містить потужність IOOC позакластерних перешкод на UE, коваріаційну матрицю R nn позакластерних перешкод, прийняті позакластерні перешкоди її перед просторовою обробкою в приймачі на UE і постпроцесорі позакластерні пе~ решкоди n після просторової обробки в приймачі на UE, і/або іншу інформацію. Чарунка також приймає інформацію про канал для цієї чарунки, можливо, для інших чарунок в кластері з UE (блок 518). Планувальник для чарунки визначає, чи планувати UE для передачі даних, основуючись на інформації про перешкоди і/або інформацію про канал з вказаного UE і інших UE. Чарунка посилає передачу даних в UE, основуючись на інформації про перешкоди і/або інформацію про канал з вказаного UE (блок 520). Чарунка оцінює якість прийнятого сигналу на UE, основуючись на інформації про перешкоди з UE, і визначає швидкість передачі, основуючись на оціненій якості прийнятого сигналу. Чарунка визначає матрицю попереднього кодування, основуючись на інформації про канал з UE. Чарунка посилає передачу даних з матрицею попереднього кодування і на певній швидкості передачі даних в UE. Кожна з інших чарунок в кластері знижує перешкоди на UE, наприклад, за допомогою напрямку їх передачі подалі від UE і/або за допомогою зниження їх потужності передачі. Фіг. 6 зображає структурну схему пристрою 600 для передачі нульового пілот-сигналу в мережі бездротового зв'язку. Пристрій 600 включає в себе модуль 612 для визначення ресурсів для передачі нульового пілот-сигналу чарункою в кластері чарунок; модуль 614 для передачі нульового пілот-сигналу на цих ресурсах чарункою, щоб дозволити UE оцінювати позакластерні перешкоди; 96539 24 модуль 616 для прийому інформації про перешкоди, показової для позакластерних перешкод, що спостерігаються UE; модуль 618 для прийому інформації про канал для чарунки з UE; і модуль 620 для передачі даних в UE, основуючись на інформації про перешкоди і/або інформацію про канал з UE. Фіг. 7 зображає структурну схему процесу 700 прийому нульових пілот-сигналів в мережі бездротового зв'язку. Процес 700 може бути виконаний UE (як описано нижче) або яким-небудь іншим логічним об'єктом. UE визначає ресурси, що використовуються для передачі нульових пілотсигналів численними чарунками (блок 712). У одному варіанті здійснення кожній чарунці в кластері чарунок можуть бути привласнені різні ресурси для передачі нульового пілот-сигналу. У іншому варіанті здійснення всі чарунки в кластері можуть використовувати однакові ресурси для передачі нульових пілот-сигналів, і різним кластерам можуть бути привласнені різні ресурси для передачі нульових пілот-сигналів. UE може визначати (і) ресурси, що використовуються кожною чарункою, основуючись на ідентичності (ID) чарунки, або (іі) ресурси, що використовуються всіма чарунками кластера, основуючись на ідентичності (ID) кластера. У будь-якому випадку UE приймає нульові пілот-сигнали з численних чарунок на ресурсах, що використовуються для передачі нульових пілот-сигналів (блок 714). UE оцінює позакластерні перешкоди, що спостерігаються UE, основуючись на нульових пілотсигналах з численних чарунок (блок 716). У одному варіанті здійснення UE визначає прийняту потужність Ik нульового пілот-сигналу з кожної чарунки в кластері і визначає повну прийняту потужність PRX, total на UE. Потім UE оцінює позакластерні перешкоди IOOC , основуючись на прийнятих потужностях нульових пілот-сигналів з всіх чарунок в кластері і повній прийнятій потужності на UE, наприклад, як показано в рівнянні (2). У іншому варіанті здійснення UE визначає прийняту потужності PRX,k кожної чарунки в кластері і визначає прийняту потужність Ik нульового пілотсигналу з кожної зі щонайменше однієї чарунки в кластері. Потім UE оцінює позакластерні перешкоди IOOC,k і IOOC , основуючись на прийнятій потужності кожної чарунки в кластері і прийнятій потужності нульового пілот-сигналу з кожної зі щонайменше однієї чарунки в кластері, наприклад, як показано в рівняннях (6) і (7). Ще в одному варіанті здійснення UE визначає прийняту потужність PRX,null нульових пілот-сигналів зі всіх чарунок в кластері і оцінює позакластерні перешкоди, основуючись на цій прийнятій потужності PRX,null , наприклад, як показано в рівнянні (11). У одному варіанті здійснення UE визначає повну прийняту потужність PRX, total на UE і визначає прийняту потужність Ik нульового пілотсигналу з деякої чарунки в кластері. Потім UE ви 25 значає прийняту потужність PRX,k чарунки, основуючись на повній прийнятій потужності на UE і прийнятій потужності нульового пілот-сигналу з чарунці, наприклад, як показано в рівнянні (10). Також UE може використовувати нульові пілотсигнали для інших вимірювань. UE може бути оснащений множиною приймальних антен. У одному варіанті здійснення UE визначає коваріаційну матрицю R nn позакластерних перешкод, наприклад, як показано в рівнянні (13). Ще в одному варіанті здійснення UE визначає матрицю М просторового фільтра, основуючись на позакластерних перешкодах, наприклад, як показано в рівнянні (15). Потім UE застосовує матрицю просторового фільтра до позакластерних переш~ код для отримання позакластерних перешкод n з подальшою обробкою, наприклад, як показано в рівнянні (16). UE визначає інформацію про перешкоди, показову для позакластерних перешкод (блок 718). Інформація про перешкоди містить потужність IOOC позакластерних перешкод, коваріаційну матрицю R nn позакластерних перешкод, прийняті позакластерні перешкоди n, постпроцесорні поза~ кластерні перешкоди n і/або іншу інформацію. UE також визначає інформацію про канал щонайменше для однієї потенційної обслуговуючої чарунки в кластері (блок 720). Інформація про канал для кожної потенційної обслуговуючої чарунки містить ~ матрицю Н каналів, складову матрицю H каналу для чарунки з просторовою обробкою в приймачі на UE і т. п. UE відправляє інформацію про перешкоди і інформацію про канал щонайменше в одну призначену чарунку (наприклад, обслуговуючу чарунку) в кластері (блок 722). Після цього UE приймає передачу даних, що відправляється щонайменше однією обслуговуючою чарункою в кластері, основуючись на інформації про перешкоди і/або інформації про канал з UE (блок 724). Наприклад, передача даних може посилатися з матрицею попереднього кодування, основуючись на інформації про канал, і на швидкості передачі даних, що визначається, основуючись на інформації про перешкоди з UE. Для спільної передачі кожна з інших чарунок в кластері знижує перешкоди на UE. Фіг. 8 зображає структурну схему пристрою 800 для прийому нульових пілот-сигналів в мережі бездротового зв'язку. Пристрій 800 включає в себе модуль 812 для визначення ресурсів, що використовуються для передачі нульових пілот-сигналів численними чарунками в кластері чарунок; модуль 814 для прийому нульових пілот-сигналів з численних чарунок на ресурсах, що використовуються для передачі нульових пілот-сигналів; модуль 816 для оцінки позакластерних перешкод, що спостерігаються UE, основуючись на нульових пілотсигналах з численних чарунок; модуль 818 для визначення інформації про перешкоди, показової для позакластерних перешкод; модуль 820 для визначення інформації про канал щонайменше для однієї потенційної обслуговуючої чарунки в кластері; модуль 822 для передачі інформації про 96539 26 перешкоди і інформацію про канал щонайменше в одну призначену чарунку в кластері; і модуль 824 для прийому передачі даних, що посилається щонайменше однією обслуговуючою чарункою в кластері, основуючись на інформації про перешкоди і/або інформацію з UE. Модулі на фіг. 6 і 8 можуть містити процесори, електронні пристрої, пристрої апаратних засобів, електронні компоненти, логічні схеми, запам'ятовуючі пристрої, коди програмного забезпечення і т. п., або будь-яку їх комбінацію. Фіг. 9 зображає блок-схему базової станції 110 і UE120, які можуть бути однією з базових станцій і одним з UE по фіг. 1. Базова станція 110 підтримує одну або декілька чарунок. Базова станція 110 може бути обладнана Т антенами 934а-934t, і UE може бути обладнаний антенами 952а-952r, де в основному Т1 і R1. На базовій станції 110 процесор 920 передачі даних приймає дані для одного або декількох UE з джерела 912 даних, обробляє дані (наприклад, кодує, перемежовує і відображає символи) і забезпечує символи даних для всіх UE. Також процесор 920 передачі даних обробляє інформацію керування з контролера/процесора 940 і забезпечує символи керування. Також процесор 920 передачі даних генерує пілот-символи для пілотсигналу або опорного сигналу і також може посилати пусті передачі на ресурсах, що використовуються для нульового пілот-сигналу для кожної чарунки, що підтримується базовою станцією 110. Процесор 930 передачі (ТХ) МІМО виконує попереднє кодування на символах даних для кожного UE, основуючись на матриці Р попереднього кодування, вибираної для UE. Процесор 930 забезпечує подачу Т вихідних потоків символів в модулятори 932a-932t. Кожний модулятор 932 обробляє вихідний потік символів (наприклад, для OFDM, CDMA і т. д.) для отримання вихідного потоку вибірок. Кожний модулятор 932 також обробляє (наприклад, перетворює в аналогову форму, посилює, фільтрує і перетворює з підвищенням частоти) вихідний потік символів для отримання сигналу низхідної лінії зв'язку. Т сигналів низхідної лінії зв'язку з модуляторів 932a-932t передаються через Т антен 934a-934t, відповідно. У UE антени 952а-952r приймають сигнали низхідної лінії зв'язку з базової станції 110 і забезпечують подачу прийнятих сигналів ь демодулятори 954а-954r, відповідно. Кожний демодулятор 954 обробляє (наприклад, фільтрує, посилює, перетворює з пониженням частоти і перетворює в цифрову форму) відповідний прийнятий сигнал для отримання вихідних вибірок. Кожний демодулятор 954 також обробляє вхідні вибірки (наприклад, для OFDM, CDMA і т. д.) для отримання прийнятих символів. МІМО детектор 956 отримує прийняті символи з всіх R демодуляторів 954а-954r, виконує просторову обробку в приймачі на прийнятих символах, якщо вони придатні, наприклад, як показано в рівнянні (16), і забезпечує детектовані символи. Процесор 958 прийому обробляє (наприклад, демодулює, виконує зворотне перемежовування і декодує) детектовані символи, забезпечує подачу декодованих даних для UE120 в приймач 27 960 даних, забезпечує подачу декодованої інформації керування в контролер/процесори 980. У висхідній лінії зв'язку, в UE120, процесор 964 передачі даних приймає і обробляє дані з джерела 962 даних і інформацію зворотного зв'язку (наприклад, інформацію про перешкоди, інформацію про канал і т. п.) з контролера/процесора 980. Процесор 964 передачі також генерує пілот-символи. Символи з процесора 964 передачі можуть при необхідності заздалегідь кодуватися процесором 966 ТХ МІМО, додатково оброблятися модуляторами 954а-954r і передаватися до базової станції 110. У базовій станції 110 сигнали висхідної лінії зв'язку з UE120 приймаються антенами 934, обробляються демодуляторами 932, при необхідності детектуються МІМО детектором 936 і додатково обробляються процесором 938 прийому для отримання декодованих даних і інформації зворотного зв'язку, що передасться UE120. Контролери/процесор 940 і 960 направляють роботу базової станції 110 і термінала 120, відповідно. Процесор 940 і/або інші процесори і модулі на базовій станції 110 виконують або направляють процес 500 на фіг. 5 і/або інші процеси для описаних тут методів. Процесор 980 і/або інші процесори і модулі на UE120 виконують або направляють процес 700 на фіг. 7 і/або інші процеси для описаних тут методів. Запам'ятовуючі пристрої 942 і 982 зберігають дані або програмні коди для базової станції 110 і UE120, відповідно. Планувальник 944 планує UE для передачі даних на низхідній лінії зв'язку і/або висхідній лінії зв'язку і забезпечує надання ресурсів для запланованих UE. Фахівцям повинно бути зрозумілим, що інформація і сигнали можуть бути представлені з використанням будь-яких з множини різноманітних технологій і методів. Наприклад, дані, інструкції, команди, інформація, сигнали, біти, символи і чіпи, які могли згадуватися по всьому опису, можуть бути представлені напругами, струмами, електромагнітними хвилями, магнітними полями або частинками, оптичними полями або частинками, або будь-якою їх комбінацією. Фахівцям повинно бути зрозумілим, що різні ілюстративні логічні блоки, модулі, схеми і кроки алгоритмів, описаних в зв'язку з розкритими тут варіантами здійснення, можуть бути виконані у вигляді електронних апаратних засобів, комп'ютерного програмного забезпечення або їх комбінації. Для ясного розуміння цієї взаємозамінності апаратних засобів і програмного забезпечення різні ілюстративні компоненти, блоки, модулі, схеми і кроки були описані вище в основному в термінах їх функціональних можливостей. Чи виконуються ці функціональні можливості у вигляді апаратних засобів або програмного забезпечення, залежить від обмежень конкретного застосування або проектування, що накладаються на всю систему. Фахівці можуть здійснити описані функціональні можливості різними способами для кожного конкретного застосування, але такі конструкційні рішення не повинні інтерпретуватися як відхилення від об'єму даного винаходу. Різні ілюстративні логічні блоки, модулі і схеми, описані в зв'язку з розкритими тут варіантами 96539 28 здійснення, можуть бути виконані або реалізовані з процесором загального призначення, процесором цифрової обробки сигналів (DSP), зі спеціалізованими інтегральними схемами (ASIC), програмованою вентильною матрицею (FPGA) або з іншим програмованим логічним пристроєм, дискретним вентилем або транзисторною логікою, дискретними компонентами апаратних засобів або будь-якою їх комбінацією, розрахованою для виконання описаних тут функцій. Процесор загального призначення може являти собою мікропроцесор, але, альтернативно, процесор може являти собою відомий процесор, контролер, мікроконтролер або кінцевий автомат. Процесор також може бути виконаний у вигляді комбінації обчислювальних пристроїв, наприклад, комбінації DSP процесора і мікропроцесора, множини мікропроцесорів, одного або декількох мікропроцесорів в поєднанні з ядром DSP процесора, або у вигляді будь-якої іншої подібної конфігурації. Етапи способу або алгоритм, описані в зв'язку з розкритими тут варіантами здійснення, можуть бути реалізовані безпосередньо в апаратних засобах, в модулі програмного забезпечення, що виконується процесором, або в їх комбінації. Модуль програмного забезпечення може являти собою запам'ятовуючий пристрій з довільною вибіркою (RAM, ПЗДВ), флеш-пам'ять, постійний запам'ятовуючий пристрій (ROM, ПЗП), стираний програмований постійний запам'ятовуючий пристрій (EPROM), електрично стираний програмований постійний запам'ятовуючий пристрій (EEPROM), регістри, жорсткий диск, змінний диск, постійний запам'ятовуючий пристрій на компакт-диску (CDROM) або будь-яку іншу форму носія даних, відому в рівні техніки. Ілюстративний носій даних приєднується до процесора, так що процесор може зчитувати інформацію з носія даних або записувати на нього. Альтернативно, носій даних може бути інтегральним з процесором. Процесор і носій даних можуть знаходитися в схемі ASIC. Схема ASIC може знаходитися в користувацькому терміналі. Альтернативно, процесор і носій даних можуть знаходитися в дискретних компонентах користувацького термінала. У одному або декількох ілюстративних варіантах здійснення різні описані тут функції можуть бути реалізовані в апаратних засобах, програмному забезпеченні, вбудованому програмному забезпечення або будь-якій їх комбінації. При реалізації в програмному забезпеченні функції можуть зберігатися або передаватися через одну або декілька інструкцій або через код на зчитуваному комп'ютером носії. Зчитувані комп'ютером носії включають в себе як комп'ютерний носій даних, так і засоби зв'язку, що включають в себе будь-яке середовище, яке сприяє перенесенню комп'ютерної програми з одного місця на інше. Носії даних можуть бути будь-якими доступними носіями, до яких може мати доступ комп'ютер. Наприклад, такі зчитувані комп'ютером носії можуть містити запам'ятовуючий пристрій з довільною вибіркою (RAM, ПЗДВ), постійний запам'ятовуючий пристрій (ROM, ПЗП), електрично стираний програмований постійний запам'ятовуючий пристрій (EEPROM), постій 29 ний запам'ятовуючий пристрій на компакт-диску (CD-ROM) або будь-яку іншу технологію пам'яті, як, наприклад, накопичувачі на магнітних дисках або будь-які інші магнітні запам'ятовуючі пристрої, або інші носії, які можуть бути використані, щоб переносити або зберігати бажаний програмний код в формі інструкцій або структур даних, і до яких може мати доступ комп'ютер, але не обмежуючись ними. Також, будь-яке з'єднання може називатися зчитуваним комп'ютером носієм. Наприклад, якщо програмне забезпечення передається з Інтернетсайту, сервера або іншого віддаленого джерела з використанням коаксіального кабелю, оптоволоконного кабеля, витої пари, цифрової абонентської лінії (DSL) або бездротових технологій, таких як інфрачервона, радіо- і мікрохвильова, потім, коаксіальний кабель, оптоволоконний кабель, вита пара, цифрова абонентська лінія (DSL) або бездротові технології, такі як інфрачервона, радіо- і мікрохвильова, включаються у визначення носія. Диск або диски, що згадується тут, включають в 96539 30 себе ком пакт-диск (CD), лазерний диск, оптичний диск, цифровий багатофункціональний диск (DVD), дискету і диск на блакитному промені (BD), де магнітні диски (disks) звичайно відтворюють дані магнітним способом, а оптичні диски (discs) звичайно відтворюють дані оптично за допомогою лазерів. Комбінації вищеописаних засобів також можуть бути включені в рамки зчитуваних комп'ютером носіїв. Попередній опис розкритих варіантів здійснення забезпечений, щоб дати можливість будь-якому фахівцеві застосувати даний винахід. Фахівцям будуть очевидні різні модифікації цих варіантів здійснення, і основоположні розкриті принципи можуть застосовуватися до інших варіантів здійснення без відхилення від об'єму і суті даного винаходу. Таким чином, даний винахід не повинен обмежуватися показаними варіантами здійснення, але повинен відповідати більш широкому об'єму, який узгоджується з розкритими принципами і новими ознаками. 31 96539 32 33 96539 34 35 96539 36 37 96539 38 39 Комп’ютерна верстка М. Ломалова 96539 Підписне 40 Тираж 23 прим. Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюNull pilots for interference estimation in a wireless communication network
Автори англійськоюBhushan Naga, Gorokhov, Alexei, Y., Borran, Mohammad, J., Agrawal, Avneesh, Khandekar, Aamod, D., Ji, Tingfang
Назва патенту російськоюНулевые пилот-сигналы для использования оценки помех в системе беспроводной связи
Автори російськоюБхушан Нага, Горохов Алексей Ю., Борран Мохаммад Дж., Агравал Авниш, Кхандекар Аамод Д., Цзи Тинфан
МПК / Мітки
МПК: H04W 72/00
Мітки: нульові, бездротового, пілот-сигнали, виконання, зв'язку, перешкод, оцінки, системі
Код посилання
<a href="https://ua.patents.su/20-96539-nulovi-pilot-signali-dlya-vikonannya-ocinki-pereshkod-v-sistemi-bezdrotovogo-zvyazku.html" target="_blank" rel="follow" title="База патентів України">Нульові пілот-сигнали для виконання оцінки перешкод в системі бездротового зв’язку</a>
Постійне ослаблення перешкод в системі бездротового зв’язку
Номер патенту: 96377
Опубліковано: 25.10.2011
Автори: Бхушан Нага, Паланкі Раві, Кхандекар Аамод
МПК: H04W 28/00, H04W 28/06
Мітки: ослаблення, зв'язку, перешкод, системі, постійне, бездротового
Формула / Реферат:
1. Спосіб бездротового зв'язку, який включає етап, на якомувідправляють запит для зменшення перешкод щонайменше однієї станції, що здійснює перешкоди, причому запит є дійсним протягом періоду часу, що охоплює множину періодів відповіді, кожна станція, що здійснює перешкоди, має можливість схвалити або відхилити запит в кожному періоді відповіді.2. Спосіб за п. 1, який додатково включає етап, на якомуформують запит таким...
Спосіб і пристрій (варіанти) передачі пілот-сигналу та спосіб і пристрій (варіанти) виконання оцінки каналу у безпровідній системі зв’язку
Номер патенту: 83705
Опубліковано: 11.08.2008
Автори: Горе Дхананджай Ашок, Агравал Авніш, Кадоус Тамер
МПК: H04B 7/06, H04L 27/26, H04L 25/02
Мітки: безпровідній, спосіб, виконання, каналу, пілот-сигналу, системі, передачі, пристрій, оцінки, зв'язку, варіанти
Формула / Реферат:
1. Спосіб передачі пілот-сигналу у безпровідній системі зв'язку з множиною антен, що містить етапи:генерують перший набір з Т масштабованих пілотних символів за допомогою першого вектора з Т коефіцієнтів, де Т - ціле число більше одиниці, і в якому перший набір масштабованих пілотних символів призначений для використання для оцінки каналу приймачами з однією антеною;вибірково генерують щонайменше Т-1 додаткових наборів з Т...
Способи та пристрої для передачі і прийому пілот-сигналу і даних з швидким стрибкоподібним перестроюванням частоти з мультиплексованим з кодовим розділенням пілот-сигналом у системі мдочр
Номер патенту: 88873
Опубліковано: 10.12.2009
Автори: Агравал Авніш, Тіг Едвард Харрісон
МПК: H04B 7/00, H04B 7/212
Мітки: швидким, мультиплексованим, даних, системі, кодовим, пілот-сигналу, розділенням, перестроюванням, способи, прийому, передачі, частоти, пристрої, стрибкоподібним, мдочр, пілот-сигналом
Формула / Реферат:
1. Спосіб передачі широкосмугового пілот-сигналу у системі безпровідного зв'язку з множинними несучими, який полягає у тому, що обробляють щонайменше один символ пілот-сигналу псевдовипадковим числовим (PN) кодом для одержання послідовності чіпів пілот-сигналу для широкосмугового пілот-сигналу, обробляють символи даних відповідно до схеми модуляції множинних несучих для одержання послідовності чіпів даних, мультиплексують з часовим...
Пілот-сигнали для використання в багатосекторних стільниках
Номер патенту: 94018
Опубліковано: 11.04.2011
Автори: Лароя Раджив, Лі Цзюньі, Фен Джон Л.
МПК: H04L 29/00
Мітки: стільниках, використання, пілот-сигнали, багатосекторних
Формула / Реферат:
1. Спосіб передачі тонів пілот-сигналу в багатосекторному стільнику, що включає в себе щонайменше перший сектор і другий сектор, причому другий сектор розташований поряд зі згаданим першим сектором, спосіб містить:передачу, з використанням першого тону, у згаданий перший сектор протягом першого часу символу, першого пілот-сигналу, що має першу заздалегідь вибрану потужність передачі;передачу, з використанням згаданого першого...
Пілот-сигнали для використання в багатосекторних стільниках
Номер патенту: 94204
Опубліковано: 11.04.2011
Автори: Лароя Раджив, Фен Джон Л., Лі Цзюньі
МПК: H04L 29/08, H04L 29/00, H04B 7/204
Мітки: стільниках, багатосекторних, пілот-сигнали, використання
Формула / Реферат:
1. Спосіб передачі тонів пілот-сигналу в багатосекторному стільнику, який включає в себе щонайменше перший сектор і другий сектор, причому другий сектор розташований поблизу зі згаданим першим сектором, спосіб включає:- передачу, з використанням першого тону, у згаданий перший сектор протягом першого часу символу, першого пілот-сигналу, який має першу попередньо вибрану потужність передачі;- передачу, з використанням згаданого...
Попередній патент: З’єднувальний пристрій для з’єднання приводу ножа ріжучого апарата з ножем ріжучого апарата
Наступний патент: Спосіб приведення дискретних гармонічних складових цифрових сигналів до циклічних згорток
Випадковий патент: Апарат для електрохімічної очистки природних і стічних вод тец