Передача пілот-сигналу та оцінка каналу для системи зв’язку, яка використовує мультиплексування з частотним розділенням каналів




Формула / Реферат
1. Пристрій для генерування пілот-сигналу в системі зв'язку, який містить:
блок обробки, призначений для генерування першої послідовності пілотних символів, основуючись на багатофазній послідовності; і
модулятор, призначений для одержання другої послідовності пілотних символів, основуючись на першій послідовності пілотних символів, і генерування послідовності виводжуваних символів, основуючись на другій послідовності пілотних символів, при цьому послідовність виводжуваних символів містить циклічний префікс і придатна для передачі через канал зв'язку.
2. Пристрій за п. 1, в якому модулятор призначений для застосування пилкоподібного фазового сигналу до другої послідовності пілотних символів і для генерування послідовності виводжуваних символів, основуючись на другій послідовності пілотних символів, після застосування пилкоподібного фазового сигналу.
3. Пристрій за п. 2, в якому модулятор також призначений для використання щонайменше двох різних кутів нахилу фази для пилкоподібного фазового сигналу щонайменше в двох різних періодах символу для передачі першої послідовності пілотних символів щонайменше в двох різних наборах частотних піддіапазонів.
4. Пристрій за п. 1, в якому модулятор призначений для відправлення послідовності виводжуваних символів у часовій ділянці через канал зв'язку.
5. Пристрій за п. 1, в якому багатофазна послідовність має сталу обвідну у часовій ділянці і рівномірну спектральну характеристику в частотній ділянці.
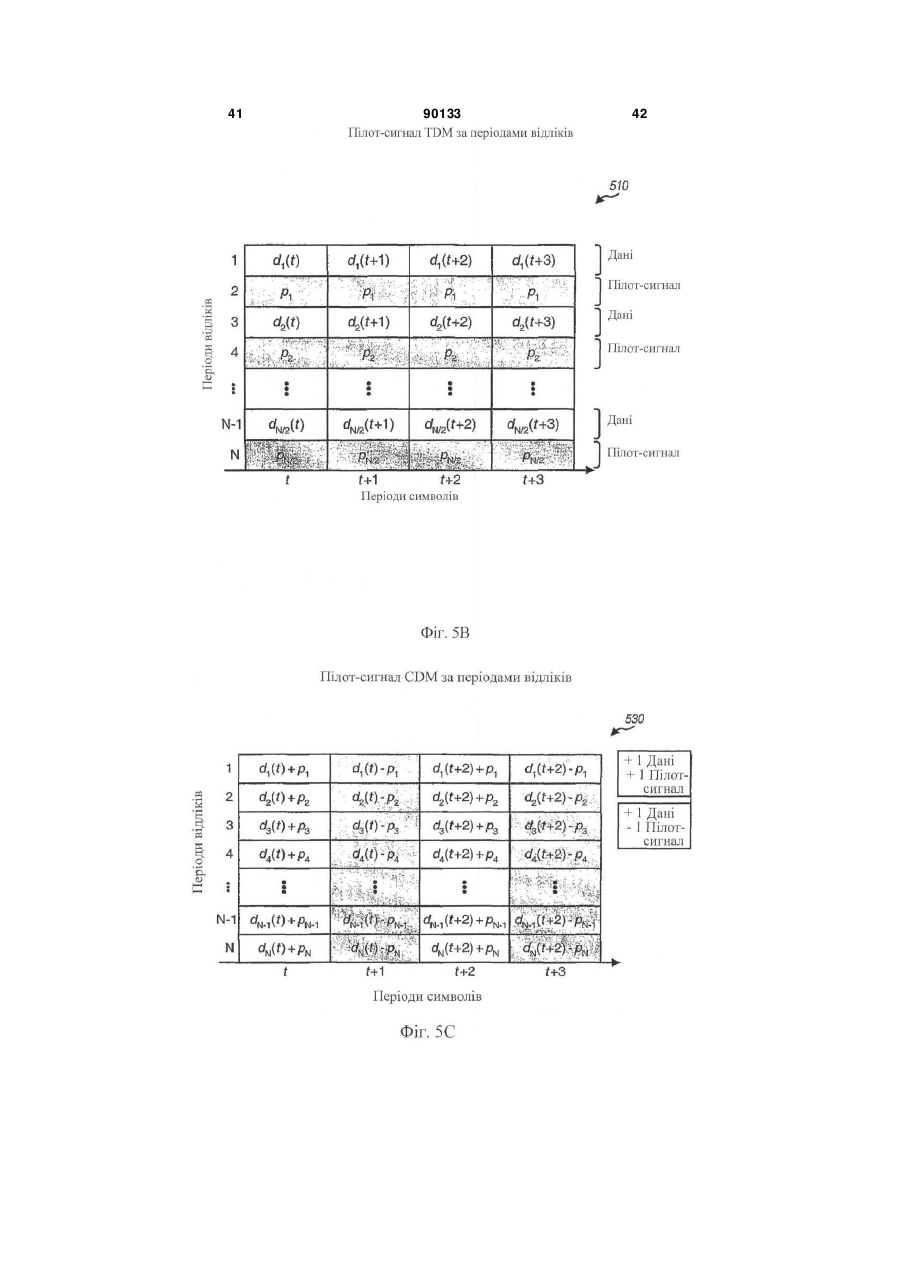
6. Пристрій за п. 1, в якому блок обробки призначений для формування першої послідовності символів даних, мультиплексування першої послідовності символів даних в першому періоді символу і мультиплексування першої послідовності пілотних символів у другому періоді символу.
7. Пристрій за п. 1, в якому блок обробки призначений для формування першої послідовності символів даних, мультиплексування першої послідовності пілотних символів з першою послідовністю символів даних і забезпечення послідовності мультиплексованих даних і пілотних символів.
8. Пристрій за п. 1, в якому блок обробки призначений для формування першої послідовності символів даних, множення першої послідовності символів даних на першу ортогональну послідовність для одержання множини послідовностей масштабованих символів даних, множення першої послідовності пілотних символів на другу ортогональну послідовність для одержання множини послідовностей масштабованих пілотних символів та об'єднання множини послідовностей масштабованих символів даних з множини послідовностей масштабованих пілотних символів для одержання множини послідовностей об'єднаних символів.
9. Пристрій за п. 1, в якому блок обробки призначений для формування першої послідовності символів даних, множення першої послідовності символів даних на першу ортогональну послідовність для одержання послідовності масштабованих символів даних, множення першої послідовності пілотних символів на другу ортогональну послідовність для одержання послідовності масштабованих пілотних символів та об'єднання послідовності масштабованих символів даних з послідовністю масштабованих пілотних символів для одержання послідовності об'єднаних символів.
10. Пристрій за п. 1, в якому першу послідовність пілотних символів посилають в першому наборі частотних піддіапазонів і в якому символи даних посилають у другому наборі частотних піддіапазонів, який містить більше частотних піддіапазонів, ніж перший набір.
11. Спосіб генерування пілот-сигналу в системі зв'язку, який містить етапи, на яких:
генерують першу послідовність пілотних символів, основуючись на багатофазній послідовності;
одержують другу послідовність пілотних символів, основуючись на першій послідовності пілотних символів; і
генерують послідовність виводжуваних символів, основуючись на другій послідовності пілотних символів, при цьому послідовність виводжуваних символів містить циклічний префікс і придатна для передачі через канал зв'язку.
12. Спосіб за п. 11, який містить також етап, на якому застосовують пилкоподібний фазовий сигнал до другої послідовності пілотних символів і при цьому послідовність виводжуваних символів генерують, основуючись на другій послідовності пілотних символів, після застосування пилкоподібного фазового сигналу.
13. Спосіб за п. 11, який містить також етапи, на яких:
передають третю послідовність виводжуваних символів у часовій ділянці через канал зв'язку.
14. Пристрій для генерування пілот-сигналу в системі зв'язку, який містить:
засіб для генерування першої послідовності пілотних символів, основуючись на багатофазній послідовності; і
засіб для одержання другої послідовності пілотних символів, основуючись на першій послідовності пілотних символів; і
засіб для генерування послідовності виводжуваних символів, основуючись на другій послідовності пілотних символів, при цьому послідовність виводжуваних символів містить циклічний префікс і придатна для передачі через канал зв'язку.
15. Пристрій за п. 14, який містить також засіб для застосування пилкоподібного фазового сигналу до другої послідовності пілотних символів, і при цьому послідовність виводжуваних символів генерують, основуючись на другій послідовності пілотних символів, після застосування пилкоподібного фазового сигналу.
16. Пристрій за п. 14, який містить також засіб для передачі третьої послідовності виводжуваних символів у часовій ділянці через канал зв'язку.
17. Пристрій для генерування пілот-сигналу в системі зв'язку, який містить:
блок обробки, призначений для генерування першої послідовності пілотних символів, основуючись на багатофазній послідовності; і
модулятор, призначений для перетворення першої послідовності пілотних символів в частотну ділянку для одержання другої послідовності символів частотної ділянки, для формування третьої послідовності символів за допомогою відображення другої послідовності символів частотної ділянки на групу частотних піддіапазонів, які використовуються для передачі пілот-сигналу, і для перетворення третьої послідовності символів у часову ділянку для одержання четвертої послідовності виводжуваних символів для передачі через канал зв'язку.
18. Пристрій за п. 17, в якому модулятор призначений для додавання циклічного префікса до четвертої послідовності виводжуваних символів для одержання п'ятої послідовності виводжуваних символів, яка підходить для передачі у часовій ділянці через канал зв'язку.
19. Пристрій за п. 17, в якому багатофазна послідовність має сталу обвідну у часовій ділянці і рівномірну спектральну характеристику в частотній ділянці.
20. Пристрій за п. 17, в якому символи даних посилають у другій групі частотних піддіапазонів, яка містить більше частотних піддіапазонів, ніж группа частотних піддіапазонів, що використовуються для передачі пілот-сигналу.
21. Пристрій для генерування пілот-сигналу в системі зв'язку, який містить:
блок обробки, призначений для генерування послідовності пілотних символів, для формування послідовності символів даних і для мультиплексування з часовим розділенням послідовності символів даних і послідовності пілотних символів; і
модулятор, призначений для генерування щонайменше одного символу множинного доступу з частотним розділенням каналів з однією несучою (SC-FDMA), основуючись на мультиплексованих з часовим розділенням символах даних і пілотних символах.
22. Пристрій за п. 21, в якому блок обробки призначений для мультиплексування послідовності символів даних в першому періоді символу і
мультиплексування послідовності пілотних символів у другому періоді символу, і
в якому модулятор призначений для генерації першого символу SC-FDMA для послідовності символів даних в першому періоді символу і для генерації другого символу SC-FDMA для послідовності пілотних символів у другому періоді символу.
23. Пристрій за п. 21, в якому блок обробки призначений для мультиплексування послідовності символів даних і послідовності пілотних символів в різних періодах відліків періоду символу, і в якому модулятор призначений для генерації символу SC-FDMA для мультиплексованих пілот-сигналу і символів даних для періоду символу.
24. Пристрій для генерування пілот-сигналу в системі зв'язку, який містить:
засіб для генерування послідовності пілотних символів;
засіб для генерування послідовності символів даних;
засіб для мультиплексування з часовим розділенням послідовності символів даних і послідовності пілотних символів; і
засіб для генерування щонайменше одного символу множинного доступу з частотним розділенням каналів з однією несучою (SC-FDMA), основуючись на мультиплексованих з часовим розділенням символах даних і пілотних символах.
25. Пристрій за п. 24, в якому засіб для мультиплексування з часовим розділенням послідовності символів даних і послідовності пілотних символів містить засіб для мультиплексування послідовності символів даних в першому періоді символу, і
засіб для мультиплексування послідовності пілотних символів у другому періоді символу.
26. Пристрій за п. 24, в якому засіб для мультиплексування з часовим розділенням послідовності символів даних і послідовності пілотних символів містить засіб для мультиплексування послідовності символів даних і послідовності пілотних символів в різні періоди відліків періоду символу.
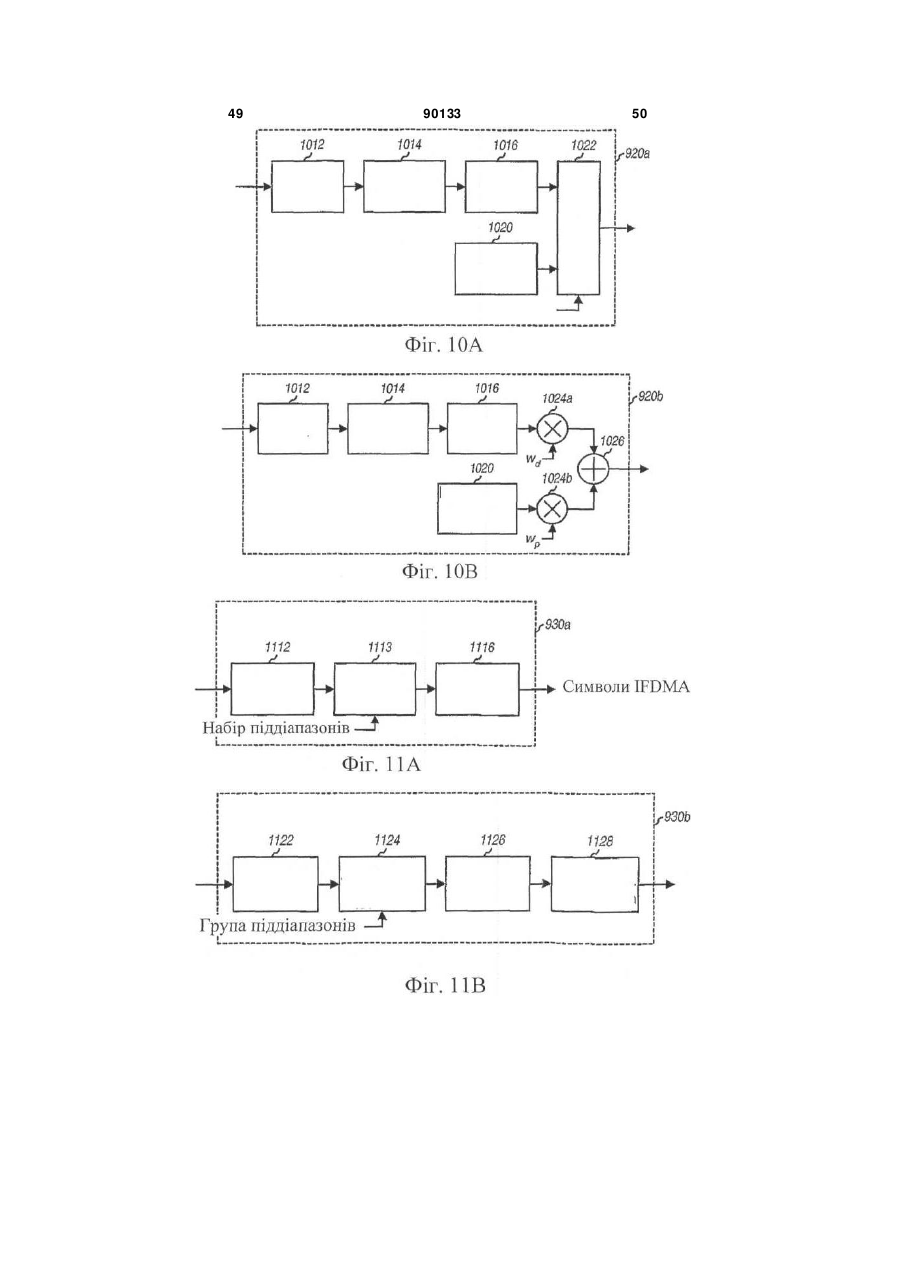
27. Пристрій для генерування пілот-сигналу в системі зв'язку, який містить:
блок обробки, призначений для генерування послідовності пілотних символів і формування послідовності символів даних; і
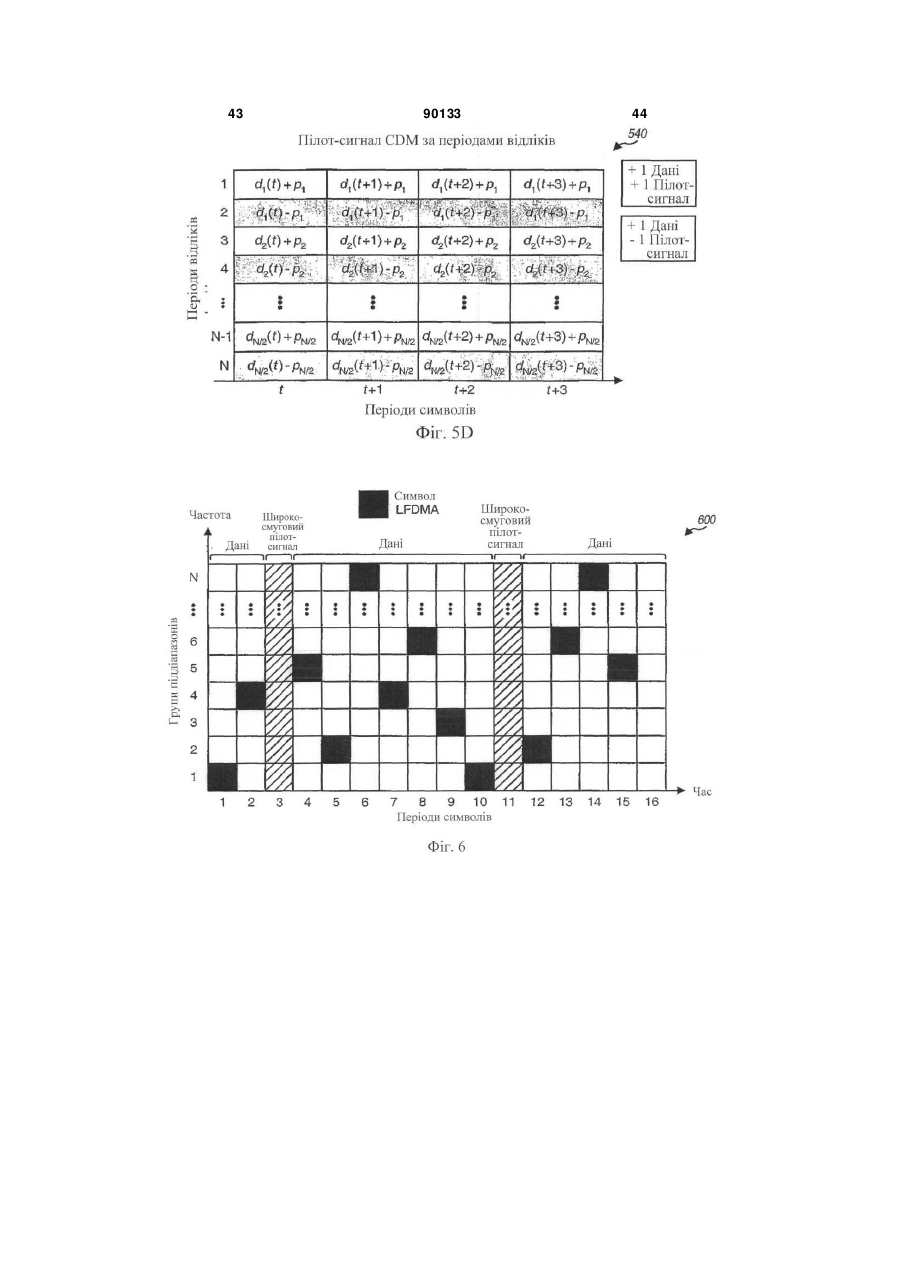
модулятор, призначений для генерування широкосмугового пілот-сигналу, основуючись на послідовності пілотних символів, для генерування щонайменше одного символу множинного доступу з частотним розділенням каналів з однією несучою (SC-FDMA), основуючись на послідовності символів даних, і для мультиплексування з часовим розділенням широкосмугового пілот-сигналу і щонайменше одного символу SC-FDMA.
28. Пристрій за п. 27, в якому блок обробки призначений для формування послідовності пілотних символів, основуючись на псевдовипадковій (ПВ) послідовності.
29. Пристрій за п. 27, в якому модулятор призначений для генерації щонайменше одного перемежовуваного FDMA (IFDMA) символу або щонайменше одного локалізованого FDMA (LFDMA) символу для послідовності символів даних.
30. Пристрій за п. 27, в якому широкосмуговий пілот-сигнал є псевдовипадковим відносно щонайменше одного іншого широкосмугового пілот-сигналу щонайменше від одного іншого передавача.
31. Пристрій за п. 27, в якому широкосмуговий пілот-сигнал вирівнюють за часом щонайменше з одним іншим широкосмуговим пілот-сигналом щонайменше від одного іншого передавача.
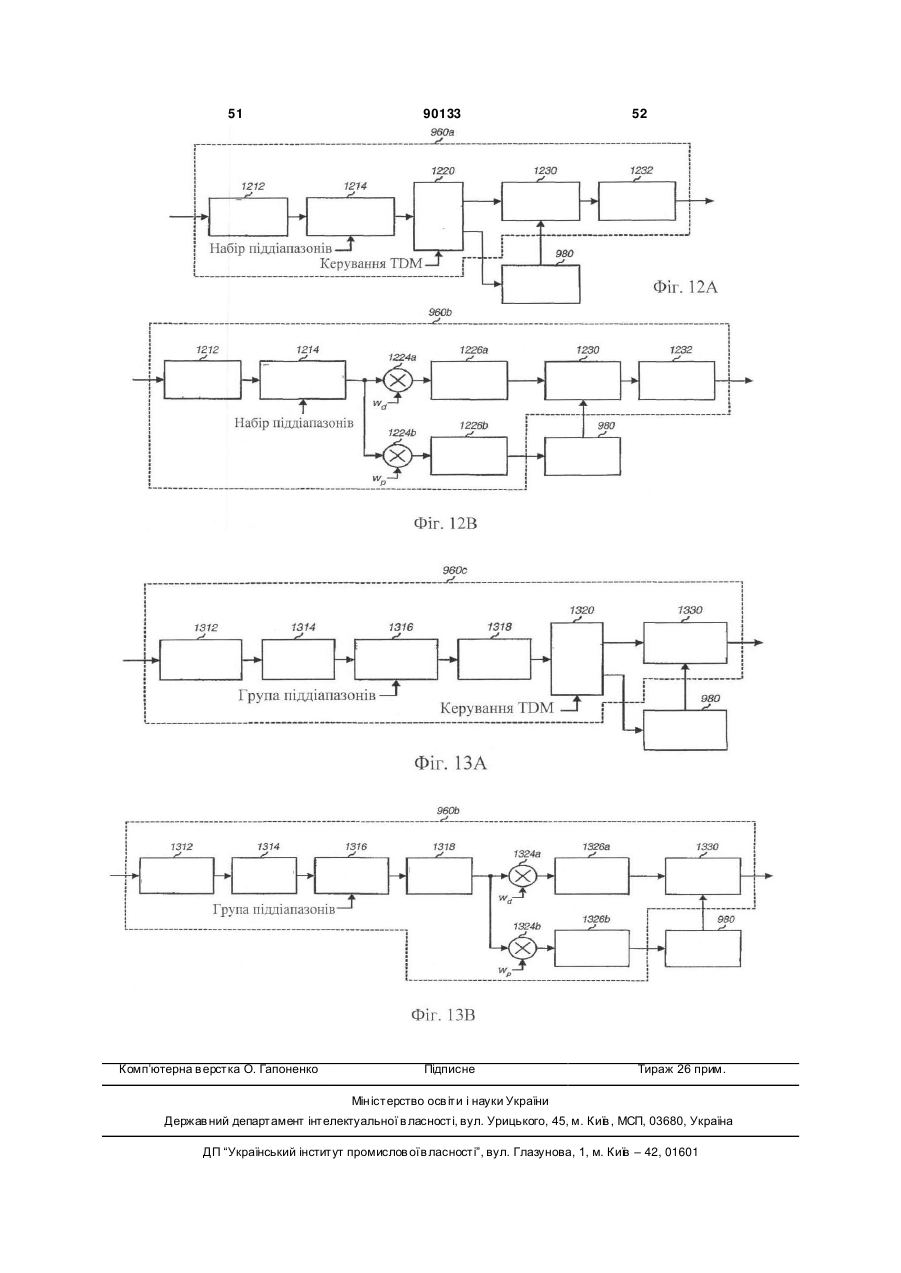
32. Пристрій для прийому пілот-сигналу в системі зв'язку, який містить:
демодулятор, призначений для прийому щонайменше одного символу множинного доступу з частотним розділенням каналів з однією несучою (SC-FDMA) через канал зв'язку і для обробки щонайменше одного символу SC-FDMA для одержання прийнятих пілотних символів у часовій ділянці; і
блок обробки, призначений для перетворення прийнятих пілотних символів для одержання оцінок пілот-сигналу частотної ділянки і для одержання оцінки частотної характеристики для каналу зв'язку, основуючись на значеннях пілот-сигналу частотної ділянки і використанні методики мінімальної середньоквадратичної помилки (MMSE) або методики найменших квадратів (LS).
33. Пристрій за п. 32, в якому блок обробки призначений для одержання оцінки імпульсної характеристики каналу зв'язку, основуючись на оцінці частотної характеристики.
34. Пристрій за п. 32, в якому блок обробки призначений для фільтрації оцінки частотної характеристики.
35. Пристрій за п. 33, в якому блок обробки призначений для фільтрації оцінки імпульсної характеристики каналу.
36. Пристрій за п. 32, в якому блок обробки призначений для одержання оцінки частотної характеристики для символів SC-FDMA, які послали щонайменше в двох наборах частотних піддіапазонів, для одержання оцінки імпульсної характеристики каналу, основуючись на оцінках частотної характеристики, і для фільтрації оцінки імпульсної характеристики каналу для одержання розширеної оцінки імпульсної характеристики каналу, що має більше сигналів, ніж кожна з оцінок імпульсної характеристики каналу.
37. Пристрій за п. 33, в якому блок обробки призначений для збереження обумовленої кількості сигналів в оцінці імпульсної характеристики каналу і для встановлення сигналів, що залишилися, в оцінці імпульсної характеристики каналу в нуль.
38. Пристрій за п. 37, в якому блок обробки призначений для вибору обумовленої кількості сигналів, основуючись на відношенні "сигнал до шуму та інтерференції" (SNR), або спектральної ефективності, для передачі даних через канал зв'язку.
39. Пристрій за п. 33, в якому блок обробки призначений для збереження в оцінці імпульсної характеристики каналу сигналів, що перевищують обумовлене порогове значення, і для встановлення інших сигналів в оцінці імпульсної характеристики каналу в нуль.
40. Пристрій за п. 33, в якому блок обробки призначений для збереження перших L сигналів в оцінці імпульсної характеристики каналу і встановлення інших сигналів в оцінці імпульсної характеристики каналу в нуль, де L - ціле число, яке дорівнює одному або більше.
41. Пристрій за п. 32, в якому демодулятор призначений для демультиплексування прийнятих символів щонайменше в одному символі SC-FDMA на прийняті символи даних і прийняті пілотні символи.
42. Пристрій за п. 32, в якому демодулятор призначений для обробки щонайменше одного символу SC-FDMA за допомогою ортогональної послідовності для пілот-сигналу для одержання прийнятих пілотних символів.
43. Пристрій за п. 32, який містить також еквалайзер, призначений для вирівнювання прийнятих символів даних, основуючись на оцінці частотної характеристики.
44. Пристрій для прийому пілот-сигналу в системі зв'язку, який містить:
засіб для обробки щонайменше одного символу множинного доступу з частотним розділенням каналів з однією несучою (SC-FDMA), прийнятого через канал зв'язку, для одержання прийнятих пілотних символів;
засіб для перетворення прийнятих пілотних символів для одержання значення пілот-сигналу частотної ділянки, і
засіб для одержання оцінки частотної характеристики для каналу зв'язку, основуючись на значеннях пілот-сигналу частотної ділянки і використовуючи методику мінімальної середньоквадратичної помилки (MMSE) або методику найменших квадратів (LS).
45. Пристрій за п. 44, який містить також засіб для одержання оцінки імпульсної характеристики каналу зв'язку, основуючись на оцінці частотної характеристики, і
засіб для встановлення в нуль щонайменше одного сигналу оцінки імпульсної характеристики каналу.
46. Пристрій за п. 44, який містить також засіб для фільтрації щонайменше двох оцінок частотної характеристики, одержаних щонайменше з двох символів SC-FDMA щонайменше для двох періодів символу.
47. Пристрій для прийому пілот-сигналу в системі зв'язку, який містить: демодулятор, призначений для прийому послідовності відліків, яка містить пілотний сигнал, сформований на основі послідовності пілотних символів, згенерованої за допомогою багатофазної послідовності, для видалення циклічного префіксу з послідовності відліків, і для обробки послідовності відліків після видалення циклічного префіксу для одержання прийнятих пілотних символів.
48. Пристрій для прийому пілот-сигналу в системі зв'язку, який містить:
демодулятор, призначений для прийому щонайменше одного символу множинного доступу з частотним розділенням каналів з однією несучою (SC-FDMA) через канал зв'язку і для демультиплексування з часовим розділенням прийнятих символів щонайменше в одному символі SC-FDMA на прийняті символи даних і прийняті пілотні символи; і
блок обробки, призначений для одержання оцінок каналу зв'язку, основуючись на прийнятих пілотних символах.
49. Пристрій для прийому пілот-сигналу в системі зв'язку, який містить:
демодулятор, призначений для прийому щонайменше одного символу множинного доступу з частотним розділенням каналів з однією несучою (SC-FDMA) через канал зв'язку і для обробки щонайменше одного символу SC-FDMA для одержання прийнятих пілотних символів; і
блок обробки, призначений для одержання оцінки каналу зв'язку, основуючись на прийнятих пілотних символах і використанні методики найменших квадратів (LS).
50. Пристрій для прийому пілот-сигналу в системі зв'язку, який містить:
демодулятор, призначений для прийому щонайменше одного символу множинного доступу з частотним розділенням каналів з однією несучою (SC-FDMA) через канал зв'язку і для обробки щонайменше одного символу SC-FDMA для одержання прийнятих пілотних символів у часовій ділянці; і
блок обробки, призначений для ідентифікації щонайменше одного сигналу імпульсної характеристики оцінок каналу зв'язку за допомогою порівняння прийнятих пілотних символів з переданими пілотними символами при різних зміщеннях у часі.
51. Пристрій за п. 50, в якому щонайменше один символ SC-FDMA містить пілотні символи і символи даних, мультиплексовані за періодами відліків, і в якому демодулятор призначений для демультиплексування прийнятих пілотних символів і прийнятих символів даних щонайменше в одному символі SC-FDMA.
52. Пристрій для прийому пілот-сигналу в системі зв'язку, який містить:
демодулятор, призначений для прийому щонайменше одного символу множинного доступу з частотним розділенням каналів з однією несучою (SC-FDMA) через канал зв'язку, для обробки щонайменше одного символу SC-FDMA для одержання прийнятих пілотних символів і прийнятих символів даних, і для
обробки прийнятих символів даних за допомогою першої оцінки каналу зв'язку для одержання оцінки символу даних; і
перший блок обробки, призначений для одержання першої оцінки каналу, основуючись на прийнятих пілотних символах, для оцінки інтерференції через прийняті символи даних, основуючись на першій оцінці каналу та оцінках символу даних, для одержання пілотних символів без інтерференції, основуючись на прийнятих пілотних символах та оцінці інтерференції, і для одержання другої оцінки каналу, основуючись на пілотних символах без інтерференції.
53. Пристрій за п. 52, який містить також другий блок обробки, призначений для обробки оцінок символу даних для одержання декодованих даних і для обробки декодованих даних для одержання повторно модульованих символів даних, і в якому перший блок обробки призначений для оцінки інтерференції, основуючись на повторно модульованих символах даних.
54. Пристрій за п. 52, в якому демодулятор і перший блок обробки призначені для одержання оцінок символів даних, для оцінки інтерференції для одержання пілотних символів без інтерференції і для одержання другої оцінки каналу протягом множини ітерацій.
55. Пристрій для прийому пілот-сигналу в системі зв'язку, який містить: демодулятор, призначений для прийому щонайменше одного символу множинного доступу з частотним розділенням каналів з однією несучою (SC-FDMA) через канал зв'язку і для обробки щонайменше одного символу SC-FDMA для одержання прийнятих пілотних символів і прийнятих символів даних; і
перший блок обробки, призначений для одержання першої оцінки каналу зв'язку, основуючись на прийнятих пілотних символах, для одержання другої оцінки каналу, основуючись на прийнятих символах даних, і для одержання третьої оцінки каналу, основуючись на першій і другій оцінках каналу.
56. Пристрій за п. 55, в якому демодулятор призначений для обробки прийнятих символів даних за допомогою першої оцінки каналу для одержання оцінки символу даних.
57. Пристрій за п. 56, в якому перший блок обробки призначений для одержання другої оцінки каналу, основуючись на прийнятих символах даних та оцінках символів даних.
58. Пристрій за п. 56, який містить також другий блок обробки, призначений для обробки оцінки символів даних для одержання декодованих даних і для обробки декодованих даних для одержання повторно модульованих символів даних, і в якому перший блок обробки призначений для одержання другої оцінки каналу, основуючись на прийнятих символах даних і повторно модульованих символах даних.
59. Пристрій за п. 55, в якому перший блок обробки призначений для одержання третьої оцінки каналу, основуючись на функції першої оцінки каналу, другої оцінки каналу і вказівки відносно упевненості в надійності оцінок символу даних.
Текст
1. Пристрій для генерування пілот-сигналу в системі зв'язку, який містить: блок обробки, призначений для генерування першої послідовності пілотних символів, основуючись на багатофазній послідовності; і модулятор, призначений для одержання другої послідовності пілотних символів, основуючись на першій послідовності пілотних символів, і генерування послідовності виводжуваних символів, основуючись на другій послідовності пілотних символів, при цьому послідовність виводжуваних символів містить циклічний префікс і придатна для передачі через канал зв'язку. 2. Пристрій за п. 1, в якому модулятор призначений для застосування пилкоподібного фазового сигналу до др угої послідовності пілотних символів і для генерування послідовності виводжуваних символів, основуючись на другій послідовності пілотних символів, після застосування пилкоподібного фазового сигналу. 3. Пристрій за п. 2, в якому модулятор також призначений для використання щонайменше двох різних кутів нахилу фази для пилкоподібного фазового сигналу щонайменше в двох різних періодах символу для передачі першої послідовності пілотних символів щонайменше в двох різних наборах частотних піддіапазонів. 2 (19) 1 3 90133 4 частотних піддіапазонів і в якому символи даних 18. Пристрій за п. 17, в якому модулятор признапосилають у др угому наборі частотних піддіапазочений для додавання циклічного префікса до четнів, який містить більше частотних піддіапазонів, вертої послідовності виводжуваних символів для ніж перший набір. одержання п'я тої послідовності виводжуваних си11. Спосіб генерування пілот-сигналу в системі мволів, яка підходить для передачі у часовій ділязв'язку, який містить етапи, на яких: нці через канал зв'язку. генерують першу послідовність пілотних символів, 19. Пристрій за п. 17, в якому багатофазна посліосновуючись на багатофазній послідовності; довність має сталу обвідну у часовій ділянці і ріводержують другу послідовність пілотних символів, номірну спектральну характеристику в частотній основуючись на першій послідовності пілотних ділянці. символів; і 20. Пристрій за п. 17, в якому символи даних п огенерують послідовність виводжуваних символів, силають у другій групі частотних піддіапазонів, яка основуючись на другій послідовності пілотних симістить більше частотних піддіапазонів, ніж группа мволів, при цьому послідовність виводжуваних частотних піддіапазонів, що використовуються для символів містить циклічний префікс і придатна для передачі пілот-сигналу. передачі через канал зв'язку. 21. Пристрій для генерування пілот-сигналу в сис12. Спосіб за п. 11, який містить також етап, на темі зв'язку, який містить: якому застосовують пилкоподібний фазовий сигблок обробки, призначений для генерування поснал до другої послідовності пілотних символів і лідовності пілотних символів, для формування при цьому послідовність виводжуваних символів послідовності символів даних і для мультиплексугенерують, основуючись на другій послідовності вання з часовим розділенням послідовності симпілотних символів, після застосування пилкоподібволів даних і послідовності пілотних символів; і ного фазового сигналу. модулятор, призначений для генерування щонай13. Спосіб за п. 11, який містить також етапи, на менше одного символу множинного доступу з часяких: тотним розділенням каналів з однією несучою (SCпередають третю послідовність виводжуваних сиFDMA), основуючись на мультиплексованих з чамволів у часовій ділянці через канал зв'язку. совим розділенням символах даних і пілотних си14. Пристрій для генерування пілот-сигналу в сисмволах. темі зв'язку, який містить: 22. Пристрій за п. 21, в якому блок обробки приззасіб для генерування першої послідовності пілотначений для мультиплексування послідовності них символів, основуючись на багатофазній послісимволів даних в першому періоді символу і довності; і мультиплексування послідовності пілотних симвозасіб для одержання другої послідовності пілотних лів у другому періоді символу, і символів, основуючись на першій послідовності в якому модулятор призначений для генерації пілотних символів; і першого символу SC-FDMA для послідовності сизасіб для генерування послідовності виводжувамволів даних в першому періоді символу і для гених символів, основуючись на другій послідовності нерації другого символу SC-FD MA для послідовпілотних символів, при цьому послідовність вивоності пілотних символів у другому періоді символу. джуваних символів містить циклічний префікс і 23. Пристрій за п. 21, в якому блокобробки призпридатна для передачі через канал зв'язку. начений для мультиплексування послідовності 15. Пристрій за п. 14, який містить також засіб для символів даних і послідовності пілотних символів в застосування пилкоподібного фазового сигналу до різних періодах відліків періоду символу, і в якому другої послідовності пілотних символів, і при цьомодулятор призначений для генерації символу му послідовність виводжуваних символів генеруSC-FDMA для мультиплексованих пілот-сигналу і ють, основуючись на другій послідовності пілотних символів даних для періоду символу. символів, після застосування пилкоподібного фа24. Пристрій для генерування пілот-сигналу в сисзового сигналу. темі зв'язку, який містить: 16. Пристрій за п. 14, який містить також засіб для засіб для генерування послідовності пілотних симпередачі третьої послідовності виводжуваних символів; волів у часовій ділянці через канал зв'язку. засіб для генерування послідовності символів да17. Пристрій для генерування пілот-сигналу в сисних; темі зв'язку, який містить: засіб для мультиплексування з часовим розділенблок обробки, призначений для генерування перням послідовності символів даних і послідовності шої послідовності пілотних символів, основуючись пілотних символів; і на багатофазній послідовності; і засіб для генерування щонайменше одного симмодулятор, призначений для перетворення першої волу множинного доступу з частотним розділенпослідовності пілотних символів в частотну ділянням каналів з однією несучою (SC-FDMA), основуку для одержання другої послідовності символів ючись на мультиплексованих з часовим частотної ділянки, для формування третьої послірозділенням символах даних і пілотних символах. довності символів за допомогою відображення 25. Пристрій за п. 24, в якому засіб для мультипдругої послідовності символів частотної ділянки на лексування з часовим розділенням послідовності груп у частотни х піддіапазонів, які використовуютьсимволів даних і послідовності пілотних символів ся для передачі пілот-сигналу, і для перетворення містить засіб для мультиплексування послідовностретьої послідовності символів у часову ділянку ті символів даних в першому періоді символу, і для одержання четвертої послідовності виводж узасіб для мультиплексування послідовності пілотваних символів для передачі через канал зв'язк у. них символів у др угому періоді символу. 5 90133 6 26. Пристрій за п. 24, в якому засіб для мультипристики для символів SC-FDMA, які послали щолексування з часовим розділенням послідовності найменше в двох наборах частотних піддіапазонів, символів даних і послідовності пілотних символів для одержання оцінки імпульсної характеристики містить засіб для мультиплексування послідовносканалу, основуючись на оцінках частотної характі символів даних і послідовності пілотних симвотеристики, і для фільтрації оцінки імпульсної харалів в різні періоди відліків періоду символу. ктеристики каналу для одержання розширеної оці27. Пристрій для генерування пілот-сигналу в сиснки імпульсної характеристики каналу, що має темі зв'язку, який містить: більше сигналів, ніж кожна з оцінок імпульсної хаблок обробки, призначений для генерування посрактеристики каналу. лідовності пілотних символів і формування послі37. Пристрій за п. 33, в якому блок обробки приздовності символів даних; і начений для збереження обумовленої кількості модулятор, призначений для генерування широкосигналів в оцінці імпульсної характеристики каналу смугового пілот-сигналу, основуючись на послідоі для встановлення сигналів, що залишилися, в вності пілотних символів, для генерування щонайоцінці імпульсної характеристики каналу в н уль. менше одного символу множинного доступу з 38. Пристрій за п. 37, в якому блок обробки призчастотним розділенням каналів з однією несучою начений для вибору обумовленої кількості сигна(SC-FDMA), основуючись на послідовності символів, основуючись на відношенні "сигнал до шуму лів даних, і для мультиплексування з часовим розта інтерференції" (SNR), або спектральної ефекділенням широкосмугового пілот-сигналу і щонайтивності, для передачі даних через канал зв'язку. менше одного символу SC-FDMA. 39. Пристрій за п. 33, в якому блок обробки приз28. Пристрій за п. 27, в якому блок обробки призначений для збереження в оцінці імпульсної хараначений для формування послідовності пілотних ктеристики каналу сигналів, що перевищують обусимволів, основуючись на псевдовипадковій (ПВ) мовлене порогове значення, і для встановлення послідовності. інших сигналів в оцінці імпульсної характеристики 29. Пристрій за п. 27, в якому модулятор признаканалу в н уль. чений для генерації щонайменше одного переме40. Пристрій за п. 33, в якому блок обробки призжовуваного FDMA (IFD MA) символу або щонайменачений для збереження перших L сигналів в оцінше одного локалізованого FDMA (LFDMA) нці імпульсної характеристики каналу і встановсимволу для послідовності символів даних. лення інших сигналів в оцінці імпульсної 30. Пристрій за п. 27, в якому широкосмуговий характеристики каналу в нуль, де L - ціле число, пілот-сигнал є псевдовипадковим відносно щояке дорівнює одному або більше. найменше одного іншого широкосмугового пілот41. Пристрій за п. 32, в якому демодулятор призсигналу щонайменше від одного іншого передаваначений для демультиплексування прийнятих сича. мволів щонайменше в одному символі SC-FDMA 31. Пристрій за п. 27, в якому широкосмуговий на прийняті символи даних і прийняті пілотні симпілот-сигнал вирівнюють за часом щонайменше з воли. одним іншим широкосмуговим пілот-сигналом що42. Пристрій за п. 32, в якому демодулятор признайменше від одного іншого передавача. начений для обробки щонайменше одного симво32. Пристрій для прийому пілот-сигналу в системі лу SC-FD MA за допомогою ортогональної послідозв'язку, який містить: вності для пілот-сигналу для одержання прийнятих демодулятор, призначений для прийому щонайпілотних символів. менше одного символу множинного доступу з час43. Пристрій за п. 32, який містить також еквалайтотним розділенням каналів з однією несучою (SCзер, призначений для вирівнювання прийнятих FDMA) через канал зв'язку і для обробки щонайсимволів даних, основуючись на оцінці частотної менше одного символу SC-FDMA для одержання характеристики. прийнятих пілотних символів у часовій ділянці; і 44. Пристрій для прийому пілот-сигналу в системі блок обробки, призначений для перетворення зв'язку, який містить: прийнятих пілотних символів для одержання оцізасіб для обробки щонайменше одного символу нок пілот-сигналу частотної ділянки і для одермножинного доступу з частотним розділенням кажання оцінки частотної характеристики для каналу налів з однією несучою (SC-FDMA), прийнятого зв'язку, основуючись на значеннях пілот-сигналу через канал зв'язку, для одержання прийнятих частотної ділянки і використанні методики мінімапілотних символів; льної середньоквадратичної помилки (MMSE) або засіб для перетворення прийнятих пілотних симметодики найменших квадратів (LS). волів для одержання значення пілот-сигналу час33. Пристрій за п. 32, в якому блок обробки призтотної ділянки, і начений для одержання оцінки імпульсної харакзасіб для одержання оцінки частотної характеристеристики каналу зв'язку, основуючись на оцінці тики для каналу зв'язку, основуючись на значеннях частотної характеристики. пілот-сигналу частотної ділянки і використовуючи 34. Пристрій за п. 32, в якому блок обробки призметодику мінімальної середньоквадратичної поначений для фільтрації оцінки частотної характемилки (MMSE) або методику найменших квадратів ристики. (LS). 35. Пристрій за п. 33, в якому блок обробки приз45. Пристрій за п. 44, який містить також засіб для начений для фільтрації оцінки імпульсної характеодержання оцінки імпульсної характеристики каристики каналу. налу зв'язку, основуючись на оцінці частотної ха36. Пристрій за п. 32, в якому блок обробки призрактеристики, і начений для одержання оцінки частотної характе 7 90133 8 засіб для встановлення в нуль щонайменше однототним розділенням каналів з однією несучою (SCго сигналу оцінки імпульсної характеристики канаFDMA) через канал зв'язку, для обробки щонаймелу. нше одного символу SC-FDMA для одержання 46. Пристрій за п. 44, який містить також засіб для прийнятих пілотних символів і прийнятих символів фільтрації щонайменше двох оцінок частотної хаданих, і для рактеристики, одержаних щонайменше з двох сиобробки прийнятих символів даних за допомогою мволів SC-FDMA щонайменше для двох періодів першої оцінки каналу зв'язку для одержання оцінки символу. символу даних; і 47. Пристрій для прийому пілот-сигналу в системі перший блок обробки, призначений для одержанзв'язку, який містить: демодулятор, призначений ня першої оцінки каналу, основуючись на прийнядля прийому послідовності відліків, яка містить тих пілотних символах, для оцінки інтерференції пілотний сигнал, сформований на основі послідовчерез прийняті символи даних, основуючись на ності пілотних символів, згенерованої за допомопершій оцінці каналу та оцінках символу даних, гою багатофазної послідовності, для видалення для одержання пілотних символів без інтерференциклічного префіксу з послідовності відліків, і для ції, основуючись на прийнятих пілотних символах обробки послідовності відліків після видалення та оцінці інтерференції, і для одержання другої циклічного префіксу для одержання прийнятих оцінки каналу, основуючись на пілотних символах пілотних символів. без інтерференції. 48. Пристрій для прийому пілот-сигналу в системі 53. Пристрій за п. 52, який містить також другий зв'язку, який містить: блок обробки, призначений для обробки оцінок демодулятор, призначений для прийому щонайсимволу даних для одержання декодованих даних менше одного символу множинного доступу з часі для обробки декодованих даних для одержання тотним розділенням каналів з однією несучою (SCповторно модульованих символів даних, і в якому FDMA) через канал зв'язку і для демультиплексуперший блок обробки призначений для оцінки інвання з часовим розділенням прийнятих символів терференції, основуючись на повторно модуль ощонайменше в одному символі SC-FDMA на приваних символах даних. йняті символи даних і прийняті пілотні символи; і 54. Пристрій за п. 52, в якому демодулятор і перблок обробки, призначений для одержання оцінок ший блок обробки призначені для одержання оціканалу зв'язку, основуючись на прийнятих пілотних нок символів даних, для оцінки інтерференції для символах. одержання пілотних символів без інтерференції і 49. Пристрій для прийому пілот-сигналу в системі для одержання другої оцінки каналу протягом зв'язку, який містить: множини ітерацій. демодулятор, призначений для прийому щонай55. Пристрій для прийому пілот-сигналу в системі менше одного символу множинного доступу з часзв'язку, який містить: демодулятор, призначений тотним розділенням каналів з однією несучою (SCдля прийому щонайменше одного символу мноFDMA) через канал зв'язку і для обробки щонайжинного доступу з частотним розділенням каналів менше одного символу SC-FDMA для одержання з однією несучою (SC-FDMA) через канал зв'язку і прийнятих пілотних символів; і для обробки щонайменше одного символу SCблок обробки, призначений для одержання оцінки FDMA для одержання прийнятих пілотних симвоканалу зв'язку, основуючись на прийнятих пілотних лів і прийнятих символів даних; і символах і використанні методики найменших перший блок обробки, призначений для одержанквадратів (LS). ня першої оцінки каналу зв'язку, основуючись на 50. Пристрій для прийому пілот-сигналу в системі прийнятих пілотних символах, для одержання друзв'язку, який містить: гої оцінки каналу, основуючись на прийнятих симдемодулятор, призначений для прийому щонайволах даних, і для одержання третьої оцінки канаменше одного символу множинного доступу з часлу, основуючись на першій і другій оцінках каналу. тотним розділенням каналів з однією несучою (SC56. Пристрій за п. 55, в якому демодулятор призFDMA) через канал зв'язку і для обробки щонайначений для обробки прийнятих символів даних за менше одного символу SC-FDMA для одержання допомогою першої оцінки каналу для одержання прийнятих пілотних символів у часовій ділянці; і оцінки символу даних. блок обробки, призначений для ідентифікації що57. Пристрій за п. 56, в якому перший блок обробнайменше одного сигналу імпульсної характериски призначений для одержання другої оцінки канатики оцінок каналу зв'язку за допомогою порівнянлу, основуючись на прийнятих символах даних та ня прийнятих пілотних символів з переданими оцінках символів даних. пілотними символами при різних зміщеннях у часі. 58. Пристрій за п. 56, який містить також другий 51. Пристрій за п. 50, в якому щонайменше один блок обробки, призначений для обробки оцінки символ SC-FDMA містить пілотні символи і симвосимволів даних для одержання декодованих даних ли даних, мультиплексовані за періодами відліків, і і для обробки декодованих даних для одержання в якому демодулятор призначений для демультиповторно модульованих символів даних, і в якому плексування прийнятих пілотних символів і прийнперший блок обробки призначений для одержання ятих символів даних щонайменше в одному симдругої оцінки каналу, основуючись на прийнятих волі SC-FDMA. символах даних і повторно модульованих симво52. Пристрій для прийому пілот-сигналу в системі лах даних. зв'язку, який містить: 59. Пристрій за п. 55, в якому перший блок обробдемодулятор, призначений для прийому щонайки призначений для одержання третьої оцінки каменше одного символу множинного доступу з часналу, основуючись на функції першої оцінки кана 9 90133 10 лу, другої оцінки каналу і вказівки відносно упевненості в надійності оцінок символу даних. Вимога пріоритету за розділом 35 §119 Зводу законів США За даною заявкою на патент заявляється пріоритет за датою подачі попередньої заявки на патент №60/659526, озаглавленої «Estimation for Pilot Design and Channel Interleaved Frequency Division Multiple Access Communication», зареєстрованої 7 березня 2005p., і право на яку передане правонаступнику, яка спеціально наведена тут як посилання. Даний винахід стосується в загальному випадку зв'язку, а більш конкретно - передачі пілотсигналу та оцінки каналу для системи зв'язку. Мультиплексування з ортогональним частотним розділенням каналів (OFDM) є методикою модуляції з декількома несучими, яка ділить весь діапазон частот системи на множину (K) ортогональних піддіапазонів. Ці піддіапазони також називають тонами, піднесучими та елементами розрізнення за частотою. За допомогою OFDM кожний піддіапазон зв'язують з відповідною піднесучою, яку можна модулювати за допомогою даних. OFDM має визначені бажані характеристики, такі як висока спектральна ефективність і стійкість проти ефектів багатопроменевого поширення. Однак, головним недоліком OFDM є високе відношення пікової потужності до середньої потужності (PAPR), що означає, що відношення пікової потужності до середньої потужності сигналу OFDM може бути високим. Високе PAPR для сигналу OFDM є результатом можливого синфазного (або когерентного) складання всіх піднесучих, коли їх незалежно модулюють даними. Фактично, можна показати, що пікова потужність може бути до K разів більше, ніж середня потужність для OFDM. Високе PAPR для сигналу OFDM небажане і може погіршувати якість роботи. Наприклад, великі піки в сигналі OFDM можуть призводити до роботи підсилювача потужності в дуже нелінійній ділянці, або можливе обрізання, що потім спричиняє спотворення взаємної модуляції та інші спотворення, які можуть погіршува ти якість сигналу. Погіршення якості сигналу може несприятливо впливати на ефективність оцінки каналу, виявлення даних то що. Тому в попередньому рівні техніки існує потреба в методиках, які можуть зменшувати шкідливий вплив високого PAPR при модуляції з дек ількома несучими. У даному описі розкриті методики передачі п ілот-сигналу, за допомогою яких можна уникнути високого PAPR, і методики оцінки каналу. Пілотсигнал можна генерувати, основуючись на багатофазній послідовності і використовуючи множинний доступ з частотним розділенням каналів на одній несучій (SC-FDMA). Багато фазна послідовність є послідовністю, яка має хороші часові характеристики (наприклад, сталу обвідну у часовій ділянці) і хороші спектральні характеристики (наприклад, рівномірний частотний спектр). SC-FDMA включає в себе (1) FDMA (IFD MA), що перемежо вується, в якому дані і/або пілот-сигнал передають в піддіапазонах, які рівномірно розподілені по всіх K піддіапазонах, і (2) локалізований FDMA (LFDMA), в якому дані і/або пілот-сигнал передають звичайно в суміжних піддіапазонах серед всіх K піддіапазонів. IFDMA також називають розподіленим FDMA, a LFDMA також називають вузькосмуговим FDMA. У варіанті здійснення для передачі пілотсигналу з використанням IFDMA першу послідовність пілотних символів формують, основуючись на багатофазній послідовності, і повторюють багато разів для одержання другої послідовності пілотних символів. Пилкоподібний фазовий сигнал можна застосовувати до другої послідовності пілотних символів для одержання третьої послідовності символів, які виводяться. Циклічний префікс додають до третьої послідовності символів, які виводяться, для формування символу IFD MA, який передають у часовій ділянці через канал зв'язку. Пілотні символи можна мультиплексувати з символами даних, використовуючи мультиплексування з часовим розділенням каналів (TDM), мультиплексування з кодовим розділенням каналів (CDM) і/або деяку іншу схему мультиплексування. У варіанті здійснення для передачі пілотсигналу з використанням LFDMA першу послідовність пілотних символів формують, основуючись на багатофазній послідовності, і перетворюють в частотну ділянку для одержання другої послідовності символів частотної ділянки. Третю послідовність символів формують за допомогою відображення другої послідовності символів частотної ділянки на групу піддіапазонів, що використовуються для передачі пілот-сигналу, і відображення нульових символів на інші піддіапазони. Третю послідовність символів перетворюють у часову ділянку для одержання четвертої послідовності символів, які виводяться. До четвертої послідовності символів, які виводяться, додають циклічний префікс для формування символу LFD MA, який передають у часовій ділянці через канал зв'язку. В одному з варіантів здійснення для оцінки к аналу щонайменше один символ SC-FDMA приймають через канал зв'язку та обробляють (наприклад, демультиплексують для пілот-сигналу TDM або об'єднують канали для пілот-сигналу CDM) для одержання прийнятих пілотних символів. Символ SC-FDMA може бути символом IFDMA або символом LFDMA. Оцінку каналу одержують, основуючись на прийнятих пілотних символах і використанні методики мінімальної середньоквадратичної помилки (MMSE), методики найменших квадратів (LS) або на деякій іншій методиці оцінки каналу. Фільтрацію, порівняння з пороговим значенням, зрізання і/або вибір сигналу можна виконувати для одержання поліпшеної оцінки каналу. Оцінку каналу можна також поліпшувати за допомогою виконання ітераційної оцінки каналу або оцінки каналу за допомогою даних. 11 90133 12 Різні аспекти і варіанти здійснення винаходу Фіг.1 показує зразкову структуру 100 піддіапаописані більш детально нижче. зонів, яка може використовуватися для системи Особливості та суть даного винаходу стануть зв'язку. Система має повний діапазон частот BW більш очевидними з сформульованого нижче доМГц, який розділений на K ортогональних піддіакладного опису при розгляді його разом з кресленпазонів, яким привласнюють індекси з 1 по K. нями, на яких однакові позиційні позначення співПроміжок між суміжними піддіапазонами дорівнює падають відповідним чином по всьому тексту. BW/K МГц. У системі, що має визначену форму Фіг.1 показує структуру переміжних піддіапаспектра, деякі піддіапазони на обох кінцях діапазонів для системи зв'язку. зону частот системи не використовуються для пеФіг.2 показує генерацію символу IFDMA для редачі даних/пілот-сигналу і служать захисними одного набору з N піддіапазонів. піддіапазонами для надання можливості системі Фіг.3 показує структур у вузькосмугових піддіавідповідати вимогам спектральної маски. Альтерпазонів. нативно, K піддіапазонів можна визначати в приФіг.4 показує генерацію символу LFDMA для датній для використання частини діапазону частот однієї групи з N піддіапазонів. системи. Для простоти подальший опис передбаФіг.5А та 5В показують дві схеми пілот-сигналу чає, що всі K піддіапазонів можуть використовуваTDM, коли пілот-сигнали і дані мультиплексують за тися для передачі даних/пілот-сигналу. періодами символу і періодами відліків, відповідно. Для структури 100 піддіапазонів всі K піддіапаФіг.5С та 5D показують дві схеми пілотзонів компонують в S непересічних наборів піддіасигналу CDM, коли пілот-сигнали і дані об'єднують пазонів, які також називають «перемежовуванняза періодами символу і періодами відліків, відповіми». S наборів відділені один від одного, або не дно. перекриваються один з одним, так як кожний з K Фіг.6 показує широкосмугові пілот-сигнали, які піддіапазонів належить тільки одному набору. Комультиплексують з часовим розділенням каналів з жний набір містить N піддіапазонів, які рівномірно даними. розподілені по всіх K піддіапазонах так, що посліФіг.7А показує процес генерації пілотного симдовні піддіапазони в наборі відділені один від одволу IFD MA. ного S піддіапазонами, де K=S·N. Таким чином Фіг.7В показує процес генерації пілотного симнабір u містить піддіапазони u, S+u, 2S+u,..., (Nволу LFD MA. 1)·S+u, де u - індекс набору та u {1,..., S}. Індекс u Фіг.8 показує процес виконання оцінки каналу. також є зміщенням піддіапазону, яке вказує перФіг.9 показує структурн у схему передавача і ший піддіапазон в наборі. N піддіапазонів в кожноприймача. му наборі чергуються з N піддіапазонами в кожноФіг.10А та 10В показують блоки обробки даних му з інших S-1 наборів. (ПД), що передаються, і пілот-сигналу для схеми Фіг.1 показує визначену структур у піддіапазопілот-сигналу TDM і схеми пілот-сигналу CDM, нів. У загальному випадку структура піддіапазонів відповідно. може включати в себе будь-яку кількість наборів Фіг.11А та 11В показують модулятори IFDMA піддіапазонів, і кожний набір може включати в сета LFDMA, відповідно. бе будь-яку кількість піддіапазонів. Набори можуть Фіг.12А та 12В показують демодулятори включати в себе однакову або відмінну кількість IFDMA для пілот-сигналів TDM та CDM, відповідпіддіапазонів. Наприклад, деякі набори можуть но. включати в себе N піддіапазонів, в той час як інші Фіг.13А та 13В показують демодулятори набори можуть включати в себе 2N, 4N або деяку LFDMA для пілот-сигналів TDM та CDM, відповідіншу кількість піддіапазонів. Піддіапазони в кожноно. му наборі рівномірно розподілені (тобто рівномірно Слово «зразковий» в даному описі означає розташовані) по всіх K піддіапазонах для досяг«такий, що служить прикладом, варіантом або нення описаних нижче переваг. Для простоти п оілюстрацією». Будь-який варіант здійснення або дальший опис передбачає використання структури розробка, описані в даному описі як «зразковий», 100 піддіапазонів, показаної на Фіг.1. не обов'язково повинні розглядатися як кращий S наборів піддіапазонів можна розглядати як S або переважний в порівнянні з іншими варіантами каналів, які можна використовувати для передачі здійснення або розробками. даних і пілот-сигналу. Наприклад, кожному корисОписані методики передачі пілот-сигналу та тувачеві можна призначати один набір піддіапазооцінки каналу можуть використовуватися для різнів, і дані і пілот-сигнал для кожного користувача них систем зв'язку, які використовують модуляцію можна посилати в призначеному наборі піддіапаз декількома несучими або виконують мультиплекзонів. S користувачів можуть одночасно передавасування з частотним розділенням каналів. Наприти дані/пілот-сигнал в S наборах піддіапазонів чеклад, ці методики можуть використовуватися для рез зворотний канал зв'язку до базової станції. системи множинного доступу з частотним роздіБазова станція може також одночасно передавати ленням каналів (FDMA), системи множинного досдані/пілот-сигнал в S наборах піддіапазонів через тупу з ортогональним частотним розділенням капрямий канал зв'язку S користувачам. Для кожного налів (OFDMA), системи SC-FDMA, системи каналу зв'язку до N символів модуляції можна поIFDMA, системи LFDMA, системи на основі OFDM силати в кожному періоді символу (за часом або тощо. Ці методики можуть також використовуватиза частотою) в N піддіапазонах в кожному наборі, ся для прямого каналу зв'язку (або низхідного кане викликаючи інтерференції з іншими наборами налу зв'язку) і зворотного каналу зв'язку (або випіддіапазонів. Символ модуляції - комплексне чиссхідного каналу зв'язку). ло для точки в сукупності (сузір'ї) сигналу (напри 13 90133 14 клад, для M-PSK (М-ної фазової маніпуляції), Mциклічним префіксом або інтервалом захисту, і С QAM (М-ної квадратурної амплітудної модуляції) довжина циклічного префікса. Циклічний префікс тощо). використовується для боротьби з міжсимвольною При OFDM символи модуляції передають в інтерференцією (ISI, МСІ), спричиненою вибіркочастотній ділянці. Для кожного набору піддіапазовим завмиранням частот, що є частотною харакнів N символів модуляції можна передавати в N теристикою, яка змінюється за діапазоном частот піддіапазонах в кожному періоді символу. У подасистеми. K+С символів, які виводяться, в символі льшому описі період символу є тривалістю часу IFDMA передають в K+С періодах відліків, один одного символу OFDM, одного символу IFD MA або символ, що виводиться, в кожному періоді відліків. одного символу LFDMA. Один символ модуляції Періодом символу для IFDMA є тривалість одного відображають на кожний з N піддіапазонів, що висимволу IFDMA і він дорівнює K+С періодів відлікористовуються для передачі, і нульовий символ ків. Період відліків також часто називають періо(який є значенням нульового сигналу) відображадом елементарного сигналу. ють на кожний з невживаних K-N піддіапазонів. K Оскільки символ IFDMA є періодичним у часосимволів модуляції і нульових символів перетвовій ділянці (за винятком пилкоподібного фазового рюють з частотної ділянки у часову ділянку, вик осигналу), символ IFDMA займає набір з N розтануючи K-точкове обернене швидке перетворення шованих на однаковій відстані піддіапазонів, почиФур'є (ОШПФ) для K символів модуляції і нульових наючи з піддіапазону u. Користувачі з різними змісимволів для одержання K відліків часової ділянки. щеннями піддіапазонів займають різні набори Відліки часової ділянки можуть мати високе PAPR. піддіапазонів, які ортогональні один одному, подіФіг.2 показує генерацію символу IFDMA для бно до OFDMA. одного набору з N піддіапазонів. Вихідна послідоФіг.3 показує зразкову структур у 300 вузьк освність з N символів модуляції, яку будуть передамугових піддіапазонів, яка може використовувативати в одному періоді символу в N піддіапазонах в ся для системи зв'язку. Для стр уктури 300 піддіанаборі u, позначена як {d 1, d2, d3,..., d N} (блок 210). пазонів K піддіапазонів компонують в S Вихідну послідовність з N символів модуляції понепересічних груп. Кожна група містить N піддіапавторюють S разів для одержання розширеної п осзонів, які є суміжними один з одним. У загальному лідовності з K символів модуляції (блок 212). N випадку N>1, S>1 і K=S·N, де N та S для структури символів модуляції посилають у часовій ділянці і 300 вузькосмугови х піддіапазонів можуть бути тивсі разом займають N піддіапазонів в частотній ми ж самими або відрізнятися від N та S для струділянці. S піків вихідної послідовності приводять ктури 100 переміжних піддіапазонів на Фіг.1. Група до N зайнятих піддіапазонів, що розділяються S ν містить піддіапазони (ν-1)·Ν+1, (ν-1)·Ν+2,..., ν·Ν, піддіапазонами, причому S-1 піддіапазонів нульоде ν - індекс групи і v {1,..., S}. У загальному випавої потужності відділяють суміжні зайняті піддіападку стр уктура піддіапазонів мож е включати в себе зони. Розширена послідовність має гребінчастий будь-яку кількість груп, кожна група може містити частотний спектр, який займає набір 1 піддіапазобудь-яку кількість піддіапазонів, і групи можуть нів на Фіг.1. містити однакову або відмінну кількість піддіапазоРозширену послідовність помножують на пилнів. коподібний фазовий сигнал для одержання посліФіг.4 показує генерацію символу LFDMA для довності символів, які виводяться, з перетвореною однієї групи з N піддіапазонів. Вихідна послідовчастотою (блок 214). Кожний символ, що вивоність з N символів модуляції, які будуть передавадиться, в послідовності з перетвореною частотою ти в одному періоді символу в групі піддіапазонів, можна генерувати таким чином: позначена як {d1, d2, d3,..., d N} (блок 410). Вихідну послідовність з N символів модуляції перетворюxn=d n·e -j2 (n-1)(u-1)/K , для n=1,..., K Рівн. (1) ють в частотну ділянку за допомогою N-точкового швидкого перетворення Фур'є (ШПФ) для одерде d n є n-ним символом модуляції в розширежання послідовності з N символів частотної ділянній послідовності і хn є n-ним символом, що вивоки (блок 412). N символів частотної ділянки відодиться, в послідовності з перетвореною частотою. бражають на N піддіапазонів, що використовуються для передачі, і K-N нульових Пилкоподібний фазовий сигнал e -j2 (n-1)(u-1)/K має символів відображають на K-N піддіапазонів, що фазовий нахил 2 (u-1)/Κ, який визначається перзалишилися, для генерації послідовності з K симшим піддіапазоном в наборі u. Елементи «n-1» та волів (блок 414). N піддіапазонів, що використову«u-1» в експоненті пилкоподібного фазового сигються для передачі, мають індекси з k+1 no k+N, налу з'являються для того, щоб індекси n та u п оде 1 k (K-N). Послідовність з K символів потім чиналися із '1' замість '0'. Множення на пилкоподіперетворюють у часову ділянку за допомогою Kбний фазовий сигнал у часовій ділянці перетворює гребінчастий частотний спектр розширеної посліточкового ОШПФ для одержання послідовності з K символів часової ділянки, що виводяться, (блок довності вгору за частотою так, щоб послідовність 416). Останні С символів, які виводяться, послідоз перетвореною частотою займала набір u піддіавності копіюють в початок послідовності для форпазонів в частотній ділянці. мування символу LFDMA, який містить K+С симЗ останніх символів послідовності, що виводяться, з перетвореною частотою копіюють до волів, які виводяться, (блок 418). Символ LFDMA генерують так, що він займає початку перетвореною частотою послідовності для груп у з N суміжних піддіапазонів, починаючи з підформування символу IFD MA, який містить K+С діапазону k+1. Користувачам можуть бути признасимволів, які виводяться, (блок 216). С скопійовачені різні групи піддіапазонів, що не перекриваних символів, які виводяться, часто називають 15 90133 16 ються, які ортогональні один одному, подібно до жах того ж самого символу SC-FDMA, Наприклад, OFDMA. Кожному користувачеві можуть бути присимволи даних можна посилати в періодах відліків значені різні групи піддіапазонів в різних періодах D 2, потім пілотні символи можна посилати в настусимволу для досягнення частотного рознесення. пних періодах відліків Р 2, потім символи даних Групи піддіапазонів для кожного користувача можпосилають в наступних періодах відліків D 2, тощо. на вибирати, наприклад, основуючись на зразку В загальному випадку D 2 1 та Р2 1. Для прикладу, стрибкоподібної перебудови частоти. показаного на Фіг.5В, D 2=1 та Р2=1. Послідовність SC-FDMA має визначені бажані характеристиз N даних і пілотних символів можна посилати в ки, такі як висока спектральна ефективність і стійодному наборі/групі піддіапазонів в кожному перікість проти ефектів багатопроменевого поширеноді символу і можна перетворювати в символ SCня, подібно до OFDMA. Крім того, SC-FD MA не має FDMA, як описано вище для Фіг.2 та 4. високого PAPR, оскільки символи модуляції посиСхема пілот-сигналу TDM може також мультилають у часовій ділянці. PAPR сигналу SC-FDMA плексувати пілот-сигнали і дані і за періодами сивизначають за допомогою точок сигналів в сукупмволу, і періодами відліків. Наприклад, дані і пілоності сигналів, вибраній для використання (напритні символи можна посилати в декількох періодах клад, М-PSK, M-QAM тощо). Однак символи модусимволу, тільки символи даних можна посилати в ляції часової ділянки в SC-FDMA схильні до деяких інших періодах символу, і тільки пілотні міжсимвольної інтерференції через нерівномірну символи можна посилати у визначених періодах характеристику каналу зв'язку. Можна виконувати символу. вирівнювання прийнятих символів модуляції для Фіг.5С показує схему 530 пілот-сигналу CDM з пом'якшення шкідливого впливу міжсимвольної пілот-сигналами і даними, що об'єднуються за пеінтерференції. Вирівнювання вимагає досить точріодами символу. Для цього варіанту здійснення ної оцінки каналу зв'язку, яка може бути одержана, послідовність з N символів даних помножують на використовуючи описані методики. першу ортогональну послідовність з Μ елементарПередавач може передавати пілот-сигнал для них сигналів {w d} для одержання Μ послідовностей полегшення оцінки каналу приймачем. Пілотмасштабованих символів даних, де М>1. Кожну сигнал є символами, що передаються, які заздалепослідовність масштабованих символів даних гідь відомі і передавачу, і приймачу. У даній роботі одержують, помножуючи ви хідну послідовність використовується, що символ даних є символом символів даних на один елементарний сигнал ормодуляції для даних, і пілотний символ є симвотогональної послідовності {w d}. Точно так само лом модуляції для пілот-сигналу. Символи даних і послідовність з N пілотних символів помножують пілотні символи можуть бути одержані з тих самих на другу ортогональну послідовність з Μ елеменабо різних сукупностей сигналу. Пілот-сигнал можтарних сигналів {w p} для одержання Μ послідовнона передавати різними способами, як описано нистей масштабованих пілотних символів. Кожну жче. послідовність масштабованих символів даних поФіг.5А показує схему 500 пілот-сигналу TDM з тім складають з відповідною послідовністю масшпілот-сигналами і даними, що мультиплексуються табованих пілотних символів для одержання посза періодами символу. Наприклад, дані можна лідовності об'єднаних символів. Μ послідовностей посилати в періоди символу D 1, потім пілот-сигнал об'єднаних символів одержують, складаючи Μ можна посилати в наступні періоди символу Р 1, послідовностей масштабованих символів даних з потім дані можна посилати в наступні періоди симΜ послідовностями масштабованих пілотних символу D 1, то що. В загальному випадку D 1 1 та Р1 1. волів. Кожну послідовність об'єднаних символів Для прикладу, показаного на Фіг.5А, D 1>1 та Р1=1. перетворюють в символ SC-FDMA. Послідовність з N символів даних можна посилати Ортогональні послідовності можуть бути посв одному наборі/групі піддіапазонів в кожному пелідовностями Уолша, послідовностями OVSF (орріоді символу, що використовується для передачі тогональних кодів змінної довжини) тощо. Для даних. Послідовність з N пілотних символів можна прикладу, показаного на Фіг.5С, М=2, перша ортопосилати в одному наборі/групі піддіапазонів в гональна послідовність {w d}={+1 +1}, і друга ортокожному періоді символу, що використовується гональна послідовність {w d}={+1 -1}. N символів для передачі пілот-сигналу. Для кожного періоду даних помножують на +1 для періоду символу t і символу послідовність з N символів даних або також на +1 для періоду символу t+1. N пілотних пілотних символів може бути перетворена в симсимволів помножують на +1 для періоду символу t вол IFD MA або символ LFDMA, як описано вище і на -1 для періоду символу t+1. Для кожного перідля Фіг.2 та 4, відповідно. Символ SC-FDMA може оду символу N масштабованих символів даних бути символом IFDMA або символом LFDMA. Сискладають з N масштабованими пілотними симвомвол SC-FDMA, що містить тільки пілот-сигнал, лами для одержання N об'єднаних символів для називають пілотним символом SC-FDMA, який цього періоду символу. може бути пілотним символом IFDMA або пілотФіг.5D показує схему 540 пілот-сигналу CDM з ним символом LFDMA. Символ SC-FDMA, що міспілот-сигналами і даними, що об'єднуються за петить тільки дані, називають символом даних SCріодами відліків. Для цього варіанту здійснення FDMA, який може бути символом даних IFD MA або послідовність з N/M символів даних помножують символом даних LFDMA. на ортогональну послідовність з Μ елементарних Фіг.5В показує схему 510 пілот-сигналу TDM з сигналів {w d} для одержання послідовності з N пілот-сигналами і даними, що мультиплексуються масштабованих символів даних. Зокрема перший за періодами відліків. Для цього варіанту здійссимвол даних d 1(t) у вихідній послідовності помнонення даніі пілот-сигнал мультиплексують в межують на ортогональну послідовність {w d} для 17 90133 18 одержання перших Μ масштабованих символів Фіг.6 показує схему 600 широкосмугового піданих, наступний символ даних d 2(t) помножують лот-сигналу, який більш відповідає зворотному на ортогональну послідовність {w d} для одержання каналу зв'язку. Для цього варіанту здійснення кожнаступних Μ масштабованих символів даних, тоний користувач передає широкосмуговий пілотщо, і останній символ даних d N/M(t) у ви хідній поссигнал, який є пілот-сигналом, який посилають на лідовності помножують на ортогональну послідоввсіх або більшості з всіх K піддіапазонів, наприність {w d} для одержання останніх Μ клад, на всіх піддіапазонах, придатних для викомасштабованих символів даних. Точно так само ристання для передачі. Широкосмуговий пілотпослідовність з Ν/Μ пілотних символів помнож усигнал можна генерувати у часовій ділянці (наприють на ортогональну послідовність з Μ елементаклад, за допомогою псевдовипадкової (ПС) послірних сигналів {w p} для одержання послідовності з довності) або в частотній ділянці (наприклад, виN масштабованих пілотних символів. Послідовкористовуючи OFD M). Широкосмуговий пілотність з N масштабованих символів даних складасигнал для кожного користувача можна мультипють з послідовністю з N масштабованих пілотних лексувати з часовим розділенням каналів з пересимволів для одержання послідовності з N об'єддачею даних від цього користувача, які можна генаних символів, яку перетворюють в символ SCнерувати, використовуючи LFD MA (як показано на FDMA. Фіг.6) або IFDMA (не показано на Фіг.6). ШирокосДля прикладу, показаного на Фіг.5D, М=2, ормугові пілот-сигнали від всіх користувачів можна тогональною послідовністю для даних є {w d}={+1 передавати в тих самих періодах символу, за до+1}, і ортогональною послідовністю для пілотпомогою чого можна уникнути інтерференції між сигналу є {w d}={+1 -1}. Послідовність з N/2 симводаними і пілот-сигналом для оцінки каналу. Широлів даних помножують на ортогональну послідовкосмуговий пілот-сигнал від кожного користувача ність {+1 +1} для одержання послідовності з N маможна мультиплексувати з кодовим розділенням сштабованих символів даних. Точно так само (наприклад, псевдовипадковим) по відношенню до послідовність з N/2 пілотних символів помножують широкосмугових пілот-сигналів від інших користуна ортогональну послідовність {+1 -1} для одервачів. Цього можна досягнути за допомогою призжання послідовності з N масштабованих пілотних начення кожному користувачеві різних ПС послісимволів. Для кожного періоду символу N масштадовностей. Широкосмуговий пілот-сигнал для бованих символів даних складають з N масштабокожного користувача має низьке відношення пікованими пілотними символами для одержання N вої потужності до середньої потужності (PAPR) та об'єднаних символів для цього періоду символу. охоплює весь діапазон частот системи, що надає Пілот-сигнал CDM можна посилати в кожному можливість приймачу одержувати широкосмугову періоді символу, як показано на Фіг.5С та 5D. Піоцінку каналу для користувача. Для варіанту здійлот-сигнал CDM можна також посилати тільки у снення, показаного на Фіг.6, піддіапазони даних визначених періодах символу. У схемі пілотстрибкоподібно змінюються за частотою в різних сигналу можна також використовувати комбінацію часових інтервалах. Для кожного часового інтерTDM та CDM. Наприклад, пілот-сигнал CDM можна валу оцінку каналу можна одержувати для піддіапосилати в декількох періодах символу, а пілотпазонів даних, основуючись на широкосмуговому сигнал TDM можна посилати в інших періодах сипілот-сигналі. мволу. Мультиплексований з частотним розділенФіг.5А-6 показують зразкові схеми передачі піням каналів (FDM) пілот-сигнал можна також полот-сигналу і даних. Пілот-сигнал і дані можна тасилати у визначеному наборі піддіапазонів, кож передавати іншими способами, використовуюнаприклад, для низхідного каналу зв'язку. чи будь-яку комбінацію TDM, CDM і/або деяких Для варіантів здійснення, показаних на Фіг.5Aінших схем мультиплексування. 5D, пілот-сигнал TDM або CDM посилають в N Пілот-сигнали TDM та CDM можна генерувати піддіапазонах, що використовуються для передачі різними способами. В одному з варіантів здійсненданих. У загальному випадку піддіапазони, що ня пілотні символи, що використовуються для гевикористовуються для передачі пілот-сигналу (або нерації пілот-сигналів TDM та CDM, є символами просто пілотні піддіапазони), можуть бути тими ж модуляції відомої сукупності сигналу, такою як самими або відрізнятися від піддіапазонів, що виQPSK (4-х кратна фазова маніпуляція). Послідовкористовуються для передачі даних (або просто ність з N символів модуляції може використовувапіддіапазонів даних). Пілот-сигнал можна також тися для схеми пілот-сигналу TDM, показаної на посилати в меншій або більшій кількості піддіапаФіг.5А, і схеми пілот-сигналу CDM, показаної на зонів даних. Піддіапазони даних і пілотні піддіапаФіг.5С. Послідовність з N/M символів модуляції зони можуть бути сталими протягом всієї передачі. може використовуватися для схеми пілот-сигналу Альтернативно, піддіапазони даних і пілотні піддіTDM, показаної на Фіг.5В, і схеми пілот-сигналу апазони можуть стрибкоподібно змінюватися за CDM, показаної на Фіг.5D. Кожну з послідовностей частотою в різних часових інтервалах для досягз N символів модуляції і послідовностей з N/M синення частотного рознесення. Наприклад, фізичмволів модуляції можна вибирати так, щоб мати ний канал може бути зв'язаний із зразком, що (1) частотний спектр, який настільки рівномірний, стрибкоподібно змінюється за частотою (FH), який наскільки це можливе, і (2) часову обвідну, яка вказує один або більшу кількість визначених набозмінюється як можна менше. Рівномірний частотрів піддіапазонів або груп для використання для ний спектр гарантує, що всі піддіапазони, що викофізичного каналу в кожному часовому інтервалі. ристовуються для передачі пілот-сигналу, мають Часовий інтервал може охоплювати один або достатню потужність для надання можливості множину періодів символу. приймачу належно оцінювати посилення каналу 19 90133 20 для цих піддіапазонів. Стала обвідна усуває споn 1 2 Q / N для парних N творення за допомогою блоків схеми, таких як підРівн. (6) n n 1 n Q / N для непарних N силювач потужності. В іншому варіанті здійснення пілотні символи, що використовуються для генерації пілот-сигналів У рівнянні (6) Q та N є взаємно простими чисTDM та CDM, формують, основуючись на багатолами. Рівняння (3) призначене для послідовності фазній послідовності, яка має хороші часові і спекГоломба, рівняння (4) - для послідовності Р3, рівтральні характеристики. няння (5) - для послідовності Р4, і рівняння (6) Наприклад, пілотні символи можна генерувати для послідовності Чу. Послідовності Р3, Р4 та Чу таким чином: можуть мати будь-яку довільну довжину. Пілотні символи можна також генерувати таким чином: Рівн. (2) p n e j n , для n 1,..., N де фазу n можна одержувати, основуючись на будь-якому з наступних рівнянь: ·(n-1)n ·(n-1)2 n= ·[(n-1)·(n-Ν-1)] n= n= l,m=2 l,m=-( l,m Рівн. (3) Рівн. (4) Рівн. (5) (l-1)·(m-1)/T /Τ)·(Τ-2l+1)·[(l-1)·T+(m-1)] / T T 2l 1 T - 1 / 2 / T T 2l 1 T - 2 / 2 j p l 1 T m pl,m e д ля l 1,..., T та m 1 l, m , Рівн. (7) де фазу l,m можна одержувати, основуючись на будь-якому з наступних рівнянь: Рівн. (8) Рівн. (9) m 1 для парних T m 1 для неп арних T Рівняння (8) призначене для послідовності Френка, рівняння (9) - для послідовності Р1, і рівняння (10) - для послідовності Рх. Довжина послідовностей Френка, P1 та Рх обмежені Ν=Τ2, де Т позитивне ціле число. Послідовність пілотних символів, згенерована, основуючись на будь-якому з описаних вище багатофазних послідовностей, має і рівномірний частотний спектр, і сталу обвідну часової ділянки. Можуть також використовуватися інші багатофазні послідовності, що мають хороші спектральні характеристики (наприклад, рівномірний або відомий частотний спектр) і хороші часові характеристики (наприклад, сталу або відому обвідну часової ділянки). Пілот-сигнали TDM або CDM, згенеровані за допомогою цієї послідовності пілотних символів, в такому випадку мали б (1) низьке PAPR, яке не спотворюється елементами схеми, такими як підсилювач потужності, і (2) рівномірний частотний спектр, який надає можливість приймачу точно оцінювати посилення каналу для всіх піддіапазонів, що використовуються для передачі пілотсигналу. Фіг.7А показує процес 700 генерації пілотного символу IFDMA. Першу послідовність пілотних символів формують, основуючись на багатофазній послідовності, яка може бути будь -якою з описаних вище багато фазних послідовностей або деякою іншою багатофазною послідовністю (блок 710). Першу послідовність пілотних символів п овторюють багато разів для одержання другої послідовності пілотних символів (блок 712). Пилк оподібний фазовий сигнал застосовують до другої послідовності пілотних символів для одержання третьої послідовності символів, які виводяться, (блок 714). Пилкоподібний фазовий сигнал можна застосовувати в цифровій формі до пілотних символів або обчислювати за допомогою процесу перетворення частоти з підвищенням. Циклічний Рівн. (10) префікс додають до третьої послідовності символів, які виводяться, для одержання четвертої послідовності символів, які виводяться, яка є пілотним символом IFDMA (блок 716). Пілотний символ IFDMA передають у часовій ділянці через канал зв'язку (блок 718). Хоча не показано на Фіг.7 для простоти, пілотні символи можна мультиплексувати з символами даних, використовуючи TD M і/або CDM, наприклад, як описано вище для Фіг.5A-5D. Фіг.7В показує процес 750 генерації пілотного символу LFDMA. Першу послідовність пілотних символів формують, основуючись на багатофазній послідовності, яка може бути будь -якою з описаних вище багато фазних послідовностей або деякою іншою багатофазною послідовністю (блок 760). Першу послідовність з N пілотних символів перетворюють в частотну ділянку за допомогою Nточкового ШПФ для одержання другої послідовності з N символів частотної ділянки (блок 762). N символів частотної ділянки потім відображають на N піддіапазонів, що використовуються для передачі пілот-сигналу, і нульові символи відображають на K-N піддіапазонів, що залишилися, для одержання третьої послідовності з K символів (блок 764). Третю послідовність з K символів перетворюють у часову ділянку за допомогою Kточкового ОШПФ для одержання четвертої послідовності з K символів часової ділянки, що виводяться, (блок 766). Циклічний префікс додають до четвертої послідовності символів, які виводяться, для одержання п'ятої послідовності з K+С символів, які виводяться, яка є пілотним символом LFDMA (блок 768). Пілотний символ LFDMA передають у часовій ділянці через канал зв'язку (блок 770). Хоча не показані на Фіг.7В для простоти, пілотні символи можна мультиплексувати з символами даних, використовуючи TD M і/або CDM, наприклад, як описано вище для Фіг.5 A-5D. 21 90133 22 І для IFD MA, і для LFDMA, кількість піддіападля кожного символу SC-FDMA, що містить пілотзонів, що використовуються для передачі пілотсигнал TDM. сигналу, може бути тією самою або відрізнятися Для схеми пілот-сигналу CDM, показаної на від кількості піддіапазонів, що використовуються Фіг.5С, Μ прийнятих символів SC-FDMA, що місдля передачі даних. Наприклад, користувачеві тять пілот-сигнал CDM, обробляють для відновможе бути призначено 16 піддіапазонів для перелення пілотних символів таким чином: дачі даних і вісім піддіапазонів для передачі пілотсигналу. Інші вісім піддіапазонів можуть бути призM начені іншому користувачеві для передачі даРівн. (11) rp n p,i r t i , n , для n 1,..., K них/пілот-сигналу. Множина користувачів може i 1 спільно використовувати той самий набір піддіапазонів для структури 100 переміжних піддіапазонів де r(ti, n) є прийнятим відліком для періоду n на Фіг.1 або ту ж саму груп у піддіапазонів для відліків в періоді символу ti; структури 300 вузькосмугових піддіапазонів на p,i - і-тий елементарний сигнал ортогональної Фіг.3. послідовності для пілот-сигналу; і Для структури 100 переміжних піддіапазонів на rр(n) - прийнятий пілотний символ для періоду Фіг.1 пілот-сигнал FDM може передаватися в одній n відліків. або більшій кількості наборів піддіапазонів для Рівняння (11) передбачає, що пілот-сигнал надання можливості приймачу виконувати різні CDM передають в періодах символу t 1-tM , де Μ функції, такі як, наприклад, оцінка каналу, супровід довжина ортогональної послідовності. K прийнятих за частотою, часове відстеження тощо. В першому пілотних символів одержують з рівняння (11) для рознесеному пілот-сигналі FDM, пілотні символи пілот-сигналу CDM. IFDMA передають в наборі ρ піддіапазонів в декіДля схеми пілот-сигналу CDM, показаної на лькох періодах символу, і в наборі p+S/2 піддіапаФіг.5D, кожний прийнятий символ SC-FDMA, що зонів в інших періодах символу. Наприклад, якщо містить пілот-сигнал CDM, обробляють для відноS=8, то пілотні символи IFDMA можна передавати, влення пілотних символів таким чином: використовуючи зразок рознесення {3, 7}, так, щоб пілотні символи IFDMA посилали в наборі 3 піддіM апазонів, потім в наборі 7 піддіапазонів, потім в rp n p,i r n 1 M i , для n 1,..., K / M Рівн. (12) наборі 3 піддіапазонів тощо. У другому рознесеi 1 ному пілот-сигналі FDM пілотні символи IFDMA передають в наборі p(t)=[p(t-1)+ p]modS+1 піддіаде г((n-1)·М+і) прийнятий відлік для періоду віпазонів в періоді символу t, де p - різниця між дліків (n-1)-М+і в прийнятому символі SC-FDMA з індексами наборів піддіапазонів для двох послідопілот-сигналом CDM. K/M прийнятих пілотних симвних періодів символу, і+1 призначене для схеми волів одержують з рівняння (12) для пілот-сигналу індексації, яка починається з 1 замість 0. НаприCDM. Частотно вибірковий канал зв'язку викликає клад, якщо S=8 та p=3, то пілотні символи IFDMA можна передавати, використовуючи зразок рознеміжсимвольну інтерференцію (МСІ). Однак МСІ сення {1, 4, 7, 2, 5, 8, 3, 6} так, щоб пілотні символи обмежена в межах одного символу SC-FDMA через циклічний префікс. Крім того, через циклічний IFDMA посилали в наборі 1 піддіапазонів, потім в префікс, операція лінійної згортки внаслідок імп унаборі 4 піддіапазонів, потім в наборі 7 піддіапазонів тощо. Можуть також використовуватися інші льсної характеристики каналу фактично стає цикзразки рознесення. Рознесений пілот-сигнал FDM лічною згорткою, подібно до OFDMA. Тому можна надає можливість приймачу одержувати оцінки виконувати оцінку каналу, вирівнювання та інші операції в частотній ділянці, коли пілотні символи і посилення каналу для більшої кількості піддіапасимволи даних не посилають в тому ж самому зонів, що може поліпшувати оцінку каналу та ефективність виявлення. символі SC-FDMA. Фіг.8 показує процес 800, що виконується Для схеми TDM, показаної на Фіг.5А та схеми приймачем для оцінки характеристики каналу зв'яCDM, показаної на Фіг.5С, приймач одержує K прийнятих пілотних символів для кожної передачі зку, основуючись на пілот-сигналі TDM або пілотпілот-сигналу. K-точкове ШПФ можна виконувати сигналі CDM, посланому передавачем. Приймач одержує символ SC-FDMA для кожного періоду для K прийнятих пілотних символів, r р(n) для символу і видаляє циклічний префікс в прийнятому n=1,..., K, для одержання K значень прийнятого символі SC-FDMA (блок 810). Для IFDMA, приймач пілот-сигналу в частотній ділянці, R p(k) для k=1,..., K (блок 814). Значення прийнятого пілот-сигналу видаляє пилкоподібний фазовий сигнал в прийняможна задавати як: тому символі SC-FDMA. І для IFDMA, і для LFD MA, приймач одержує K прийнятих символів даних/пілотних символів для символу SC-FDMA. R p(k)=H(k)·P(k)+N(k), для k=1,..., K Рівн. (13) Приймач потім відміняє TDM, або CDM, вик оде Р(k) - значення переданого пілот-сигналу нану для пілот-сигналу (блок 812). Для схеми підля піддіапазону k; лот-сигналу TD M, показаної на Фіг.5А, K прийнятих пілотних символів, rр(n) для n=1,..., K, одержують Н(k) - сукупне посилення каналу зв'язку для для кожного пілотного символу SC-FDMA. Для піддіапазону k; схеми пілот-сигналу TDM, показаної на Фіг.5В, R p(k) - значення прийнятого пілот-сигналу для піддіапазону k; і множину прийнятих пілотних символів одержують N(k) - шум для піддіапазону k. 23 90133 24 K-точкове ШПФ забезпечує K значень прийнявідліків BW МГц) було б досить для визначення того пілот-сигналу для всіх K піддіапазонів. Зберіхарактеристики каналу зв'язку, основуючись на гають тільки N оцінок прийнятих пілот-сигналів для збудженні цього імпульсу. Кількість сигналів (L) N піддіапазонів, що використовуються для передля імпульсної характеристики каналу залежить дачі пілот-сигналу (які називають пілотними піддівід діапазону затримок системи, який є різницею у апазонами), а інші K-N значень прийнятих пілотчасі між найбільш раннім і найбільш останнім присигналів не враховують (блок 816). Різні пілотні буваючими екземплярами сигналу з достатньою піддіапазони використовуються для IFDMA та енергією в приймачі. Більш тривалий діапазон заLFDMA, і отже різні значення прийнятих пілоттримок відповідає більшому значенню L, і навпаки. сигналів зберігають для IFDMA та LFDMA. ЗбереОцінку імпульсної характеристики каналу можжені значення пілот-сигналу означають як R p(k) на одержувати, основуючись на N оцінках посидля k=1,..., N. Для простоти можна передбачити, лення каналу і використовуючи методики LS або що шум є адитивним білим Гауссівським шумом MMSE (блок 820). Оцінку імпульсної характеристи(AWGN) з нульовим середнім значенням і дисперки каналу методом найменших квадратів за допосією N 0. ˆ могою L сигналів, hls n для n=1,..., L, можна одеПриймач може оцінювати частотну характериржувати, основуючись на вихідній оцінці частотної стику каналу, використовуючи різні методики оцінхарактеристики, таким чином: ки каналу, такі як методика MMSE, методика найменших квадратів (LS) тощо. Приймач одержує 1 оцінки посилення каналу для N пілотних піддіапаˆ lx ˆ Рівн. (18) hLx1 WH WNxL WH Hinit зонів, основуючись на N значеннях прийнятого NxL NxL Nx1 пілот-сигналу і використовуючи методику MMSE або LS (блок 818). Для методики MMSE, ви хідну ˆ init ˆ оцінку частотної характеристики каналу зв'язку де HNx 1 - вектор Nx1, що містить Hls k або можна одержувати, основуючись на значеннях ˆ Hmmsek для k=1,..., N; прийнятого пілот-сигналу, таким чином: WNxL - субматриця матриці Фур'є W KxK; Rp k P * k ˆ ˆ lx ˆ Hmmse k , для k 1,..., N Рівн. (14) hLx1 - вектор Lx1, що містить hls n для 2 Pk N0 n=1,..., L; і «H» означає спряжене транспонування. Матрицю Фур'є W KxK визначають так, що (u, v)ˆ де Hmmsek - оцінка посилення каналу для тий елемент fu,v, задається як: піддіапазону k, і «*» означає комплексне спряження. Вихідна оцінка частотної характеристики місu 1 v 1 j2 тить N значень посилення каналу для N пілотних K Рівн. (19) fu, v e , піддіапазонів. Послідовність пілотних символів можна генерувати, основуючись на багатофазній для u 1,..., K та v 1,..., K послідовності, що має рівномірну частотн у характеристику. У цьому випадку, |Р(k)|=1 для всіх знаде u є індексом рядка, і ν - індексом стовпця. чень k, і рівняння (14) може бути виражене як: WNxL містить N рядків WKxK , які відповідають N пілотним піддіапазонам. Кожний рядок WNxL містить Rp k P * k ˆ ˆ lx Hmmse k , для k 1,..., N Рівн. (15) перші L елементів відповідного рядка WKxK. hLx1 1 N0 містить L сигналів оцінки імпульсної характеристики каналу за методом найменших квадратів. Сталий множник 1/(1+N 0) можна видалити для Оцінку імпульсної характеристики каналу забезпечення незміщеної оцінки частотної харакˆ теристики MMSE, яка може бути виражена як: MMSE з L сигналами, hmmsen для n=1,..., L, можна одержувати, основуючись на вихідній оцінці ˆ частотної характеристики, таким чином: Hmmse k Rp k P * k , для k 1,..., N Рівн. (16) Для методики LS вихідну оцінку частотної характеристики можна одержувати, основуючись на значеннях прийнятого пілот-сигналу, таким чином: ˆ Hls k Rp k Pk , для k 1,..., N Рівн. (17) Імпульсну характеристику каналу зв'язку можна характеризувати за допомогою L сигналів, де L може бути набагато менше N. Тобто якщо імпульс застосовують до каналу зв'язки за допомогою передавача, то L відліків часової ділянки (з частотою ˆ hmmse Lx1 WH WNxL NLxL NxL 1 Рівн. ˆ WH Hinit NxL Nx1 (20) де NLxL - матриця автоковаріації LxL шуму та інтерференції. Для адитивного білого Гауссівського шуму (AWGN) матрицю автоковаріації можна 2 2 задавати як NLxL n I , де n - шумова дисперсія. N-точкове ОШПФ можна також виконувати для вихідної оцінки частотної характеристики для одержання оцінки імпульсної характеристики каналу з N сигналами. 25 90133 26 Фільтрацію і/або подальшу обробку вихідної також бути одержані іншими способами, викорисоцінки частотної характеристики і/або оцінки імп утовуючи інші методики оцінки каналу. льсної характеристики каналу можна виконувати Різні операції подальшої обробки можна вик одля поліпшення якості оцінки каналу, як описано нувати для поліпшення якості оцінки каналу. У нижче (блок 822). Кінцева оцінка частотної хараквизначених середовищах, таких як середовище теристики для всіх K піддіапазонів може бути одебагатопроменевого поширення із завмираннями, ржана (1) за допомогою доповнення нулями Lканал зв'язку часто має тільки невелику кількість сигнальної або N-сигнальної оцінки імпульсної сигналів у часовій ділянці. Описана вище оцінка характеристики каналу до довжини K і (2) викоканалу може забезпечувати оцінку імпульсної ханання K-точкового ШПФ розширеної оцінки імпурактеристики каналу, що має велику кількість сигльсної характеристики (блок 824). Кінцева оцінка налів через шум. Подальша обробка намагається частотної характеристики для всіх K піддіапазонів видаляти сигнали, які виникають через шум, і збеможе також бути одержана за допомогою (1) інтерігати сигнали, які передають в каналі. рполяції N оцінок посилення каналу, (2) вик онання В одній із схем подальшої обробки, яку назиапроксимації за методом найменших квадратів N вають зрізанням, зберігають тільки перші L сигнаоцінок посилення каналу або (3) використовуючи лів оцінки імпульсної характеристики каналу, а інші інші методики апроксимації. сигнали замінюють нулями. В іншій схемі подальПриймач може одержувати більш тривалу оцішої обробки, яку називають порівнянням з порогонку імпульсної характеристики каналу, основуювим значенням, сигнали з низькою енергією замічись на рознесеному пілот-сигналі FDM. У загальнюють нулями. В одному з варіантів здійснення ному випадку оцінка імпульсної характеристики порівняння з пороговим значенням виконують таканалу за допомогою L T сигналів може бути одерким чином: жана, основуючись на пілотних символах IFDMA, посланих на L T різних піддіапазонах в одному або ˆ 2 h , 0для h n більшій кількості періодів символу. Наприклад, th Рівн. (21) ˆ hn { для n 1,..., K якщо L T=2N, то оцінка імпульсної характеристики ˆ n інакше h , за допомогою 2N сигналів може бути одержана, основуючись на двох або більшій кількості пілотних символів IFDMA, посланих в дво х або більшій кількості наборів піддіапазонів в двох або більшій кількості періодів символу. Оцінку імпульсної характеристики повної тривалості за допомогою K сигналів можна одержувати, якщо пілот-сигнал передають у всіх S наборах піддіапазонів, використовуючи повністю рознесений зразок. Приймач може одержувати більш тривалу оцінку імпульсної характеристики тривалості LT, фільтруючи початкові оцінки імпульсної характеристики тривалості N для достатньої кількості різних наборів піддіапазонів. Кожна вихідна оцінка імпульсної характеристики може бути одержана, основуючись на пілотному символі IFDMA для одного набору піддіапазонів. Якщо пілот-сигнал передають в різних наборах піддіапазонів в кожному періоді символу, то фільтрацію можна виконувати за достатньою кількістю періодів символу, для одержання більш тривалої оцінки імпульсної характеристики. Для SC-FDMA фільтрацію можна виконувати для початкових оцінок частотної характеристики, оцінок імпульсної характеристики каналу за методом найменших квадратів або MMSE і/або кінцевих оцінок частотної характеристики, одержаних для різних періодів символу для поліпшення якості оцінки каналу. Фільтрація може бути основана на фільтрі кінцевої імпульсної характеристики (FIR), фільтрі нескінченної імпульсної характеристики (IIR) або на деякому іншому типі фільтра. Коефіцієнти фільтра можна вибирати для досягнення необхідного ступеня фільтрації, який можна вибирати, основуючись на виборі оптимального співвідношення між різними факторами, такими як, наприклад, необхідна якість оцінки каналу, можливість відстеження швидкої зміни в каналі, складність фільтра тощо. Оцінка частотної характеристики і/або оцінка імпульсної характеристики каналу зв'язк у можуть ˆ де h n - n-ний сигнал оцінки імпульсної харакˆ теристики каналу, яка може бути hmmsen або ˆ hls n ; і hth - порогове значення, що використовується для обнуління сигналів з низькою енергією. Порогове значення h th можна обчислювати, основуючись на енергії всіх K сигналів або тільки L перших сигналів оцінки імпульсної характеристики каналу. Те ж саме порогове значення може використовуватися для всі х си гналів. Альтернативно, різні порогові значення можуть використовуватися для різних сигналів. Наприклад, перше порогове значення може використовуватися для перших L сигналів, і друге порогове значення (яке може бути нижче першого порогового значення) може використовуватися для інши х сигналів. У ще одній схемі подальшої обробки, яку називають вибором сигналу, В кращих сигналів оцінки імпульсної характеристики каналу зберігають, де В 1, і інші сигнали встановлюють в нуль. Кількість сигналів, які будуть зберігати (визначено як В), може бути фіксованим або змінним значенням. В можна вибирати, основуючись на відношенні «сигнал до шуму та інтерференції» (SNR) прийнятого сигналу для передачі пілот-сигналу/даних, спектральної ефективності пакету даних, для якого використовується оцінка каналу, і/або на деякому іншому параметрі. Наприк лад, два кращих сигнали можна зберігати, якщо SNR прийнятого сигналу знаходиться в межах першого діапазону (наприклад, від 0 до 5 децибел (дБ)), три кращих сигнали можна зберігати, якщо SNR прийнятого сигналу знаходиться в межах другого діапазону (наприклад, від 5 до 10дБ), чотири кращих сигнали можна зберігати, якщо SNR прийнятого сигналу 27 90133 28 знаходиться в межах третього діапазону (напривирівняних значень даних, Z d(k) для k=1,..., N, моклад, від 10 до 15дБ), тощо. жна перетворювати назад у часову ділянку для Оцінку каналу можна виконувати у часовій діодержання послідовності з N оцінок символу далянці для схеми пілот-сигналу TDM, показаної на ˆ них, d n для n=1,..., N, які є оцінками N символів Фіг.5В, схеми пілот-сигналу CDM, показаної на даних в ви хідній послідовності. Фіг.5D, та інши х схем пілот-сигналу, в яких дані і Вирівнювання можна також виконувати у чапілотні символи посилають в тому ж самому симсовій ділянці для послідовності з K прийнятих символі SC-FDMA. Гребінчастий блок оцінки може волів даних таким чином: використовува тися для ідентифікації трактів передачі сильних сигналів, наприклад, за допомогою zd(n)=r d(n) g(n) Рівн. (24) (1) порівняння прийнятих символів з переданою послідовністю пілотного символу при різних зміде rd(n) означає послідовність з K прийнятих щеннях часу та (2) ідентифікації зміщень часу, які символів даних; забезпечують високі результати при порівнянні. g(n) означає імпульсну характеристику екваОцінка каналу у часовій ділянці забезпечує набір лайзера (блока вирівнювання) у часовій ділянці; сигналів для оцінки імпульсної характеристики zd(n) означає послідовність з K вирівняних сиканалу зв'язку. мволів даних; і Для всіх схем пілот-сигналу оцінка каналу заозначає операцію циклічної згортки. безпечує оцінку імпульсної характеристики каналу Частотна характеристика еквалайзера може і/або оцінку частотної характеристики, яка може бути одержана, основуючись на методиці MMSE використовува тися для вирівнюванняприйнятих символів даних. Послідовність з K прийнятих симˆ ˆ 2 N , для k=1,..., N. Часяк: G k H * k / H k 0 волів даних одержують для кожного символу даних SC-FDMA для схеми пілот-сигналу TDM, покатотну характеристику еквалайзера можна також заної на Фіг.5А, і для кожного набору з Μ одержувати, основуючись на методиці обернення прийнятих символів SC-FDMA для схеми пілотˆ сигналу CDM, показаної на Фіг.5С. Послідовність з в нуль незначущи х коефіцієнтів як: G k 1 / H k , K прийнятих символів даних можна вирівнювати у для k=1,..., N. Частотн у характеристику еквалайзечасовій ділянці або в частотній ділянці. ра можна перетворювати у часову ділянку для Вирівнювання в частотній ділянці можна вик оодержання імпульсної характеристики еквалайзенувати таким чином. K-точкове ШПФ спочатку вира, g(n) для n=1,..., N, яка використовується для конують з K прийнятими символами даних, r d(n) вирівнювання у часовій ділянці в рівнянні (24). для n=1,..., K, для одержання K значень прийнятих Послідовність з K вирівняних символів даних з даних частотної ділянки, R d(k) для k=1,..., K. Зберірівняння (24) містить S піків переданих символів гають тільки N значень прийнятих даних для N даних. S піків можна підсумовувати наростаючим піддіапазонів, що використовуються для передачі підсумком на основі «символ даних за символом даних, а інші K-N значень прийнятих даних не враданих» для одержання N оцінок символів даних ховують. Збережені значення даних позначають як таким чином: R d(k) для k=1,..., N. Вирівнювання можна виконувати в частотній S 1 ˆ ділянці для N значень прийнятих даних, викорисРівн. (25) dn z d i N n , для n 1,..., N товуючи методику MMSE, таким чином: i 0 Zd k ˆ Rd k H * k , для k ˆ 2 N Hk 0 1,..., N Рівн. (22) де R d(k) - значення прийнятих даних для k піддіапазону, ˆ H k - оцінка посилення каналу для k піддіапа ˆ ˆ зону, яка може дорівнювати Hmmsek або Hls k Zd(k) - вирівняне значення даних для k піддіапазону. Вирівнювання можна також виконувати в частотній ділянці для N прийнятих значень даних, використовуючи методику обернення в нуль незначущи х коефіцієнтів, таким чином: Zd k Rd k , для k ˆ Hk 1,..., N Рівн. (23) І для вирівнювання MMSE, і для вирівнювання із оберненням в нуль незначущи х коефіцієнтів, N Альтернативно, підсумовування наростаючим підсумком не виконують, і N вирівняних символів даних тільки для однієї копії переданих даних забезпечують як N оцінок символу даних. Приймач може також оцінювати інтерференцію, основуючись на значеннях прийнятого пілотсигналу та оцінці каналу. Наприклад, інтерференцію для кожного піддіапазону можна оцінювати таким чином: Ik ˆ HK P k Rd k 2 , для k 1,..., N Рівн. (26) де І(k) - оцінка інтерференції для k піддіапазону. Оцінку інтерференції І(k) можна усереднювати по всіх N піддіапазонах для кожного символу SCFDMA для одержання короткострокової оцінки інтерференції, яка може використовуватися для демодуляції даних і/або інших цілей. Короткострокову оцінку інтерференції можна усереднювати по численних символах SC-FDMA для одержання довгострокової оцінки інтерференції, яка може 29 90133 30 використовува тися для оцінки умов експлуатації Дві оцінки каналу, одержані за допомогою і/або в інших цілях. прийнятих пілотних символів і прийнятих символів Інші методики можуть також використовуватиданих, об'єднують для одержання поліпшеної п овся для поліпшення якості оцінки каналу, одержаної ної оцінки каналу. Це об'єднання можна виконуваз пілот-сигналу TDM або пілот-сигналу CDM. Ці ти, наприклад, таким чином: методики включають в себе ітераційну методику оцінки каналу і методику оцінки каналу за допомоˆ ˆ ˆ Hdata k Hpilot k Cp k Hdata k Cd k , Рівн. (27) гою даних. для k 1,..., N Для ітераційної методики оцінки каналу спочатку одержують вихідну оцінку каналу зв'язку, осноˆ вуючись на прийнятих пілотних символах, наприде Hpilot k - оцінка каналу, одержана, осноклад, використовуючи методику найменших вуючись на прийнятих пілотних символах; квадратів або MMSE. Ви хідна оцінка каналу викоˆ ристовується для одержання оцінки символу даHdata k - оцінка каналу, одержана, основуюних, як описано вище. В одному з варіантів здійсчись на прийнятих символах даних; нення інтерференцію через символи даних для С р(k) та C d(k) - коефіцієнти зважування для піпілотних символів оцінюють, основуючись на оцінлот-сигналу і даних, відповідно; і ˆ ках символу даних d n і вихідній оцінці каналу ˆ Hoverall k є повною оцінкою каналу. ˆ ˆ ˆ h n , наприклад, як ˆ n d n h n , де ˆ n ознаi i ˆ У загальному випадку Hoverall k можна одечає оцінку інтерференції. В іншому варіанті здійсржувати, основуючись на будь-якій функції нення оцінки символу даних обробляють для одеˆ ˆ Hpilot k , Hdata k , упевненості в надійності оціржання декодованих даних. Декодовані дані потім обробляють тим самим способом, який виконують нок символів даних і/або інших факторах. Описав передавачі, для одержання повторно модульоний вище процес може виконуватися ітераційним ваних символів даних, для яких виконують операˆ способом. Для кожної ітерації Hoverall k оновлюцію згортки з початковою оцінкою каналу для одержання оцінки інтерференції. Для обох варіантів ють, основуючись на оцінці каналу, одержаній з здійснення оцінку інтерференції віднімають з приˆ оцінок символу даних, і Hoverall k оновлену викойнятих пілотних символів для одержання пілотних ристовують для одержання нових оцінок символів ic даних. Методика оцінки каналу за допомогою дасимволів без інтерференції, rp n rp n ˆ n , які i них може використовуватися для всіх схем пілотпотім використовуються для одержання поліпшесигналу, які включають в себе схеми пілот-сигналу ної оцінки каналу. Процес можна повторювати для TDM та CDM, показані на Фіг.5A-5D. будь-якої кількості ітерацій для одержання прогреФіг.9 показує структурну схему передавача сивно кращих оцінок каналу. Ітераційна методика 910 і приймача 950. Для прямого каналу зв'язку оцінки каналу більш відповідає схемі пілот-сигналу передавач 910 є частиною базової станції, а прийTDM, показаній на Фіг.5В, схемам пілот-сигналу мач 950 є частиною безпровідного пристрою. Для CDM, показаним на Фіг.5С та 5D, та іншим схемам зворотного каналу зв'язку передавач 910 є частипілот-сигналу, в яких символи даних можуть виною безпровідного пристрою, а приймач 950 є часкликати міжсимвольну інтерференцію для пілотних тиною базової станції. Базова станція в загальносимволів. му випадку є стаціонарною станцією і її можуть Для методики оцінки каналу за допомогою датакож називати базовою приймальноних, прийняті символи даних використовуються передавальною системою (БПС), точкою доступу разом з прийнятими пілотними символами для або використовувати деяку іншу термінологію. оцінки каналу. Першу оцінку каналу одержують, Безпровідний пристрій може бути фіксованим або основуючись на прийнятих пілотних символах, і її мобільним телефоном і його можна також називавикористовують для одержання оцінки символу ти користувацьким терміналом, рухомою станцією даних. Другу оцінку каналу потім одержують, осноабо використовувати деяку іншу термінологію. вуючись на прийнятих символах даних та оцінках У передавачі 910 блок 920 обробки ПД даних і символу даних. В одному з варіантів здійснення пілот-сигналу обробляє дані трафіка для одерприйняті символи даних r d(n) перетворюють в оціжання символів даних, генерує пілотні символи і нки прийнятих даних частотної ділянки R d(k), і оцізабезпечує символи даних і пілотні символи. Моˆ нки символів даних d n перетворюють в значення дулятор 930 SC-FDMA мультиплексу є символи даних і пілотні символи, використовуючи TDM ˆ k . Другу оцінку каналу даних частотної ділянки D і/або CDM, і виконує модуляцію SC-FDMA (наприˆ клад, для IFDMA, LFD MA то що) для генерації симможна одержувати, замінюючи R d(k) на R p(k) і D k волів SC-FDMA. Блок 932 передачі (ПРД) обробна Р(k) в рівняннях з (14) по (18). В іншому варіанті ляє (наприклад, перетворює в аналогову форму, здійснення оцінки символу даних обробляють для посилює, фільтрує і перетворює з підвищенням одержання декодованих даних, і декодовані дані частоти) символи SC-FDMA і генерує модульоваобробляють для одержання повторно модульований за радіочастотою (РЧ) сигнал, який передають них символів даних D rm(k). Другу оцінку каналу через антену 934. можна одержувати, замінюючи R d(k) на R p(k) та У приймачі 950 антена 952 приймає передаD rm(k) на Р(k) в рівняннях з (14) по (18). ний сигнал і доставляє прийнятий сигнал. Блок 31 90133 32 954 прийому (ПРМ) приводить до визначеної форжання розширеної послідовності з K символів. ми (наприклад, фільтрує, посилює, перетворює з Блок 1114 пилкоподібного фазового сигналу з апониженням частоти і переводить в цифрову фостосовує пилкоподібний фазовий сигнал до розрму) прийнятий сигнал для генерації потоку приширеної послідовності символів для генерації посйнятих відліків. Демодулятор 960 SC-FDMA обролідовності символів, які виводяться, з бляє прийняті відліки та одержує прийняті символи перетвореною частотою. Пилкоподібний фазовий даних і прийняті пілотні символи. Блок оцінки касигнал визначає набір u піддіапазонів, що викориналу/блока 980 обробки одержує оцінку каналу, стовується для передачі. Генератор 1116 циклічосновуючись на прийнятих пілотних символах. ного префікса додає циклічний префікс до посліДемодулятор 960 SC-FDMA виконує вирівнювання довності символів з перетвореною частотою для прийнятих символів даних за допомогою оцінки генерації символу IFD MA. каналу і забезпечує оцінки символів даних. Блок Фіг.11В показує модулятор 930b SC-FDMA для 970 обробки прийнятих (ПР) символів зворотно LFDMA, який є іншим варіантом здійснення модувідображає, деперемежовує і декодує оцінки симлятора 930 SC-FDMA на Фіг.9. У межах модулятоволу даних і забезпечує декодовані дані. У загальра 930b блок 1122 ШПФ виконує N-точкове ШПФ ному випадку обробка за допомогою демодулятовихідної послідовності даних/пілотних символів ра 960 SC-FDMA і блока 970 обробки ПР даних є для одержання послідовності з N символів частотзворотною по відношенню до обробки за допомоної ділянки. Блок 1124 відображення символу на гою модулятора 930 SC-FDMA і блока 920 обробки піддіапазон відображає N символів частотної діляПД даних і пілот-сигналу, відповідно, в передавачі нки на N піддіапазонів, що використовуються для 910. передачі, і відображає K-N нульових символів на Контролери 940 та 990 керують роботою різK-N піддіапазонів, що залишилися. Блок 1126 них блоків обробки в передавачі 910 і приймачі ОШПФ виконує K-точкове ОШПФ K символів від 950, відповідно. Блоки 942 та 992 пам'яті зберігаблока 1124 відображення і забезпечує послідовють коди програм і дані, що використовуються ність з K символів, які виводяться, ділянки часу. контролерами 940 та 990, відповідно. Генератор 1128 циклічного префікса додає циклічФіг.10А показує структурну схему блока 920а ний префікс до послідовності символів, які вивообробки ПД даних і пілот-сигналу, який є варіандяться, для генерації символу LFDMA. том здійснення блока 920 обробки на Фіг.9 і може Фіг.12А показує структурну схему демодулятовикористовува тися для схем пілот-сигналу TDM. У ра 960а SC-FDMA, який є варіантом здійснення блоці 920а обробки дані трафіка кодують за доподемодулятора 960 на Фіг.9 і може використовувамогою кодера 1012, перемежовують за допомогою тися для TDM схеми пілот-сигналу IFDMA. У меперемежовувача 1014 і відображають на символи жах демодулятора 960а SC-FDMA блок 1212 виданих за допомогою блока 1016 відображення далення циклічного префікса видаляє циклічний символу. Генератор 1020 пілот-сигналу генерує префікс для кожного прийнятого символу IFDMA. пілотні символи, наприклад, основуючись на багаБлок 1214 видалення пилкоподібного фазового тофазній послідовності. Мультиплексор (МПЛ) сигналу видаляє пилкоподібний фазовий сигнал в 1022 приймає і мультиплексує символи даних з кожному прийнятому символі IFDMA. Видалення пілотними символами, основуючись на керуванні пилкоподібного фазового сигналу може також виTDM, і забезпечує потік мультиплексованих даних конуватися за допомогою перетворення з пониі пілотних символів. женням частоти з РЧ в смугу немодульованих часФіг.10В показує структурну схему блока 920b тот. Демультиплексор (ДМПЛ) 1220 приймає обробки ПД даних і пілот-сигналу, який є іншим сигнал, що виводиться, з блока 1214 і забезпечує варіантом здійснення блока 920 обробки на Фіг.9 і прийняті символи даних до еквалайзера 1230, і може використовуватися для схем пілот-сигналу забезпечує прийняті пілотні символи до блока 980 CDM. У блоці 920b обробки дані трафіка кодують оцінки каналу. Блок 980 оцінки каналу одержує за допомогою кодера 1012, перемежовують за оцінку каналу, основуючись на прийнятих пілотних допомогою перемежовувача 1014 і відображають символах, наприклад, використовуючи методику на символи даних за допомогою блока 1016 відонайменших квадратів або MMSE. Еквалайзер 1230 браження символу. Блок 1024а множення помновиконує вирівнювання прийнятих символів даних жує кожний символ даних на ортогональну посліза допомогою оцінки каналу у часовій ділянці або довність з Μ елементарних сигналів {w d} для даних частотній ділянці і забезпечує вирівняні символи і забезпечує Μ масштабованих символів даних. даних. Накопичувальний підсумовувач 1232 підсуТочно так само блок 1024b множення помножує мовує наростаючим підсумком вирівняні символи кожний пілотний символ на ортогональну послідоданих, які відповідають множині піків того ж самого вність з Μ елементарних сигналів {w p} для пілотпереданого символу даних, і забезпечує оцінки сигналу і забезпечує Μ масштабованих пілотних символу даних. символів. Підсумовувач 1026 підсумовує масштаФіг.12В показує структурну схему демодулятобовані символи даних з масштабованими пілотнира 960b SC-FDMA, який є іншим варіантом здійсми символами, наприклад, як показано на Фіг.5С нення демодулятора 960 на Фіг.9 і може викорисабо 5D, і забезпечує об'єднані символи. товуватися для CDM схеми пілот-сигналу IFD MA. Фіг.11А показує модулятор 930а SC-FDMA для Демодулятор 960b SC-FDMAвключає в себе багаIFDMA, який є варіантом здійснення модулятора токанальний приймач даних, який відновлює п е930 SC-FDMA на Фіг.9. У межах модулятора 930а редані символи даних, і багатоканальний приймач блок 1112 повторення повторює вихідну послідовпілот-сигналу, який відновлює передані пілотні ність даних/пілотних символів S разів для одерсимволи. Для багатоканального приймача даних 33 90133 34 блок 1224а множення помножує сигнал, що вивоність з Μ елементарних сигналів {w p} і забезпечує диться, з блока 1214 на ортогональну послідовΜ масштабованих пілотних символів для кожного ність даних з Μ елементарних сигналів {w d} і запереданого пілотного символу, які підсумовують безпечує масштабовані символи даних. наростаючим підсумком за допомогою підсумовуНакопичувальний підсумовувач 1226а підсумовує вача 1326b, для одержання прийнятого пілотного наростаючим підсумком Μ масштабованих симвосимволу для переданого пілотного символу. Облів даних для кожного переданого символу даних і робка за допомогою подальших блоків в межах забезпечує прийнятий символ даних. Для багатодемодулятора 960d SC-FDMA аналогічна до опиканального приймача пілот-сигналу блок 1224b саної вище для демодулятора 960с SC-FDMA. множення помножує вихідний сигнал блока 1214 Описані методики передачі пілот-сигналу та на пілотну ортогональну послідовність з Μ елем еоцінки каналу можуть втілюватися за допомогою нтарних сигналів {w p} і забезпечує Μ масштабоварізних засобів. Наприклад, ці методики можуть них пілотних символів для кожного переданого втілюватися в обладнанні, програмному забезпепілотного символу, які підсумовують наростаючим ченні або в їх комбінації. Для втілення в обладпідсумком за допомогою нагромаджуючого підсунанні, блоки обробки, що використовуються для мовувача 1226b для одержання прийнятого пілотгенерації і передачі пілот-сигналу в передавачі ного символу для переданого пілотного символу. (наприклад, кожний з блоків обробки, показаних на Обробка за допомогою подальших блоків в межах Фіг.9-13В, або комбінації блоків обробки), можуть демодулятора 960b SC-FDMA аналогічна до опивтілюватися в одній або більшій кількості спеціалісаної вище для демодулятора 960а SC-FDMA. зованих інтегральних схем (СпІС), процесорів обФіг.13А показує структурну схему демодуляторобки цифрових сигналів (ПОЦС), пристроїв оброра 960с SC-FDMA, який є ще одним варіантом бки цифрових сигналів (ПОЦС), програмованих здійснення демодулятора 960 на Фіг.9 і може вилогічних пристроїв (ПЛП), програмованих вентилькористовуватися для TD M схеми пілот-сигналу них матриць (ПВМ), процесорів, контролерів, мікLFDMA. У межах демодулятора 960с SC-FDMA роконтролерів, мікропроцесорів, електронних приблок 1312 видалення циклічного префікса видаляє строїв, інших електронних блоків, призначених для циклічний префікс для кожного прийнятого симвовиконання описаних функцій, або в їх комбінації. лу LFD MA. Блок 1314 ШПФ виконує K-точкове Блоки обробки, що використовуються для вик оШПФ символу LFDMA після видалення циклічного нання оцінки каналу в приймачі, можна також втіпрефікса і забезпечує K значень частотної ділянки. лювати в межах однієї або більшої кількості СпІС, Блок 1316 зворотного відображення піддіапазону ПОЦС, електронних пристроїв тощо. на символ приймає K значень частотної ділянки, Для втілення в програмному забезпеченні, дазабезпечує N значень частотної ділянки для N ні методики можна втілювати за допомогою модупіддіапазонів, що використовуються для передачі, лів (наприклад, процедур, функцій тощо), які викоі не враховує інші значення частотної ділянки. нують описані функції. Програмні коди можуть Блок 1318 ОШПФ виконує N-точкове ШПФ N зназберігатися в блоці пам'яті (наприклад, в блоці 942 чень частотної ділянки з блока 1316 зворотного або 992 пам'яті на Фіг.9) і виконуватися за допомовідображення і забезпечує N прийнятих символів. гою блоків обробки (наприклад, контролерів 940 Демультиплексор 1320 приймає вихідний сигнал з або 990). Блок пам'я ті може втілюватися в межах блока 1318, забезпечує прийняті символи даних блока обробки або поза блоком обробки. до еквалайзера 1330 і забезпечує прийняті пілотні Попередній опис розкритих варіантів здійсненсимволи до блока 980 оцінки каналу. Еквалайзер ня представлений для забезпечення можливості 1330 виконує вирівнювання прийнятих символів будь-якому фа хівцеві виготовляти або використоданих у часовій ділянці або частотній ділянці за вувати даний винахід. Різні модифікації цих варіадопомогою оцінки каналу з блока 980 оцінки канантів здійснення будуть цілком очевидні фахівцям, і лу і забезпечує оцінки символів даних. визначені в даному описі загальні принципи моФіг.13В показує структурну схему демодулятожуть застосовуватися до інших варіантів здійсненра 960d SC-FDMA, який є ще одним варіантом ня, не відступаючи від обсягу або суті винаходу. здійснення демодулятора 960 на Фіг.9 і може виТаким чином даний винахід не обмежений описакористовуватися для CDM схем и пілот-сигналу ними варіантами здійснення, але повинен відповіLFDMA. Демодулятор 960d SC-FDMA включає в дати найширшій формі, сумісній з розкритими себе багатоканальний приймач даних, який віднопринципами і новими ознаками. влює передані символи даних, і багатоканальний Перелік посилальних позицій приймач пілот-сигналу, який відновлює передані 100 Зразкова структура під діапазонів пілотні символи. Для багатоканального приймача 210 Вихідна послідовність даних блок 1324а множення помножує ви хідний 212 Розширена послідовність сигнал з блока ОШПФ 1318 на ортогональну пос214 Послідовність з перетвореною частотою лідовність даних з Μ елементарних сигналів {w d} і 216 Блок - Копіюють останні С символів забезпечує масштабовані символи даних. Накопи300 Зразкова структура вузькосмугових під дічувальний підсумовувач 1326а підсумовує наросапазонів таючим підсумком Μ масштабованих символів 410 Вихідна послідовність даних для кожного переданого символу даних і 412, 416 Послідовність в частотній ділянці забезпечує прийнятий символ даних. Для багато414 Відображена послідовність канального приймача пілот-сигналу блок 1324b 500 Схема пілот-сигналу TDM з пілотмноження помножує ви хідний сигнал з блока сигналами і даними, що мультиплексуються за ОШПФ 1318 на пілотну ортогональну послідовперіодами символу 35 90133 36 510 Схема пілот-сигналу TDM з пілот820 Одержують оцінку імпульсної характериссигналами і даними, що мультиплексуються за тики каналу, основуючись на N оцінках посилення періодами відліків каналу і використовуючи методику LS або MMSE 530 Схема пілот-сигналу CDM з пілот822 Виконують фільтрацію і/або подальшу обсигналами і даними, що об'єднуються за періодаробку для поліпшення якості оцінки каналу ми символу 824 Одержують кінцеву оцінку часто тної хара549 Схема пілот-сигналу CDM з пілотктеристики для всіх K піддіапазонів, основуючись сигналами і даними, що об'єднуються за періодана оцінці імпульсної характеристики каналу ми відліків 910 Передавач 600 Схема широкосмугового пілот-сигналу 920 Блок обробки ПД даних і пілот-сигналу 700 Процес генерації пілотного символу 920а Блок обробки ПД даних і пілот-сигналу IFDMA (для пілот-сигналу TDM) 710 Формують першу послідовність пілотних 920b Блок обробки ПД даних і пілот-сигналу символів, основуючись на багатофазній послідов(для пілот-сигналу CDM) ності 930 Модулятор SC-FDMA 712 Повторюють першу послідовність пілотних 930b Модулятор SC-FDMA (для LFD MA) символів множину разів для одержання другої по932 Блок передачі (ПРД) слідовності пілотних символів 934 Антена передавача 714 Застосовують пилкоподібний фазовий си940, 990 Контролер гнал до другої послідовності пілотних символів для 942, 992 Пам'я ть одержання третьої послідовності символів, які ви950 Приймач водяться 952 Антена приймача 716 Додають циклічний префікс до третьої по954 Блок прийому (ПРМ) слідовності символів, які виводяться, для одер960 Демодулятор SC-FDMA жання пілотного символу IFD MA 960а Демодулятор SC-FDMA (для пілот718 Передають пілотний символ IFDMA у часигналу IFD MA TDM) совій ділянці 960b Демодулятор SC-FDMA (для пілот750 Процес генерації пілотного символу сигналу IFD MA CD M) LFDMA 960с Демодулятор SC-FDMA (для пілот760 Формують першу послідовність пілотних сигналу LFDMA TD M) символів, основуючись на багатофазній послідов960d Демодулятор SC-FDMA (для пілотності сигналу LFDMA CDM) 762 Перетворюють першу послідовність пілот970 Блок обробки ПР даних них символів в частотну ділянку та одержують 980 Блок оцінки каналу другу послідовність символів частотної ділянки 1012 Кодер 764 Відображають послідовність символів час1014 Перемежовувач тотної ділянки на піддіапазони, що використову1016 Блок відображення символу ються для передачі, і одержують третю послідов1020 Генератор пілот-сигналу ність символів 1022 Мультиплексор (МПЛ) 766 Перетворюють третю послідовність сим1024а, 1024b Блок множення волів у часову ділянку і одержують четверту пос1026 Підсумовувач лідовність символів, які виводяться 930а Модулятор SC-FDMA (для IFD MA) 768 Додають циклічний префікс до четвертої 1112 Блок повторення послідовності символів, які виводяться для одер1113 Пилкоподібний фазовий сигнал жання пілотного символу LFDMA 1116 Генератор циклічного префікса 770 Передають пілотний символ LFDMA у ча1122 N-точковеБПФ совій ділянці 1124 Блок відображення символу на піддіапа800 процес, що виконується приймачем для зон оцінки характеристики каналу зв'язку 1126 K-точкове ОШПФ 810 Видаляють циклічний префікс з прийнято1128 Генератор циклічного префікса го символу SC-FDMA 1212, 1312 Блок видалення циклічного префік812 Відміняють TDM або CDM, яка була викоса нана для пілот-сигналу 1214 Блок видалення пилоподібного фазового 814 Виконують K-точкове ШПФ для K прийнясигналу тих пілотних символів для одержання K значень 1220, 1320 Демультиплексор прийнятих пілот-сигналів 1224а, 1224b, 1324a, 1324b Блок множення 816 Зберігають значення прийнятих пілот1226а, 1226b, 1326a, 1326b Накопичувальний сигналів для N пілотних піддіапазонів і не врахопідсумовувач вують інші значення прийнятих пілот-сигналів 1230, 1330 Еквалайзер 818 Одержують оцінки посилення каналу для 1232 Накопичувальний підсумовувач N пілотних піддіапазонів, основуючись на N зна1314 K-точкове ШПФ ченнях прийнятих пілот-сигналів і використовуючи 1316 Блок оберненого відображення піддіап аметодику MMSE або LS зону на символ 1318 N-точкове ОШПФ 37 90133 38 39 90133 40 41 90133 42 43 90133 44 45 90133 46 47 90133 48 49 90133 50 51 Комп’ютерна в ерстка О. Гапоненко 90133 Підписне 52 Тираж 26 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюPilot-signal transmission and channel estimation for a frequency division multiplexing communication system
Автори англійськоюPalanki, Ravi, Khandekar, Aamod
Назва патенту російськоюПередача пилот-сигнала и оценка канала для системы связи, которая использует мультиплексирование с частотным разделением каналов
Автори російськоюПаланки Рави, Кхандекар Аамод
МПК / Мітки
МПК: H04B 1/69, H04L 27/26
Мітки: зв'язку, каналу, мультиплексування, системі, використовує, каналів, частотним, пілот-сигналу, оцінка, передача, розділенням, яка
Код посилання
<a href="https://ua.patents.su/26-90133-peredacha-pilot-signalu-ta-ocinka-kanalu-dlya-sistemi-zvyazku-yaka-vikoristovueh-multipleksuvannya-z-chastotnim-rozdilennyam-kanaliv.html" target="_blank" rel="follow" title="База патентів України">Передача пілот-сигналу та оцінка каналу для системи зв’язку, яка використовує мультиплексування з частотним розділенням каналів</a>
Способи та пристрої для передачі і прийому пілот-сигналу і даних з швидким стрибкоподібним перестроюванням частоти з мультиплексованим з кодовим розділенням пілот-сигналом у системі мдочр
Номер патенту: 88873
Опубліковано: 10.12.2009
Автори: Агравал Авніш, Тіг Едвард Харрісон
МПК: H04B 7/00, H04B 7/212
Мітки: мдочр, швидким, прийому, способи, пілот-сигналу, перестроюванням, частоти, пристрої, системі, кодовим, даних, стрибкоподібним, розділенням, мультиплексованим, передачі, пілот-сигналом
Формула / Реферат:
1. Спосіб передачі широкосмугового пілот-сигналу у системі безпровідного зв'язку з множинними несучими, який полягає у тому, що обробляють щонайменше один символ пілот-сигналу псевдовипадковим числовим (PN) кодом для одержання послідовності чіпів пілот-сигналу для широкосмугового пілот-сигналу, обробляють символи даних відповідно до схеми модуляції множинних несучих для одержання послідовності чіпів даних, мультиплексують з часовим...
Спосіб і пристрій (варіанти) передачі пілот-сигналу та спосіб і пристрій (варіанти) виконання оцінки каналу у безпровідній системі зв’язку
Номер патенту: 83705
Опубліковано: 11.08.2008
Автори: Кадоус Тамер, Агравал Авніш, Горе Дхананджай Ашок
МПК: H04L 25/02, H04B 7/06, H04L 27/26
Мітки: оцінки, безпровідній, зв'язку, варіанти, каналу, пристрій, системі, виконання, передачі, спосіб, пілот-сигналу
Формула / Реферат:
1. Спосіб передачі пілот-сигналу у безпровідній системі зв'язку з множиною антен, що містить етапи:генерують перший набір з Т масштабованих пілотних символів за допомогою першого вектора з Т коефіцієнтів, де Т - ціле число більше одиниці, і в якому перший набір масштабованих пілотних символів призначений для використання для оцінки каналу приймачами з однією антеною;вибірково генерують щонайменше Т-1 додаткових наборів з Т...
Калібрування каналу для комунікаційної системи з дуплексним зв’язком та часовим розділенням каналу
Номер патенту: 86191
Опубліковано: 10.04.2009
Автори: Кетчум Джон У., Говард Стівен Дж., Уоллейс Марк, Уолтон Родні Дж.
МПК: H04L 5/14, H04L 25/02
Мітки: часовим, дуплексним, каналу, комунікаційної, розділенням, калібрування, зв'язком, системі
Формула / Реферат:
1. Спосіб калібрування низхідного та висхідного каналів в безпровідній комунікаційній системі, яка включає в себе точку доступу, перший набір абонентів і другий набір абонентів, який містить етапи, на яких:одержують оцінки відкликів низхідних каналів для кожного з першого набору абонентів і другого набору абонентів;одержують оцінки відкликів висхідних каналів для кожного з першого набору абонентів і другого набору...
Спосіб створення допоміжного пілот-сигналу, спосіб його прийому і пристрій для його здійснення та спосіб індивідуальної передачі
Номер патенту: 63963
Опубліковано: 16.02.2004
Автори: Ландбі Стайн А., Оденвалдер Джозеф П., Тідеманн Едвард Г., мол.
МПК: H04B 1/707, H04B 7/26, H04J 11/00
Мітки: допоміжного, індивідуальної, спосіб, передачі, пілот-сигналу, пристрій, здійснення, створення, прийому
Формула / Реферат:
1. Спосіб створення допоміжного пілот-сигналу, який передбачає операції: прийому пілотних даних і покриття зазначених пілотних даних пілотною послідовністю Уолша, яку утворюють конкатенацією основної послідовності Уолша і її комплементарної послідовності.2. Спосіб за п. 1, який відрізняється тим, що зазначена основна послідовність Уолша є послідовністю нулів.3. Спосіб за п. 1, який відрізняється тим, що зазначена основна...
Керована передавачем система з множинним доступом з кодовим розділенням каналів, яка використовує багатокористувальницьке рознесення для максимізації пропускної здатності із забезпеченням рівноправного доступу
Номер патенту: 86759
Опубліковано: 25.05.2009
Автори: Це Девід Нгар Чінг, Блек Пітер Дж., Шапоньєр Етьєнн Франсуа, Бхушан Нага
МПК: H04W 28/00
Мітки: множинним, передавачем, рознесення, пропускної, багатокористувальницьке, система, максимізації, здатності, розділенням, забезпеченням, каналів, яка, рівноправного, кодовим, керована, використовує, доступу, доступом
Формула / Реферат:
1. Спосіб зв'язку між множиною користувачів та віддаленою передавальною станцією через множину ліній зв'язку в системі зв'язку, який полягає в тому, що призначають кожного користувача з множини користувачів щонайменше одній лінії зв'язку з множини ліній зв'язку; призначають метрику планування кожній лінії зв'язку з множини ліній зв'язку, причому метрика планування основана частково на співвідношенні якості лінії зв'язку і пропускної здатності...