Спосіб і пристрій для керування функцією автоматичного зв’язку сусідів в бездротових мережах
Номер патенту: 103615
Опубліковано: 11.11.2013
Автори: Саглам Мустафа, Міттал Мукеш К., Патіл Суніл С., Тріпатхі Маніш, Катовіч Амер, Шевальє Крістоф, Діллс Джей Ф., Піка Франческо

Формула / Реферат
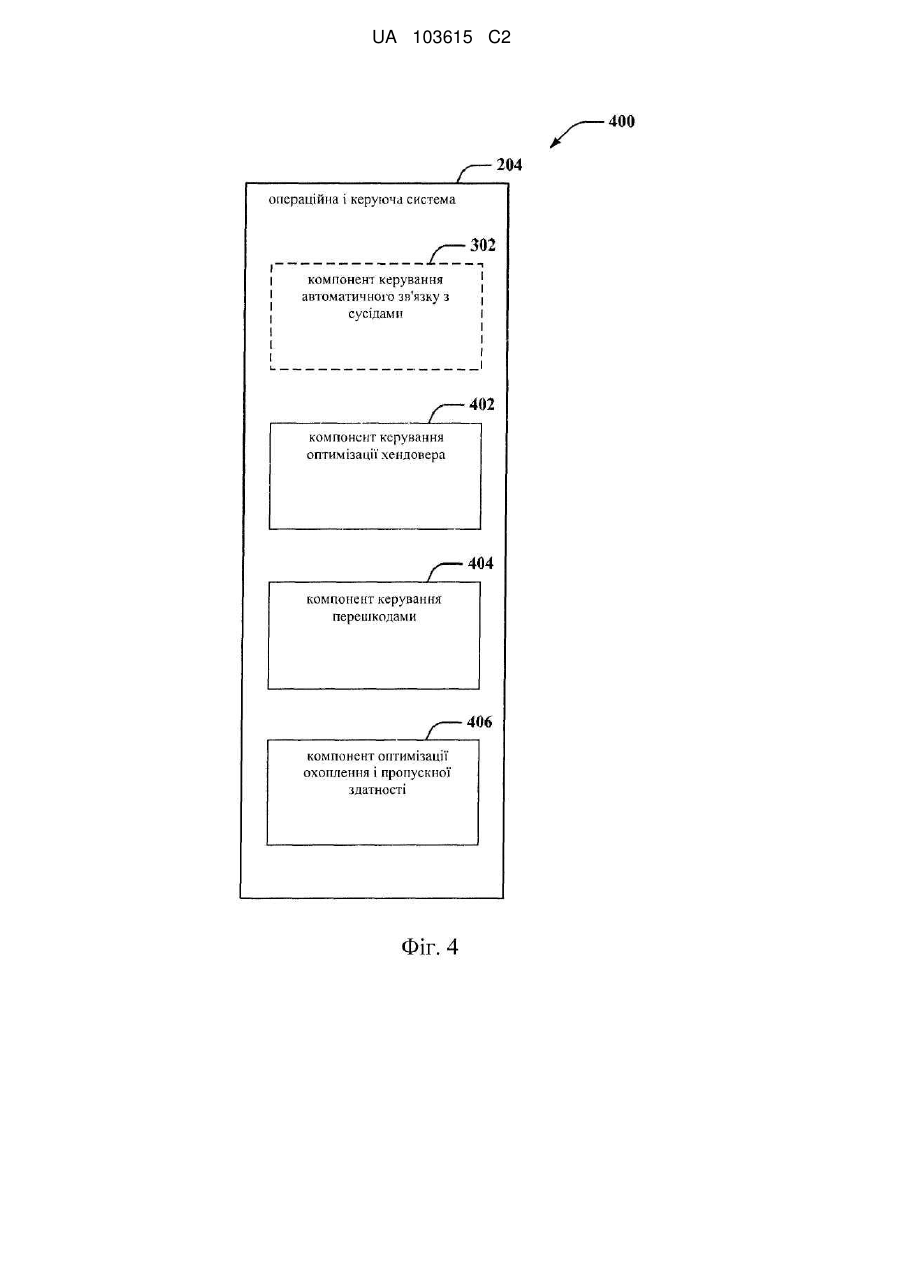
1. Пристрій, що діє в системі бездротового зв'язку, який містить: процесор, сконфігурований для
визначення будь-якого щонайменше одного доданого або усуненого зв'язку сусідів на основі, щонайменше частково, інформації, асоційованої з операційною і керуючою системою, і
відправлення одного або більше запитів на додавання або усунення з операційної і керуючої системи в базову станцію; і
пам'ять, з′єднану з процесором для збереження даних,
при цьому визначення основане на кількості разів, яку сусідній стільник повідомлявся або не повідомлявся у звіті про керування протягом фіксованого часового інтервалу.
2. Пристрій за п. 1, в якому запит на додавання або усунення використовується базовою станцією для щонайменше одного зі створеного зв'язку сусідів або модифікованого зв'язку сусідів, при цьому зв'язки сусідів підтримуються базовою станцією.
3. Пристрій за п. 1, в якому запит на додавання або усунення використовується базовою станцією для щонайменше однієї з таблиці створених зв'язків сусідів або таблиці модифікованих зв'язків сусідів, при цьому таблиця зв'язків сусідів підтримується базовою станцією.
4. Пристрій, що діє в системі бездротового зв'язку, який містить: процесор, сконфігурований для
визначення будь-якого щонайменше одного доданого або усуненого зв'язку сусідів на основі, щонайменше частково, інформації, асоційованої з операційною і керуючою системою, і
відправлення одного або більше запитів на додавання або усунення з операційної і керуючої системи в базову станцію;
відправлення на базову станцію запиту для заборони створення інтерфейсу Х2 в сусідній стільник або групу стільників; і
пам'ять, з'єднану з процесором для збереження даних.
5. Пристрій за п. 1, в якому процесор також сконфігурований для відправлення в базову станцію запиту для заборони хендоверів в сусідній стільник або групу стільників.
6. Пристрій за п. 1, в якому процесор також сконфігурований для прийому від базової станції оновлень відносно сусіднього стільника або групи стільників.
7. Пристрій за п. 1, в якому процесор також сконфігурований для одержання інформації про стан зв'язку сусідів, що підтримується базовою станцією.
8. Пристрій за п. 1, в якому процесор також сконфігурований для одержання інформації про стан зв'язку сусідів з таблиці зв'язків сусідів, що підтримується базовою станцією.
9. Пристрій за п. 1, в якому процесор також сконфігурований для відправлення одного або більше пріоритетів в базову станцію для створення інтерфейсу Х2 в сусідній стільник або групу стільників.
10. Машиночитаний носій, що містить:
код для визначення, додавати або усувати зв'язок сусідів на основі, щонайменше частково, інформації, асоційованої з операційною і керуючою системою;
код для відправлення з операційної і керуючої системи запиту на додавання або усунення в базову станцію;
при цьому визначення основане на кількості разів, яку сусідній стільник повідомлявся або не повідомлявся у звіті про керування протягом фіксованого часового інтервалу.
11. Машиночитаний носій, який містить код для:
визначення, додавати або усувати зв'язок сусідів на основі, щонайменше частково, інформації, асоційованої з операційною і керуючою системою;
відправлення з операційної і керуючої системи запиту на додавання або усунення в базову станцію; і
передачу запиту на заборону створення інтерфейсу Х2 в сусідній стільник або групу стільників.
12. Машиночитаний носій за п. 10, який також містить код для передачі запиту на заборону хендоверів в сусідній стільник або групу стільників.
13. Машиночитаний носій, який містить код для:
визначення, додавати або усувати зв'язок сусідів на основі, щонайменше частково, інформації, асоційованої з операційною і керуючою системою;
відправлення з операційної і керуючої системи запиту на додавання або усунення в базову станцію; і
передачу запиту для заборони усунення зв'язку з таблиці зв'язків сусідів, що підтримується базовою станцією.
14. Машиночитаний носій за п. 10. який також містить код для прийому оновлень від базової станції, при цьому оновлення стосуються сусіднього стільника.
15. Машиночитаний носій за п. 10, який також містить код для запиту з таблиці зв'язків сусідів, що підтримується базовою станцією, інформації про стан зв'язку сусідів.
16. Машиночитаний носій за п. 10, який також містить код для передачі інформації пріоритету для створення інтерфейсу Х2 в сусідній стільник.
Текст
Реферат: Описані системи і методики, які полегшують керування функціями автоматичного зв'язку сусідів в бездротових мережах. Система може включати в себе компоненти і/або пристрої, які встановлюють додавати чи ні, або усувати зв'язок сусідів на основі інформації, асоційованої з операційною і керуючою системами, при цьому операційна і керуюча системи відправляють запити на додавання або усунення в базову станцію, яка створює, оновлює і/або підтримує таблицю зв'язків сусідів і/або набір із зв'язків сусідів, яка включає в себе зв'язки сусідів між стільниками. UA 103615 C2 (12) UA 103615 C2 UA 103615 C2 5 10 15 20 25 30 35 40 45 50 55 60 По даній заявці домагається пріоритет по даті подачі попередньої заявки на патент США з серійним № 61/046,713, озаглавленої "METHOD AND APPARATUS FOR MANAGEMENT OF AUTOMATIC NEIGHBOR RELATION FUNCTION IN WIRELESS NETWORKS" ("СПОСІБ І ПРИСТРІЙ ДЛЯ КЕРУВАННЯ ФУНКЦІЄЮ АВТОМАТИЧНОГО ЗВ'ЯЗКУ СУСІДІВ В БЕЗДРОТОВИХ МЕРЕЖАХ"), яка була зареєстрована 21 квітня 2008 р. Також, по даній заявці домагається пріоритет по даті подачі попередньої заявки на патент США з серійним № 61/057,931, озаглавленої "METHOD AND APPARATUS FOR MANAGEMENT OF AUTOMATIC NEIGHBOR RELATION FUNCTION IN WIRELESS NETWORKS" ("СПОСІБ І ПРИСТРІЙ ДЛЯ КЕРУВАННЯ ФУНКЦІЄЮ АВТОМАТИЧНОГО ЗВ'ЯЗКУ СУСІДІВ В БЕЗДРОТОВИХ МЕРЕЖАХ"), яка була зареєстрована 2 червня 2008 р. Весь зміст вищезазначених заявок включений в матеріали даної заявки за допомогою посилання. I. Галузь техніки, до якої належить винахід Подальший опис стосується загалом бездротового зв’язку і, більш конкретно, розширення базовою функцією автоматичного зв'язку сусідів (ANR) в системі бездротового зв’язку. II. Рівень техніки винаходу Системи бездротового зв’язку широко використовуються, щоб надавати різні види зв'язку; наприклад, мовна і/або інформаційна може надаватися через подібні системи бездротового зв’язку. Типова система бездротового зв’язку, або мережа, може забезпечити доступ численних користувачів до одного або більше спільно використовуваних ресурсів (наприклад, ширина смуги пропускання, потужність передачі,. ..). Наприклад, система може використовувати різноманіття методик множинного доступу, таких як мультиплексування з частотним розділенням (FDM), мультиплексування з часовим розділенням (TDM), мультиплексування з кодовим розділенням (CDM), ортогональне мультиплексування з частотним розділенням (OFDM) і інші. Загалом, системи бездротового зв’язку з множинним доступом можуть одночасно підтримувати зв'язок для численних терміналів доступу. Кожний термінал доступу може взаємодіяти з однією або більше базовими станціями через передачі по прямій і зворотній лініях зв'язку. Пряма лінія зв'язку (або низхідна лінія зв'язку) стосується каналу зв'язку від базових станцій до терміналів доступу, і зворотна лінія зв'язку (або висхідна лінія зв'язку) стосується каналу зв'язку від терміналів доступу до базових станцій. Ця лінія зв'язку може бути створена через систему з єдиним входом і єдиним виходом, численними входами і єдиним виходом або з численними входами і численними виходами (MIMO). Системи MIMO загалом використовують численні (NT) передавальні антени і численні (NR) приймальні антени для передачі даних. Канал MIMO, утворений N T передавальними і NR приймальними антенами, може бути розкладений на NS незалежних каналів, які можуть згадуватися як просторові канали, де Ns≤min{NT, NR}. Кожний з NS незалежних каналів відповідає розмірності. Більше того, системи МIMO можуть надавати поліпшену продуктивність (наприклад, підвищену спектральну ефективність, більш високу пропускну здатність і/або більш високу надійність), якщо додаткова розмірність, створена численними передавальними і приймальними антенами, використовується. Системи MIMO можуть підтримувати різні методики дуплексної передачі для розділення прямої і зворотної ліній зв'язку по загальному фізичному середовищу. Наприклад, дуплексні системи з частотним розділенням (FDD) можуть використовувати непорівнянні частотні зони для прямої і зворотної ліній зв'язку. Крім того, в TDD-системах (дуплекс з часовим розділенням) пряма і зворотна лінії зв'язку можуть використовуватися загальну частотну зону так, щоб принцип взаємності дозволяв оцінку по каналу прямої лінії зв'язку з каналу зворотної лінії зв'язку. Системи бездротового зв’язку часто використовують одну або більше базових станцій, які надають зону обслуговування. Типова базова станція може передавати численні потоки даних для трансляції, послуги багатоадресної передачі і/або одноадресної передачі, при цьому потік даних може бути потоком даних, які можуть представляти незалежний інтерес при прийомі в термінал доступу. Термінал доступу в зоні обслуговування подібної базової станції може використовуватися для прийому одного, більше одного або всіх потоків передавальних даних комбінованими потоками. Аналогічно термінал доступу може передавати дані в базову станцію або інший термінал доступу. СУТЬ ВИНАХОДУ Подальший опис являє собою спрощену суть винаходу одного або більше варіантів його здійснення, для того щоб забезпечити базове розуміння подібних варіантів здійснення. Ця суть винаходу не є обширним оглядом всіх передбачуваних варіантів здійснення, і вона не має наміром ні ідентифікувати його ключові або критичні елементи всіх його варіантів здійснення, ні 1 UA 103615 C2 5 10 15 20 25 30 35 40 45 50 55 60 встановити межі об'єму яких-небудь або всіх його варіантів здійснення. Його єдина мета представити деякі поняття одного або більше варіантів здійснення в спрощеній формі як вступ в більш докладного опису, який представлений далі. Відповідно до одного аспекту, об'єктом винаходу є пристрій, що функціонує в системі бездротового зв’язку, яка конфігурується для визначення, додавати чи або усувати зв'язок сусідів на основі інформації, асоційованій з операційною і керуючою системою, і, отже, для відправлення запиту на додавання або усунення запиту з операційної і керуючої системи в базову станцію. Відповідно до додаткового аспекту заявленого предмета винаходу передбачається машиночитаний носій, який має машиновиконувані команди, що зберігаються на ньому, при цьому машиночитані команди встановлюють, чи додавати або усувати зв'язок сусідів на основі інформації, асоційованої з операційною і керуючою системою, і, отже, відправляти запити на додавання або усунення з операційної і керуючої системи в базову станцію. Відповідно до іншого аспекту, передбачений спосіб, що використовується в системах бездротового зв’язку, при цьому спосіб використовує порогове значення додавання сусідів або порогове значення усунення сусідів для керування функцією автоматичного зв'язку сусідів, і оновлює логічний зв'язок, що асоціюється з функцією автоматичного зв'язку сусідів, якій задано приймати рішення про додавання стільників або усунення стільників на основі, щонайменше частково, порогового значення додавання сусідів або порогового значення усунення сусідів, або оновлення логічного зв'язку, асоційованого з функцією автоматичного зв'язку, якій задано приймати рішення про додавання стільників або усунення стільників з таблиці зв'язків сусідів на основі, щонайменше частково, порогового значення додавання сусідів або порогового значення усунення сусідів. Згідно з ще одним аспектом, об'єктом винаходу є пристрій, який зберігає команди, пов'язані з підрахунком або зберіганням кількості разів, яку сусідній стільник звітується за допомогою термінала доступу в фіксованому інтервалі часу, виявляючи подію, де сусідній стільник звітується щонайменше фіксовану кількість разів, і, отже, створення зв'язку сусідів на основі того, чи звітував сусідній стільник щонайменше фіксовану кількість разів. Також і відповідно до іншого аспекту, пристрій, який зберігає команди, пов'язані з підрахунком або зберіганням кількості разів, яку сусідній стільник звітується з терміналом доступу в фіксованому часовому інтервалі, виявлення події, причому сусідній стільник звітується щонайменше фіксовану кількість разів, і, отже, створення зв'язку сусідів в таблиці зв'язку сусідів на основі виявленої події. Також, відповідно до іншого аспекту, пристрій, що функціонує в системі бездротового зв’язку, яка включає в себе засіб для підрахунку або зберігання кількості разів, яку сусідній стільник звітується з терміналом доступу в фіксованому часовому інтервалі, засіб для виявлення події, де сусідній стільник звітується щонайменше фіксовану кількість разів, в межах фіксованого часового інтервалу, засіб для створення зв'язку сусідів на основі, щонайменше частково, сусіднього стільника, який звітується щонайменше фіксовану кількість разів в межах фіксованого часового інтервалу; і засіб для створення зв'язку сусідів в наборі зі зв'язків сусідів на основі щонайменше частково, сусіднього стільника, що звітується щонайменше фіксовану кількість разів в межах фіксованого часового інтервалу. Для досягнення вищевикладених і пов'язаних цілей, один або більше варіантів здійснення включають ознаки, описані повністю надалі в даному документі і конкретно виділені в формулі винаходу. Подальший опис і прикладені кресленнядетально викладають певні ілюстративні аспекти одного або більше варіантів здійснення. Ці аспекти, проте, вказують тільки на деякі з різних способів, в яких можуть бути використані принципи різних варіантів здійснення і описані варіанти здійснення призначені, щоб включити в себе всі подібні аспекти і їх еквіваленти. КОРОТКИЙ ОПИС КРЕСЛЕНЬ Фіг.1 є ілюстрацією системи бездротового зв’язку згідно різними аспектам, викладеним в даному документі. Фіг.2 є ілюстрацією зразкової системи, яка виконує керування функціями автоматичного зв'язку сусідів в бездротових мережах. Фіг.3 є додатковою ілюстрацією зразкової системи, яка виконує керування функціями автоматичного зв'язку сусідів в середовищі бездротового зв’язку. Фіг.4 є іншою ілюстрацією зразкової системи, яка виконує керування функціями автоматичного зв'язку сусідів в бездротових мережах. Фіг.5-9 є ілюстраціями зразкових методик, які полегшують керування функціями автоматичного зв'язку сусідів в бездротових мережах. Фіг.10 є ілюстрацією зразкової таблиці зв'язків сусідів, як створеної, збереженої і що 2 UA 103615 C2 5 10 15 20 25 30 35 40 45 50 55 60 використовується заявленим предметом винаходу. Фіг.11 є ілюстрацією зразкової системи, яка полегшує виділення блоків ресурсів для термінала(ів) доступу через використання гнучкої схеми сигналізації в середовищі бездротового зв’язку. Фіг.12 є ілюстрацією зразкового середовища бездротової мережі, яка може використовуватися в зв'язку з різними системами і способами, описаними в даному документі. Фіг.13 є ілюстрацією зразкової системи, яка допускає використання гнучкої схеми для сигналізації призначень блоків ресурсів в середовищі бездротового зв’язку. ДОКЛАДНИЙ ОПИС Зараз описуються різні варіанти здійснення з посиланням на креслення, де у всіх з них однакові посилальні номери використані, щоб вказувати посиланням на однакові елементи по всьому документу. У подальшому описі, для цілей пояснення, багато які конкретні деталі викладені, щоб забезпечити повне розуміння одного або більше варіантів здійснення. Проте, може бути очевидно, що подібний варіант(и) здійснення може бути застосований на практиці без цих конкретних деталей. У інших випадках, в формі блок-схеми показані широко відомі структури і пристрої, щоб полегшити опис одного або більше варіантів здійснення. При використанні в даній заявці терміни "компонент", "модуль", "система" і т.п. означають пов'язану з комп'ютером об'єктну суть, або апаратні засоби, вбудоване програмне забезпечення, поєднання апаратних засобів і програмного забезпечення, програмне забезпечення, або програмне забезпечення в ході виконання. Наприклад, компонент може бути, але не обмежений цим, процесом, запущеним на процесорі, процесором, об'єктом, виконуваним файлом, потоком виконання, програмою і/або комп'ютером. За допомогою ілюстрації як додаток, що виконується на обчислювальному пристрої, так і обчислювальний пристрій може бути компонентом. Один або більше компонентів можуть постійно знаходитися в межах процесу і/або потоку виконання, і компонент може бути локалізованим на одному комп'ютері і/або розподілений між двома або більше комп'ютерами. У доповнення, ці компоненти можуть виконуватися з різних машиночитаних носіїв, що мають різні структури даних, збереженими на них. Компоненти можуть обмінюватися даними за допомогою локальних і/або віддалених процесів, наприклад, відповідно до сигналу, що має один або більше пакетів дані (наприклад, даних з одного компонента, взаємодіючого з іншим компонентом в локальній системі, розподіленій системі і/або по мережі, наприклад, по Інтернету з іншими системами за допомогою сигналу). Методики, описані в даному документі, можуть використовуватися для різних систем бездротового зв’язку, як множинний доступ з кодовим розділенням сигналів (CDMA), множинний доступ з часовим розділенням сигналів (TDMA), множинний доступ з частотним розділенням сигналів (FDMA), множинний доступ з ортогональним частотним розділенням сигналів (OFDMA), множинний доступ з частотним розділенням сигналів з єдиною несучою (SCFDMA) і інші системи. Терміни "система" і "мережа" часто використовуються взаємозамінно. Система CDMA може реалізовувати радіо технологію, наприклад, універсальний наземний радіодоступ (UTRA), CDMA2000 і т. д. UTRA включає в себе широкосмугову CDMA (W-CDMA)і інші варіанти CDMA. CDMA2000 охоплює стандарти IS-2000, IS-95 і IS-856. Система TDMA може реалізовувати радіо технологію, наприклад, глобальну систему мобільного зв'язку (GSM). Система OFDMA може реалізовувати радіотехнологію, наприклад виділений UTRA (E-UTRA), ультрамобільну широкосмугову передачу (UMB), IEEE 802.11 (Wi-Fi), IEEE 802.16 (WiMAX), IEEE 802.20, Flash-OFDM і т. д. UTRA і E-UTRA є частиною системи універсального мобільного зв'язку (UMTS). Довгостроковий розвиток (LTE) 3GPP є запланованим випуском UMTS, який використовує E-UTRA, який застосовує OFDMA по низхідній лінії зв'язку і SC-FDMA по висхідній лінії зв'язку. Множинний доступ з частотним розділенням сигналів з єдиною несучою (SC-FDMA) використовує модуляцію з єдиною несучою і корекцією частотної області. SC-FDMA має аналогічну продуктивність і, головним чином, ту ж саму загальну складність, як і в системі OFDMA. Сигнал SC-FDMA має більш низьке відношення пікового значення потужності до середнього (PAPR), через його внутрішню структуру з єдиною несучою. SC-FDMA може використовуватися, наприклад, у взаємодіях по висхідній лінії зв'язку, де більш низьке PAPR приносить значну вигоду для терміналів доступу в термінах ефективності потужності передачі. Відповідно, SC-FDMA може бути реалізований як схема множинного доступу висхідної лінії зв'язку в довгостроковому розвитку (LTE) 3GPP або виділеному UTRA. Крім того, різні варіанти здійснення описані в даному документі в зв'язку з терміналом доступу. Термінал доступу може також називатися системою, абонентським вузлом, абонентською станцією, мобільною станцією, мобільним телефоном, віддаленою станцією, віддаленим терміналом, мобільним пристроєм, абонентським терміналом, терміналом, 3 UA 103615 C2 5 10 15 20 25 30 35 40 45 50 55 60 пристроєм бездротового зв’язку, агентом користувача, абонентським пристроєм або абонентським обладнанням (UE). Термінал доступу може бути стільниковим телефоном, бездротовим телефоном, телефоном протоколу ініціації сеансу (SIP), станцією бездротової абонентської лінії (WLL), персональним цифровим помічником (PDA), кишеньковим пристроєм, який має можливість бездротового з'єднання, обчислювальним пристроєм або іншим обробним пристроєм, сполученим з бездротовим модемом. Крім того, різні варіанти здійснення описані в даному документі в зв'язку з базовою станцією. Базова станція може використовуватися для зв'язку з терміналом(ами) доступу і може також згадуватися як точка доступу, вузол В, виділений вузол В (eNodeB) або яка-небудь інша термінологія. Більше того, різні аспекти або ознаки, описані в даному документі, можуть бути реалізовані як спосіб, пристрій або виріб, що використовує методики стандартного програмування і/або конструювання. Термін "виріб", як використовується в матеріалах даної заявки, має наміром охоплювати комп'ютерну програму, доступну з будь-якого машиночитаного пристрою, несучої або носіїв. Наприклад, машиночитане середовище може включати в себе, але не як обмеження, магнітні запам'ятовуючі пристрої (наприклад, жорсткий диск, дискету, магнітні смуги і т. д.), оптичні диски (наприклад, компакт диск (CD), цифровий універсальний диск (DVD) і т. д.), інтелектуальні карти, і пристрої флеш-пам'яті (наприклад, EPROM, картку, карту пам'яті, основний накопичувач і т. д.). Крім того, різні запам'ятовуючі носії, описані в даному документі, можуть являти собою один або більше пристроїв і/або інші машиночитані носії для зберігання інформації. Термін "машиночитаний носій" може включати в себе без обмеження бездротові канали і інші різні носії, що допускають зберігання, вміст і/або передачу команди(команд) і/або даних. Функція автоматичного зв'язку сусідів (ANR) передбачає автоматичне керування зв'язками сусідів між стільниками. У базовому формулюванні функції ANR входи в цю функцію є типовими вимірюваннями абонентського обладнання (UE) виявлених стільників і додатково і/або альтернативно іншу інформацію, внутрішнім способом базовою станцією, що створюється, виділеним вузлом В (eNodeB), точкою доступу, або вузлом В (наприклад, вимірювання продуктивності і т. д.) можуть також використовуватися як вхід в функцію ANR. Загалом вихід функції ANR є типово набором із зв'язків з сусідами. Функція ANR може організувати зв'язки сусідів в таблицю (наприклад, таблиця зв'язків сусідів). Базова функція ANR типово формує об'єкт таблиці зв'язку сусідів для обмежень, що надаються операційною і керуючою системою, яка також може створювати нові зв'язки сусідів. Більше того, базова функція ANR може відправляти зворотний зв'язок в OAM про зміни в існуючих зв'язках сусідів або про недавно створені зв'язки сусідів. Цей зворотний зв'язок може бути в формі звіту про зв'язок сусідів (N R). Проте, вищевикладені функціональні можливості можуть мати дві головних області, які можуть бути предметом для поліпшення. По-перше, критерії для створення новою і/або усунення існуючого зв'язку сусідів за допомогою функції ANR, в даний момент на визначені (наприклад, це може бути визначеним для розробника і/або варіанту реалізації), які можуть бути і причиною несумісної поведінки для функцій ANR, реалізованих за допомогою інших розробників, і оператори, які придбавають базові станції, вузли В, виділені вузли В (eNodeB), або точками доступу з численних розробників можуть мати складності досягнення сумісної поведінки функції ANR в їх мережах. Зокрема, кількість звітів про абонентське обладнання стільника А, прийнятого функцією автоматичного зв'язку сусідів з стільника В, який ініціює доповнення зв'язку (В А) сусідів є патентованою. Наприклад, в першому розробникові може бути реалізація, де кількість звітів про вимірювання, що містять стільник А, необхідний для додавання зв'язку (В А) сусідів до таблиці зв'язку сусідів з стільника В, бути встановлена до m (наприклад, перше ціле число), тоді як реалізація другого розробника може встановити кількість звіту про вимірювання, що містить стільник А, необхідний для додавання аналогічного зв'язку сусідів до таблиці зв'язків сусідів з стільника В в n (наприклад, друге ціле число). Через запатентовану природу доповнення і/або критерії усунення, m може не дорівнювати n. Відповідно, для вказаного накладання дальності радіозв'язку між стільником А і стільником В, реалізація першого розробника може мати введення в таблицю зв'язків сусідів з стільника В, відмічаючи зв'язок сусідів (В А), тоді як реалізація другого розробника може не мати цього введення в релевантну таблицю зв'язку сусідів. У результаті, накладення охоплення між двома сусідніми стільниками, необхідне для ініціювання хендоверів між стільниками, стає залежним від розробника, і оператори, які купують базові станції, точки доступу, eNodeB і т. д., від численних розробників, можуть мати складності, досягаючи сумісної поведінки з функції автоматичного зв'язку сусідів в їх мережі бездротового зв’язку, з одного боку, і розробляючи сумісну і ефективну схему мережі, задавання розмірності мережі, і рекомендації по оптимізації мережі і процедури, застосовні за допомогою рішень різних розробників - базової станції, точок 4 UA 103615 C2 5 10 15 20 25 30 35 40 45 50 55 60 доступу, NodeB, eNodeB і т. д., з іншого боку. Аналогічно, умови для усунення зв'язку сусідів з таблиці зв'язку сусідів за допомогою функції автоматичного зв'язку сусідів можуть бути запатентовані. По-друге, OAM типово є характерно інформованою про дії функції ANR, але загалом не має доступу до вимірювань абонентського обладнання (UE) виявлених стільників. Вимірювання абонентського обладнання (UE) типово містять значну інформацію, яку OAM може використовувати для оновлення обмежень по функції ANR і для інших функціональних можливостей, таких як керування перешкодами і оптимізація охоплення і пропускної здатності. Для того, щоб звернутися до цих двох визначених областей, заявлений предмет винаходу розширює поточну базову функцію ANR в більш ретельно розроблену структуру для керування функцією ANR. Для того, щоб передбачити краще керування функцією ANR і кращу сумісність між варіантами здійснення розробників заявлений предмет винаходу передбачає порогові значення додавання до сусідів (NA) і/або усунення сусідів (NR). Ці порогові значення можуть дозволяти створення нових або усунення існуючих зв'язків сусідів за допомогою функції ANR. Типово, порогові значення можуть конфігуруватися в OAM і відсилатися в функцію ANR, розташовану в базовій станції, вузлі В, виділеному вузлі В (eNodeB) або точці доступу. Більше того, заявлений предмет винаходу може дозволяти OAM приймати або одержувати звіти про вимірювання абонентського обладнання (UE) про виявлені стільники з функції ANR у вигляді звітів про виявлення сусідів (ND), і додатково предмет винаходу передбачає критерії для передачі звітів про виявлення сусідів (ND) в OAM. Роблячи вищевикладене, заявлений предмет винаходу допускає для OAM переважно оновлювати обмеження по функції ANR і/або використовувати звіти про виявлення сусідів для додаткових цілей. Посилаючись тепер на фіг. 1, проілюстрована система 100 бездротового зв’язку згідно з різними варіантами здійснення, представленими в даному документі. Система 100 містить базову станцію 102, яка може включати в себе численні групи антен. Наприклад, одна група антен може включати в себе антени 104 і 106, інша група може містити антени 108 і 110, і додаткова група може включати в себе антени 112 і 114. Дві антени проілюстровані для кожної групи антен; проте більше або менше антен можуть використовуватися для кожної групи. Базова станція 102 може додатково включати в себе ланцюжок передавачів і ланцюжок приймачів, кожний з яких, в свою чергу, може містити множину компонентів, що асоціюються з передачею і прийомом сигналів (наприклад, процесори, модулятори, мультиплексори, демодулятори, демультиплексори, антени і т. д.), як буде братися до уваги фахівцем в даній галузі техніки. Базова станція 102 може взаємодіяти з одним або більше терміналами доступу, наприклад, терміналом 116 доступу і терміналом 122 доступу; проте, необхідно брати до уваги, що базова станція 102 може взаємодіяти з, головним чином, будь-якою кількістю терміналів доступу, аналогічних терміналам 116 і 122 доступу. Термінали 116 і 122 доступу можуть, наприклад, бути стільниковими телефонами, смартфонами, портативними комп'ютерами, кишеньковими пристроями зв'язку, кишеньковими обчислювальними пристроями, супутниковим радіо, системами глобального позиціонування, персональними цифровими помічниками (PDA) і/або будь-яким іншим відповідним пристроєм для зв'язку за системою 100 бездротового зв’язку. Як відображено, термінал 116 доступу знаходиться у взаємодії з антенами 112 і 114, антени 112 і 114 передають інформацію в термінал 116 доступу по прямій лінії 118 зв'язку і приймають інформацію від термінала 116 доступу по зворотній лінії 120 зв'язку. Більше того, термінал 122 доступу знаходиться у взаємодії з антенами 104 і 106, антени 104 і 106 передають інформацію в термінал 122 доступу по прямій лінії 124 зв'язку і приймають інформацію від термінала 122 доступу по зворотній лінії 126 зв'язку. У дуплексній системі з частотним розділенням (FDD) пряма лінія 118 зв'язку може використовувати інший частотний діапазон, ніж той, який використовувався зворотною лінією 120 зв'язку, і пряма лінія 124 зв'язку може використовувати інший частотний діапазон, ніж той, який використовується, наприклад, зворотною лінією 126 зв'язку. Додатково, в дуплексній системі з часовим розділенням (TDD) пряма лінія 118 зв'язку і зворотна лінія 120 зв'язку можуть використовувати загальний частотний діапазон і пряму лінію 124 зв'язку і зворотну лінію 126 зв'язку може використовувати загальний частотний діапазон. Кожна група антен і/або зона, в якій вони позначаються для взаємодії, можуть згадуватися як сектор базової станції 102. Наприклад, групи антен можуть позначатися для взаємодії з терміналами доступу в секторі зон, що покриваються базовою станцією 102. У взаємодії по прямих лініях 118 і 124 зв'язку передавальні антени базової станції 102 можуть використовувати формування діаграми спрямованості антени для поліпшення відношення "сигнал-шум" прямих ліній 118 і 124 зв'язку для терміналів 116 і 122 доступу. Крім того, хоча базова станція 102 використовує формування діаграми спрямованості для передачі в термінали 116 і 122 доступу, 5 UA 103615 C2 5 10 15 20 25 30 35 40 45 50 55 60 розкидані випадково по асоційованій зоні охоплення, термінали доступу в сусідніх стільниках можуть бути предметом для менших перешкод як порівнюється з базовою станцією, що передає через єдину антену у всі свої термінали доступу. Фіг.2 ілюструє систему 200, яка здійснює керування функціями автоматичного зв'язку сусідів в бездротових мережах. Система 200 може включати в себе базову станцію 202, яка може типово використовуватися для безпосередньої взаємодії з одним або більше мобільними пристроями, терміналом доступу, або іншим абонентським обладнанням (не показано) і додатково може бути в постійному і/або оперативному або випадковому і/або переривчатому зв'язку з операційною і керуючою системою 204. Оскільки основні функціональні можливості базової станції 202 роз'яснюються вище, докладний опис подібних ознак опущений для стислості і виразності. Проте, оскільки проілюстрована базова станція 202 може також включати в себе компонент 206 керування радіоресурсами, які можуть відповідати за обробку сигналізації керуючої площини рівня 3 між одним або більше мобільними пристроями, терміналом доступу, або іншим абонентським обладнанням і наземною мережею радіодоступу універсальної системи мобільного зв'язку, і додатково може здійснювати функції для встановлення з'єднання і вивільнення, широкомовлення системної інформації, створення однонаправленого радіоканалу/реконфігурації і вивільнень, процедур мобільності з'єднання з керуванням радіоресурсами, повідомлення про пейджинг і вивільнення і, наприклад, керування потужністю основним контуром. Додатково, компонент 206 керування радіоресурсами може також приймати запити про вимірювання від компонента 208 автоматичного зв'язку сусідів і у відповідь відправляти звіти про вимірювання в компонент 208 автоматичного зв'язку сусідів для додаткового аналізу і/або обробки. Як мається на увазі вище, базова станція 202 може також включати в себе компонент 208 автоматичного зв'язку сусідів, який може передбачати і/або здійснювати функцію ANR (автоматичні зв'язки сусідів), яка в поєднанні з іншими компонентами, асоційованими або включеними в компонент 208 автоматичного зв'язку сусідів може створювати і/або оновлювати набір із зв'язків сусідів, використовуючи термінал доступу або вимірювання абонентського обладнання виявлених стільників, сполучених за допомогою компонента 206 керування радіоресурсами, а також іншу внутрішню інформацію (наприклад, лічильники), згідно з одним або більше аспектами, викладеними в матеріалах даної заявки. У одному аспекті набір із зв'язків сусідів може бути організований в таблицю зв'язків сусідів (NRT). Додатково, компонент 208 автоматичного зв'язку сусідів може також оновлювати операційну і керуючу систему 204 про дії, здійснювані функцією ANR і може у відповідь приймати і/або запитувати з операційної і керуючої системи 204 зв'язку сусідів, які повинні додаватися або усуватися, а також обмеження, які можуть застосовуватися для зв'язків сусідів. Як проілюстровано, компонент 208 автоматичного зв'язку сусідів може включати в себе компонент 210 керування зв'язками сусідів, який може приймати або запитувати з операційної і керуючої системи 204 зв'язку сусідів, які повинні бути додані і/або усунені за допомогою компонента 210 керування зв'язками сусідів. Додатковий компонент 210 керування зв'язками сусідів може також передавати звіти про виявлення сусідів в операційну і керуючу систему 204 для додаткової обробки і/або аналізу. Звіти про виявлення сусідів можуть відсилатися за допомогою компонента 208 автоматичного зв'язку сусідів і типово включати в себе вимірювання абонентського обладнання виявлених стільників. Потрібно відмітити, без обмеження або втрати застосовності, що операційна і керуюча система 204 може конфігурувати або задавати критерії, які повинні використовуватися компонентом 208 автоматичного зв'язку сусідів для відправлення звітів про виявлення сусідів. Звіти про виявлення сусідів, передані компонентом 208 автоматичного зв'язку сусідів в операційну і керуючу систему 204, можуть дозволяти операційній і керуючій системі 204 краще оновлювати обмеження, які можуть накладатися на функціональні можливості автоматичного зв'язку сусідів і/або засіб, передбачений компонентом 208 автоматичного зв'язку сусідів. Додатково і/або альтернативно, звіти про виявлення сусідів, що надаються компонентом 208 автоматичного зв'язку, можуть використовуватися також для інших цілей, таких як функціональні можливості самоорганізовної мережі (SON), які типово можуть продовжуватися операційною і керуючою системою 204 (наприклад, оптимізація охоплення, оптимізація хендовера і т. д.). Додатково, компонент 208 автоматичного зв'язку сусідів може також включати в себе компонент 212 усунення сусідів, який може передбачати введення в компонент 210 керування зв'язками сусідів відносно зв'язків сусідів, які повинні бути усунені. Компонент 212 усунення зв'язків може використовувати внутрішню інформацію, наприклад, внутрішні вимірювання, зібрані з інших компонентів, що асоціюються з базовою станцією 202, або що зберігаються на запам'ятовуючому носії, включеним з базовою станцією 202, для того щоб встановити, які 6 UA 103615 C2 5 10 15 20 25 30 35 40 45 50 55 60 зв'язки сусідів повинні бути усунені. Додатково і/або альтернативно, компонент 212 усунення сусідів може одержувати або витягувати звіти про вимірювання з компонента 206 радіоресурсів для того, щоб встановити, які зв'язки сусідів, які типово встановлюються і/або зберігаються базовою станцією 202, повинні бути усунені. Якщо компонент 212 усунення сусідів встановив зв'язки сусідів, які повинні бути усунені, компонент 212 усунення сусідів може спрямовувати компонент 210 керування зв'язками сусідів для видалення або усунення зв'язків сусідів, що ідентифікуються. Можливість операційної і керуючої системи 204 для усунення зв'язку сусідів або для запиту усунення зв'язку сусідів за допомогою функції ANR в базовій станції може бути необхідним в декількох практичних сценаріях. У першому ілюстративному сценарії стільник може вказати щонайменше два стільники з ідентичним фізичним ідентифікатором стільника (PCID) як його сусіда. У цьому випадку, як тільки один з двох стільників з ідентичними PCID ініціює додавання нового зв'язку сусідів, інший стільник з ідентичним PCID ніколи не буде виявлений. Цей стан відмови може виникнути, коли останній є даним сусіднім стільником, тоді як попередній є таким, що втручається або є джерелом перешкод. Коли це відбувається, хендовери для даного сусіднього стільника не є можливими, що приводить до високих швидкостей відмови викликів, поганою роботою користувача і втраті прибутків. Відповідно, операційна і керуюча система 204 потребує пристрою для спрямування компонента 212 усунення сусідів для запобігання зв'язкам сусідів, асоційованих із заважаючими або конфліктуючими сусідніми стільниками з створеного або збереженого компонента 208 автоматичного зв'язку сусідів. Навпаки, операційна і керуюча система 204 також потребує додаткового пристрою для додавання зв'язків сусідів, асоційованих з даним сусіднім стільником, або запитувати його додавання з компонента 208 автоматичного зв'язку сусідів. У додатковому ілюстративному сценарії PCID з двох сусідніх стільників можуть обмінюватися, при цьому компонент 208 автоматичного зв'язку сусідів, асоційований з базовою станцією 202, може в цьому прикладі бути не інформованим про обмін і як така базова станція 202 направить хендовери в невірний стільник, викликаючи збої хендоверів і/або втрати стільників. Цей несправний стан може виправлятися, допускаючи операційній і керуючій системі 204 усувати зв'язки сусідів або запитувати їх усунення з компонента 208 автоматичного зв'язку сусідів. У ще додатковому ілюстративному сценарії оператор бездротового зв’язку може постійно ухвалювати рішення відключити стільник з мережі. Зв'язки сусідів, асоційовані з відключенням стільників, повинні бути усунені з всіх базових станцій, в яких вони зберігаються так, щоб їх PCID могли повторно використовуватися. Дозвіл для операційної і керуючої системи 204 пристрою для усунення вибулого стільника може збільшити ефективність використання ресурсів по мережі. У іншому ілюстративному сценарії операційна і керуюча система 204 може мати додаткову недавно виведену інформацію, яка раніше не була доступною для базової станції 202, наприклад, зв'язку сусідів в сусідніх базових станціях, вимірювання продуктивності з сусідніх базових станцій, вимірювання продуктивності з базової мережі, і т. д., які можуть вирівнювати усунення зв'язку сусідів. Додатково, компонент 208 автоматичного зв'язку сусідів може також включати в себе компонент 214 виявлення сусідів, який може приймати або одержувати звіти про вимірювання виявлених стільників з компонента 206 керування радіоресурсами, і може, отже, використовувати прийняті звіти про керування для ідентифікації зв'язків сусідів, які повинні існувати. При ідентифікації зв'язків сусідів, які повинні бути додані, компонент 214 виявлення сусідів може вказувати для компонента 210 керування зв'язками сусідів для додавання зв'язку сусідів, асоційованого з сусідом, що ідентифікується. Для того, щоб надати краще керування по функціональних можливостях автоматичного зв'язку сусідів, здійснюваних за допомогою компонента 208 автоматичного зв'язку сусідів і кращу сумісність між варіантами здійснення численних розробників, заявлений предмет винаходу, і зокрема, компонент 208 автоматичного зв'язку сусідів може використовувати порогові значення додавання сусідів і/або усунення сусідів. Ці порогові значення дозволяють додавання нових і усунення існуючих зв'язків сусідів. Порогові значення (наприклад, порогове значення додавання сусідів і/або порогове значення усунення сусідів) можуть встановлюватися і/або конфігуруватися за допомогою операційної і керуючої системи 204 і, можуть, отже, прямувати в компонент 210 керування зв'язками сусідів. Типово і відповідно до аспекту заявленого предмета винаходу, порогові значення додавання і/або усунення сусідів можуть задаватися кількістю разів, яку сусідній стільник звітований або не звітований в звітах про вимірювання, що надаються за допомогою компонента 206 керування радіоресурсами під час фіксованого інтервалу часу. Наприклад, компонент 204 операційної і керуючої системи може спрямовувати компонент 208 автоматичного зв'язку сусідів і його пов'язаний компонент, що якщо сусідній стільник звітований в звітах про вимірювання, що надаються компонентом 206 7 UA 103615 C2 5 10 15 20 25 30 35 40 45 50 55 60 керування радіоресурсами більше ніж десять разів в останні 72 години, що новий зв'язок сусідів, асоційований з подібним сусіднім стільником, повинен бути. Аналогічно, порогове значення усунення сусіда може бути задане за допомогою кількості разів, яку сусідній стільник не звітований в звіти про вимірювання, що представляються компонентом 206 керування радіоресурсами протягом фіксованого проміжку часу. Наприклад, керуючий компонент 206 операцій і керування може спрямовувати компонент 208 автоматичного зв'язку сусідів і його асоційовані компоненти, що якщо сусідній стільник не звітований в звіти про вимірювання, прийняті з компонента 206 керування радіоресурсами щонайменше десять разів в межах останніх 72 годин, що зв'язок сусідів, асоційований з подібним сусіднім стільником, є хорошим варіантом для усунення. Додатково і/або альтернативно і відповідно до додаткового аспекту заявленого предмета винаходу, порогові значення додавання і/або усунення сусідів можуть бути задані за допомогою кількості разів, яку сусідній стільник був або не був звітований в звіти про вимірювання, що надаються компонентом 206 керування радіоресурсами і додаткова ідентифікація може бути виконана як для кількості прикладів в межах проміжку часу, в яку якість виявленого стільника перевершував або падав нижче за межу якості. Наприклад, операційна і керуюча система 204 може спрямовувати компонент 208 автоматичного зв'язку сусідів і його асоційовані компоненти для додавання зв'язку сусідів, коли сусідній стільник звітований як такий, що перевищив межу якості фіксовану кількість разів (наприклад, 5) в межах фіксованого проміжку часу (наприклад, 24 години). Навпаки, операційна і керуюча система 204 може означати для компонента автоматичного зв'язку сусідів і його пов'язаних компонентів, що зв'язок сусідів, асоційований з сусіднім стільником, який звітований як такий, що не має перевищену межу якості фіксовану кількість разів (наприклад, 5) в межах фіксованого проміжку часу (наприклад, 24 години) повинен бути усунений. Таким чином, зв'язок сусідів може бути встановлений або усунений між стільниками, що керуються або обслуговуються тією ж самою базовою станцією (наприклад, базовою станцією 202). Потрібно відмітити без обмеження або втрати застосовності, що одне або більше вимірювання продуктивності, що використовуються в матеріалах даної заявки, стосується звітів абонентського обладнання виявлених стільників. Ці звіти про вимірювання продуктивності можуть використовуватися для поліпшення можливості операційної і керуючої системи 204 для ефективного керування або впливу на компоненти автоматичного зв'язку сусідів, асоційованого з однією або більше базовими станціями, предмет для керування операційною і керуючою системою 204. Вимірювання продуктивності може відстежувати (наприклад, вважати) одне або більше з подальших вимірювань, які включають в себе (i) кількість разів, яку кожний стільник звітувався за допомогою абонентського обладнання; (ii) максимальне, середнє або інші особливі відмітки інтенсивності сигналу кожного сполученого стільника; (iii) загальну кількість додатків і/або усунень із зв'язків сусідів; (iv) кількість додатків і/або усунень із зв'язків сусідів, що робляться компонентом автоматичних зв'язків сусідів, що асоціюється з базовою станцією; (v) кількість різного абонентського обладнання (наприклад, з'єднання з керуванням радіоресурсами), яка повідомляла про кожний стільник; (vi) загальну кількість існуючих зв'язків сусідів; (vii) кількість зв'язків сусідів в компоненті, що створюється автоматичними зв'язками сусідів; (viii) кількість зв'язків сусідів з станом без усунення; (ix) кількість зв'язків сусідів з станом без хендовера; (х) кількість зв'язків сусідів з станом без X2; (xi) кількість зв'язків сусідів з станом активного хендовера; і (xii) кількість зв'язків сусідів з станом активного X2. Ці вимірювання продуктивності можуть використовуватися для оптимізації порогових значень додавання і/або усунення сусідів, а також для оновлення обмежень OAM по зв'язках сусідів, що встановлюється і що зберігається кожною базовою станцією в бездротовій мережі. Як буде братися до уваги фахівцями з помірними знаннями в цій галузі зусиль, одне або більше з вищезазначених вимірювань продуктивності можуть також використовуватися для інших цілей, наприклад, оптимізація охоплення. Наприклад, одне або більше з вимірювань продуктивності можуть використовуватися іншими функціями самоорганізовної мережі (SON). Наприклад, для оптимізації охоплення вимірювання продуктивності загальної кількості існуючих зв'язків сусідів може переважно використовуватися для ідентифікації стільників з сильними перешкодами від інших стільників. Додатково, одне або більше з вищевикладених вимірювань продуктивності, наприклад, кількість доповнень і/або усунень зв'язків сусідів за допомогою компонента автоматичного зв'язку сусідів (наприклад, компонент 208 автоматичного зв'язку сусідів) може вигідно використовуватися для ідентифікації стільників з фрагментованим охопленням. Фіг. 3 передбачає додаткове відображення 300 операційної і керуючої системи 204, яка відповідно до аспекту заявленого предмета винаходу, здійснює керування функціями 8 UA 103615 C2 5 10 15 20 25 30 35 40 45 50 55 60 автоматичного зв'язку сусідів в бездротових мережах. Як проілюстровано, операційна і керуюча система 204 може включати в себе компонент 302 керування автоматичним зв'язком сусідів, який може приймати і/або запитувати інформацію про дії функції ANR і/або звіти виявленні сусідів з базової станції 202, і зокрема, від компонента 208 автоматичного зв'язку сусідів, включеного в базову станцію 202. Крім того, компонент 302 керування автоматичним зв'язком сусідів може спрямовувати в базову станцію 202, і більш конкретно, компонент 208 автоматичного зв'язку сусідів, додавати і/або оновлювати вказівки зв'язку сусідів, порогові значення усунення і/або додавання і виявлень сусідів, які можуть використовуватися компонентом 208 автоматичного зв'язку сусідів для керування, модифікації, додавання або усунення зв'язків сусідів. Компонент 302 керування автоматичним зв'язком сусідів може включати в себе компонент встановлення і оновлення, компонент 306 конфігурації і компонент 308 оновлення обмежень. Відповідно до одного аспекту заявленої формули винаходу на основі, щонайменше частково, входу, прийнятого від компонента керування зв'язками сусідів (наприклад, компонент 210 керування зв'язками сусідів), асоційований з компонентом автоматичного зв'язку сусідів, включеного за допомогою базової станції (наприклад, компонент 208 автоматичного зв'язку сусідів, включений за допомогою базової станції 202) і вхід, прийнятий від компонента 308 оновлення обмежень, компонент 304 встановлення і оновлення може передавати вказівки додавання і/або оновлення зв'язку сусідів в базову станцію у взаємодії з операційною і керуючою системою 204, і більш конкретно, компонент встановлення і оновлення може надавати вказівки додавання і/або оновлення зв'язку сусідів в компонент керування зв'язками сусідів базової станції у взаємодіях з операційною і керуючою системою 204. Вказівки додавання і/або оновлення зв'язку сусідів, що передаються в базову станцію, можуть при прийомі використовуватися для встановлення або додавання зв'язків сусідів і/або для оновлення зв'язків сусідів, при цьому зв'язки сусідів підтримуються за допомогою базової станції. Потрібно відмітити без обмеження або втрати застосовності, як буде братися до уваги помірно обізнаним в цій галузі зусиль, що кожна базова станція, яка знаходиться відповідно до операційної і керуючої системи 204, типово підтримує зв'язки своїх власних сусідів. Компонент 302 керування автоматичним зв'язком сусідів може також включати в себе компонент 306 конфігурації, який може передбачатися для базової станції в обміні даними з компонентом 204 операцій і керування, виявленні сусідів, порогових величинах додавання і/або усунення сусідів, що базова станція і, зокрема, асоційований компонент автоматичного зв'язку сусідів (наприклад, компонент 208 автоматичного зв'язку сусідів, включений за допомогою базової станції 202) може використовуватися для виявлення, додавання і/або усунення зв'язків сусідів, створеного і/або що підтримується базовою станцією. Зокрема, компонент 306 конфігурації може надавати порогові величини усунення сусідів для компонента 212 усунення сусідів і порогові значення виявлення і додатки сусідів для компонента 214 виявлення сусідів. Додатково, компонент 302 керування автоматичним зв'язком сусідів може також включати в себе компонент 308 оновлення обмежень, який може приймати або запитувати введення від компонента керування зв'язками сусідів і звіти виявлення сусідів від компонента автоматичного зв'язку сусідів, асоційованого з відповідною або взаємодіючою базовою станцією (наприклад, компонент 208 автоматичного зв'язку сусідів, включений за допомогою базової станції 202). Зокрема, компонент 308 оновлення обмежень може одержувати введення від компонента керування зв'язком сусідів (наприклад, компонент 210 керування зв'язком сусідів) і додатково може одержувати звіти виявлення сусідів від компонента виявлення сусідів (наприклад, компонент 214 виявлення сусідів), кожний компонент керування зв'язками сусідів і компонент виявлення сусідів може бути пов'язаний з базовою станцією, з якою операційна і керуюча система 204 знаходиться у відповідності. Якщо компонент 308 оновлення обмежень одержав введення від компонента керування зв'язком сусідів і/або звіти виявлення сусідів, він може, можливо, після аналізу і/або додаткової обробки, надати для компонента 304 установки і оновлення введення, який компонент 304 установки і оновлення може використовувати в наданні вказівок зв'язку сусідів для відповідної базової станції, яка при прийомі може використовуватися для встановлення або додавання і/або оновлення зв'язків сусідів, що підтримується базовою станцією. Фіг. 4 передбачає ще додаткове відображення 400 операційної і керуючої системи 204, яка відповідно до аспекту заявленого предмета винаходу, здійснює керування функціями автоматичного зв'язку сусідів в бездротових мережах. Як відобразила операційна і керуюча система 204, в доповнення до компонента 302 керування автоматичним зв'язком сусідів, функціональні можливості і засоби яких розглянуті вище, можуть також включати в себе компонент 402 керування оптимізацією хендовера, компонент 404 керування перешкодами, і 9 UA 103615 C2 5 10 15 20 25 30 35 40 45 50 55 60 компонент 406 оптимізації охоплення і пропускної здатності, кожний з яких окремо і/або в поєднанні може передбачати функції самоорганізовної мережі для мережі бездротового зв’язку. Відповідно до цього аспекту заявлений предмет винаходу, компонент 402 керування оптимізацією хендовера, компонент 404 керування перешкодами і компонент 406 керування обхватом і пропускною здатністю може передбачати різні функціональні можливості і/або засоби, які можуть бути поліпшені за допомогою використання зворотного зв'язку або подавати в прямому напрямі, прийняті від компонентів автоматичних зв'язків сусідів (наприклад, компонент 208 автоматичного зв'язку сусідів), асоційованих з базовими станціями, що обслуговуються операційною і керуючою системою 204. Зокрема, звіти про виявлення сусідів від компонентів виявлення сусідів (наприклад, компонент 214 виявлення сусідів), асоційованих з компонентами автоматичного зв'язку сусідів (наприклад, компонент 208 автоматичного зв'язку сусідів) і включених за допомогою базових станцій (наприклад, базова станція 202) можуть надаватися в або запитуватися компонентом 402 керування оптимізацією хендовера, компонентом 404 керування перешкод і/або компонентом 406 оптимізації охоплення і пропускної здатності. Із посиланням на фіг. 5-9, проілюстровані методики відносно здійснення керування функціями автоматичного зв'язку сусідів в середовищі бездротового зв’язку. Хоча з метою спрощення пояснення методики показані і описані як послідовність дій, необхідно розуміти і брати до уваги, що методики не обмежені порядком дій, оскільки деякі дії можуть, відповідно до одного або більше варіантів здійснення, відбуватися в різному порядку і/або паралельно з іншими діями з тих, які показані і описані в даному документі. Наприклад, фахівці в даній галузі техніки будуть розуміти і брати до уваги, що методика, як альтернатива, могла б бути представлена як послідовність взаємопов'язаних станів або подій, таких як на діаграмі станів. Більше того, не всі проілюстровані дії можуть бути необхідні, щоб реалізувати методику відповідно до одного або більше варіантів здійснення. Із посиланням на фіг. 5 проілюстрована методика 500, яка полегшує керування функціями автоматичного зв'язку сусідів в бездротових мережах. Спосіб 500 може починатися на 502, при цьому порогові значення додавання і/або усунення сусідів можуть використовуватися для керування функція автоматичного зв'язку сусідів, асоційованого з базовою станцією. На 504 логічні функції в функції автоматичного зв'язку сусідів, яким поставлена задача з прийняттям рішень про додавання і/або усунення зв'язків сусідів, можуть оновлюватися за допомогою порогового значення додавання сусідів і/або порогового значення усунення сусідів для додавання або усунення зв'язків сусідів. На 506 порогове значення додавання сусідів або порогове значення усунення сусідів може конфігуруватися як задане за допомогою трьох параметрів в функції автоматичного зв'язку сусідів. Фіг. 6 ілюструє методику 600, яка полегшує або здійснює керування функціями автоматичного зв'язку сусідів в бездротових мережах відповідно до аспекту заявленого предмета винаходу. Спосіб 600 може починатися на 602, при цьому кількість разів, яку кожний сусідній стільник звітований за допомогою термінала доступу в межах фіксованого проміжку часу, може вважатися і результати утримуватися або зберігатися. На 604 кількість разів, яку кожний сусідній стільник звітований за допомогою термінала доступу в межах інтервалу часу і з якістю сигналу, яка перевищує порогове значення, може вважатися і зберігатися. На 606 сусідній стільник, який звітований щонайменше фіксовану кількість разів в межах фіксованого проміжку часу, може бути виявлений. На 608 сусідній стільник, який звітований щонайменше фіксовану кількість разів в межах визначеного часу (наприклад, кінцевий або фіксований проміжок часу) з якістю стільника, яка перевищує порогове значення, може бути виявлений. На 610 сусідній стільник, який звітований менше ніж фіксовану кількість разів в межах встановленого проміжку часу, може бути виявлений. На 612 сусідній стільник, який звітований менше ніж фіксовану кількість разів в межах фіксованого проміжку часу і який має якість сигналу, яка перевищує порогове значення, може бути виявлений, після якої спосіб 600 може приступати до дії А. Фіг. 7 ілюструє спосіб 700, який є продовженням методики, відображеної на фіг. 6, який приводить в дію або полегшує керування функціями автоматичного зв'язку сусідів в бездротових мережах відповідно до аспекту заявленого предмета винаходу. Спосіб 700 може починатися на 702, при цьому зв'язок сусідів може бути встановлений, коли звіти сусіднього стільника мають місце щонайменше фіксовану кількість разів в межах часового інтервалу. На 704, зв'язок сусідів може бути встановлений, коли звіти з сусіднього стільника відбуваються щонайменше фіксовану кількість разів в межах фіксованого часового інтервалу і якість сигналу сусіднього стільника перевищує порогове значення. На 706 зв'язок сусідів може бути усунена, коли подія, що повідомляється з сусіднього стільника, падає нижче фіксованої кількості разів в 10 UA 103615 C2 5 10 15 20 25 30 35 40 45 50 55 60 межах фіксованого проміжку часу. На 708 зв'язок сусідів може бути встановлений, коли подія, що повідомляється, падає нижче фіксованої величини часу в межах фіксованого проміжку часу і якість сигналу з сусіднього стільника перевищує порогове значення. Фіг. 8 ілюструє методику 800, яка полегшує керування функціями автоматичного зв'язку сусідів в бездротових мережах відповідно до додаткового аспекту заявленого предмета винаходу. Спосіб 800 може починатися на 802, при цьому інформація, доступна в операційній і керуючій системі, може використовуватися для визначення, чи додавати чи ні або усувати зв'язки сусідів. На 804 запит від операційної і керуючої системи в функцію автоматичного зв'язку сусідів, включеної за допомогою базової станції, може передаватися, запит може використовуватися для додавання або усунення зв'язку сусідів. На 806 може забезпечуватися запит від операційної і керуючої системи в функцію автоматичного зв'язку сусідів, запит може використовуватися для заборони встановлення інтерфейсу Х2 для сусіднього стільника або групи стільників. На 808 може забезпечуватися запит від операційної і керуючої системи в функцію автоматичного зв'язку сусідів, запит може використовуватися для заборони хендоверів для сусіднього стільника або групи стільників. Фіг. 9 ілюструє спосіб 900, який є продовженням методики, відображеної на фіг. 8, який приводить в дію або полегшує керування функціями автоматичного зв'язку сусідів в бездротових мережах відповідно до аспекту заявленого предмета винаходу. Спосіб 900 може починатися на 902, при цьому операційна і керуюча система може бути повідомлена про оновлення в списку сусідніх стільників. На 904 функція автоматичного зв'язку сусідів може передбачати стан зв'язку сусідів для операційної і керуючої системи. На 906 пріоритети для створення інтерфейсів Х2 для сусідніх стільників можуть передаватися з операційної і керуючої системи в базову станцію, яка створює і/або підтримує таблицю зв'язків сусідів з набору існуючих зв'язків сусідів. Фіг. 10 відображає ілюстративну таблицю 1000 зв'язків сусідів, яка може бути створена і/або підтримуватися компонентом автоматичного зв'язку сусідів, асоційованим з базовою станцією. Як можна спостерігати, таблиця 100 зв'язків сусідів може включати в себе рядки і стовпці, при цьому кожний рядок задає зв'язок сусідів, в якому кожний зв'язок сусідів включає в себе ідентифікатор локального стільника, ідентифікатор кінцевого стільника, ознаку "немає усунення" (де, якщо встановлена ознака "немає усунення", базова станція за допомогою свого асоційованого компонента автоматичних зв'язків сусідів не повинна усувати зв'язок сусідів з таблиці), ознаку "немає хендовера" (де, якщо встановлена ознака "немає хендовера", базова станція за допомогою свого пов'язаного з нею компонента автоматичних зв'язків сусідів повинна перешкоджати зв'язку сусідів з хендовера, що використовується для цілей ) і ознака "немає Х2" (де, якщо встановлена ознака "немає Х2", жодний інтерфейс Х2 не створюється відносно базової станції, будучи батьківським рівнем стільника). У одному аспекті ознаки "немає Х2" і/або будь-які інші керовані OAM атрибути, асоційовані із з'єднаннями Х2, можуть підтримуватися в окремій таблиці, в якій кожний рядок задає зв'язок сусідів на рівні базової станції. Зв'язок сусідів на рівні базової станції може включати в себе щонайменше ідентифікатор локальної базової станції, ідентифікатор кінцевої базової станції і ознаку "немає Х2". Як буде брати до уваги, що відповідно до одного або більше аспектів, описаними в матеріалах даної заявки, логічні висновки можуть бути зроблені відносно керування функціями автоматичного зв'язку сусідів в бездротових мережах. Як що використовується в матеріалах даної заявки, термін "робити логічний висновок" або "логічний висновок" загалом вказує посиланням на процес логічного міркування про або логічного виведення станів системи, середовища, і/або користувача з набору спостережень, які зафіксовані за допомогою подій і/або даних. Логічний висновок може бути використаний, щоб ідентифікувати окремий контекст або дію, або, наприклад, може формувати розподіл імовірностей по станах. Логічний висновок може бути ймовірнісним - тобто, обчисленням розподілу імовірностей по цікавлячих станах на основі аналізу даних і подій. Логічний висновок також може вказувати посиланням на методики, що використовуються для компонування високорівневих подій з набору подій і/або даних. Такий логічний висновок має результатом структуру нових подій або дій з набору подій, що спостерігаються, і/або збережених подійних даних, в будь-якому випадку, є чи ні події взаємопов'язаними в безпосередній часовій близькості, і чи є події і дані що відбуваються від одного або декількох джерел подій і даних. Фіг. 11 є ілюстрацією системи 1100, яка полегшує керування функціями автоматичного зв'язку сусідів в бездротових мережах. Система 1100 містить базову станцію 202 (наприклад, точку доступу,...) з приймачем 1108, який приймає сигнал(и) від одного або більше терміналів доступу за допомогою множини приймальних антен 1104, і передавач 1120, який передає в один або більше терміналів 1102 доступу за допомогою передавальної антени 1106. Приймач 11 UA 103615 C2 5 10 15 20 25 30 35 40 45 50 55 60 1108 може приймати інформацію від приймальних антен 1104 і оперативно асоційований з демодулятором 1110, яким демодулює прийняту інформацію. Демодульовані символи аналізуються процесором 1112, виділеним для аналізу інформації, прийнятої приймачем 1108 і/або формування інформації для передачі передавачем 1120, процесор, який керує одним або більше компонентами базової станції 202, і/або процесор, який як аналізує інформацію, прийняту приймачем 1108, формує інформацію для передачі передавачем 1108, так і керує одним або більше компонентами базової станції 202, і який сполучається з пам'яттю 1114, яка зберігає дані, які необхідно передавати в або приймати від термінала(ів) 1102 доступу (або окрема базова станція (не показано)) і/або будь-яка інша відповідна інформація, пов'язана із здійсненням різних дій і функцій, викладених в матеріалах даної заявки. Процесор 1112 додатково сполучений з компонентом 1116 автоматичного зв'язку сусідів, який полегшує передачу мови з комутацією каналів по мережах з пакетною комутацією. Додатково, компонент 1116 автоматичного зв'язку сусідів може передбачати інформацію, яку необхідно передавати в модулятор 1118. Модулятор 1118 може мультиплексувати кадр для передачі за допомогою передавача 1120 за допомогою антен 1106 в термінал(и) 1102 доступу. Хоча відображений як окремий від процесора 1112, потрібно брати до уваги, що компонент 1116 автоматичного зв'язку сусідів і/або модулятор 1118 можуть бути частиною процесора 1112 або множини процесорів (не показано). Фіг.12 показує зразкову систему 1200 бездротового зв’язку. Система 1200 бездротового зв’язку відображає одну базову станцію 1210 і один термінал 1250 доступу скорочено. Однак потрібно брати до уваги, що система 1200 може включати в себе більше ніж одну базову станцію і/або більше ніж один термінал доступу, при цьому додаткові базові станції і/або термінали доступу можуть бути в основному аналогічні або різні для зразкової базової станції 1210 і термінала 1250 доступу, описаного нижче. Крім того, потрібно брати до уваги, що базова станція 1210 і/або термінал 1250 доступу можуть використовувати системи (фіг. 1-4) і/або способи (фіг. 5-9), описані в даному документі, щоб полегшити бездротовий зв'язок між ними. У базовій станції 1210 дані трафіку для множини потоків даних надані з джерела 1212 даних для передавального (TX) процесора 1214 даних. Згідно з прикладом кожний потік даних може бути переданий по відповідній антені. Процесор 1214 даних TX форматує, кодує і перемежовує потік даних трафіку на основі конкретної схеми кодування, вибраної для цього потоку даних, щоб надати кодовані дані. Кодовані дані для кожного потоку даних можуть мультиплексуватися за допомогою даних контрольного сигналу, використовуючи методики OFDM (мультиплексування з ортогональним частотним розділенням сигналів). Додатково або альтернативно, контрольні символи можуть бути мультиплексовані з частотним розділенням сигналів (FDM), з часовим розділенням сигналів (TDM) або з кодовим розділенням сигналів (CDM). Дані контрольного сигналу є типово відомим шаблоном даних, який обробляється відомим способом і може використовуватися в терміналі 1250 доступу для оцінки характеристики каналу. Мультиплексовані дані контрольного сигналу і кодовані дані для кожного потоку даних можуть модулюватися (наприклад, перетворюються символи) на основі конкретної схеми модуляції (наприклад, двійкова фазова маніпуляція (BPSK), квадратурна фазова маніпуляція (QSPK), М-фазова маніпуляція (M-PSK), М-квадратурна амплітудна модуляція (M-QAM) і т. д.), вибраної для цього потоку даних для надання символів модуляції. Швидкість передачі даних, кодування і модуляція для кожного потоку даних можуть бути визначені командами, що виконуються або надаються процесором 1230. Символи модуляції для потоків даних можуть надаватися процесору 1220 TX MIMO, який може додатково обробляти символи модуляції (наприклад, для OFDM). Процесор 1220 TX MIMO потім надає NT потоків символів модуляції для приймачів-передавачів (TMTR) NT з 1222a по 1222t. У різних варіантах здійснення процесор 1220 TX MIMO використовує ваги формування діаграми спрямованості для символів потоків даних і для антени, від якої передається символ. Кожний передавач 1222 приймає і обробляє відповідний потік символів для надання одного або більше аналогових сигналів і додатково приводить в визначений стан (наприклад, посилює, фільтрує і перетворює з підвищенням частоти) аналогові сигнали для надання модульованого сигналу, придатного для передачі по каналу MIMO. Крім того, NT модульованих сигналів від передавачів з 1222a по 1222t потім передаються від NT антен з 1224a по, відповідно, 1224t. У терміналі 1250 доступу передані модульовані сигнали приймаються за допомогою N R антен з 1252a по 1252r і прийнятий сигнал від кожної антени 1252 надається у відповідний приймач (RCVR) з 1254a по 1254r. Кожний приймач 1254 приводить в певний стан (наприклад, фільтрує, посилює, і перетворює з пониженням частоти) відповідний сигнал, перетворює в 12 UA 103615 C2 5 10 15 20 25 30 35 40 45 50 55 60 цифрову форму приведений в певний стан сигнал, щоб надати вибірки, і додатково обробляє вибірки, щоб надати відповідний "прийнятий" потік символів. Процесор 1260 даних RX може приймати і обробляти N R прийнятих потоків символів від NR приймачів 1254 на основі конкретної методики обробки приймача для надання NT "виявлених" потоків символів. Процесор 1260 даних RX може демодулювати, зворотно перемежовувати і декодувати кожний виявлений потік символів для відновлення даних трафіку для потоку даних. Обробка процесором 1260 даних RX є додатковою до здійснюваної процесором 1220 TX MIMO і процесором 1214 даних TX в базовій станції 1210. Процесор 1270 може періодично визначати, яку доступну технологію необхідно використовувати, як описано вище. Додатково процесор 1270 може формулювати повідомлення зворотної лінії зв'язку, що містить частину індексів матриці і частину оцінних значень. Повідомлення зворотної лінії зв'язку може містити різні типи інформації відносно каналу зв'язку і/або прийнятого потоку даних. Повідомлення зворотної лінії зв'язку може оброблятися за допомогою процесора 1238 даних TX, який також приймає дані трафіку для множини потоків даних з джерела 1236 даних, модульованих модулятором 1280, приведені в певний стан передавачами з 1254a по 1254r і що передаються зворотно в базову станцію 1210. У базовій станції 1210 модульовані сигнали від термінала 1250 доступу приймаються антенами 1224, приведені в певний стан приймачами 1222, демодульовані демодулятором 1240 і оброблені процесором 1242 даних RX для витягання повідомлення зворотної лінії зв'язку, доступу, що передається терміналом 1250. Додатково, процесор 1230 може обробляти витягнуте повідомлення для визначення, яку матрицю попереднього кодування використовувати для визначення ваги формування діаграми спрямованості антени. Процесори 1230 і 1270 можуть спрямовувати (наприклад, контролюють, координують, керують і т. д.) роботою в базовій станції 1210 і, відповідно, терміналі 1250 доступу. Відповідні процесори 1230 і 1270 можуть асоціюватися з пам'яттю 1232 і 1272, яка зберігає програмні коди і дані. Процесори 1230 і 1270 можуть також виконувати обчислення для витягання частоти і оцінок імпульсної характеристики для висхідної і, відповідно, низхідної лінії зв'язку. У аспекті логічні канали класифікуються на керуючі канали і канали трафіку. Логічні керуючі канали можуть включати в себе широкомовний керуючий канал (BCCH), який є DL-каналом для трансляції системної керуючої інформації. Додатково, логічні керуючі канали можуть включати в себе керуючий канал пошукового виклику (PCCH), який є DL-каналом, який передає інформацію пошуку. Більше того, логічні керуючі канали можуть містити груповий керуючий канал (MCCH), який є DL-каналом "точка-багатоточка", що використовується для передачі мультимедійної широкомовної і групової службової (MBMS) інформації планування і керування для одного або декількох MTCH. Загалом, після встановлення RRC-з'єднання (керування радіо ресурсами), цей канал лише використовується UE, які приймають MBMS (наприклад, колишній MCCH+MSCH). Крім того, логічні керуючі канали можуть включати в себе виділений керуючий канал (DCCH), який є двонаправленим каналом "точка-точка", який передає виділену керуючу інформацію і може використовуватися UE, які мають RRC-з'єднання. У аспекті, логічні канали трафіку можуть містити виділений канал трафіку (DTCH), який є двонаправленим каналом "точка-точка", виділеним для одного UE, для передачі абонентської інформації. Крім того, логічні канали трафіку можуть включати в себе груповий канал трафіку (MTCH) для DL-каналу "точкабагатоточка" для передачі даних трафіку. У аспекті транспортні канали класифікуються на DL і UL. Транспортні канали DL містять широкомовний канал (BCH), спільно використовуваний канал даних низхідної лінії зв'язку (DLSDCH) і канал пошуку (PCH). PCH може підтримувати енергозбереження UE (наприклад, цикл прийому (DRX), що переривається може означатися мережею для UE,...), транслюючи по всьому стільнику і зіставляючи з ресурсами фізичного рівня (PHY), які можуть використовуватися для інших керуючих каналів/каналів трафіку. UL-транспортні канали можуть містити канал випадкового доступу (RACH), канал запитів (REQCH), спільно використовуваний канал даних висхідної лінії зв'язку (UL-SDCH) і множини PHY-каналів. PHY-канали можуть включати в себе набір DL-каналів і UL-каналів. Наприклад, канали DL PHY можуть включати в себе: загальний контрольний канал (CPICH), канал синхронізації (SCH); загальний керуючий канал (CCCH); спільно використовуваний DL-керуючий канал, (SDCCH); багатоадресний керуючий канал (MCCH); спільно використовуваний канал призначення UL (SUACH); канал підтвердження (ACKCH); канал фізичних спільно використовуваних даних DL (DL-PSDCH); канал керування потужністю UL (UPCCH); індикаторний канал пошукового виклику (PICH); і/або канал індикаторів завантаження (LICH). Як додаткова ілюстрація, канали UL PHY можуть включати в себе: фізичний канал випадкового 13 UA 103615 C2 5 10 15 20 25 30 35 40 45 50 55 60 доступу (PRACH); канал індикаторів якості каналів (CQICH); канал підтвердження (ACKCH); канал індикаторів підмножини антен (ASICH); спільно використовуваний канал запитів (SREQCH); фізичний UL-канал спільно використовуваних даних (UL-PSDCH); і/або широкомовний контрольний канал (BPICH). Потрібно розуміти, що варіанти здійснення, описані в даному документі, можуть бути реалізовані в апаратному забезпеченні, програмному забезпеченні, вбудованому програмному забезпеченні, зв'язуючому програмному забезпеченні, мікрокоді або будь-якому їх поєднанні. Для варіанту здійснення апаратного забезпечення обробляючі блоки можуть бути реалізовані в одній або більше інтегральних схемах прикладної орієнтації (ASIC), цифрових сигнальних процесорах (DSP), цифрових сигнальних обробляючих пристроях (DSPD), програмованих логічних пристроях (PLD), програмованих користувачем вентильних матрицях (FPGA), процесорах, контролерах, мікроконтролерах, мікропроцесорах, інших електронних блоках, спроектованих виконувати функції, описані в даному документі, або їх поєднання. Коли варіанти здійснення реалізовані в програмному забезпеченні, вбудованому програмному забезпеченні, зв'язуючому програмному забезпеченні або мікрокоді, програмному коді або сегментах коду, вони можуть зберігатися в машиночитаному носії, наприклад, компоненті запам'ятовуючого пристрою. Сегмент коду може являти собою процедуру, функцію, підпрограму, програму, процедуру, стандартну підпрограму, модуль, пакет програмного забезпечення, клас або будь-яке поєднання команд, структур даних або операторів програм. Сегмент коду може бути пов'язаний з іншим сегментом коду або апаратною схемою через передачу і/або прийом інформації, даних, аргументів, параметрів або вмісту пам'яті. Інформація, аргументи, параметри, дані і т. д. можуть пересилатися, перенаправляти або передаватися, використовуючи будь-який відповідний засіб, включаючи спільне використання пам'яті, пересилку повідомлень, естафетну передачу, передачу по мережі і т. д. Для програмної реалізації методики, описані в даному документі, можуть бути реалізовані за допомогою модулів (наприклад, процедури, функції і так далі), які виконують функції, описані в даному документі. Коди програмного забезпечення можуть зберігатися в блоках пам'яті і виконуватися процесорами. Блок пам'яті може бути реалізований в процесорі або бути зовнішнім до процесора, в цьому випадку він може бути комунікативно сполучений з процесором через різні засоби як відомо в даній галузі техніки. Із посиланням на фіг. 13, проілюстрована система 1300, яка полегшує керування функціями автоматичного зв'язку сусідів в бездротових мережах в середовищі бездротового зв’язку. Наприклад, система 1300 може постійно знаходитися, щонайменше частково, в базовій станції. Потрібно брати до уваги, що система 1300 представлена як така, що включає функціональні блоки, які можуть бути функціональними блоками, які являють собою функції, реалізовані за допомогою процесора, програмного забезпечення, або їх поєднання (наприклад, вбудованого програмного забезпечення). Система 1300 включає в себе логічне угрупування 1302 електричних компонентів, які можуть діяти спільно. Наприклад, логічне угрупування 1302 може включати в себе електричний компонент для підрахунку або зберігання кількості разів, яку сусідній стільник звітується терміналом доступу в фіксованому часовому інтервалі 1304. Додатково, логічне угрупування 1302 може включати в себе електричний компонент для виявлення події, де сусідній стільник звітується щонайменше фіксовану кількість разів, в межах фіксованого інтервалу часу 1306. Додатково, логічне угрупування 1302 може включати в себе електричний компонент для створення зв'язку сусідів на основі, щонайменше частково, сусіднього стільника, який звітується щонайменше фіксовану кількість разів в межах фіксованого часового інтервалу 1308. Більше того, логічне угрупування 1302 може містити електричний компонент для створення зв'язку сусідів в наборі з існуючих зв'язків сусідів на основі, щонайменше частково, сусіднього стільника, який звітується щонайменше фіксовану кількість разів в межах фіксованого інтервалу часу 1310. Крім того, система 1300 може включати в себе пам'ять 1312, яка зберігає команди для виконання функцій, асоційованих з електричними компонентами 1304, 1306, 1308 і 1310. Хоча показано як зовнішній до пам'яті 1312, потрібно розуміти, що один або більше електричних компонентів 1304, 1306, 1308 і 1310 можуть існувати в межах пам'яті 1312. Те, що було описано вище, включає в себе приклади одного або більше варіантів здійснення. Природно, неможливо описати кожну потенційну комбінацію компонентів або методик для цілей опису вищезазначених варіантів здійснення, але фахівець в даній галузі техніки може визнавати, що багато які додаткові комбінації і зміни різних варіантів здійснення можливі. Відповідно, мається на увазі, що описані варіанти здійснення охоплюють всі подібні зміни, модифікації і варіації, які попадають в межі суті і об'єму, визначеної прикладеною формулою винаходу. Більше того, в тій мірі, в якій термін "включає в себе", використовується 14 UA 103615 C2 або в докладному описі або формулі винаходу, мається на увазі, що подібний термін є охоплюючим, аналогічним терміну що "містить", як той, що "містить" інтерпретується, коли використовується як перехідне слово в формулі винаходу. 5 10 15 20 25 30 35 40 45 50 55 ФОРМУЛА ВИНАХОДУ 1. Пристрій, що діє в системі бездротового зв'язку, який містить: процесор, сконфігурований для визначення будь-якого щонайменше одного доданого або усуненого зв'язку сусідів на основі, щонайменше частково, інформації, асоційованої з операційною і керуючою системою, і відправлення одного або більше запитів на додавання або усунення з операційної і керуючої системи в базову станцію; і пам'ять, з′єднану з процесором для збереження даних, при цьому визначення основане на кількості разів, яку сусідній стільник повідомлявся або не повідомлявся у звіті про керування протягом фіксованого часового інтервалу. 2. Пристрій за п. 1, в якому запит на додавання або усунення використовується базовою станцією для щонайменше одного зі створеного зв'язку сусідів або модифікованого зв'язку сусідів, при цьому зв'язки сусідів підтримуються базовою станцією. 3. Пристрій за п. 1, в якому запит на додавання або усунення використовується базовою станцією для щонайменше однієї з таблиці створених зв'язків сусідів або таблиці модифікованих зв'язків сусідів, при цьому таблиця зв'язків сусідів підтримується базовою станцією. 4. Пристрій, що діє в системі бездротового зв'язку, який містить: процесор, сконфігурований для визначення будь-якого щонайменше одного доданого або усуненого зв'язку сусідів на основі, щонайменше частково, інформації, асоційованої з операційною і керуючою системою, і відправлення одного або більше запитів на додавання або усунення з операційної і керуючої системи в базову станцію; відправлення на базову станцію запиту для заборони створення інтерфейсу Х2 в сусідній стільник або групу стільників; і пам'ять, з'єднану з процесором для збереження даних. 5. Пристрій за п. 1, в якому процесор також сконфігурований для відправлення в базову станцію запиту для заборони хендоверів в сусідній стільник або групу стільників. 6. Пристрій за п. 1, в якому процесор також сконфігурований для прийому від базової станції оновлень відносно сусіднього стільника або групи стільників. 7. Пристрій за п. 1, в якому процесор також сконфігурований для одержання інформації про стан зв'язку сусідів, що підтримується базовою станцією. 8. Пристрій за п. 1, в якому процесор також сконфігурований для одержання інформації про стан зв'язку сусідів з таблиці зв'язків сусідів, що підтримується базовою станцією. 9. Пристрій за п. 1, в якому процесор також сконфігурований для відправлення одного або більше пріоритетів в базову станцію для створення інтерфейсу Х2 в сусідній стільник або групу стільників. 10. Машиночитаний носій, що містить: код для визначення, додавати або усувати зв'язок сусідів на основі, щонайменше частково, інформації, асоційованої з операційною і керуючою системою; код для відправлення з операційної і керуючої системи запиту на додавання або усунення в базову станцію; при цьому визначення основане на кількості разів, яку сусідній стільник повідомлявся або не повідомлявся у звіті про керування протягом фіксованого часового інтервалу. 11. Машиночитаний носій, який містить код для: визначення, додавати або усувати зв'язок сусідів на основі, щонайменше частково, інформації, асоційованої з операційною і керуючою системою; відправлення з операційної і керуючої системи запиту на додавання або усунення в базову станцію; і передачу запиту на заборону створення інтерфейсу Х2 в сусідній стільник або групу стільників. 12. Машиночитаний носій за п. 10, який також містить код для передачі запиту на заборону хендоверів в сусідній стільник або групу стільників. 13. Машиночитаний носій, який містить код для: визначення, додавати або усувати зв'язок сусідів на основі, щонайменше частково, інформації, асоційованої з операційною і керуючою системою; 15 UA 103615 C2 5 10 відправлення з операційної і керуючої системи запиту на додавання або усунення в базову станцію; і передачу запиту для заборони усунення зв'язку з таблиці зв'язків сусідів, що підтримується базовою станцією. 14. Машиночитаний носій за п. 10. який також містить код для прийому оновлень від базової станції, при цьому оновлення стосуються сусіднього стільника. 15. Машиночитаний носій за п. 10, який також містить код для запиту з таблиці зв'язків сусідів, що підтримується базовою станцією, інформації про стан зв'язку сусідів. 16. Машиночитаний носій за п. 10, який також містить код для передачі інформації пріоритету для створення інтерфейсу Х2 в сусідній стільник. 16 UA 103615 C2 17 UA 103615 C2 18 UA 103615 C2 19 UA 103615 C2 20 UA 103615 C2 21 UA 103615 C2 22 UA 103615 C2 23 UA 103615 C2 24 UA 103615 C2 25 UA 103615 C2 Комп’ютерна верстка В. Мацело Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 26
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod and apparatus for management of automatic neighbor relation function in wireless networks
Автори англійськоюCatovic, Amer, Chevallier, Christophe, Pica, Francesco, Dills, Jay, F., Tripathi, Manish, Mittal, Mukesh, K., Saglam, Mustafa, Patil, Sunil, S.
Автори російськоюКатович Амер
МПК / Мітки
МПК: H04W 36/08
Мітки: керування, мережах, бездротових, пристрій, сусідів, автоматичного, зв'язку, функцією, спосіб
Код посилання
<a href="https://ua.patents.su/28-103615-sposib-i-pristrijj-dlya-keruvannya-funkciehyu-avtomatichnogo-zvyazku-susidiv-v-bezdrotovikh-merezhakh.html" target="_blank" rel="follow" title="База патентів України">Спосіб і пристрій для керування функцією автоматичного зв’язку сусідів в бездротових мережах</a>
Спосіб і пристрій для вироблення нового ключа при передачі обслуговування в бездротових мережах
Номер патенту: 93791
Опубліковано: 10.03.2011
Автор: Вандервін Мікаела
МПК: H04Q 5/00, H04W 12/04, H04L 12/22, H04W 92/10
Мітки: пристрій, нового, обслуговування, вироблення, спосіб, бездротових, мережах, ключа, передачі
Формула / Реферат:
1. Спосіб, який діє в точці доступу, який включає етапи, на яких:приймають перший запит від термінала доступу на встановлення захищеного сеансу зв'язку через точку доступу;відправляють повідомлення із запитом ключа пристрою аутентифікації, де повідомлення із запитом ключа включає в себе локально отриманий ідентифікатор першої точки доступу і прийнятий ідентифікатор термінала доступу; іприймають перший головний сеансовий...
Спосіб і пристрій для розв’язання проблем сліпого вузла у бездротових мережах
Номер патенту: 94368
Опубліковано: 26.04.2011
Автори: Нандагопалан Саішанкар, Абрахам Сантош, Нанда Санджив, Ванг Сяофей
Мітки: проблем, вузла, мережах, розв'язання, пристрій, бездротових, сліпого, спосіб
Формула / Реферат:
1. Спосіб бездротового зв'язку, який включає етапи:прийом пакета, що містить щонайменше один заголовок і інформацію незаголовка;декодування згаданого щонайменше одного заголовка з метою визначити, чи потрібно обробляти інформацію незаголовка;в якому прийом пакета відбувається на приймальному вузлі, і декодування згаданого щонайменше одного заголовка включає:визначення адресата пакета; іповернення до...
Пристрій підвищення якості передавання даних в бездротових мережах в зонах невпевненого прийому або з недостатньою завадостійкістю

Номер патенту: 60400
Опубліковано: 25.06.2011
Автори: Шевцова Євгенія Валеріївна, Дуднік Андрій Сергійович, Яценко Микола Миколайович, Зубарева Олена Олександрівна
МПК: H04B 7/005
Мітки: недостатньою, даних, завадостійкістю, передавання, невпевненого, пристрій, прийому, мережах, якості, бездротових, зонах, підвищення
Формула / Реферат:
Пристрій підвищення якості передавання даних в бездротових мережах в зонах невпевненого прийому або з недостатньою завадостійкістю, що містить контролер, що генерує повідомлення, в якому вказується інформація про якість сигналу, здійснюючи зворотний зв'язок, який відрізняється тим, що містить основний блок - аналізатор сигналу, який, використовуючи дані блока інтерфейсу фізичного рівня OSI, дозволяє керуючому пристрою, розташованому на...
Спосіб резервування ресурсів із забезпечення найкращої затримки для багатосегментного передавання в бездротових мережах зв’язку, що підтримують розподілений доступ
Номер патенту: 93710
Опубліковано: 10.03.2011
Автор: Чоу Чунь-Тін
МПК: H04L 12/56
Мітки: підтримують, бездротових, резервування, спосіб, багатосегментного, зв'язку, забезпечення, розподілений, ресурсів, доступ, передавання, затримки, найкращої, мережах
Формула / Реферат:
1. Спосіб (400) резервування X інтервалів (610) часу для передавання даних із пристрою-відправника (110А) у пристрій-адресат (110D) за багатосегментним маршрутом у мережі (100) зв'язку, яка включає в себе множину пристроїв (110), які здійснюють зв'язок з використанням протоколу передавання даних, що передбачає попереднє резервування, в якому використовується суперфрейм (600), що складається з множини інтервалів часу (610), який...
Система та спосіб внутрішньосмугового модема для передач даних по цифрових бездротових мережах зв’язку
Номер патенту: 99532
Опубліковано: 27.08.2012
Автори: Піч Крістіан, Вернер Марк В., Сграя Крістіан, Байк Юджин Дж., Йоеттен Крістоф А., Франк Георг, Хуан Пенцзюнь, Дуні Етан Р.
МПК: H04L 7/00, G10L 19/00, H04L 25/00, H04J 3/06
Мітки: модема, мережах, внутрішньосмугового, даних, цифрових, передач, система, зв'язку, спосіб, бездротових
Формула / Реферат:
1. Спосіб одержання немовних даних, вкладених в пакет вокодера, який включає етапи, на яких:приймають і декодують пакет вокодера;фільтрують декодований пакет вокодера доти, доки не буде виявлений сигнал синхронізації, причому фільтрація містить етапи, на яких корелюють декодований пакет вокодера із заздалегідь заданою послідовністю для генерування множини піків кореляції, і порівнюють множину піків кореляції з очікуваною...
Попередній патент: Лікарський засіб, що містить комбінацію інгібітора кінази та анти-гліпікан 3-антитіла, для лікування раку печінки
Наступний патент: Заміщені гамма-лактами як терапевтичні агенти
Випадковий патент: Спосіб оцінки ефективності корекції ліпідних порушень у ліпідах серця щурів за коразолової моделі судомного синдрому