Система підвісної дороги й установка для обробки зануренням з такою системою

Формула / Реферат
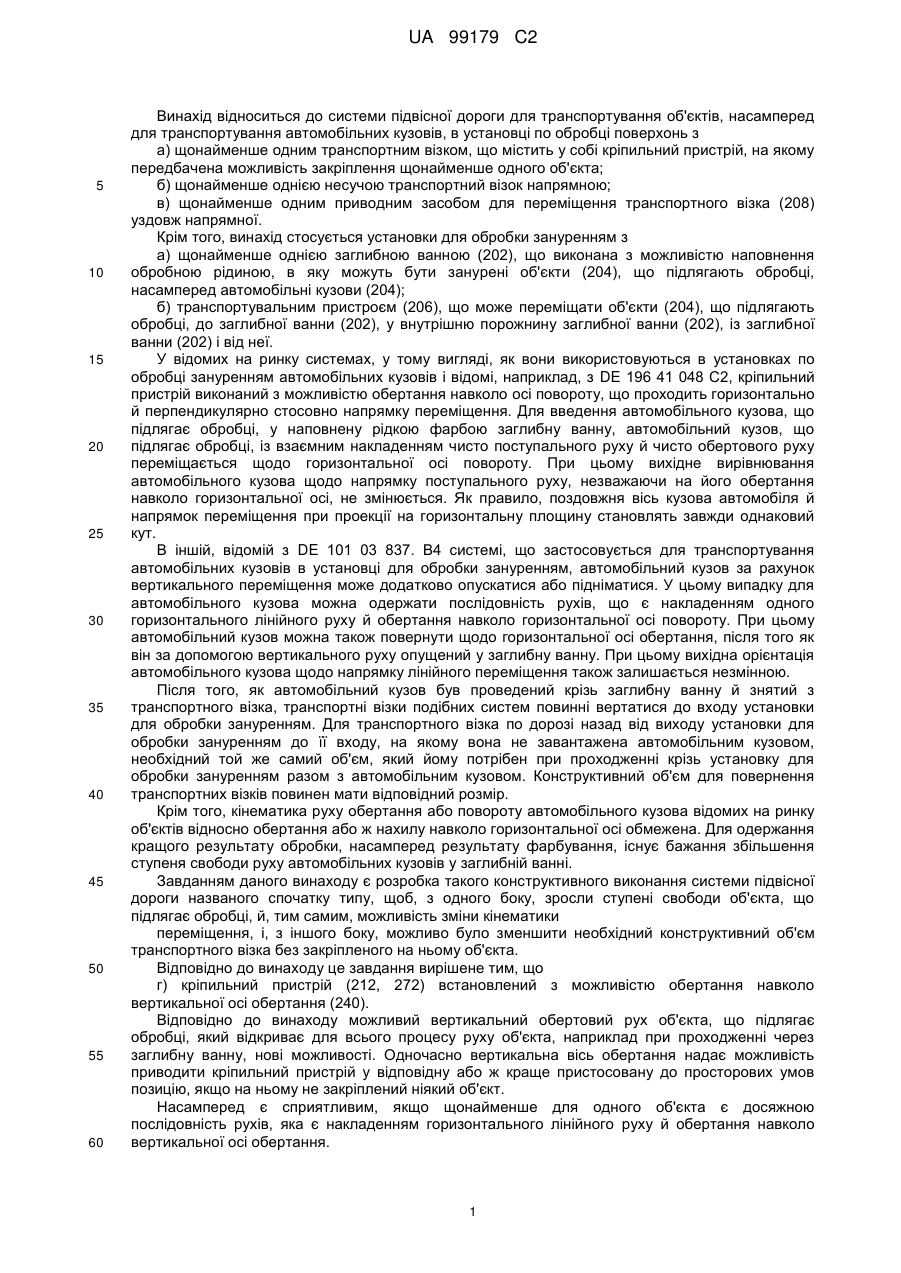
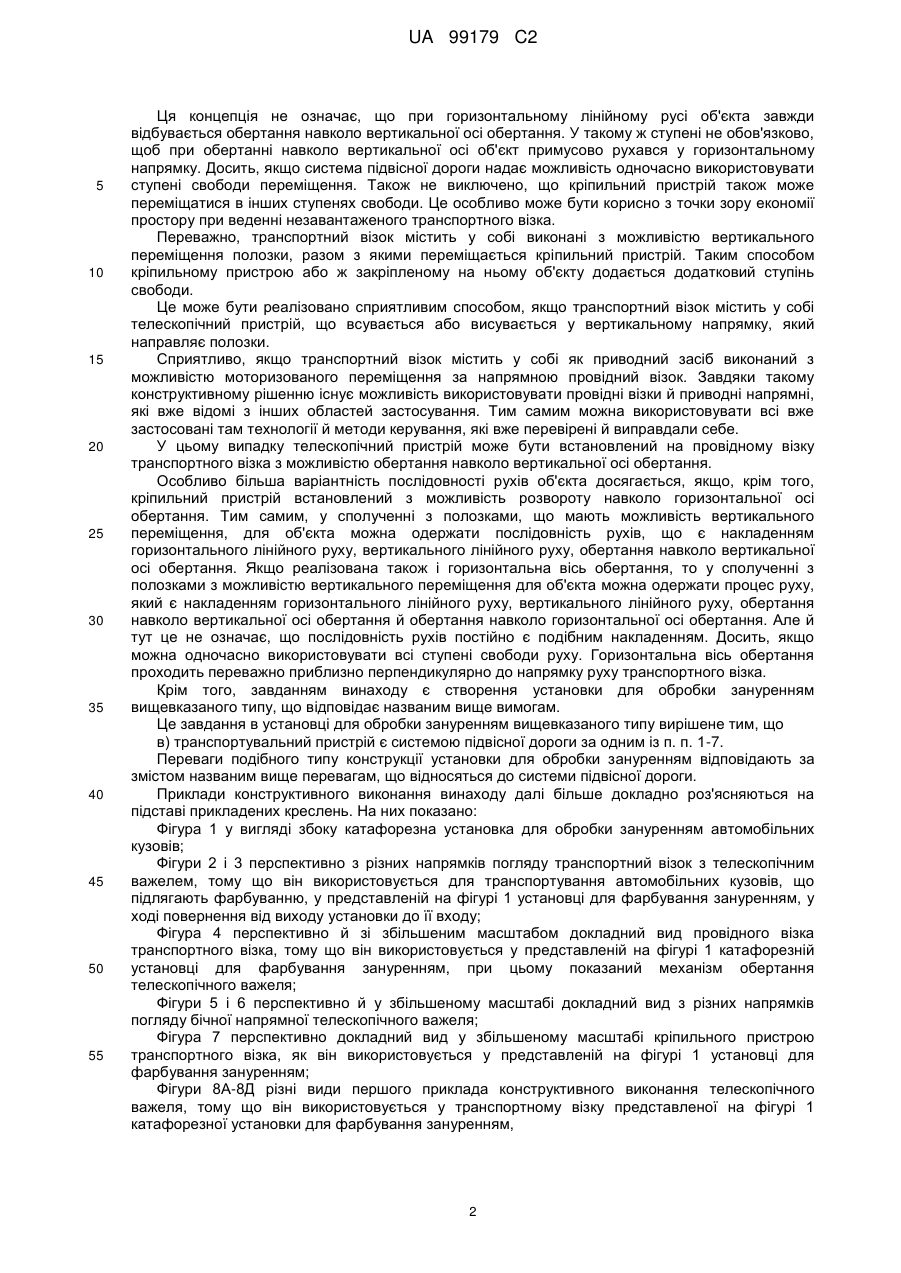
1. Система підвісної дороги для транспортування об'єктів, насамперед для транспортування автомобільних кузовів, в установці по обробці поверхонь з
а) щонайменше одним транспортним візком (208), що містить у собі кріпильний пристрій (212, 272), на якому передбачена можливість закріплення щонайменше одного об'єкта (204);
б) щонайменше однією несучою транспортний візок (208) напрямною (216);
в) щонайменше одним приводним засобом (222, 224) для переміщення транспортного візка (208) уздовж напрямної (216),
яка відрізняється тим, що
г) кріпильний пристрій (212, 272) встановлений з можливістю обертання навколо вертикальної осі обертання (240).
2. Система підвісної дороги за п. 1, яка виконана таким чином, що щонайменше для одного об'єкта (204) є досяжною послідовність рухів, яка є накладенням горизонтального лінійного руху й обертання навколо вертикальної осі обертання (240).
3. Система підвісної дороги за п. 1 або п. 2, яка відрізняється тим, що транспортний візок (208) містить у собі виконані з можливістю вертикального переміщення полозки (256), разом з якими переміщається кріпильний пристрій (212, 272).
4. Система підвісної дороги за п. 3, яка відрізняється тим, що транспортний візок (208) містить у собі телескопічний пристрій (214), що всувається або висувається у вертикальному напрямку, який направляє полозки (256).
5. Система підвісної дороги за одним із пп. 1-4, яка відрізняється тим, що транспортний візок (208) містить у собі як приводний засіб (210) виконаний з можливістю моторизованого переміщення за напрямною (216) провідний візок (210).
6. Система підвісної дороги за п. 5 з посиланням на п. 4, яка відрізняється тим, що телескопічний пристрій (214) встановлений з можливістю розвороту навколо вертикальної осі повороту (240) на провідному візку (210) транспортного візка (208).
7. Система підвісної дороги за одним із пп. 1-6, яка відрізняється тим, що кріпильний пристрій (212, 272), крім того, встановлений з можливістю розвороту навколо горизонтальної осі повороту (262).
8. Установка для обробки зануренням з
а) щонайменше однією заглибною ванною (202), що виконана з можливістю наповнення обробною рідиною, в яку можуть бути занурені об'єкти (204), що підлягають обробці, насамперед автомобільні кузови (204);
б) транспортувальним пристроєм (206), який може переміщати об'єкти (204), що підлягають обробці, до заглибної ванни (202), у внутрішню порожнину заглибної ванни (202), із заглибної ванни (202) і від неї,
яка відрізняється тим, що
в) транспортувальний пристрій (206) є системою (206) підвісної дороги за одним із пп. 1-7.
Текст
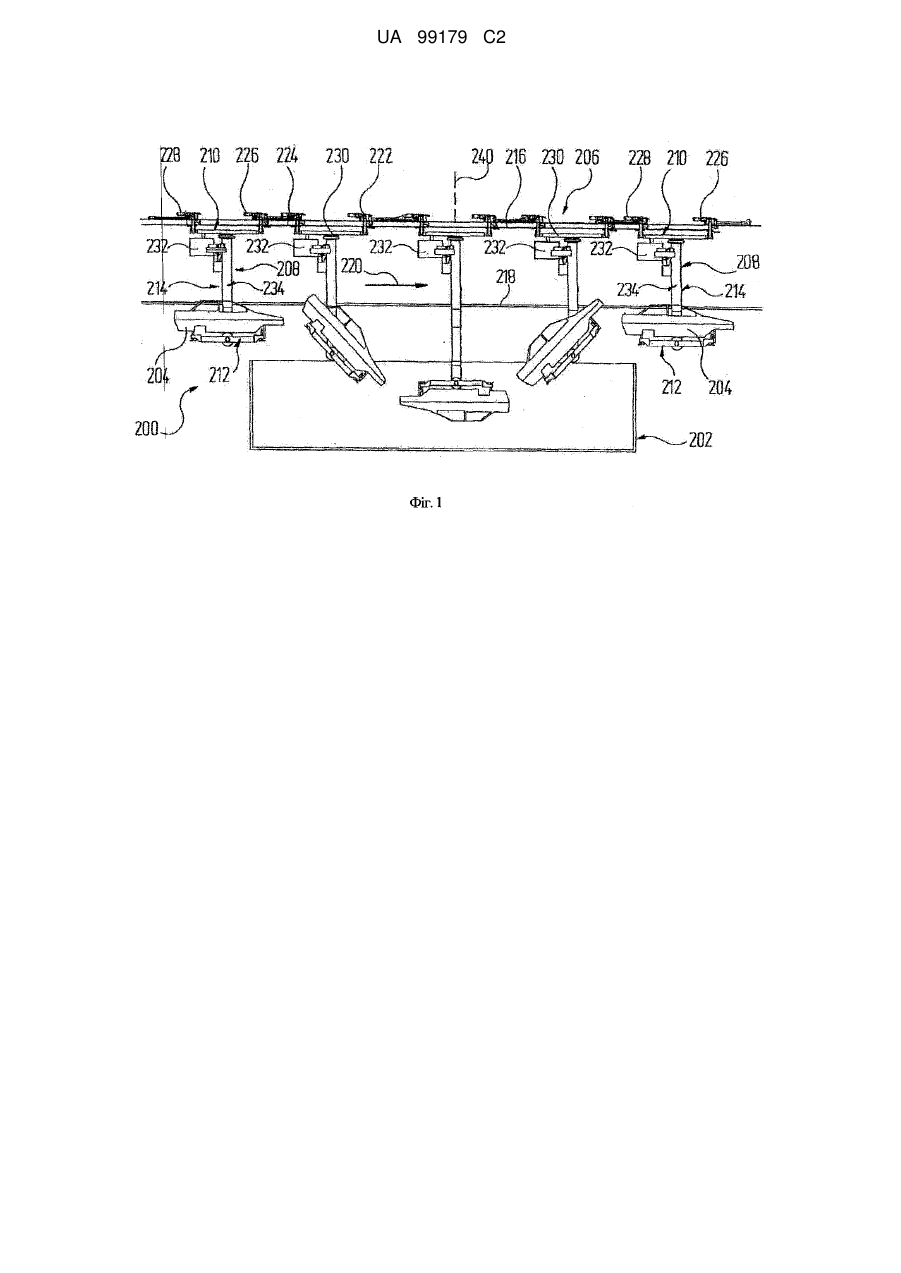
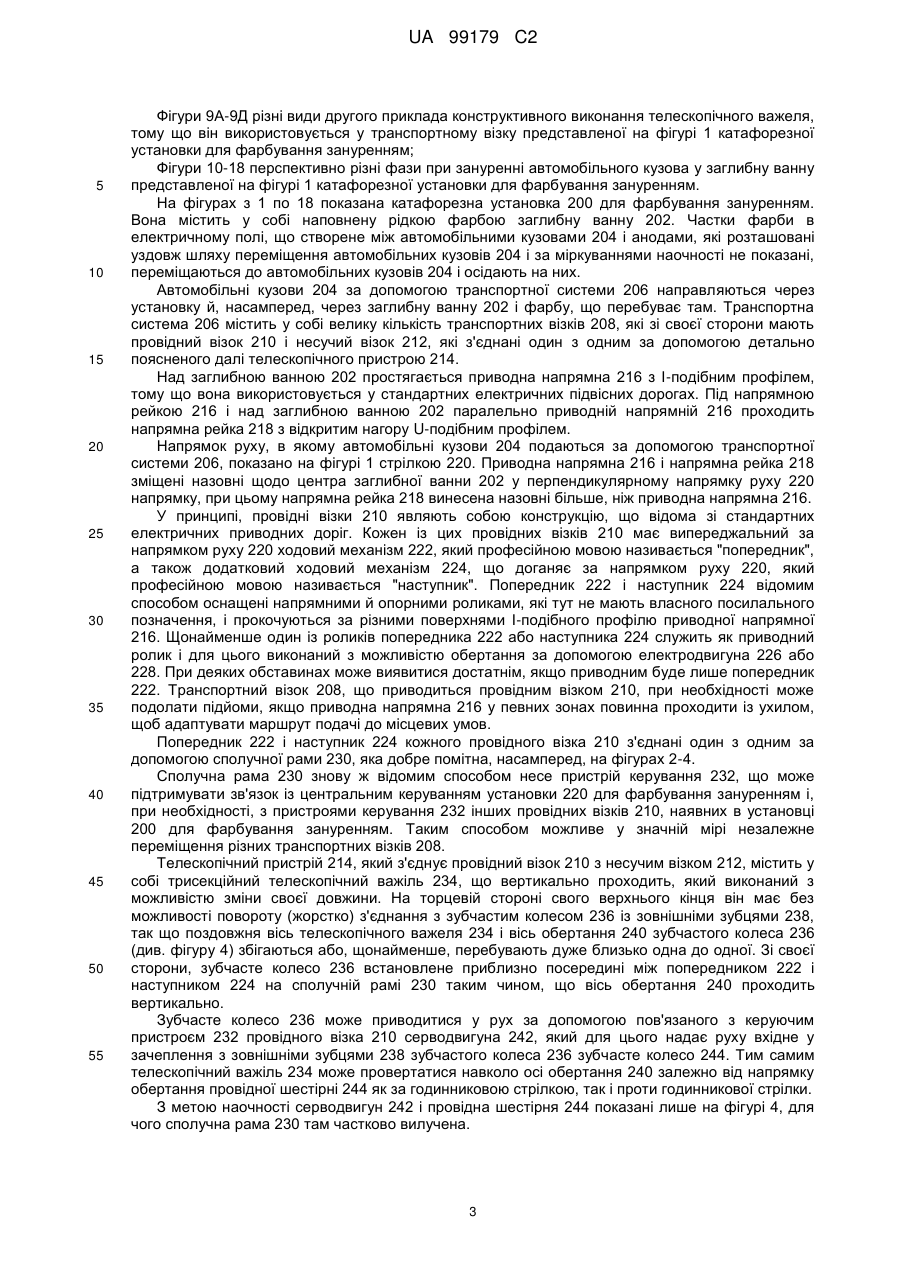
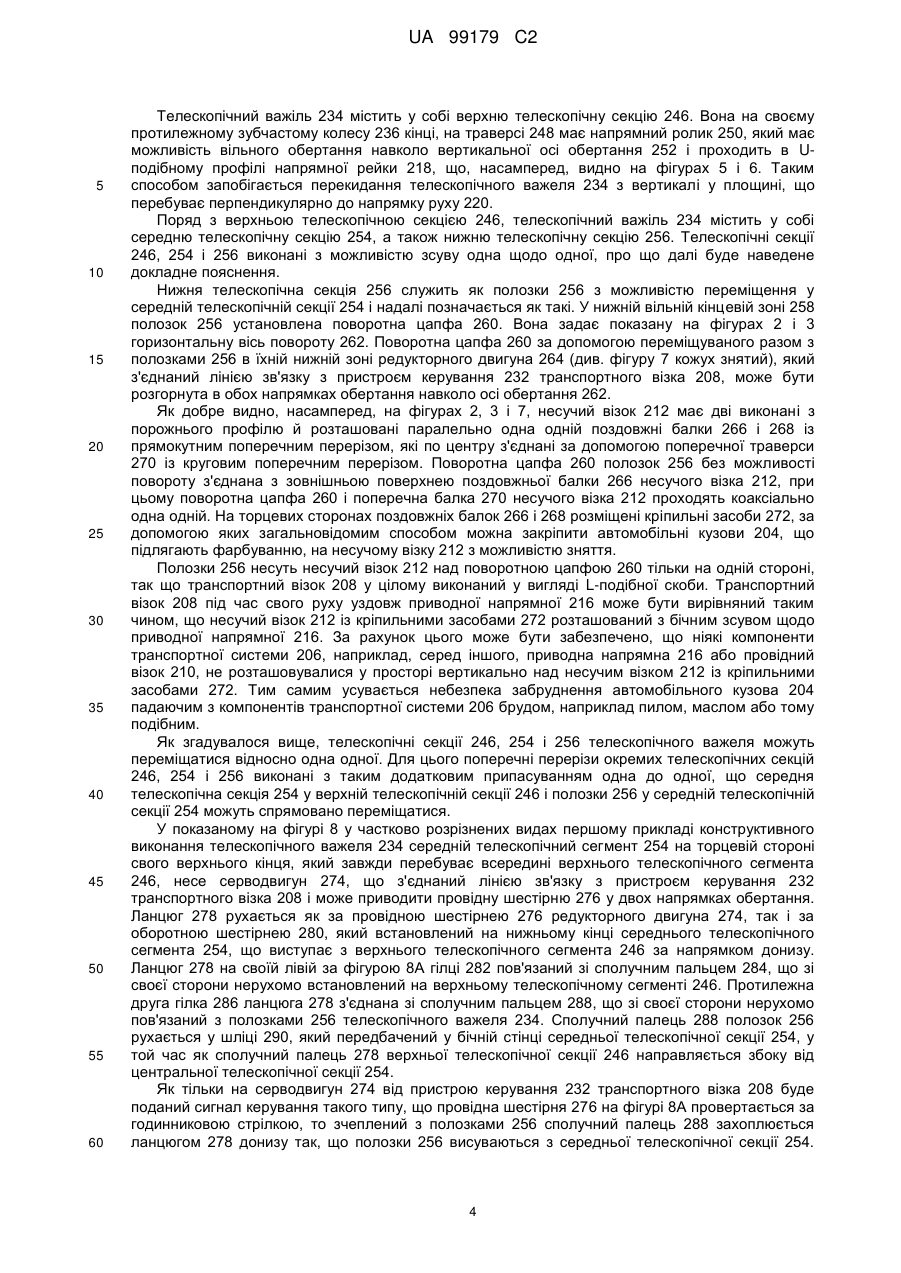
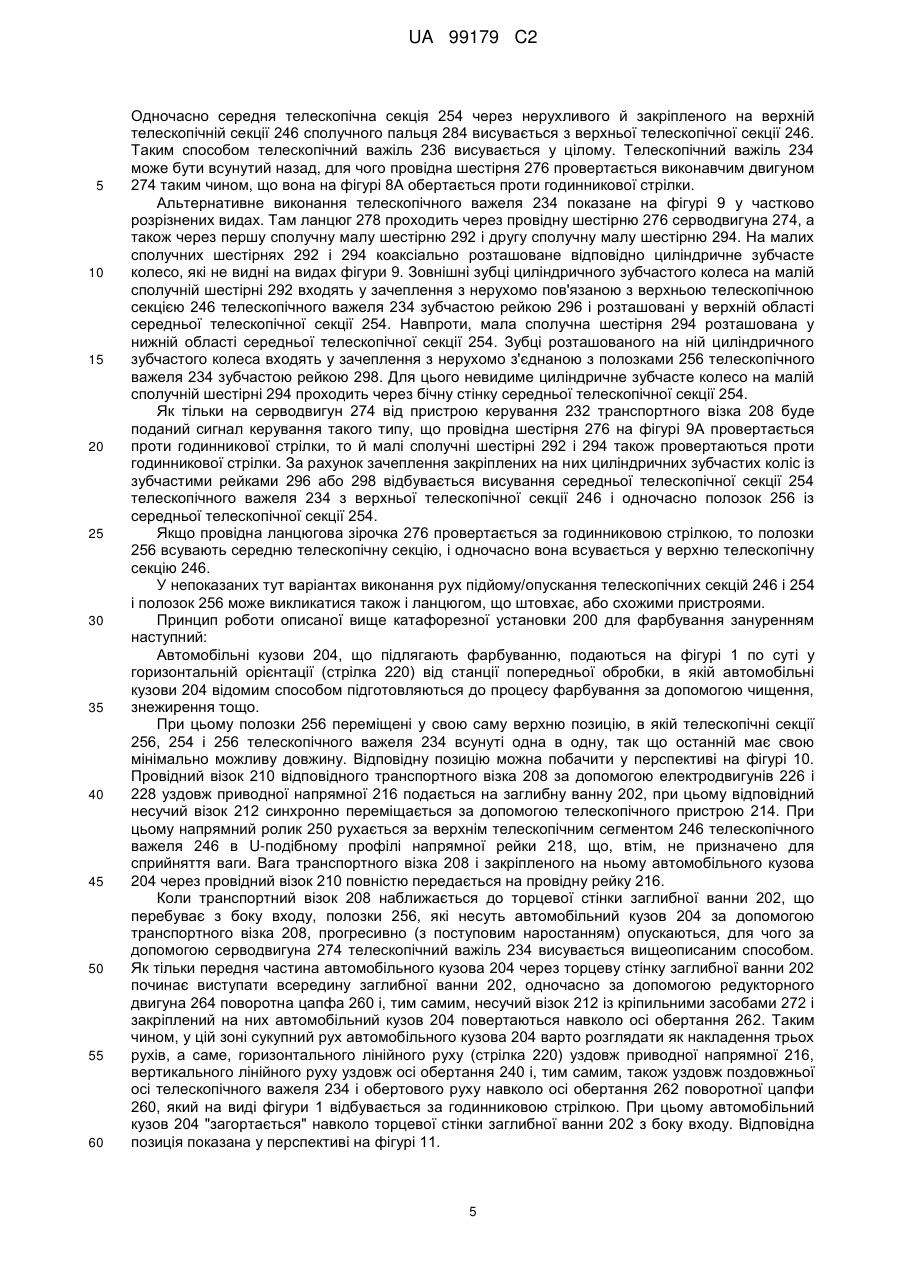
Реферат: Система підвісної дороги для транспортування об'єктів, насамперед для транспортування автомобільних кузовів, в установці по обробці поверхонь з щонайменше одним транспортним візком (208), що містить у собі кріпильний пристрій (212), на якому передбачена можливість закріплення щонайменше одного об'єкта (204). Транспортний візок (208) за допомогою приводного засобу (222, 224) є переміщуваним уздовж несучої його напрямної (216). Кріпильний пристрій (212) встановлений з можливістю обертання навколо вертикальної осі обертання (240). Крім того, описана установка для обробки зануренням із щонайменше однією заглибною ванною (202), що виконана з можливістю наповнення обробною рідиною, в яку можуть бути занурені об'єкти (204), що підлягають обробці. Вона містить у собі транспортувальний пристрій (206), який може переміщати об'єкти (204), що підлягають обробці, до заглибної ванни (202), у внутрішню порожнину заглибної ванни (202), із заглибної ванни (202) і від неї. UA 99179 C2 (12) UA 99179 C2 UA 99179 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід відноситься до системи підвісної дороги для транспортування об'єктів, насамперед для транспортування автомобільних кузовів, в установці по обробці поверхонь з а) щонайменше одним транспортним візком, що містить у собі кріпильний пристрій, на якому передбачена можливість закріплення щонайменше одного об'єкта; б) щонайменше однією несучою транспортний візок напрямною; в) щонайменше одним приводним засобом для переміщення транспортного візка (208) уздовж напрямної. Крім того, винахід стосується установки для обробки зануренням з а) щонайменше однією заглибною ванною (202), що виконана з можливістю наповнення обробною рідиною, в яку можуть бути занурені об'єкти (204), що підлягають обробці, насамперед автомобільні кузови (204); б) транспортувальним пристроєм (206), що може переміщати об'єкти (204), що підлягають обробці, до заглибної ванни (202), у внутрішню порожнину заглибної ванни (202), із заглибної ванни (202) і від неї. У відомих на ринку системах, у тому вигляді, як вони використовуються в установках по обробці зануренням автомобільних кузовів і відомі, наприклад, з DE 196 41 048 С2, кріпильний пристрій виконаний з можливістю обертання навколо осі повороту, що проходить горизонтально й перпендикулярно стосовно напрямку переміщення. Для введення автомобільного кузова, що підлягає обробці, у наповнену рідкою фарбою заглибну ванну, автомобільний кузов, що підлягає обробці, із взаємним накладенням чисто поступального руху й чисто обертового руху переміщається щодо горизонтальної осі повороту. При цьому вихідне вирівнювання автомобільного кузова щодо напрямку поступального руху, незважаючи на його обертання навколо горизонтальної осі, не змінюється. Як правило, поздовжня вісь кузова автомобіля й напрямок переміщення при проекції на горизонтальну площину становлять завжди однаковий кут. В іншій, відомій з DE 101 03 837. В4 системі, що застосовується для транспортування автомобільних кузовів в установці для обробки зануренням, автомобільний кузов за рахунок вертикального переміщення може додатково опускатися або підніматися. У цьому випадку для автомобільного кузова можна одержати послідовність рухів, що є накладенням одного горизонтального лінійного руху й обертання навколо горизонтальної осі повороту. При цьому автомобільний кузов можна також повернути щодо горизонтальної осі обертання, після того як він за допомогою вертикального руху опущений у заглибну ванну. При цьому вихідна орієнтація автомобільного кузова щодо напрямку лінійного переміщення також залишається незмінною. Після того, як автомобільний кузов був проведений крізь заглибну ванну й знятий з транспортного візка, транспортні візки подібних систем повинні вертатися до входу установки для обробки зануренням. Для транспортного візка по дорозі назад від виходу установки для обробки зануренням до її входу, на якому вона не завантажена автомобільним кузовом, необхідний той же самий об'єм, який йому потрібен при проходженні крізь установку для обробки зануренням разом з автомобільним кузовом. Конструктивний об'єм для повернення транспортних візків повинен мати відповідний розмір. Крім того, кінематика руху обертання або повороту автомобільного кузова відомих на ринку об'єктів відносно обертання або ж нахилу навколо горизонтальної осі обмежена. Для одержання кращого результату обробки, насамперед результату фарбування, існує бажання збільшення ступеня свободи руху автомобільних кузовів у заглибній ванні. Завданням даного винаходу є розробка такого конструктивного виконання системи підвісної дороги названого спочатку типу, щоб, з одного боку, зросли ступені свободи об'єкта, що підлягає обробці, й, тим самим, можливість зміни кінематики переміщення, і, з іншого боку, можливо було зменшити необхідний конструктивний об'єм транспортного візка без закріпленого на ньому об'єкта. Відповідно до винаходу це завдання вирішене тим, що г) кріпильний пристрій (212, 272) встановлений з можливістю обертання навколо вертикальної осі обертання (240). Відповідно до винаходу можливий вертикальний обертовий рух об'єкта, що підлягає обробці, який відкриває для всього процесу руху об'єкта, наприклад при проходженні через заглибну ванну, нові можливості. Одночасно вертикальна вісь обертання надає можливість приводити кріпильний пристрій у відповідну або ж краще пристосовану до просторових умов позицію, якщо на ньому не закріплений ніякий об'єкт. Насамперед є сприятливим, якщо щонайменше для одного об'єкта є досяжною послідовність рухів, яка є накладенням горизонтального лінійного руху й обертання навколо вертикальної осі обертання. 1 UA 99179 C2 5 10 15 20 25 30 35 40 45 50 55 Ця концепція не означає, що при горизонтальному лінійному русі об'єкта завжди відбувається обертання навколо вертикальної осі обертання. У такому ж ступені не обов'язково, щоб при обертанні навколо вертикальної осі об'єкт примусово рухався у горизонтальному напрямку. Досить, якщо система підвісної дороги надає можливість одночасно використовувати ступені свободи переміщення. Також не виключено, що кріпильний пристрій також може переміщатися в інших ступенях свободи. Це особливо може бути корисно з точки зору економії простору при веденні незавантаженого транспортного візка. Переважно, транспортний візок містить у собі виконані з можливістю вертикального переміщення полозки, разом з якими переміщається кріпильний пристрій. Таким способом кріпильному пристрою або ж закріпленому на ньому об'єкту додається додатковий ступінь свободи. Це може бути реалізовано сприятливим способом, якщо транспортний візок містить у собі телескопічний пристрій, що всувається або висувається у вертикальному напрямку, який направляє полозки. Сприятливо, якщо транспортний візок містить у собі як приводний засіб виконаний з можливістю моторизованого переміщення за напрямною провідний візок. Завдяки такому конструктивному рішенню існує можливість використовувати провідні візки й приводні напрямні, які вже відомі з інших областей застосування. Тим самим можна використовувати всі вже застосовані там технології й методи керування, які вже перевірені й виправдали себе. У цьому випадку телескопічний пристрій може бути встановлений на провідному візку транспортного візка з можливістю обертання навколо вертикальної осі обертання. Особливо більша варіантність послідовності рухів об'єкта досягається, якщо, крім того, кріпильний пристрій встановлений з можливість розвороту навколо горизонтальної осі обертання. Тим самим, у сполученні з полозками, що мають можливість вертикального переміщення, для об'єкта можна одержати послідовність рухів, що є накладенням горизонтального лінійного руху, вертикального лінійного руху, обертання навколо вертикальної осі обертання. Якщо реалізована також і горизонтальна вісь обертання, то у сполученні з полозками з можливістю вертикального переміщення для об'єкта можна одержати процес руху, який є накладенням горизонтального лінійного руху, вертикального лінійного руху, обертання навколо вертикальної осі обертання й обертання навколо горизонтальної осі обертання. Але й тут це не означає, що послідовність рухів постійно є подібним накладенням. Досить, якщо можна одночасно використовувати всі ступені свободи руху. Горизонтальна вісь обертання проходить переважно приблизно перпендикулярно до напрямку руху транспортного візка. Крім того, завданням винаходу є створення установки для обробки зануренням вищевказаного типу, що відповідає названим вище вимогам. Це завдання в установці для обробки зануренням вищевказаного типу вирішене тим, що в) транспортувальний пристрій є системою підвісної дороги за одним із п. п. 1-7. Переваги подібного типу конструкції установки для обробки зануренням відповідають за змістом названим вище перевагам, що відносяться до системи підвісної дороги. Приклади конструктивного виконання винаходу далі більше докладно роз'ясняються на підставі прикладених креслень. На них показано: Фігура 1 у вигляді збоку катафорезна установка для обробки зануренням автомобільних кузовів; Фігури 2 і 3 перспективно з різних напрямків погляду транспортний візок з телескопічним важелем, тому що він використовується для транспортування автомобільних кузовів, що підлягають фарбуванню, у представленій на фігурі 1 установці для фарбування зануренням, у ході повернення від виходу установки до її входу; Фігура 4 перспективно й зі збільшеним масштабом докладний вид провідного візка транспортного візка, тому що він використовується у представленій на фігурі 1 катафорезній установці для фарбування зануренням, при цьому показаний механізм обертання телескопічного важеля; Фігури 5 і 6 перспективно й у збільшеному масштабі докладний вид з різних напрямків погляду бічної напрямної телескопічного важеля; Фігура 7 перспективно докладний вид у збільшеному масштабі кріпильного пристрою транспортного візка, як він використовується у представленій на фігурі 1 установці для фарбування зануренням; Фігури 8А-8Д різні види першого приклада конструктивного виконання телескопічного важеля, тому що він використовується у транспортному візку представленої на фігурі 1 катафорезної установки для фарбування зануренням, 2 UA 99179 C2 5 10 15 20 25 30 35 40 45 50 55 Фігури 9А-9Д різні види другого приклада конструктивного виконання телескопічного важеля, тому що він використовується у транспортному візку представленої на фігурі 1 катафорезної установки для фарбування зануренням; Фігури 10-18 перспективно різні фази при зануренні автомобільного кузова у заглибну ванну представленої на фігурі 1 катафорезної установки для фарбування зануренням. На фігурах з 1 по 18 показана катафорезна установка 200 для фарбування зануренням. Вона містить у собі наповнену рідкою фарбою заглибну ванну 202. Частки фарби в електричному полі, що створене між автомобільними кузовами 204 і анодами, які розташовані уздовж шляху переміщення автомобільних кузовів 204 і за міркуваннями наочності не показані, переміщаються до автомобільних кузовів 204 і осідають на них. Автомобільні кузови 204 за допомогою транспортної системи 206 направляються через установку й, насамперед, через заглибну ванну 202 і фарбу, що перебуває там. Транспортна система 206 містить у собі велику кількість транспортних візків 208, які зі своєї сторони мають провідний візок 210 і несучий візок 212, які з'єднані один з одним за допомогою детально поясненого далі телескопічного пристрою 214. Над заглибною ванною 202 простягається приводна напрямна 216 з І-подібним профілем, тому що вона використовується у стандартних електричних підвісних дорогах. Під напрямною рейкою 216 і над заглибною ванною 202 паралельно приводній напрямній 216 проходить напрямна рейка 218 з відкритим нагору U-подібним профілем. Напрямок руху, в якому автомобільні кузови 204 подаються за допомогою транспортної системи 206, показано на фігурі 1 стрілкою 220. Приводна напрямна 216 і напрямна рейка 218 зміщені назовні щодо центра заглибної ванни 202 у перпендикулярному напрямку руху 220 напрямку, при цьому напрямна рейка 218 винесена назовні більше, ніж приводна напрямна 216. У принципі, провідні візки 210 являють собою конструкцію, що відома зі стандартних електричних приводних доріг. Кожен із цих провідних візків 210 має випереджальний за напрямком руху 220 ходовий механізм 222, який професійною мовою називається "попередник", а також додатковий ходовий механізм 224, що доганяє за напрямком руху 220, який професійною мовою називається "наступник". Попередник 222 і наступник 224 відомим способом оснащені напрямними й опорними роликами, які тут не мають власного посилального позначення, і прокочуються за різними поверхнями І-подібного профілю приводної напрямної 216. Щонайменше один із роликів попередника 222 або наступника 224 служить як приводний ролик і для цього виконаний з можливістю обертання за допомогою електродвигуна 226 або 228. При деяких обставинах може виявитися достатнім, якщо приводним буде лише попередник 222. Транспортний візок 208, що приводиться провідним візком 210, при необхідності може подолати підйоми, якщо приводна напрямна 216 у певних зонах повинна проходити із ухилом, щоб адаптувати маршрут подачі до місцевих умов. Попередник 222 і наступник 224 кожного провідного візка 210 з'єднані один з одним за допомогою сполучної рами 230, яка добре помітна, насамперед, на фігурах 2-4. Сполучна рама 230 знову ж відомим способом несе пристрій керування 232, що може підтримувати зв'язок із центральним керуванням установки 220 для фарбування зануренням і, при необхідності, з пристроями керування 232 інших провідних візків 210, наявних в установці 200 для фарбування зануренням. Таким способом можливе у значній мірі незалежне переміщення різних транспортних візків 208. Телескопічний пристрій 214, який з'єднує провідний візок 210 з несучим візком 212, містить у собі трисекційний телескопічний важіль 234, що вертикально проходить, який виконаний з можливістю зміни своєї довжини. На торцевій стороні свого верхнього кінця він має без можливості повороту (жорстко) з'єднання з зубчастим колесом 236 із зовнішніми зубцями 238, так що поздовжня вісь телескопічного важеля 234 і вісь обертання 240 зубчастого колеса 236 (див. фігуру 4) збігаються або, щонайменше, перебувають дуже близько одна до одної. Зі своєї сторони, зубчасте колесо 236 встановлене приблизно посередині між попередником 222 і наступником 224 на сполучній рамі 230 таким чином, що вісь обертання 240 проходить вертикально. Зубчасте колесо 236 може приводитися у рух за допомогою пов'язаного з керуючим пристроєм 232 провідного візка 210 серводвигуна 242, який для цього надає руху вхідне у зачеплення з зовнішніми зубцями 238 зубчастого колеса 236 зубчасте колесо 244. Тим самим телескопічний важіль 234 може провертатися навколо осі обертання 240 залежно від напрямку обертання провідної шестірні 244 як за годинниковою стрілкою, так і проти годинникової стрілки. З метою наочності серводвигун 242 і провідна шестірня 244 показані лише на фігурі 4, для чого сполучна рама 230 там частково вилучена. 3 UA 99179 C2 5 10 15 20 25 30 35 40 45 50 55 60 Телескопічний важіль 234 містить у собі верхню телескопічну секцію 246. Вона на своєму протилежному зубчастому колесу 236 кінці, на траверсі 248 має напрямний ролик 250, який має можливість вільного обертання навколо вертикальної осі обертання 252 і проходить в Uподібному профілі напрямної рейки 218, що, насамперед, видно на фігурах 5 і 6. Таким способом запобігається перекидання телескопічного важеля 234 з вертикалі у площині, що перебуває перпендикулярно до напрямку руху 220. Поряд з верхньою телескопічною секцією 246, телескопічний важіль 234 містить у собі середню телескопічну секцію 254, а також нижню телескопічну секцію 256. Телескопічні секції 246, 254 і 256 виконані з можливістю зсуву одна щодо одної, про що далі буде наведене докладне пояснення. Нижня телескопічна секція 256 служить як полозки 256 з можливістю переміщення у середній телескопічній секції 254 і надалі позначається як такі. У нижній вільній кінцевій зоні 258 полозок 256 установлена поворотна цапфа 260. Вона задає показану на фігурах 2 і 3 горизонтальну вісь повороту 262. Поворотна цапфа 260 за допомогою переміщуваного разом з полозками 256 в їхній нижній зоні редукторного двигуна 264 (див. фігуру 7 кожух знятий), який з'єднаний лінією зв'язку з пристроєм керування 232 транспортного візка 208, може бути розгорнута в обох напрямках обертання навколо осі обертання 262. Як добре видно, насамперед, на фігурах 2, 3 і 7, несучий візок 212 має дві виконані з порожнього профілю й розташовані паралельно одна одній поздовжні балки 266 і 268 із прямокутним поперечним перерізом, які по центру з'єднані за допомогою поперечної траверси 270 із круговим поперечним перерізом. Поворотна цапфа 260 полозок 256 без можливості повороту з'єднана з зовнішньою поверхнею поздовжньої балки 266 несучого візка 212, при цьому поворотна цапфа 260 і поперечна балка 270 несучого візка 212 проходять коаксіально одна одній. На торцевих сторонах поздовжніх балок 266 і 268 розміщені кріпильні засоби 272, за допомогою яких загальновідомим способом можна закріпити автомобільні кузови 204, що підлягають фарбуванню, на несучому візку 212 з можливістю зняття. Полозки 256 несуть несучий візок 212 над поворотною цапфою 260 тільки на одній стороні, так що транспортний візок 208 у цілому виконаний у вигляді L-подібної скоби. Транспортний візок 208 під час свого руху уздовж приводної напрямної 216 може бути вирівняний таким чином, що несучий візок 212 із кріпильними засобами 272 розташований з бічним зсувом щодо приводної напрямної 216. За рахунок цього може бути забезпечено, що ніякі компоненти транспортної системи 206, наприклад, серед іншого, приводна напрямна 216 або провідний візок 210, не розташовувалися у просторі вертикально над несучим візком 212 із кріпильними засобами 272. Тим самим усувається небезпека забруднення автомобільного кузова 204 падаючим з компонентів транспортної системи 206 брудом, наприклад пилом, маслом або тому подібним. Як згадувалося вище, телескопічні секції 246, 254 і 256 телескопічного важеля можуть переміщатися відносно одна одної. Для цього поперечні перерізи окремих телескопічних секцій 246, 254 і 256 виконані з таким додатковим припасуванням одна до одної, що середня телескопічна секція 254 у верхній телескопічній секції 246 і полозки 256 у середній телескопічній секції 254 можуть спрямовано переміщатися. У показаному на фігурі 8 у частково розрізнених видах першому прикладі конструктивного виконання телескопічного важеля 234 середній телескопічний сегмент 254 на торцевій стороні свого верхнього кінця, який завжди перебуває всередині верхнього телескопічного сегмента 246, несе серводвигун 274, що з'єднаний лінією зв'язку з пристроєм керування 232 транспортного візка 208 і може приводити провідну шестірню 276 у двох напрямках обертання. Ланцюг 278 рухається як за провідною шестірнею 276 редукторного двигуна 274, так і за оборотною шестірнею 280, який встановлений на нижньому кінці середнього телескопічного сегмента 254, що виступає з верхнього телескопічного сегмента 246 за напрямком донизу. Ланцюг 278 на своїй лівій за фігурою 8А гілці 282 пов'язаний зі сполучним пальцем 284, що зі своєї сторони нерухомо встановлений на верхньому телескопічному сегменті 246. Протилежна друга гілка 286 ланцюга 278 з'єднана зі сполучним пальцем 288, що зі своєї сторони нерухомо пов'язаний з полозками 256 телескопічного важеля 234. Сполучний палець 288 полозок 256 рухається у шліці 290, який передбачений у бічній стінці середньої телескопічної секції 254, у той час як сполучний палець 278 верхньої телескопічної секції 246 направляється збоку від центральної телескопічної секції 254. Як тільки на серводвигун 274 від пристрою керування 232 транспортного візка 208 буде поданий сигнал керування такого типу, що провідна шестірня 276 на фігурі 8А провертається за годинниковою стрілкою, то зчеплений з полозками 256 сполучний палець 288 захоплюється ланцюгом 278 донизу так, що полозки 256 висуваються з середньої телескопічної секції 254. 4 UA 99179 C2 5 10 15 20 25 30 35 40 45 50 55 60 Одночасно середня телескопічна секція 254 через нерухливого й закріпленого на верхній телескопічній секції 246 сполучного пальця 284 висувається з верхньої телескопічної секції 246. Таким способом телескопічний важіль 236 висувається у цілому. Телескопічний важіль 234 може бути всунутий назад, для чого провідна шестірня 276 провертається виконавчим двигуном 274 таким чином, що вона на фігурі 8А обертається проти годинникової стрілки. Альтернативне виконання телескопічного важеля 234 показане на фігурі 9 у частково розрізнених видах. Там ланцюг 278 проходить через провідну шестірню 276 серводвигуна 274, а також через першу сполучну малу шестірню 292 і другу сполучну малу шестірню 294. На малих сполучних шестірнях 292 і 294 коаксіально розташоване відповідно циліндричне зубчасте колесо, які не видні на видах фігури 9. Зовнішні зубці циліндричного зубчастого колеса на малій сполучній шестірні 292 входять у зачеплення з нерухомо пов'язаною з верхньою телескопічною секцією 246 телескопічного важеля 234 зубчастою рейкою 296 і розташовані у верхній області середньої телескопічної секції 254. Навпроти, мала сполучна шестірня 294 розташована у нижній області середньої телескопічної секції 254. Зубці розташованого на ній циліндричного зубчастого колеса входять у зачеплення з нерухомо з'єднаною з полозками 256 телескопічного важеля 234 зубчастою рейкою 298. Для цього невидиме циліндричне зубчасте колесо на малій сполучній шестірні 294 проходить через бічну стінку середньої телескопічної секції 254. Як тільки на серводвигун 274 від пристрою керування 232 транспортного візка 208 буде поданий сигнал керування такого типу, що провідна шестірня 276 на фігурі 9А провертається проти годинникової стрілки, то й малі сполучні шестірні 292 і 294 також провертаються проти годинникової стрілки. За рахунок зачеплення закріплених на них циліндричних зубчастих коліс із зубчастими рейками 296 або 298 відбувається висування середньої телескопічної секції 254 телескопічного важеля 234 з верхньої телескопічної секції 246 і одночасно полозок 256 із середньої телескопічної секції 254. Якщо провідна ланцюгова зірочка 276 провертається за годинниковою стрілкою, то полозки 256 всувають середню телескопічну секцію, і одночасно вона всувається у верхню телескопічну секцію 246. У непоказаних тут варіантах виконання рух підйому/опускання телескопічних секцій 246 і 254 і полозок 256 може викликатися також і ланцюгом, що штовхає, або схожими пристроями. Принцип роботи описаної вище катафорезної установки 200 для фарбування зануренням наступний: Автомобільні кузови 204, що підлягають фарбуванню, подаються на фігурі 1 по суті у горизонтальній орієнтації (стрілка 220) від станції попередньої обробки, в якій автомобільні кузови 204 відомим способом підготовляються до процесу фарбування за допомогою чищення, знежирення тощо. При цьому полозки 256 переміщені у свою саму верхню позицію, в якій телескопічні секції 256, 254 і 256 телескопічного важеля 234 всунуті одна в одну, так що останній має свою мінімально можливу довжину. Відповідну позицію можна побачити у перспективі на фігурі 10. Провідний візок 210 відповідного транспортного візка 208 за допомогою електродвигунів 226 і 228 уздовж приводної напрямної 216 подається на заглибну ванну 202, при цьому відповідний несучий візок 212 синхронно переміщається за допомогою телескопічного пристрою 214. При цьому напрямний ролик 250 рухається за верхнім телескопічним сегментом 246 телескопічного важеля 246 в U-подібному профілі напрямної рейки 218, що, втім, не призначено для сприйняття ваги. Вага транспортного візка 208 і закріпленого на ньому автомобільного кузова 204 через провідний візок 210 повністю передається на провідну рейку 216. Коли транспортний візок 208 наближається до торцевої стінки заглибної ванни 202, що перебуває з боку входу, полозки 256, які несуть автомобільний кузов 204 за допомогою транспортного візка 208, прогресивно (з поступовим наростанням) опускаються, для чого за допомогою серводвигуна 274 телескопічний важіль 234 висувається вищеописаним способом. Як тільки передня частина автомобільного кузова 204 через торцеву стінку заглибної ванни 202 починає виступати всередину заглибної ванни 202, одночасно за допомогою редукторного двигуна 264 поворотна цапфа 260 і, тим самим, несучий візок 212 із кріпильними засобами 272 і закріплений на них автомобільний кузов 204 повертаються навколо осі обертання 262. Таким чином, у цій зоні сукупний рух автомобільного кузова 204 варто розглядати як накладення трьох рухів, а саме, горизонтального лінійного руху (стрілка 220) уздовж приводної напрямної 216, вертикального лінійного руху уздовж осі обертання 240 і, тим самим, також уздовж поздовжньої осі телескопічного важеля 234 і обертового руху навколо осі обертання 262 поворотної цапфи 260, який на виді фігури 1 відбувається за годинниковою стрілкою. При цьому автомобільний кузов 204 "загортається" навколо торцевої стінки заглибної ванни 202 з боку входу. Відповідна позиція показана у перспективі на фігурі 11. 5 UA 99179 C2 5 10 15 20 25 30 35 40 45 50 55 60 При триваючому опусканні полозок 256 і триваючому обертанні автомобільного кузова 204 навколо осі обертання 262 поворотної цапфи 260 зрештою досягається позиція, в якій автомобільний кузов 204 розташований по суті вертикально, як це показано на фігурі 12. При цьому автомобільний кузов 204 усе ще перебуває відносно поблизу від торцевої стінки заглибної ванни 202 з боку входу. У міру того, як транспортний візок 208 рухається далі й, тим самим, відстань між центром автомобільного кузова 204 і торцевою стінкою заглибної ванни 202 з боку входу росте, поворотна цапфа 260, а з нею автомобільний кузов 204, провертаються далі за годинниковою стрілкою, так що автомобільний кузов 204 починає лежати на спині, як це показано на фігурі 13. Швидкість переміщення у горизонтальному напрямку й швидкість обертання можна погодити одну з одною так, що передня частина автомобільного кузова 204 при цьому русі занурення зберігає приблизно незмінну відстань від торцевої стінки заглибної ванни 202 з боку входу. Саме пізніше у момент, коли автомобільний кузов 204 повністю перебуває "на спині" і, тим самим, знову горизонтально і який показаний на фігурі 14, автомобільний кузов 204 повністю занурений у рідку фарбу. Потім автомобільний кузов 204 у цій позиції за допомогою транспортного візка 208 далі просувається через заглибну ванну 202, поки він не наблизиться до торцевої стінки заглибної ванни 202 з боку виходу. Потім починається процес виймання автомобільного кузова 204. Він також являє собою накладення трьох рухів, а саме, горизонтального лінійного руху у напрямку подачі 220, вертикального руху уздовж осі обертання 240 і, тим самим, також уздовж поздовжньої осі телескопічного важеля 234 і обертового руху навколо осі обертання 262 поворотної цапфи 260. Спочатку автомобільний кузов 204 за рахунок подальшого обертання поворотної цапфи 260 за годинниковою стрілкою розташовується вертикально, що показано на фігурах 15 і 16. Потім автомобільний кузов 204 при всуванні телескопічного важеля 234 і, тим самим, при русі вперед полозок 256 і продовженні обертового руху "загортається" над торцевою стінкою заглибної ванни 202 з боку виходу (див. фігуру 7), поки потім у напрямку подачі 220 знову не буде досягнута горизонтальна позиція свіжопофарбованого автомобільного кузова, яка показанана фігурі 18. Описана установка 200 для фарбування зануренням також може бути використана для фарбування зануренням невеликих об'єктів (невеликих деталей). Для цього можна закріпити не показані властиво несучі кошики на несучих візках 212, які містять не показані невеликі об'єкти, що підлягають фарбуванню, наприклад, розсипом. Само собою, що подібні несучі кошики не проводяться через заглибну ванну 202 у позиції, в якій їхній завантажувальний отвір спрямований донизу і об'єкти, що підлягають фарбуванню, можуть випасти. Як пояснено вище, телескопічний важіль 234 за допомогою серводвигуна 242 може повертатися навколо вертикальної осі обертання 240. При показаній на фігурах 1 і 10-18 кінематиці телескопічний важіль 234 щодо своєї вертикальної осі обертання 240 приймає положення, при якому поворотна цапфа 260 на полозках 256 орієнтована таким чином, що її горизонтальна вісь обертання 262 перебуває перпендикулярно напрямку руху 220. Телескопічний важіль 234 утримується у цьому положенні шляхом відповідного аретування серводвигуна 242. Можливість розвороту телескопічного важеля 234 навколо вертикальної осі обертання 240 при показаній на фігурах 1 і 10-18 кінематиці здобуває значення лише тоді, коли автомобільні кузови 204 покинули заглибну ванну 202 і зняті з транспортних візків 208 для подальшої обробки. Транспортні візки 208 потім потрібно знову повернути до входу установки 200 для фарбування зануренням, щоб там їх можна було знову завантажити автомобільними кузовами 204, що підлягають фарбуванню. Для цього несучий візок 212 повертається щодо сполучної рами 230 провідного візка 210 навколо вертикальної осі обертання 240 доти, поки поворотна цапфа 260 на полозках 256 не буде орієнтована паралельно напрямку руху 220, для чого серводвигун 242 приводиться у дію й за рахунок цього провертається зубчасте колесо 236 на верхній секції 246 телескопічного важеля 234. Крім того, несучий візок 212 шляхом відповідного обертання поворотної цапфи 260 за допомогою редукторного двигуна 264 приводиться у позицію, в якій її поздовжні балки 266 і 268 розташовані вертикально. Це положення показане на фігурах 2 і 3. На фігурі 10 видно транспортний візок 208, який у цьому "положенні повернення" на приводній напрямній 216', що проходить паралельно приводній напрямній 216 і який з'єднаний з нею невидимою криволінійною ділянкою, вертається до входу установки 200 для фарбування зануренням. Передача транспортного візка 208 від приводної напрямної 216 на приводну напрямну 216' також може відбуватися шляхом поперечного зсуву, без необхідності використання з'єднуючої приводні напрямні 216, 216' криволінійної ділянки. 6 UA 99179 C2 5 10 15 20 25 30 35 40 45 Завдяки повороту несучого візка 212 і її вертикального положення щодо провідного візка 210 зменшується необхідне місце для транспортного візка 208 по дорозі назад від виходу установки 200 для фарбування зануренням до її входу. Описана вище з посиланням на фігури 10-18 послідовність рухів автомобільного кузова 204 при проходженні крізь заглибну ванну 202 є лише приблизною. Конструктивне виконання транспортного візка 208 допускає велику кількість інших кінематик, які відповідно можна адаптувати до типу автомобільного кузова 3. Наприклад, автомобільний кузов 204 може проводитися "нагору дахом" крізь заглибну ванну 202. Як альтернатива можливо, що вісь обертання 262 несучого візка 212 проводиться практично над поверхнею технологічної рідини, що знаходиться у заглибній ванні 202. У цьому випадку автомобільний кузов проводиться через заглибну ванну 202 у положенні "дах нагору". При цьому можна домогтися, щоб ні несучий візок 212, ні полозки 256 не контактували з рідиною ванни, завдяки чому запобігається небезпека переносу технологічної рідини із однієї заглибної ванни у наступну заглибну ванну й попадання мастильних засобів у заглибні ванни. Наприклад, також можливо використовувати задану вертикальною віссю обертання 240 ступінь свободи, коли автомобільний кузов 204 проводиться крізь заглибну ванну 202. Так, автомобільний кузов 204 при відповідних габаритних розмірах заглибної ванни 202 може також проводиться через неї у поперечному, а не у поздовжньому напрямку, як це наочно відображено на фігурах 10-18. Телескопічний важіль 234 можна також повертати навколо осі обертання 240 доти, поки кут між поворотною цапфою 260 або її віссю обертання 262 з напрямком руху не складе від 0 до 90°. Також можна повертати телескопічний важіль 234 навколо вертикальної осі обертання 240 вперед та назад, у той час як автомобільний кузов 204 проводиться крізь заглибну ванну 202, за допомогою чого можна домогтися "виляння" автомобільного кузова 204 у заглибній ванні 202. Тим самим, для автомобільного кузова 204 можна домогтися такої послідовності рухів, яку можна представити як накладення чотирьох рухів, а саме, горизонтального лінійного руху (відповідно до напрямку руху 220), вертикального лінійного руху уздовж осі обертання 240 і, тим самим, уздовж поздовжньої осі телескопічного важеля 234, обертового руху навколо горизонтальної осі обертання 262 поворотної цапфи й обертового руху навколо вертикальної осі обертання телескопічного важеля 234. Виконана у вигляді системи підвісної дороги транспортна система 206 не вимагає ніяких додаткових споруджень праворуч і/або ліворуч від заглибної ванни 202, як вони необхідні у задуманих по-іншому установках. Завдяки цьому установка 200 для фарбування зануренням у цілому може бути відносно вузькою. Крім того, завдяки бічному підвішуванню несучого візка 212 не існує ніяких затінень автомобільного кузова 204 за рахунок інших деталей транспортного візка 208, які у заглибній ванні зажадали б витрат на компенсацію придатною кінематикою й/або збільшеним часом витримки у заглибній ванні. При проведенні автомобільного кузова 204 крізь заглибну ванну нижня кінцева область 258 полозок 256, які несуть горизонтальну поворотну цапфу 262, занурюється у рідину ванни. Завдяки цьому горизонтальна вісь обертання 260 може бути розміщена поблизу центра ваги закріпленого на несучому візку 212 автомобільного кузова 204. Це веде до більше сприятливого розподілу зусиль у послідовності рухів автомобільного кузова, ніж це відбувається у відомих системах, в яких вісь обертання розташована від центра ваги автомобільного кузова відносно далеко. ФОРМУЛА ВИНАХОДУ 50 55 1. Система підвісної дороги для транспортування об'єктів, насамперед для транспортування автомобільних кузовів, в установці по обробці поверхонь з а) щонайменше одним транспортним візком (208), що містить у собі кріпильний пристрій (212, 272), на якому передбачена можливість закріплення щонайменше одного об'єкта (204); б) щонайменше однією несучою транспортний візок (208) напрямною (216); в) щонайменше одним приводним засобом (222, 224) для переміщення транспортного візка (208) уздовж напрямної (216), яка відрізняється тим, що г) кріпильний пристрій (212, 272) встановлений з можливістю обертання навколо вертикальної осі обертання (240). 7 UA 99179 C2 5 10 15 20 25 2. Система підвісної дороги за п. 1, яка виконана таким чином, що щонайменше для одного об'єкта (204) є досяжною послідовність рухів, яка є накладенням горизонтального лінійного руху й обертання навколо вертикальної осі обертання (240). 3. Система підвісної дороги за п. 1 або п. 2, яка відрізняється тим, що транспортний візок (208) містить у собі виконані з можливістю вертикального переміщення полозки (256), разом з якими переміщається кріпильний пристрій (212, 272). 4. Система підвісної дороги за п. 3, яка відрізняється тим, що транспортний візок (208) містить у собі телескопічний пристрій (214), що всувається або висувається у вертикальному напрямку, який направляє полозки (256). 5. Система підвісної дороги за одним із пп. 1-4, яка відрізняється тим, що транспортний візок (208) містить у собі як приводний засіб (210) виконаний з можливістю моторизованого переміщення за напрямною (216) провідний візок (210). 6. Система підвісної дороги за п. 5 з посиланням на п. 4, яка відрізняється тим, що телескопічний пристрій (214) встановлений з можливістю розвороту навколо вертикальної осі повороту (240) на провідному візку (210) транспортного візка (208). 7. Система підвісної дороги за одним із пп. 1-6, яка відрізняється тим, що кріпильний пристрій (212, 272), крім того, встановлений з можливістю розвороту навколо горизонтальної осі повороту (262). 8. Установка для обробки зануренням з а) щонайменше однією заглибною ванною (202), що виконана з можливістю наповнення обробною рідиною, в яку можуть бути занурені об'єкти (204), що підлягають обробці, насамперед автомобільні кузови (204); б) транспортувальним пристроєм (206), який може переміщати об'єкти (204), що підлягають обробці, до заглибної ванни (202), у внутрішню порожнину заглибної ванни (202), із заглибної ванни (202) і від неї, яка відрізняється тим, що в) транспортувальний пристрій (206) є системою (206) підвісної дороги за одним із пп. 1-7. 8 UA 99179 C2 9 UA 99179 C2 10 UA 99179 C2 11 UA 99179 C2 12 UA 99179 C2 13 UA 99179 C2 14 UA 99179 C2 15 UA 99179 C2 16 UA 99179 C2 17 UA 99179 C2 18 UA 99179 C2 19 UA 99179 C2 20 UA 99179 C2 21 UA 99179 C2 22 UA 99179 C2 23 UA 99179 C2 Комп’ютерна верстка Л. Купенко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 24
ДивитисяДодаткова інформація
Назва патенту англійськоюOverhead conveyor system and immersion treatment plant with such system
Автори англійськоюRobbin, Jorh
Назва патенту російськоюСистема подвесной дороги и установка для обработки погружением с подобной системой
Автори російськоюРоббин Йорг
МПК / Мітки
МПК: B65G 49/00, B05C 3/00
Мітки: установка, системою, дороги, система, такою, підвісної, зануренням, обробки
Код посилання
<a href="https://ua.patents.su/26-99179-sistema-pidvisno-dorogi-jj-ustanovka-dlya-obrobki-zanurennyam-z-takoyu-sistemoyu.html" target="_blank" rel="follow" title="База патентів України">Система підвісної дороги й установка для обробки зануренням з такою системою</a>
Установка для обробки зануренням
Номер патенту: 99166
Опубліковано: 25.07.2012
Автори: Роббін Йорг, Ханф Йюрген, Еспіноса Антоніо Белісаріо Дуран, Гонсалес Вікто Уго Барраган, Альбек Себастіан
МПК: B65G 49/00
Мітки: обробки, установка, зануренням
Формула / Реферат:
1. Установка для обробки зануренням автомобільних кузовів за) щонайменше однією заглибною ванною (2; 102; 202), яка виконана з можливістю наповнення обробною рідиною, в яку можуть бути повністю занурені автомобільні кузови (3; 103; 204), які підлягають обробці;б) транспортною системою (4; 104; 206), яка може подавати автомобільні кузови (3; 103; 204), які підлягають обробці, до заглибної ванни (2; 102; 202), повністю у...
Транспортна балка для підвісної монорейкової дороги

Номер патенту: 36950
Опубліковано: 10.11.2008
Автори: Лукач Леонід Матвійович, Крюков Юрій Борисович, Приходько Володимир Вікторович, Азаркевич Анатолій Анатолійович, Філатов Юрій Васильович, Резніков Станіслав Юрійович
МПК: B61B 13/04
Мітки: підвісної, монорейкової, дороги, балка, транспортна
Формула / Реферат:
Транспортна балка для підвісної монорейкової дороги, що містить стінку та симетрично розташовані їздові полиці, яка відрізняється тим, що транспортна балка виконана у вигляді двотаврового прокатного профілю, при цьому ширина полиці двотаврового прокатного профілю, що утворює симетрично розташовані їздові полиці, становить 8,0-11,0 товщини стінки, середня товщина їздових полиць становить 2,0-2,4 товщини стінки, і їздові полиці виконані з...
Транспортна балка для підвісної монорейкової дороги

Номер патенту: 87419
Опубліковано: 10.07.2009
Автори: Лукач Леонід Матвійович, Резніков Станіслав Юрійович, Крюков Юрій Борисович, Філатов Юрій Васильович, Приходько Володимир Вікторович, Азаркевич Анатолій Анатолійович
МПК: B61B 13/04, E01B 25/00
Мітки: монорейкової, балка, дороги, підвісної, транспортна
Формула / Реферат:
Транспортна балка для підвісної монорейкової дороги, що містить стінку та симетрично розташовані їздові полиці, яка відрізняється тим, що транспортна балка виконана у вигляді двотаврового прокатного профілю, при цьому ширина полиці двотаврового прокатного профілю, що утворює симетрично розташовані їздові полиці, становить 8,0-11,0 товщини стінки, середня товщина їздових полиць становить 2,0-2,4 товщини стінки, і їздові полиці виконані з...
Візок підвісної монорейкової дороги

Номер патенту: 18871
Опубліковано: 25.12.1997
Автор: Рахманов Микола Миколайович
МПК: B60L 13/00, B61B 13/04
Мітки: монорейкової, підвісної, візок, дороги
Формула / Реферат:
Тележка подвесной монорельсовой дороги, снабженная установленными в ее корпусе индуктором асинхронного линейного двигателя, отличающаяся тем, что индуктор смонтирован на поворотной платформе, один конец которого шарнирно закреплен на вертикальной оси в корпусе тележки, а другой снабжен подпружиненными роликами, установленными с возможностью взаимодействия с боковыми поверхностями ходового пути.
Натяжний пристрій замкненого тягового канату підвісної дороги
Номер патенту: 6676
Опубліковано: 29.12.1994
Автори: Коротков Володимир Леонідович, Бабенко Олександр Васильович, Єненко Олександр Борисович
МПК: B61B 12/00
Мітки: канату, тягового, дороги, пристрій, замкненого, натяжний, підвісної
Формула / Реферат:
(57) Натяжное устройство замкнутого тягового каната подвесной дороги, содержащее установленные на несущей опоре две пары отклоняющих блоков, натяжные грузы с обводными блоками, гидроцилиндры, поршневые полости которых сообщены между собой посредством трубопровода, а также регулируемый дроссель, отличающееся тем, что каждый из натяжных грузов выполнен с упором, расположенным над соответствующим обводным блоком, а каждый из гидроцилиндров...