Пристрій, системи і способи регулювання притискної сили рядного висівного апарата
Номер патенту: 110988
Опубліковано: 10.03.2016
Автори: Столлер Джейсон Дж., Радтке Іан Р., Саудер Дерек Е.

Формула / Реферат
1. Система для застосування притискної сили до сільськогосподарського начіпного знаряддя, яке має багаторядні висівні апарати, що включає в себе:
перший привід, при цьому зазначений перший привід призначений для застосування сили до першого рядного висівного апарата, при цьому зазначений перший привід включає в себе першу притискну камеру і першу підйомну камеру, при цьому тиск у зазначеній першій притискній камері має тенденцію протистояти тиску у зазначеній першій підйомній камері;
другий привід, при цьому зазначений другий привід призначений для застосування сили до другого рядного висівного апарата, при цьому зазначений другий привід включає в себе другу притискну камеру і другу підйомну камеру, при цьому тиск у зазначеній другій притискній камері має тенденцію протистояти тиску у зазначеній другій підйомній камері;
перший пристрій регулювання тиску притискання, який має гідравлічний зв'язок із зазначеною першою притискною камерою для регулювання тиску у зазначеній першій притискній камері, при цьому зазначений перший пристрій регулювання тиску притискання виконаний з можливістю підтримки, як вибраного першого тиску притискання, будь-якого безперервного діапазону значень тиску у зазначеній першій притискній камері;
другий пристрій регулювання тиску притискання, який має гідравлічний зв'язок із зазначеною другою притискною камерою для регулювання тиску у зазначеній другій притискній камері, при цьому зазначений другий пристрій регулювання тиску притискання виконаний з можливістю підтримки, як вибраного другого тиску притискання, будь-якого безперервного діапазону значень тиску у зазначеній другій притискній камері, де зазначений вибраний другий тиск притискання відрізняється від зазначеного вибраного першого тиску притискання;
пристрій регулювання тиску підйому, який має гідравлічний зв'язок як із зазначеною першою підйомною камерою, так із зазначеною другою підйомною камерою, для регулювання тиску у зазначеній першій підйомній камері і у зазначеній другій підйомній камері, при цьому зазначений пристрій регулювання тиску підйому виконаний з можливістю підтримки, як вибраного тиску підйому, будь-якого безперервного діапазону значень тиску як у зазначеній першій підйомній камері, так і у зазначеній другій підйомній камері, де зазначений вибраний тиск підйому відрізняється від зазначеного вибраного першого тиску притискання і зазначеного вибраного другого тиску притискання; і
схему обробки, яка має електричний зв'язок із зазначеним першим пристроєм регулювання тиску притискання, із зазначеним другим пристроєм регулювання тиску притискання і зазначеним пристроєм регулювання тиску підйому, при цьому зазначена схема обробки виконана з можливістю зміни робочого стану зазначеного першого пристрою регулювання тиску притискання, зазначеного другого пристрою регулювання тиску притискання і зазначеного пристрою регулювання тиску підйому.
2. Система за п. 1, в якій зазначена схема обробки додатково виконана з можливістю:
визначати перший критерій проникнення у ґрунт, пов'язаний із зазначеним першим рядним висівним апаратом;
визначати другий критерій проникнення у ґрунт, пов'язаний із зазначеним другим рядним висівним апаратом;
визначати, чи, або зазначений перший критерій проникнення у ґрунт, або зазначений другий критерій проникнення у ґрунт перевищує заданий діапазон; і
зменшити тиск у зазначеній першій підйомній камері і зазначеній другій підйомній камері, коли або зазначений перший критерій проникнення у ґрунт, або зазначений другий критерій проникнення у ґрунт перевищує зазначений заданий діапазон.
3. Система за п. 1, яка додатково включає в себе:
перший датчик притискної сили, пов'язаний із зазначеним першим рядним висівним апаратом, при цьому зазначений перший датчик притискної сили має електричний зв'язок із зазначеною схему обробки, при цьому зазначений перший датчик притискної сили виконаний з можливістю генерування першого сигналу притискної сили, пов'язаного із силою між ґрунтом і зазначеним першим рядним висівним апаратом; і
другий датчик притискної сили, пов'язаний із зазначеним другим рядним висівним апаратом, при цьому зазначений другий датчик притискної сили має електричний зв'язок із зазначеною схемою обробки, при цьому зазначений другий датчик притискної сили виконаний з можливістю генерування другого сигналу притискної сили, пов'язаного із силою між ґрунтом і зазначеним другим рядним висівним апаратом.
4. Система за п. 3, в якій зазначена схема обробки додатково виконана з можливістю:
вибрати та задати тиск у зазначеній першій притискній камері на основі зазначеного першого сигналу притискної сили; і
вибрати та задати тиск у зазначеній другій притискній камері на основі зазначеного другого сигналу притискної сили.
5. Система за п. 2, яка додатково включає в себе:
перший датчик притискної сили, пов'язаний із зазначеним першим рядним висівним апаратом, при цьому зазначений перший датчик притискної сили має електричний зв'язок із зазначеною схему обробки, при цьому зазначений перший датчик притискної сили виконаний з можливістю генерування першого сигналу притискної сили, пов'язаного із силою між ґрунтом і зазначеним першим рядним висівним апаратом; і
другий датчик притискної сили, пов'язаний із зазначеним другим рядним висівним апаратом, при цьому зазначений другий датчик притискної сили має електричний зв'язок із зазначеною схемою обробки, при цьому зазначений другий датчик притискної сили виконаний з можливістю генерування другого сигналу притискної сили, пов'язаного із силою між ґрунтом і зазначеним другим рядним висівним апаратом,
при цьому зазначена схема обробки додатково виконана з можливістю визначення тиску у зазначеній першій притискній камері на основі зазначеного першого сигналу притискної сили і визначення тиску у зазначеній другій притискній камері на основі зазначеного другого сигналу притискної сили.
6. Система за п. 5, в якій зазначена схема обробки додатково виконана з можливістю:
визначити, чи або зазначений перший критерій проникнення у ґрунт, або зазначений другий критерій проникнення у ґрунт є меншим, ніж заданий діапазон, і
підвищити тиск у зазначеній першій підйомній камері і у зазначеній другій підйомній камері, коли або зазначений перший критерій проникнення у ґрунт, або зазначений другий критерій проникнення у ґрунт є меншим, ніж зазначений заданий діапазон, і коли ні зазначений перший критерій проникнення у ґрунт, ні зазначений другий критерій проникнення у ґрунт не перевищують зазначений заданий діапазон.
7. Система за п. 6, в якій зазначений перший датчик притискної сили містить штифт вимірювання навантаження.
8. Система за п. 6, в якій зазначена схема обробки додатково виконана з можливістю підтримувати тиск у зазначеній першій притискній камері і зазначеній другій притискній камері, коли як зазначений перший критерій проникнення у ґрунт, так і зазначений другий критерій проникнення у ґрунт знаходяться в межах зазначеного заданого діапазону.
9. Спосіб регулювання сили, що застосовується до першого сільськогосподарського рядного висівного апарата за допомогою першого приводу, який має першу камеру і другу камеру, і регулювання сили, що застосовується до другого сільськогосподарського рядного висівного апарата за допомогою другого приводу, який має третю камеру і четверту камеру, який включає в себе:
підтримування першого вибраного тиску в першій камері шляхом зміни робочого стану першого пристрою регулювання, який має гідравлічний зв'язок з першою камерою;
підтримування другого вибраного тиску в третій камері шляхом зміни робочого стану другого пристрою регулювання, який має гідравлічний зв'язок з третьою камерою, і
підтримування третього вибраного тиску в другій камері і четвертій камері шляхом зміни робочого стану третього пристрою регулювання, який має гідравлічний зв'язок з другою камерою і четвертою камерою, де зазначений третій вибраний тиск відрізняється від зазначеного першого вибраного тиску і зазначеного другого вибраного тиску.
10. Спосіб за п. 9, який додатково включає в себе:
визначення першого критерію проникнення у ґрунт, пов'язаного з першим рядним висівним апаратом;
визначення другого критерію проникнення у ґрунт, пов'язаного з другим рядним висівним апаратом;
визначення, чи або зазначений перший критерій проникнення у ґрунт, або зазначений другий критерій проникнення у ґрунт перевищує заданий діапазон; і
зменшення зазначеного третього вибраного тиску, коли або зазначений перший критерій проникнення у ґрунт, або зазначений другий критерій проникнення у ґрунт перевищує зазначений заданий діапазон.
11. Спосіб за п. 9, який додатково включає в себе:
генерування першого сигналу притискної сили, пов'язаного із силою між ґрунтом і першим рядним висівним апаратом, і
генерування другого сигналу притискної сили, пов'язаного із силою між ґрунтом і другим рядним висівним апаратом.
12. Спосіб за п. 9, який додатково включає в себе:
генерування першого сигналу притискної сили, пов'язаного із силою між ґрунтом і першим рядним висівним апаратом; і
генерування другого сигналу притискної сили, пов'язаного із силою між ґрунтом і другим рядним висівним апаратом;
вибір та задання тиску у першій камері на основі зазначеного першого сигналу притискної сили; і
вибір та задання тиску у третій камері на основі зазначеного другого сигналу притискної сили.
13. Спосіб за п. 10, який додатково включає в себе:
визначення, чи або зазначений перший критерій проникнення у ґрунт, або зазначений другий критерій проникнення у ґрунт є меншим, ніж заданий діапазон; і
підвищення зазначеного третього тиску, коли або зазначений перший критерій проникнення у ґрунт, або зазначений другий критерій проникнення у ґрунт є меншим, ніж зазначений заданий діапазон, і коли ні зазначений перший критерій проникнення у ґрунт, ні зазначений другий критерій проникнення у ґрунт не перевищують зазначений заданий діапазон.
14. Спосіб за п. 13, який додатково включає в себе:
підтримування зазначеного третього тиску, коли як зазначений перший критерій проникнення у ґрунт, так і зазначений другий критерій проникнення у ґрунт знаходяться в межах зазначеного заданого діапазону.
15. Спосіб за п. 14, в якому зазначена перша камера і зазначена третя камера є притискними камерами зазначених першого і другого приводів, відповідно, і за яким зазначена друга камера і зазначена четверта камера є підйомними камерами зазначених першого і другого приводів, відповідно.
Текст
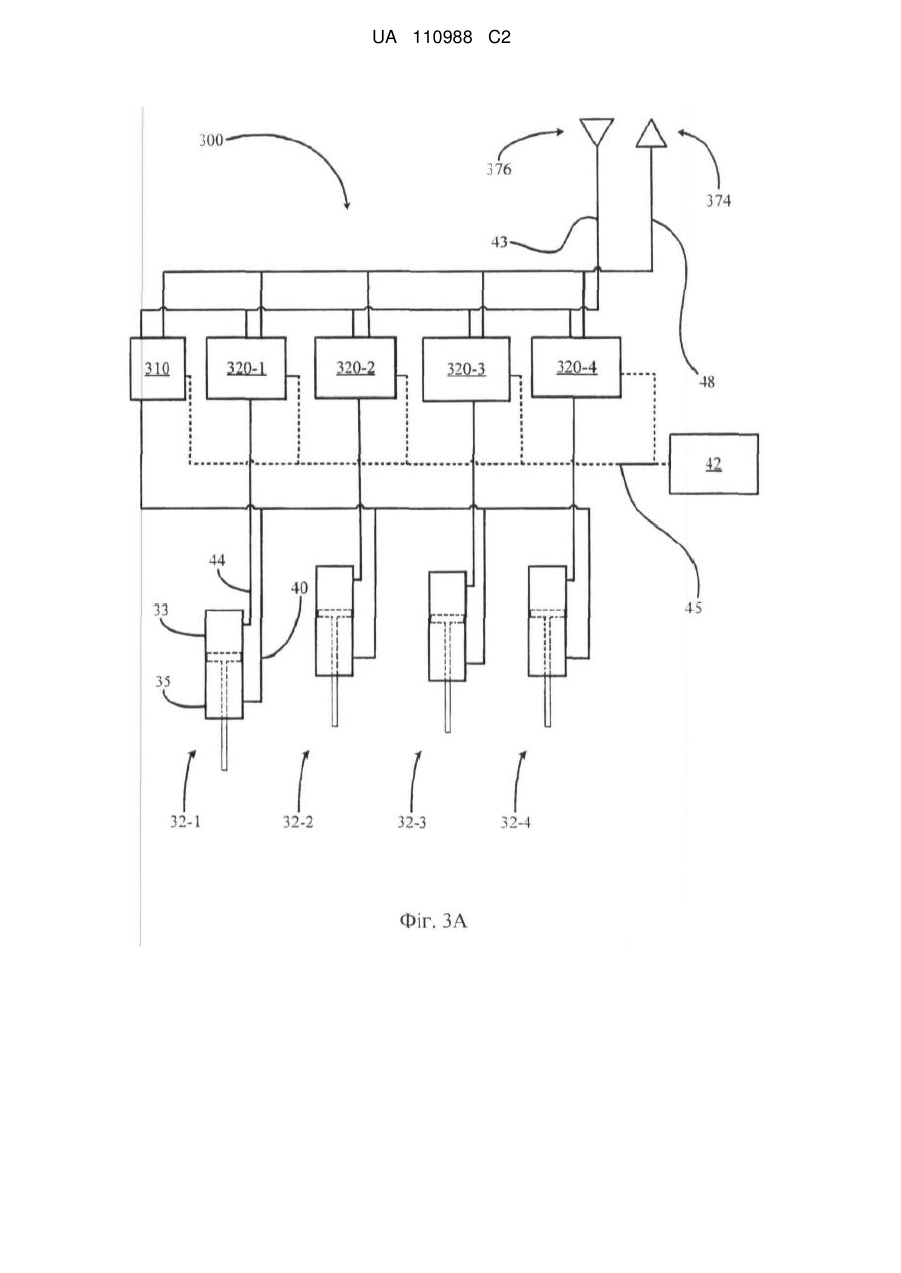
Реферат: Пропонуються системи, способи і пристрій для регулювання притискної сили, що застосовується до сільськогосподарського начіпного знаряддя, яке має багаторядні висівні апарати. UA 110988 C2 (12) UA 110988 C2 UA 110988 C2 5 10 15 20 25 30 35 40 45 50 55 60 Передумови винаходу Загально визнаним є той факт, що достатня притискна сила має застосовуватися на рядному висівному апараті сівалки для забезпечення досягнення необхідної глибини борозни і ущільнення ґрунту. В разі застосування надмірної притискної сили, особливо на м'яких або вологих ґрунтах, ґрунт може надмірно ущільнюватися, що може вплинути на здатність насіння, яке проростає, пробиватися через ґрунт. Якщо ж застосовується недостатня притискна сила, зокрема на твердому або сухому ґрунті, сівалка може підійматися вгору та назовні з ґрунту, що призводить до недостатньої глибини борозни. В минулому, часто використовувалися циліндричні гвинтові пружини, які розміщувалися між паралельними тягами рядних висівних апаратів сівалки, для забезпечення додаткової або "допоміжної" притискної сили, потрібної для досягнення необхідної глибини борозни і ущільнення ґрунту. Розміщуючи пружину в різних заданих місцях уздовж паралельних тяг, величина притискної сили, що діє на рядний висівний апарат може збільшуватися або зменшуватися. Проте, величина допоміжної притискної сили, що діяла з боку пружини, залишалася незмінною до тих пір, поки не змінювалося положення пружини. Наприклад, коли сівалка зустрічала на своєму шляху твердий або сухий ґрунт, який потребував застосування більшої допоміжної притискної сили, необхідної для забезпечення глибини борозни або необхідного ущільнення ґрунту, оператор мусив зупинитися і налаштувати розташування пружини з метою підвищення допоміжної притискної сили. Крім того, під час роботи, по мірі того, як насіння або добрива в бункерах розподілялися, вага рядного висівного апарату поступово зменшувалася, спричиняючи відповідне зменшення загальної притискної сили на копіювальні колеса, оскільки допоміжна притискна сила, що діє з боку пружини, залишалася по суті, незмінною до моменту зміни положення пружини вручну. Більш досконалі системи забезпечення допоміжної притискної сили, такі як описані в патентній заявці на патент U.S. № 12/679.710 (№ публікації US2010/0198529) by Sauder et al. (далі "Заявка Sauder '710"), яка включена тут у повному обсязі шляхом посилання, вимірюють напруження на елементі механізму регулювання копіювального колеса для визначення сили, що діє на копіювальні колеса з метою визначення притискної сили. Проте, системи централізованого регулювання, які застосовують загальну допоміжну притискну силу до кожного рядного висівного апарату часто не в змозі реагувати на унікальні навантаження, яких зазнає кожен рядний висівний апарат, таким чином, що недостатня або надмірна допоміжна притискна сила може бути застосована до будь-якого даного рядного висівного апарату. Таким чином, існує потреба у системі регулювання притискної сили, яка б ефективно забезпечувала необхідну притискну силу на кожному рядному висівному апараті сільськогосподарського начіпного знаряддя, що має множину рядних висівних апаратів. Короткий опис фігур Фігура 1А являє собою вертикальний вигляд збоку одного з варіантів рядного висівного апарату сівалки. Фігура 1B являє собою вертикальний вигляд збоку рядного висівного апарату сівалки відповідно до Фігури 1 із зображеним елементом регулювання глибини. Фігура 2 являє собою вигляд зверху трактора і рядного висівного апарату сівалки відповідно до Фігури 1, яка схематично ілюструє один варіант системи регулювання притискної сили. Фігура 3А являє собою більш детальне схематичне зображення системи регулювання притискної сили відповідно до Фігури 2. Фігура 3В являє собою схематичне зображення іншого варіанту виконання системи регулювання притискної сили. Фігура 3С являє собою схематичне зображення ще одного варіанту виконання системи регулювання притискної сили, що включає в себе двоступеневий привід. Фігура 3D являє собою схематичне зображення ще одного варіанту виконання системи регулювання притискної сили, що включає в себе двоступеневий привід і регенеративний контур. Фігура 4А ілюструє варіант послідовності операцій способу визначення тиску притискання. Фігура 4B ілюструє варіант послідовності операцій способу визначення тиску підйому. Фігура 4C ілюструє інший варіант послідовності операцій способу визначення тиску підйому. Фігура 4D ілюструє діапазони тиску для камери приводу. Фігура 5А являє собою вигляд у перспективі варіанту виконання двоступеневого приводу. Фігура 5B являє собою вигляд у поперечному розрізі двоступеневого приводу відповідно до Фігури 5А. Фігура 5C являє собою вигляд у поперечному розрізі двоступеневого приводу відповідно до Фігури 5А. 1 UA 110988 C2 5 10 15 20 25 30 35 40 45 50 55 60 Фігура 6А ілюструє інший варіант послідовності операцій способу визначення тиску притискання. Фігура 6В ілюструє інший варіант послідовності операцій способу визначення тиску підйому. Фігура 7 ілюструє ще один варіант послідовності операцій способу визначення тиску підйому. Фігура 8 являє собою схематичне зображення варіанту приводу, що включає в себе датчик тиску. Опис Система регулювання притискної сили рядного висівного апарату Посилаючись на фігури, на яких однакові номери позицій позначають однакові або відповідні частини всюди на різних виглядах, Фігура 1А ілюструє вертикальний вигляд збоку рядного висівного апарату 10 сівалки 1. Вигляд зверху сівалки 1 зображений на Фігурі 2, на якій чотири рядні висівні апарати 10 встановлені поперечно з певним інтервалом уздовж довжини поперечного брусу 2 за допомогою з'єднання паралельних тяг 8, які дозволяють кожному рядному висівному апарату рухатися вертикально незалежно одне від одного і по відношенню до поперечного брусу 2. Слід розуміти, що сівалка 1 може містити набагато більше рядних висівних апаратів, а, отже, чотирирядна сівалка відповідно до Фігури 2 представлена тільки з метою ілюстрації. Кожен рядний висівний апарат 10 включає в себе раму рядного висівного апарату, яка підтримує один або кілька контейнерів або бункерів 20 для зберігання насіння, інсектициду або інших речовин для внесення під сільськогосподарські культури. Кожен рядний висівний апарат 10 включає диски сошника 12 для відкриття борозни або траншеї в ґрунті 14, під час буксирування сівалки полем за допомогою трактора 50. Глибина траншеї визначається копіювальними колесами 18, які котяться по поверхні ґрунту 14. Розглядаючи вигляд на Фігурі 1B, копіювальні колеса 18 змонтовані на тягах 36 копіювального колеса на вісі 34. Тяги 36 копіювального колеса шарнірно з'єднані з рамою 6 у точці шарніру 56. Тяга регулювання глибини 54 шарнірно з'єднана з рамою 6 навколо штифта 51. Тяга регулювання глибини 54 контактує з копіювальним колесом 36, обмежуючи переміщення вгору копіювальних коліс 18. Оператор може обертати тягу регулювання глибини 54 для регулювання положення тяги регулювання глибини 54, а, отже, максимальної висоти копіювальних коліс 18 по відношенню до рами 6. Варто взяти до уваги, що інші варіанти виконання рядного висівного апарату 10 є відомими в даній галузі техніки, наприклад, такі, що включають в себе копіювальні колеса, які "переступають" через перешкоди за допомогою коромисла, як описано у патенті U.S. №5.235.922, що включений тут у повному обсязі шляхом посилання. Продовжуючи розглядати Фігуру 1B, кожен рядний висівний апарат 10 переважно включає в себе датчик 52 притискної сили для вимірювання параметра, що відноситься до вертикальної сили між копіювальними колесами 18 і поверхнею ґрунту 14, і який генерує сигнал навантаження, пов'язаний з таким параметром. Датчик 52 може містити будь-який датчик, сконфігурований для вимірювання такого параметра, включаючи тензодатчик, змонтований на тязі копіювального колеса 36, як зображено на Фігурі 1B і, як описано в патенті U.S. №6.701.857 на ім'я Jensen, що включений тут у повному обсязі шляхом посилання. В інших варіантах виконання, датчик 52 може містити штифт вимірювання навантаження, який заміняє штифт 51, як описано в патентній публікації U.S. №2010/0180695, що включена тут у повному обсязі шляхом посилання. Як проілюстровано на Фігурі 2, сигнали від кожного з датчиків, 52-1, 52-2, 52-3, 52-4 передаються через сигнальний провід 38, які разом утворюють джгут сигнальних проводів 31, на монітор 42 (Фігура 2), який переважно розташований в кабіні трактора 50. Переважний варіант монітора 42 описано у патентній публікації U.S. №2010/0010667, що включена тут у повному обсязі шляхом посилання. Монітор 42 переважно включає в себе процесор, пам'ять і графічний інтерфейс користувача ("ГІК"). Слід мати на увазі, що сила на копіювальних колесах 18 являє собою притискну силу на рядному висівному апараті 10, що перевищує притискну силу, потрібну дискам сошника 12, щоб проникнути у ґрунт 14 на задану глибину. Таким чином, під час роботи, бажано підтримувати певне мінімальне порогове значення сили на копіювальних колесах 18 для забезпечення того, щоб рядний висівний апарат працював на необхідній глибині. Проте, бажано підтримувати силу на копіювальних колесах 18 нижче верхнього порогового значення, щоб мінімізувати ущільнення і уникнути виштовхування ґрунту 14 у напрямку руху. З метою забезпечення підтримки оптимального рівня притискної сили, рядний висівний апарат 10 забезпечений приводом 32. Привід 32 шарнірно з'єднаний на першому кінці із поперечним брусом 2 за допомогою монтажного кронштейна. Привід 32 шарнірно з'єднаний на 2 UA 110988 C2 5 10 15 20 25 30 35 40 45 50 55 60 другому кінці з однією з тяг паралельного з'єднання 8. Перша гідравлічна лінія 40 має гідравлічний зв'язок з підйомною камерою 35 (Фігура 3А) приводу 32. Друга гідравлічна лінія 44 має гідравлічний зв'язок з притискною камерою 33 (Фігура 3А) приводу 32. Коли тиск у притискній камері 33 перевищує тиск у підйомній камері 35, привід 32 застосовує притискну силу на рядний висівний апарат 10, збільшуючи силу, що діє на копіювальні колеса 18. Коли тиск у підйомній камері 35 перевищує тиск у притискній камері 33, привід 32 застосовує підіймальну силу на рядний висівний апарат 10, зменшуючи силу, що діє на копіювальні колеса 18. Система регулювання 300 використовується для керування приводами 32. Магістраль подачі гідравлічної рідини 43 з'єднує систему регулювання 300 з отвором подачі гідравлічної рідини 376 (Фігура 3А) резервуару гідравлічної рідини (не зображений), переважно встановленим на тракторі 50. Зворотна магістраль гідравлічної рідини 48 з'єднує систему регулювання 300 зі зворотним отвором гідравлічної рідини 374 (Фігура 3А) резервуару гідравлічної рідини. Джгут проводів приводу 45 з'єднує монітор 42 із системою регулювання 300 для передачі сигналів керування приводом на кожний привід 32 на кожному рядному висівному апараті 10. Система регулювання тиску Один варіант виконання системи регулювання 300 схематично зображено на Фігурі 3. Система регулювання 300 включає в себе пристрій регулювання тиску підйому 310, який має гідравлічний зв'язок з магістраллю подачі гідравлічної рідини 43 і зворотною магістраллю гідравлічної рідини 48. Пристрій регулювання тиску підйому 310 який має гідравлічний зв'язок з підйомною камерою 35 кожного приводу 32-1, 32-2, 32-3, 32-4. Система регулювання 300 також включає в себе пристрої регулювання тиску притискання 320. Кожен пристрій регулювання тиску притискання 320-1, 320-2, 320-3, 320-4 має гідравлічний зв'язок з магістраллю подачі гідравлічної рідини 43 і зворотною магістраллю гідравлічної рідини 48. Кожен пристрій регулювання тиску притискання 320-1 має гідравлічний зв'язок з притискною камерою 33 одного з відповідних приводів 32-1, 32-2, 32-3, 32-4. Монітор 42 переважно має електричний зв'язок з кожним з пристроїв регулювання тиску притискання 320 і з пристроєм регулювання тиску підйому 310 через джгут проводів приводу 45. Монітор 42 переважно налаштований для зміни робочого стану кожного пристрою регулювання 310, 320 (наприклад, для зміни тиску, що задається командами кожного пристрою регулювання). Під час роботи монітор 42 задає індивідуальний тиск притискання кожному пристрою регулювання тиску притискання 320, який потім встановлює заданий тиск притискання у притискній камері 33 відповідного приводу 32. Монітор 42 також задає загальний тиск підйому пристрою регулювання тиску підйому 310, який потім встановлює заданий загальний тиск підйому у підйомних камерах 35 кожного приводу 32. У варіанті, зображеному на Фігурі 3В, пристрій регулювання тиску підйому 310 і пристрій регулювання тиску притискання 320 включають в себе клапани зниження-скидання тиску, такі як модель № TS10-36 виробництва компанії "HydraForce" з Лінкольнширу (Lincolnshire), штат Іллінойс (Illinois). У такому варіанті, магістраль подачі гідравлічної рідини 43 і зворотна магістраль гідравлічної рідини 48 мають гідравлічний зв'язок з напірним отвором і зливним отвором, відповідно, кожного клапана, а робочий отвір кожного клапана з'єднаний з відповідним приводом 32. Монітор 42 має електричний зв'язок із соленоїдом, з'єднаним із кожним клапаном. Під час роботи монітор 42 надсилає індивідуальний керуючий струм на кожний клапан, і кожен клапан задає тиск пропорційно до відповідного керуючого струму. Способи регулювання Оскільки тиск підйому у системі регулювання 300 є загальним для всіх рядків, спосіб керування такою системою переважно задає відповідний тиск підйому на основі тиску притискання, що застосовується до кожного рядка. Такий спосіб переважно мінімізує виникнення втрати глибини посіву у будь-якому рядку і переважно мінімізує виникнення надлишкової притискної сили у будь-якому рядку. Переважний спосіб 400 визначення та встановлення необхідного тиску притискання і тиску підйому на приводах 32 проілюстрований на Фігурах 4А-4В. Спосіб 400 включає в себе способи 420 визначення та задання необхідного тиску притискання для кожного рядного висівного апарату 10 і спосіб 450 визначення та задання необхідного загального тиску підйому для всіх рядних висівних апаратів. Посилаючись на Фігуру 4А, окремий спосіб 420 використовується для кожного рядка, щоб визначити індивідуальний тиск притискання для задання кожному приводу 32. На етапі 402, монітор 42 отримує вимір поточної притискної сили для рядка від відповідного датчика 52. На етапі 404, монітор 42 переважно визначає необхідний чистий тиск переважно на основі виміру поточної притискної сили. Необхідний чистий тиск є необхідною сумою тиску притискання у 3 UA 110988 C2 5 10 15 20 25 30 35 40 45 50 55 60 притискній камері 33 за винятком тиску підйому у підйомній камері 35. Для того щоб визначити тиск притискання, необхідний для отримання необхідного чистого тиску, монітор 42 переважно отримує поточний заданий тиск підйому на етапі 406. Поточний заданий тиск підйому переважно зберігається в пам'яті за допомогою способу 450, як описано тут з посиланням на Фігуру 4В. На етапі 408, монітор 42 визначає заданий тиск притискання на основі поточного заданого тиску підйому і необхідного чистого тиску. На етапі 410, монітор 42 надсилає сигнал керування на пристрій регулювання тиску притискання 320, пов'язаний із заданим тиском притискання. На етапі 412, монітор 42 переважно зберігає новий заданий тиск притискання в пам'яті. Розглядаючи Фігуру 4В, спосіб 450 переважно порівнює поточний тиск притискання на кожному рядку із необхідним діапазоном, а потім визначає відповідний загальний тиск підйому для його задання приводам 32 на основі таких порівнянь. Один з варіантів необхідного діапазону тиску притискання 480 проілюстровано на Фігурі 4D. Як проілюстровано, кожна камера притискного тиску має максимальний робочий тиск 472. У проілюстрованому варіанті, максимальний робочий тиск 472 становить приблизно 3000 фунтів на квадратний дюйм. Слід мати на увазі у світлі цього опису, що, якщо монітор 42 задає негативний тиск притискання на одному рядку, то спосіб 420 визначив, що цей рядок потребує більшого тиску підйому, ніж той, який забезпечується підйомною камерою, тобто надлишкова притискна сила є занадто високою. Таким чином, необхідний діапазон 480 переважно має мінімум 484, який приблизно дорівнює нулю. Навпаки, якщо монітор 42 задає тиск притискання, більший, ніж максимальний робочий тиск притискної камери, то тиск підйому потребує зниження, щоб підтримувати глибину на цьому рядку. Таким чином, необхідний діапазон 480 має максимум 482, який приблизно дорівнює максимальному робочому тиску 472. Слід також зазначити, що оскільки гідравлічні системи потребують певний проміжок часу, щоб реагувати на команди, може бути бажано, почати змінювати тиск підйому, як тільки тиск притискання у даному рядку наближається або до нуля, або до максимального робочого тиску притискної камери. Таким чином, другий варіант необхідного діапазону тиску притискання 490 проілюстровано на Фігурі 4D. Необхідний діапазон 490 має максимум 492, який є меншим, ніж максимальний робочий тиск 472 по верхній зоні 495. Необхідний діапазон 490 має мінімум 494, який є більшим, ніж максимальний робочий тиск 472 по нижній зоні 493. Величини нижньої зони 493 і верхньої зони 495 обираються таким чином, щоб дозволити системі регулювання 300 змінювати на випередження тиск підйому, не роблячи при цьому непотрібних або занадто частих змін тиску підйому. Таким чином, повертаючись до Фігури 4В і способу 450 визначення тиску підйому, монітор 42 отримує поточний заданий тиск притискання для кожного рядка на етапі 432. Поточний заданий тиск притискання переважно зберігається в пам'яті за допомогою способу 420, як описано тут з посиланням на Фігуру 4А. На етапі 434, монітор 42 визначає, чи тиск притискання у будь-якому з приводів 32 знаходиться за межами необхідного діапазону. Якщо тиск притискання знаходиться в межах необхідного діапазону для всіх приводів, то на етапі 436 монітор 42 переважно підтримує поточний заданий тиск підйому і на етапі 446 переважно зберігає поточний заданий тиск підйому в пам'яті. Якщо тиск притискання знаходиться за межами необхідного діапазону, принаймні, для одного приводу, тоді на етапі 438 монітор 42 визначає, чи один або більше рядків знаходяться вище або нижче необхідного діапазону. Якщо принаймні один рядок знаходиться вище необхідного діапазону і жоден з рядків не знаходиться нижче необхідного діапазону, то на етапі 440 монітор 42 переважно дає команду на зниження тиску підйому, і на етапі 446 переважно зберігає новий заданий тиск підйому в пам'яті. Якщо принаймні один рядок знаходиться нижче необхідного діапазону і жоден з рядків не знаходиться вище необхідного діапазону, то на етапі 444 монітор 42 переважно дає команду на підвищення тиску підйому, і на етапі 446 переважно зберігає новий заданий тиск підйому в пам'яті. Якщо принаймні один рядок знаходиться вище необхідного діапазону і принаймні один рядок знаходиться нижче необхідного діапазону, то на етапі 442 монітор 42 переважно дає команду на зниження тиску підйому і на етапі 446 переважно зберігає новий заданий тиск підйому в пам'яті. Зниження тиску підйому на етапі 442 є переважним, оскільки, коли перший рядок має надлишковий тиск притискання, а другий ряд має недостатній тиск притискання, потенційні економічні витрати для першого рядка (через втрату глибини і потенційне внесення насіння поверх ґрунту), як правило, є вищими, ніж потенційні економічні витрати для другого рядка (внаслідок надлишкового ущільнення ґрунту або неналежного визначення борозни). В альтернативному варіанті способу 450, замість збереження поточного тиску підйому на етапі 436, коли всі рядки знаходяться в межах необхідного діапазону, система виконує 4 UA 110988 C2 5 10 15 20 25 30 35 40 45 50 55 60 альтернативний спосіб 436, проілюстрований на Фігурі 4C. На етапі 462, монітор 42 усереднює тиск притискання в приводах 32. На етапі 464, монітор 42 порівнює середнє значення тиску притискання із середнім діапазонним робочим тиском 473 (Фігура 4D), пов'язаним з приводами 32. У деяких варіантах, середній діапазонний робочий тиск 473 становить половину від максимального робочого тиску 472. Якщо середній тиск притискання є нижчим, ніж середній діапазонний робочий тиск 473, то на етапі 468 монітор 42 дає команду на підвищення тиску підйому. Підвищення тиску підйому буде мати тенденцію до підвищення середнього тиску притискання на приводах 32. Подібним чином, якщо середній тиск притискання є вищим, ніж середній діапазонний робочий тиск 473, то на етапі 466 монітор 42 дає команду на зниження тиску підйому. Зниження тиску підйому буде мати тенденцію до зниження середнього тиску притискання на приводах 32. Слід мати на увазі в світлі даного опису, що підтримування середнього тиску притискання у приводах 32 на рівні або біля середнього діапазонного робочого тиску 473 приводів дозволить системі більш ефективно реагувати на зміни необхідного чистого тиску. Таким чином, якщо середній тиск притискання по суті дорівнює середньому діапазонному робочому тиску 473, то на етапі 470 монітор 42 зберігає поточний тиск підйому. У способі 420, описаному вище з посиланням на Фігуру 4А, тиск підйому отримують безпосередньо способом "регулювання на випередження" і він використовується (на додаток до виміру поточної притискної сили) при визначенні нового заданого тиску підйому. Проте, на етапі 406 етап отримання поточного тиску підйому може бути усунутий в деяких варіантах способу 420, в результаті чого формується система зворотного зв'язку, в якій впливи змін тиску підйому враховуються після того як вони впливають на вимір поточної притискної сили. У таких варіантах, етап визначення необхідного чистого тиску на етапі 404 також може бути усунутий таким чином, щоб монітор 42 просто визначав новий тиск притискання (або зміну тиску притискання) на основі виміру поточної притискної сили. Альтернативні системи та способи регулювання У варіантах системи на Фігурах 3А та 3В, тиск притискання регулюється індивідуально, тоді як тиск підйому регулюється одним пристроєм регулювання. Проте, в інших варіантах тиск підйому регулюється індивідуально, тоді як тиск притискання у всіх рядках регулюється одним пристроєм регулювання. Проте, якщо одна сторона приводу 32 має регулюватися на основі кожного рядка, бажано здійснювати регулювання в камерах тиску притискання індивідуально (як на Фігурах 3А і 3В), оскільки забезпечення глибини шляхом своєчасного додавання притискної сили, в разі потреби, є більш економічно доцільним та важливим з агрономічної точки зору, ніж своєчасне усунення надлишкової притискної сили. У ще інших варіантах виконання, як тиск підйому, так і тиск притискання можуть регулюватися індивідуально за допомогою двох клапанів зниження-скидання тиску, пов'язаних з кожним рядком. Такі варіанти передбачають значно збільшену вартість системи, оскільки додатковий клапан має використовуватися для кожного рядка на сівалці. Подібним чином, тиск підйому може регулюватися спільно для будь-якої кількості рядків від двох до кількості рядків на поперечному брусі (наприклад, тиск підйому може регулювати окремо для кожної з трьох секцій сівалки). В інших варіантах виконання системи регулювання 300, проілюстрованих на Фігурі 3, пристрій регулювання тиску підйому 310 і пристрої регулювання тиску притискання 320 містять електрогідравлічні сервоклапани регулювання потоку. У таких варіантах, кожний сервоклапан регулювання потоку переважно має електричний зв'язок з монітором 42. У ще інших варіантах, пристрій регулювання тиску підйому 310 і пристрої регулювання тиску притискання 320, кожен містить, як електрогідравлічний сервоклапан регулювання потоку, так і датчик тиску, який має гідравлічний зв'язок з датчиком тиску. У таких варіантах, кожний сервоклапан регулювання потоку і кожний з датчиків тиску переважно мають електричний зв'язок з монітором 42. У способі 400, описаному вище, спосіб 420 регулювання тиску притискання містить контур зворотного зв'язку, в якому вхідним значенням є вимір поточної притискної сили від кожного рядка. Проте, слід розуміти, що у варіантах, де тиск підйому у кожному приводі регулюється на основі кожного рядка, а тиск притискання регулюється загальним пристроєм регулювання, тиск підйому переважно визначають за допомогою контуру зворотного зв'язку, подібного до способу 420, з використанням виміру поточної притискної сили від кожного рядка. У таких варіантах, тиск притискання переважно регулюють способом, подібним до способу 450, але з моніторингом тиску підйому, заданого кожному рядку з метою визначення і задання загального тиску притискання. У варіантах виконання, в яких, як тиск підйому, так і тиск притискання кожного приводу, регулюються за допомогою окремих пристроїв регулювання на кожному рядку, як тиск 5 UA 110988 C2 5 10 15 20 25 30 35 40 45 50 55 60 притискання, так і тиск підйому кожного приводу, переважно регулюються способом, подібним до способу 420. Як проілюстровано у способі 700 на Фігурі 7, тиск підйому може регулюватися шляхом порівняння будь-якого критерію, пов'язаного з глибиною проникнення у ґрунт дисків сошника на кожному рядку, з необхідним діапазоном. Слід зазначити, що у варіанті на Фігурах 4А і 4В, критерій проникнення у ґрунт дорівнює (або є похідним від) заданому тиску притискання на кожному рядку. Проте, в інших варіантах цей критерій може бути пов'язаним (або похідним від) з будь-яким з наступних показників, без обмеження: команда чистого тиску (як визначено на етапі 404 на Фігурі 4А), дані зчитування з датчика 52 (який вказує вертикальну силу на копіювальних колесах 18 на кожному рядку), або фактичний тиск притискання у притискній камері 33 кожного приводу 32 (виміряний, наприклад, за допомогою датчика тиску 800, такого, як пропонується компанією "Gems Sensors and Controls" з міста Плейнвіль (Plainville), штату Коннектикут – які включені до кожного приводу, як проілюстровано на Фігурі 8). Незалежно від того, який критерій було отримано на етапі 732, критерій на кожному рядку, переважно, порівнюється з необхідним діапазоном на етапі 734. Якщо критерій проникнення у ґрунт знаходиться в межах діапазону для всіх рядків, то поточний тиск підйому зберігається на етапі 736. Якщо критерій проникнення у ґрунт знаходиться поза межами діапазону для будь-якого рядка, то на етапі 738 монітор 42 визначає, чи критерій проникнення у ґрунт є високим або низьким для кожного рядка. Якщо критерій проникнення у ґрунт, принаймні, для одного рядка є високим (вказуючи на те, що більша сила потрібна для проникнення у ґрунт на необхідну глибину), і не є низьким для будьяких рядків, то тиск підйому знижується на етапі 740. Якщо критерій проникнення у ґрунт, принаймні, для одного рядка є низьким (вказуючи на те, що більша сила застосовується, ніж потрібно для проникнення у ґрунт на необхідну глибину) і не є високим для будь-яких рядків, то тиск підйому підвищується на етапі 744. Якщо критерій проникнення у ґрунт, принаймні, для одного рядка є низьким і є високим, принаймні, для одного іншого рядка, то тиск підйому переважно знижується на етапі 742, оскільки, як обговорювалося тут, економічні витрати внаслідок надлишкового тиску притискання, як правило, є меншими, ніж витрати, пов'язані з втратою глибини. Слід мати на увазі, що на етапі 742, система регулювання 300 обирає одну з двох небажаних дій (наприклад, обирає зниження тиску підйому, а не підвищення тиск підйому) на основі оціночної економічної чи агрономічної вартості обох небажаних дій. В інших варіантах, відносний економічний збиток від втрати глибини на певній кількості рядків порівнюється зекономічним збитком від надлишкової притискної сили на іншій кількості рядків, і тиск підйому змінюється на основі цього порівняння. У кожному випадку, на етапі 746 заданий тиск підйому переважно зберігається у пам'яті для використання при визначенні необхідного тиску притискання на кожному рядку (як проілюстровано на Фігурі 4А). В той час, як спосіб 700 визначає відповідний тиск підйому, як описано вище, необхідний тиск притискання на кожному рядку переважно визначається і задається, як описано тут з посиланням на Фігуру 4А. Таким чином слід розуміти в світлі даного опису, що, коли критерій проникнення у ґрунт є показанням від датчика 52 (тобто, вертикальна сила на копіювальних колесах 18), вище показання датчика буде відповідати меншій необхідній силі проникнення (і навпаки), таким чином, що критерій проникнення у ґрунт, який є похідним від показань датчика, переважно знаходиться у зворотній залежності від показань датчика, і може бути отриманий, наприклад, шляхом інвертування показання датчика. Слід мати на увазі у світлі даного опису, що, хоча даний критерій проникнення у ґрунт може бути пов'язаним з характеристиками ґрунту, такими як твердість або вологість ґрунту, такий критерій може замінюватися на постійні характеристики ґрунту. Наприклад, коли вага окремого рядного висівного апарату 10 зменшується внаслідок внесення насіння та інших речовин під час операцій сівби, може знадобитися більше допоміжної сили для проникнення у ґрунт дисків сошника 12. Крім того, критерій проникнення у ґрунт може являти собою або допоміжну силу, необхідну для проникнення у ґрунт, або величину прикладеної сили, що перевищує силу, необхідну для проникнення у ґрунт, наприклад, у деяких варіантах величина позитивного критерію може бути пов'язана з величиною додаткової сили, необхідної для проникнення у ґрунт, в той час як величина негативного критерію може бути пов'язана з величиною прикладеної сили, що перевищує силу, необхідну для проникнення у ґрунт. У деяких варіантах, критерій може бути булевою змінною, наприклад, він може мати одне з двох значень залежно від того, чи мало місце проникнення у ґрунт на повну глибину; такі варіанти можуть використовувати контактний перемикач (наприклад, розташований між тягами 36 копіювального колеса 36 і стопором 60) для визначення, чи діє будь-яка сила на копіювальні колеса 18 з боку ґрунту. Слід також мати на увазі в світлі даного опису, що в альтернативних способах, для 6 UA 110988 C2 5 10 15 20 25 30 35 40 45 50 55 визначенні відповідного тиску підйому можуть використовуватися множинні критерії проникнення ґрунту. Крім цього, величина коригувань з прирощенням щодо тиску підйому і тиску притискання, як описано тут, може бути визначена за допомогою пропорційно-інтегрально-диференційних (ПІД), пропорційно-інтегральних (ПІ) або подібних контролерів, які є відомими в даній галузі техніки. Система притискної сили на основі двоступеневого гідроциліндру Альтернативний варіант виконання системи регулювання 300 проілюстровано на Фігурі 3C. Проілюстровані два рядки. У системі регулювання 300" відповідно до Фігури 3C, кожен привід 32 замінюється двоступеневим приводом 500. Двоступеневий привід 500 включає в себе підйомну камеру 535, основну притискну камеру 515 і допоміжну притискну камеру 525. Основні притискні камери 515 двоступеневих приводів 500 переважно мають гідравлічний зв'язок з отвором подачі гідравлічної рідини і зворотним отвором гідравлічної рідини 376, 374 через індивідуальні пристрої регулювання тиску притискання 320. Підйомні камери 535 переважно мають гідравлічний зв'язок з отвором подачі гідравлічної рідини і зворотним отвором гідравлічної рідини 376, 374 через загальний пристрій регулювання тиску підйому 310. Допоміжні притискні камери 525 переважно мають гідравлічний зв'язок з отвором подачі гідравлічної рідини і зворотним отвором гідравлічної рідини 376, 374 через загальний пристрій регулювання допоміжного тиску притискання 315. Пристрої регулювання 310, 315, 320 можуть містити клапани зниження-скидання тиску. Монітор 42 має електричний зв'язок з пристроями регулювання 310, 315, 320, переважно за допомогою електричного з'єднання із соленоїдом, пов'язаним з кожним пристроєм регулювання. Двоступеневий привід 500 проілюстрований більш детально на Фігурах 5A і 5B. Привід 500 містить головку 560 і шток 550. Головка 560 включає в себе основну притискну камеру 515, що має гідравлічний зв'язок з отвором основної притискної камери 510, допоміжну притискну камеру 525, що має гідравлічний зв'язок з отвором допоміжної притискної камери 520, і підйомну камеру 535, що має гідравлічний зв'язок з отвором підйомної камери 530. Шток 550 змонтований на внутрішньому штоку 540. Внутрішній шток 540 розміщується з можливістю ковзання в головці 560. Внутрішній шток 540 має верхню кільцеву поверхню 544, яка утворює верхню поверхню підйомної камері 535. Внутрішній шток 540 має нижню кільцеву поверхню 542, яка утворює нижню поверхню допоміжної притискної камери 525. Внутрішній шток 540 також має поверхню основної притискної камери 541, яка поширюється в основну притискну камеру 525. Головка 560 переважно має монтажний отвір 590 для кріплення до поперечного брусу 2. Як проілюстровано щодо приводу 32 відповідно до Фігури 1А, шток 550 переважно кріпиться до рядного висівного апарату 10 для передачі вертикальних сил від поперечного брусу 2 до рядного висівного апарату 10. Під час роботи двоступеневого приводу 500, тиск підвищується в підйомній камері 535, підвищений тиск на верхній кільцевій поверхні 544 створює підіймальну силу, що діє на внутрішній шток 540 і, таким чином, на шток 550. По мірі підвищення тиску в основній притискній камері 515, підвищений тиск на поверхні 541 основної притискної камери створює притискну силу, що діє на внутрішній шток 540 і, таким чином, на шток 550. По мірі підвищення тиску у допоміжній притискній камері 525, підвищений тиск на нижній кільцевій поверхні 542 створює притискну силу, що діє на внутрішній шток 540 і, таким чином, на шток 550. Посилаючись на Фігуру 5C, поверхні 541, 542, 544 мають площу поверхні A541, A542, A544, відповідно. Аналогічно, змінний тиск гідравлічної рідини в камерах 515, 525, 535, позначений номерами позицій Р515, P525, P535, відповідно. Таким чином, чиста вертикальна сила F, що діє на шток 550, може бути виражена за допомогою наступного виразу: Слід розуміти в світлі даного опису, що двоступеневий привід 500 дозволяє системі регулювання функціонувати з меншим кумулятивним потоком гідравлічної рідини. Менші, більш часті коригування чистої вертикальної сили F можуть здійснюватися шляхом регулювання основного тиску притискання, тоді як більші коригування притискної сили можуть виконуватися шляхом регулювання допоміжного тиску притискання, коли це необхідно. По мірі того, як діаметр D540 внутрішнього штоку 540 збільшується (тобто, по мірі того, як площа A541 збільшується і площа A542 зменшується), максимальна змінна притискна сила на рядок збільшується, а величина потоку, розподіленого між циліндрами 500, зменшується. Способи керування двоступеневим гідроциліндром Під час роботи системи регулювання 300" відповідно до Фігури 3C, пристрій регулювання основного тиску притискання 310 забезпечує індивідуальний основний тиск притискання на кожному приводі 500. Коли необхідний загальний тиск притискання для будь-якого рядка є 7 UA 110988 C2 5 10 15 20 25 30 35 40 45 50 55 60 більшим, ніж тиск, який може бути забезпечено за допомогою індивідуального тиску головки, пристрій регулювання допоміжного тиску притискання 315 підвищує загальний допоміжний тиск притискання у допоміжній притискній камері 525 для всіх рядків. Як і в системі регулювання на Фігурах 3А і 3B, коли необхідний загальний тиск притискання для будь-якого рядка є негативним, пристрій регулювання тиску підйому 310 підвищує загальний тиск підйому в підйомній камері 535 для всіх рядків. Переважний спосіб 600 керування системою регулювання 300" відповідно до Фігури 3С проілюстрований на Фігурах 6A і 6B. Посилаючись на Фігуру 6А, способи 620 використовуються для задання основного тиску притискання для кожного рядка, на основі виміру притискної сили на цьому рядку, і переважно на основі тиску підйому і допоміжного тиску притискання, які подаються на упередження за допомогою способу 650 (Фігура 6B). На етапі 602, монітор 42 отримує вимір поточної притискної сили для рядка від відповідного датчика 52. На етапі 604, монітор 42 визначає необхідний чистий тиск переважно на основі виміру поточної притискної сили. Чистий тиск є сумою значень тиску притискання у основній і допоміжній притискних камерах 515, 525, за винятком тиску підйому у підйомній камері 535. Для того щоб визначити основний тиск притискання, потрібний для отримання необхідного чистого тиску, монітор 42 отримує поточній заданий тиск підйому і допоміжний тиск притискання на етапі 606. На етапі 608, монітор 42 визначає заданий основний тиск притискання на основі поточного заданого основного тиску притискання і тиску підйому, і необхідного чистого тиску. На етапі 610, монітор 42 надсилає сигнал керування на пристрій регулювання 320, пов'язаний із заданим основним тиском притискання. На етапі 612, монітор 42 переважно зберігає новий заданий основний тиск притискання в пам'яті. Слід мати на увазі, що способи 620 є подібними до способів 420, описаних тут, за винятком того, що, як заданий тиск підйому, так і допоміжний тиск притискання, беруться до уваги, а основний тиск притискання задається командою регулювання. Звертаючись до Фігури 6В, проілюстровано спосіб 650 визначення тиску підйому і допоміжного тиску притискання. На етапі 632, монітор 42 отримує поточний заданий основний тиск притискання для кожного рядка. Поточний заданий основний тиск притискання переважно зберігається в пам'яті за допомогою способу 620, як описано тут з посиланням на Фігуру 6А. На етапі 634, монітор 42 визначає, чи основний тиск притискання у будь-якому з приводів 500 знаходиться поза межами необхідного діапазону. Необхідний діапазон може бути подібним до будь-якого з необхідних діапазонів, описаних щодо Фігури 4D, за винятком того, що необхідний діапазон є пов'язаним з основною притискною камерою 515. Якщо основний тиск притискання знаходиться в межах необхідного діапазону для всіх приводів, то на етапі 636 монітор 42 переважно підтримує поточний заданий допоміжний тиск притискання і тиск підйому, та на етапі 646 переважно зберігає поточний заданий допоміжний тиск притискання і тиск підйому в пам'яті. Якщо тиск притискання знаходиться за межами необхідного діапазону, принаймні, для одного приводу, тоді на етапі 638 монітор 42 визначає, чи один або більше рядків знаходяться вище або нижче необхідного діапазону. Якщо принаймні один рядок знаходиться нижче необхідного діапазону і жоден з рядків не знаходиться вище необхідного діапазону, то на етапі 643 монітор 42 переважно знижує заданий допоміжний тиск притискання. На етапі 644, монітор 42 визначає, чи заданий допоміжний тиск притискання є негативним. Якщо заданий допоміжний тиск притискання є негативним, то на етапі 645 монітор 42 переважно підвищує заданий тиск підйому, і на етапі 646 переважно зберігає поточний заданий тиск підйому і допоміжний тиск притискання в пам'яті. Якщо заданий допоміжний тиск притискання не є негативним, то на етапі 646 монітор 42 переважно зберігає поточний заданий тиск підйому і допоміжний тиск притискання в пам'яті без корегування заданого допоміжного тиску притискання. Якщо принаймні один рядок знаходиться вище необхідного діапазону і жоден з рядків не знаходиться нижче необхідного діапазону, то на етапі 640 монітор 42 переважно дає команду на зниження тиску підйому. На етапі 649, монітор 42 переважно визначає, чи отриманий заданий тиск підйому є негативним. Якщо поточний заданий тиск підйому є негативним, то на етапі 652 монітор 42 переважно дає команду на підвищення допоміжного тиску притискання, і на етапі 646 переважно зберігає поточний заданий допоміжний тиск притискання і тиск підйому в пам'яті. Якщо поточний заданий тиск підйому не є негативним, то на етапі 646 монітор 42 переважно зберігає поточний заданий допоміжний тиск притискання і тиск підйому в пам'яті без зміни допоміжного тиску притискання. Якщо принаймні один рядок знаходиться вище необхідного діапазону, і принаймні один рядок знаходиться нижче необхідного діапазону, то на етапі 642 монітор 42 переважно дає команду на зниження тиску підйому. На етапі 649, монітор 42 переважно визначає, чи 8 UA 110988 C2 5 10 15 20 25 30 35 40 45 50 55 60 отриманий заданий тиск підйому є негативним. Якщо поточний заданий тиск підйому є негативним, то на етапі 652 монітор 42 переважно дає команду на підвищення допоміжного тиску притискання і на етапі 646 переважно зберігає поточний заданий допоміжний тиск притискання і тиск підйому в пам'яті. Якщо поточний заданий тиск підйому не є негативним, то на етапі 646 монітор 42 переважно зберігає поточний заданий допоміжний тиск притискання і тиск підйому в пам'яті без зміни допоміжного тиску притискання. Слід розуміти в світлі даного опису, що спосіб 650, переважно не створює тиск у підйомних камерах і допоміжних притискних камерах одночасно. Спосіб 650 знижує допоміжний тиск притискання до нуля, перш ніж підвищити тиск підйому. По мірі того, як заданий тиск підйому стає більш негативним, тиск підйому, визначений на етапі 645 збільшується. Подібним чином, спосіб 650 знижує тиск підйому до нуля, переш ніж підвищити допоміжний тиск притискання. По мірі того, як заданий тиск підйому стає більш негативним, допоміжна притискна сила, визначена на етапі 652 збільшується. Регенеративні системи регулювання Як описано вище, система регулювання 300' відповідно до Фігури 3C забезпечує, або загальний тиск підйому, або загальний допоміжний тиск притискання для всіх рядків. У деяких варіантах, монітор 42 може визначити, що тиск підйому потрібен, коли наразі застосовується допоміжний тиск притискання, і навпаки. Для того щоб зменшити час і потік рідини, необхідних для припинення застосування допоміжного тиску притискання і початку застосування тиску підйому (або навпаки), система регулювання 300" відповідно до Фігури 3D вибірково дозволяє здійснювати регенерацію (тобто прямий потік) між допоміжними притискними камерами 525 і підйомними камерами 535. У системі регулювання 300" відповідно до Фігури 3D, допоміжні притискні камери мають гідравлічний зв'язок за допомогою пристрою регулювання 317. Пристрій регулювання 317 переважно являє собою двонаправлений електромагнітний тарілчастий клапан і клапан регулювання потоку, але в деяких варіантах містить нерегульований отвір. Пристрій регулювання 311 має гідравлічний зв'язок з пристроєм регулювання тиску підйому 310 і підйомними камерами 535. Пристрій регулювання 316 має гідравлічний зв'язок з пристроєм регулювання допоміжного тиску притискання 315 і допоміжними притискними камерами 525. Пристрої регулювання 311, 316 переважно являються собою двонаправлені електромагнітні тарілчасті клапани, такі як модель № SV08-28, що пропонуються компанією "HydraForce" з Лінкольнширу (Lincolnshire), штат Іллінойс (Illinois). Соленоїди пристроїв регулювання 311, 316, 317 мають електричний зв'язок з монітором 42. Під час роботи системи регулювання 300" відповідно до Фігури 3D, монітор 42 змінює робочі параметри пристроїв регулювання 311, 316, 317, з метою забезпечення потоку між допоміжними притискними камерами 525 і підйомними камерами 535. З метою забезпечення потоку гідравлічної рідини від допоміжної притискної камери 525 до підйомної камери 535, пристрій регулювання 311 відкривається (або залишається відкритим), пристрій регулювання 316 закривається, і пристрій регулювання 317 відкривається. З метою забезпечення потоку гідравлічної рідини від підйомної камери 535 до допоміжної притискної камери 525, пристрій регулювання 311 закривається, пристрій регулювання 316 відкривається (або залишається відкритим), і пристрій регулювання 317 відкривається. Для запобігання регенеративного потоку, пристрій регулювання 317 закривається, і пристрої регулювання 311, 316 відкриваються (або залишаються відкритими), ефективно перетворюючи систему регулювання 300" відповідно до Фігури 3D на систему регулювання 300 відповідно до Фігури 3C. Попри те, що системи, способи і пристрій, які описано тут, в основному описані як гідравлічні, слід розуміти, що даний опис може бути використаний для реалізації аналогічної пневматичної системи. Наприклад, у деяких варіантах циліндри, описані тут, будуть замінені пневматичними циліндрами або пневматичними подушками, а клапани, описані тут, будуть замінені пневматичними клапанами, що мають еквівалентні функціональні можливості. Слід також розуміти, що сівалка 1 з рядними висівними апаратами 10 може бути будь-яким сільськогосподарським начіпним знаряддям з апаратами, розташованими поперечно з певним інтервалом, які переміщуються вертикально по відношенню до поперечного брусу, і де бажано забезпечити змінну притискну силу щодо апаратів, розташованих поперечно з певним інтервалом. Вищенаведений опис представлено для того, щоб дозволити будь-якому середньому фахівцеві в даній галузі техніки втілити і використовувати даний винахід, і надається в контексті патентної заявки та її вимог. Різні модифікації переважного варіанту реалізації пристрою, і загальні принципи та ознаки системи і способів, описаних тут, будуть очевидно вираженими для фахівців даної галузі техніки. Таким чином, даний винахід не обмежується варіантами 9 UA 110988 C2 пристрою, системи і способів, описаними вище і проілюстрованими на фігурах, але має відповідати найширшому обсягу відповідно до сутності та обсягу пунктів формули винаходу, що додається. 5 10 15 20 25 30 35 40 45 50 55 60 ФОРМУЛА ВИНАХОДУ 1. Система для застосування притискної сили до сільськогосподарського начіпного знаряддя, яке має багаторядні висівні апарати, що включає в себе: перший привід, при цьому зазначений перший привід призначений для застосування сили до першого рядного висівного апарата, при цьому зазначений перший привід включає в себе першу притискну камеру і першу підйомну камеру, при цьому тиск у зазначеній першій притискній камері має тенденцію протистояти тиску у зазначеній першій підйомній камері; другий привід, при цьому зазначений другий привід призначений для застосування сили до другого рядного висівного апарата, при цьому зазначений другий привід включає в себе другу притискну камеру і другу підйомну камеру, при цьому тиск у зазначеній другій притискній камері має тенденцію протистояти тиску у зазначеній другій підйомній камері; перший пристрій регулювання тиску притискання, який має гідравлічний зв'язок із зазначеною першою притискною камерою для регулювання тиску у зазначеній першій притискній камері, при цьому зазначений перший пристрій регулювання тиску притискання виконаний з можливістю підтримки, як вибраного першого тиску притискання, будь-якого безперервного діапазону значень тиску у зазначеній першій притискній камері; другий пристрій регулювання тиску притискання, який має гідравлічний зв'язок із зазначеною другою притискною камерою для регулювання тиску у зазначеній другій притискній камері, при цьому зазначений другий пристрій регулювання тиску притискання виконаний з можливістю підтримки, як вибраного другого тиску притискання, будь-якого безперервного діапазону значень тиску у зазначеній другій притискній камері, де зазначений вибраний другий тиск притискання відрізняється від зазначеного вибраного першого тиску притискання; пристрій регулювання тиску підйому, який має гідравлічний зв'язок як із зазначеною першою підйомною камерою, так із зазначеною другою підйомною камерою, для регулювання тиску у зазначеній першій підйомній камері і у зазначеній другій підйомній камері, при цьому зазначений пристрій регулювання тиску підйому виконаний з можливістю підтримки, як вибраного тиску підйому, будь-якого безперервного діапазону значень тиску як у зазначеній першій підйомній камері, так і у зазначеній другій підйомній камері, де зазначений вибраний тиск підйому відрізняється від зазначеного вибраного першого тиску притискання і зазначеного вибраного другого тиску притискання; і схему обробки, яка має електричний зв'язок із зазначеним першим пристроєм регулювання тиску притискання, із зазначеним другим пристроєм регулювання тиску притискання і зазначеним пристроєм регулювання тиску підйому, при цьому зазначена схема обробки виконана з можливістю зміни робочого стану зазначеного першого пристрою регулювання тиску притискання, зазначеного другого пристрою регулювання тиску притискання і зазначеного пристрою регулювання тиску підйому. 2. Система за п. 1, в якій зазначена схема обробки додатково виконана з можливістю: визначати перший критерій проникнення у ґрунт, пов'язаний із зазначеним першим рядним висівним апаратом; визначати другий критерій проникнення у ґрунт, пов'язаний із зазначеним другим рядним висівним апаратом; визначати, чи або зазначений перший критерій проникнення у ґрунт, або зазначений другий критерій проникнення у ґрунт перевищує заданий діапазон; і зменшити тиск у зазначеній першій підйомній камері і зазначеній другій підйомній камері, коли або зазначений перший критерій проникнення у ґрунт, або зазначений другий критерій проникнення у ґрунт перевищує зазначений заданий діапазон. 3. Система за п. 1, яка додатково включає в себе: перший датчик притискної сили, пов'язаний із зазначеним першим рядним висівним апаратом, при цьому зазначений перший датчик притискної сили має електричний зв'язок із зазначеною схемою обробки, при цьому зазначений перший датчик притискної сили виконаний з можливістю генерування першого сигналу притискної сили, пов'язаного із силою між ґрунтом і зазначеним першим рядним висівним апаратом; і другий датчик притискної сили, пов'язаний із зазначеним другим рядним висівним апаратом, при цьому зазначений другий датчик притискної сили має електричний зв'язок із зазначеною схемою обробки, при цьому зазначений другий датчик притискної сили виконаний з можливістю 10 UA 110988 C2 5 10 15 20 25 30 35 40 45 50 55 60 генерування другого сигналу притискної сили, пов'язаного із силою між ґрунтом і зазначеним другим рядним висівним апаратом. 4. Система за п. 3, в якій зазначена схема обробки додатково виконана з можливістю: вибрати та задати тиск у зазначеній першій притискній камері на основі зазначеного першого сигналу притискної сили; і вибрати та задати тиск у зазначеній другій притискній камері на основі зазначеного другого сигналу притискної сили. 5. Система за п. 2, яка додатково включає в себе: перший датчик притискної сили, пов'язаний із зазначеним першим рядним висівним апаратом, при цьому зазначений перший датчик притискної сили має електричний зв'язок із зазначеною схемою обробки, при цьому зазначений перший датчик притискної сили виконаний з можливістю генерування першого сигналу притискної сили, пов'язаного із силою між ґрунтом і зазначеним першим рядним висівним апаратом; і другий датчик притискної сили, пов'язаний із зазначеним другим рядним висівним апаратом, при цьому зазначений другий датчик притискної сили має електричний зв'язок із зазначеною схемою обробки, при цьому зазначений другий датчик притискної сили виконаний з можливістю генерування другого сигналу притискної сили, пов'язаного із силою між ґрунтом і зазначеним другим рядним висівним апаратом, при цьому зазначена схема обробки додатково виконана з можливістю визначення тиску у зазначеній першій притискній камері на основі зазначеного першого сигналу притискної сили і визначення тиску у зазначеній другій притискній камері на основі зазначеного другого сигналу притискної сили. 6. Система за п. 5, в якій зазначена схема обробки додатково виконана з можливістю: визначити, чи або зазначений перший критерій проникнення у ґрунт, або зазначений другий критерій проникнення у ґрунт є меншим, ніж заданий діапазон, і підвищити тиск у зазначеній першій підйомній камері і у зазначеній другій підйомній камері, коли або зазначений перший критерій проникнення у ґрунт, або зазначений другий критерій проникнення у ґрунт є меншим, ніж зазначений заданий діапазон, і коли ні зазначений перший критерій проникнення у ґрунт, ні зазначений другий критерій проникнення у ґрунт не перевищують зазначений заданий діапазон. 7. Система за п. 6, в якій зазначений перший датчик притискної сили містить штифт вимірювання навантаження. 8. Система за п. 6, в якій зазначена схема обробки додатково виконана з можливістю підтримувати тиск у зазначеній першій притискній камері і зазначеній другій притискній камері, коли як зазначений перший критерій проникнення у ґрунт, так і зазначений другий критерій проникнення у ґрунт знаходяться в межах зазначеного заданого діапазону. 9. Спосіб регулювання сили, що застосовується до першого сільськогосподарського рядного висівного апарата за допомогою першого приводу, який має першу камеру і другу камеру, і регулювання сили, що застосовується до другого сільськогосподарського рядного висівного апарата за допомогою другого приводу, який має третю камеру і четверту камеру, який включає в себе: підтримування першого вибраного тиску в першій камері шляхом зміни робочого стану першого пристрою регулювання, який має гідравлічний зв'язок з першою камерою; підтримування другого вибраного тиску в третій камері шляхом зміни робочого стану другого пристрою регулювання, який має гідравлічний зв'язок з третьою камерою, і підтримування третього вибраного тиску в другій камері і четвертій камері шляхом зміни робочого стану третього пристрою регулювання, який має гідравлічний зв'язок з другою камерою і четвертою камерою, де зазначений третій вибраний тиск відрізняється від зазначеного першого вибраного тиску і зазначеного другого вибраного тиску. 10. Спосіб за п. 9, який додатково включає в себе: визначення першого критерію проникнення у ґрунт, пов'язаного з першим рядним висівним апаратом; визначення другого критерію проникнення у ґрунт, пов'язаного з другим рядним висівним апаратом; визначення, чи або зазначений перший критерій проникнення у ґрунт, або зазначений другий критерій проникнення у ґрунт перевищує заданий діапазон; і зменшення зазначеного третього вибраного тиску, коли або зазначений перший критерій проникнення у ґрунт, або зазначений другий критерій проникнення у ґрунт перевищує зазначений заданий діапазон. 11. Спосіб за п. 9, який додатково включає в себе: 11 UA 110988 C2 5 10 15 20 25 генерування першого сигналу притискної сили, пов'язаного із силою між ґрунтом і першим рядним висівним апаратом, і генерування другого сигналу притискної сили, пов'язаного із силою між ґрунтом і другим рядним висівним апаратом. 12. Спосіб за п. 9, який додатково включає в себе: генерування першого сигналу притискної сили, пов'язаного із силою між ґрунтом і першим рядним висівним апаратом; і генерування другого сигналу притискної сили, пов'язаного із силою між ґрунтом і другим рядним висівним апаратом; вибір та задання тиску у першій камері на основі зазначеного першого сигналу притискної сили; і вибір та задання тиску у третій камері на основі зазначеного другого сигналу притискної сили. 13. Спосіб за п. 10, який додатково включає в себе: визначення, чи або зазначений перший критерій проникнення у ґрунт, або зазначений другий критерій проникнення у ґрунт є меншим, ніж заданий діапазон; і підвищення зазначеного третього тиску, коли або зазначений перший критерій проникнення у ґрунт, або зазначений другий критерій проникнення у ґрунт є меншим, ніж зазначений заданий діапазон, і коли ні зазначений перший критерій проникнення у ґрунт, ні зазначений другий критерій проникнення у ґрунт не перевищують зазначений заданий діапазон. 14. Спосіб за п. 13, який додатково включає в себе: підтримування зазначеного третього тиску, коли як зазначений перший критерій проникнення у ґрунт, так і зазначений другий критерій проникнення у ґрунт знаходяться в межах зазначеного заданого діапазону. 15. Спосіб за п. 14, в якому зазначена перша камера і зазначена третя камера є притискними камерами зазначених першого і другого приводів, відповідно, і за яким зазначена друга камера і зазначена четверта камера є підйомними камерами зазначених першого і другого приводів, відповідно. 12 UA 110988 C2 13 UA 110988 C2 14 UA 110988 C2 15 UA 110988 C2 16 UA 110988 C2 17 UA 110988 C2 18 UA 110988 C2 19 UA 110988 C2 20 UA 110988 C2 21 UA 110988 C2 22 UA 110988 C2 23 UA 110988 C2 24 UA 110988 C2 25 UA 110988 C2 Комп’ютерна верстка А. Крижанівський Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 26
ДивитисяДодаткова інформація
Назва патенту англійськоюApparatus, systems and methods for row unit downforce control
Автори англійськоюSauder, Derek, A., Radtke, Ian, R., Stoller, Jason, J.
Автори російськоюСаудэр Дэрэк Э., Радтке Иан Р., Столлер Джэйсон Дж.
МПК / Мітки
МПК: A01B 63/114, A01C 5/06, A01B 63/111, A01B 13/08, A01C 7/18
Мітки: системі, притискної, регулювання, сили, пристрій, рядного, висівного, апарата, способи
Код посилання
<a href="https://ua.patents.su/28-110988-pristrijj-sistemi-i-sposobi-regulyuvannya-pritiskno-sili-ryadnogo-visivnogo-aparata.html" target="_blank" rel="follow" title="База патентів України">Пристрій, системи і способи регулювання притискної сили рядного висівного апарата</a>
Пристрій для поодинокого відбору насіння висівного апарата
Номер патенту: 20832
Опубліковано: 07.10.1997
Автори: Сисолін Петро Васильович, Хроліков Олексій Вікторович, Калашник Алла Леонідівна, Кравченко Володимир Іванович
МПК: A01C 7/04
Мітки: пристрій, висівного, поодинокого, насіння, апарата, відбору
Формула / Реферат:
1. Пристрій для поодинокого відбору насіння висівного апарата, що вміщує корпус, диск з присмоктуючими комірками, встановлений на валу, прокладку і кришку з підковоподібною канавкою і розташованою в ній камерою розрідження, який відрізняється тим. що зовнішня поверхня канавки прокладки, що встановлена з боку камери розрідження, в зоні транспортування насіння до верхньої частини корпуса виконана по окружності, яка дорівнює окружності осі, на...
Пристрій для протруювання насіння після висівного апарата сівалки
Номер патенту: 4365
Опубліковано: 17.01.2005
Автори: Пйонтик Магдалина Михайлівна, Матвієвська Ольга Дмитрівна, Закорчемний Мирон Степанович, Білянський Василь Володимирович
МПК: A01C 1/08
Мітки: висівного, сівалки, насіння, протруювання, пристрій, апарата
Формула / Реферат:
Пристрій для протруювання насіння після висівного апарата сівалки, що містить живильний резервуар для розчину протруйника, робочу камеру із вставленими в ній двома контактуючими між собою валиками, покритими зверху губчастим матеріалом, котрі обертаються назустріч один одному, який відрізняється тим, що робоча камера, нижня частина якої виконана у вигляді ванночки, містить поплавковий механізм для автоматичного підтримання заданого постійного...
Кріпильний пристрій для висівного апарата
Номер патенту: 79981
Опубліковано: 10.08.2007
Автори: Стоер Рандалл Уілліам, Маріман Натан Алберт
МПК: A01B 63/00
Мітки: пристрій, кріпильний, апарата, висівного
Формула / Реферат:
1. Кріпильний пристрій для висівного апарата, що містить паралелограмний важільний механізм (16) з верхньою і нижньою направляючими розпірками (52, 54), блокувальну розпірку (56), яка розташована між верхньою і нижньою направляючими розпірками (52, 54) і встановлена на направляючій розпірці (52), з можливістю повороту на верхній поворотній осі (58), і містить гак (70), причому нижня направляюча розпірка (54) містить направляючий елемент (72),...
Спосіб одержання і регулювання додаткової сили притискання коліс локомотива до рейкового шляху та пристрій для його реалізації
Номер патенту: 94631
Опубліковано: 25.05.2011
Автори: Біліченко Микола Якович, Денищенко Олександр Валерійович
МПК: B60D 1/00, B61C 15/04
Мітки: пристрій, шляху, регулювання, рейкового, реалізації, додаткової, локомотива, коліс, спосіб, притискання, сили, одержання
Формула / Реферат:
1. Спосіб одержання і регулювання додаткової сили притискання коліс шахтного локомотива до рейкового шляху в шахтному рухомому складі, що включає з'єднання вагонеток причіпним пристроєм з локомотивом, який відрізняється тим, що причіпний пристрій встановлюють під кутом до повздовжньої осі рейкового шляху і закріплюють кінцями до бокових поверхонь локомотива, потім задають додаткову силу притискання коліс шахтного локомотива до рейкового...
Спосіб одержання і регулювання додаткової сили притискання коліс локомотива до рейкового шляху
Номер патенту: 45501
Опубліковано: 10.11.2009
Автори: Денищенко Олександр Валерійович, Біліченко Микола Якович
МПК: B61C 15/00
Мітки: притискання, сили, спосіб, рейкового, локомотива, регулювання, коліс, додаткової, шляху, одержання
Формула / Реферат:
Спосіб одержання і регулювання додаткової сили притискання коліс шахтного локомотива до рейкового шляху в шахтному рухомому складі, що включає з'єднання вагонеток причіпним пристроєм з локомотивом, який відрізняється тим, що попередньо задають додаткову силу притискання коліс шахтного локомотива до рейкового шляху, що пропорційна силі опору состава і тангенсу кута установки причіпного пристрою до повздовжньої осі рейкового шляху, визначають...
Попередній патент: Механічна блокувальна система для панелей підлоги
Наступний патент: Зовнішня дробильна броня гравітаційної дробарки
Випадковий патент: Завадостійка багатопроменева антена