Система контролю режиму роботи вагона-вагів доменної печі
Номер патенту: 14455
Опубліковано: 15.05.2006
Автори: Єжак Олександр Євлампійович, Івлєв Валерій Павлович, Гордієнко Володимир Анатольйович, Замуруєв Валерій Михайлович, Дрейко Олексій Іванович, Попов Валерій Євгенович, Байструченко Олександр Савелович, Петров Юрій Васильович, Крикунов Борис Петрович
Формула / Реферат
Система контролю режиму роботи вагона-вагів доменної печі, що містить блок визначення положення вагона-вагів відносно бункерів естакади, сполучений з розміщеним на вагоні-вагах контролером, встановлені на вагоні-вагах система зважування і система датчиків контролю роботи виконавчих механізмів вагона-вагів, які зв'язані з контролером, розміщений на вагоні-вагах блок передачі інформації, блок прийому інформації, взаємозв'язаний з системним блоком робочої станції, яка відрізняється тим, що блок визначення положення вагона-вагів відносно бункерів естакади виконаний у вигляді встановленого на вагоні-вагах імпульсного датчика, при цьому блоки передачі і прийому інформації виконані у вигляді радіопередавача і радіоприймача, з інтерфейсами для зв'язку з контролерами, що мають зв'язок з системним блоком робочої станції у вигляді персональних комп'ютерів.
Текст
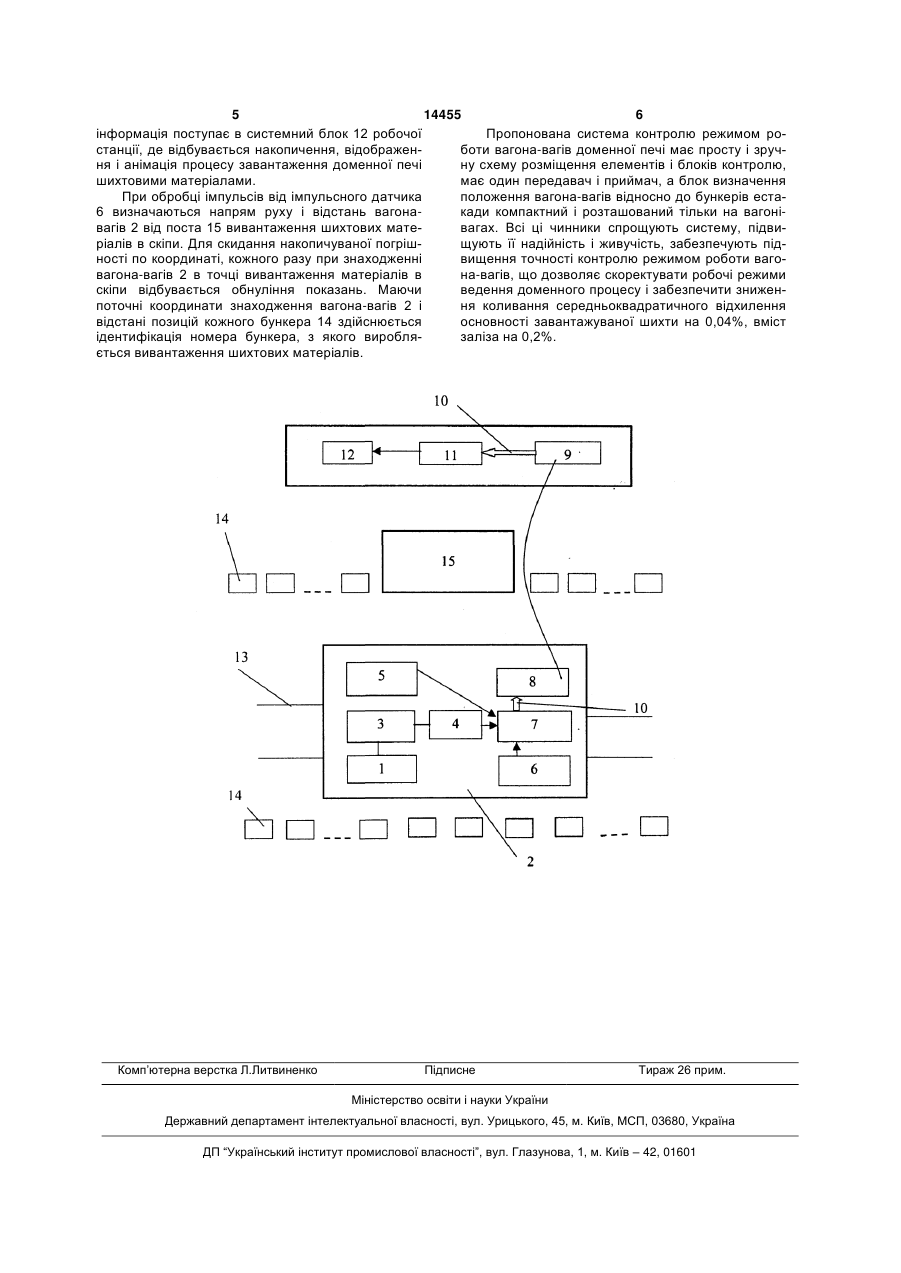
Система контролю режиму роботи вагонавагів доменної печі, що містить блок визначення положення вагона-вагів відносно бункерів естакади, сполучений з розміщеним на вагоні-вагах конт 3 14455 4 навчих механізмів вагона-вагів, які зв'язані з контнавчих механізмів вагона-вагів, які зв'язані з контролером; ролером, розміщений на вагоні-вагах блок переблок передачі інформації індуктивного типу у дачі інформації, блок прийому інформації, взаємовигляді розміщеного на вагоні-вагах передавача, зв'язаний з системним блоком робочої станції, зв'язаного з контролером і приймача, встановлезгідно корисної моделі блок визначення положенного на посту вивантаження шихтових матеріалів в ня вагона-вагів відносно до бункерів естакади вискіпи, зв'язаного з блоком прийому-передачі інфоконаний у вигляді встановленого на вагон-вагах рмації по проводах; імпульсного датчика, при цьому блоки передачі і блок прийому інформації індуктивного типу у прийому інформації виконані у вигляді радіоперевигляді розміщеного на вагоні-вагах приймача, давача і радіоприймача, з інтерфейсами для зв'яззв'язаного з контролером і передавача, встановку з контролерами, що мають зв'язок з системним леного на посту вивантаження шихтових матеріаблоком робочої станції у вигляді персональних лів в скіпи, зв'язаного з блоком прийому-передачі комп'ютерів. інформації по проводах; Структурна схема системи контролю режиму блок прийому-передачі інформації по провороботи вагона-вагів доменної печі представлена дах, що складається з модемів, розташованих на на кресленні. посту вивантаження шихтових матеріалів в скіпи і Система містить встановлену на правому і ліна центральному посту управління, ліній зв'язку вому карманах 1 вагона-вагів 2 систему зважуванміж модемами і системним блоком робочої станції ня у вигляді тензовагів 3 з вагопроцесором 4. На [Ю.М. Грачев, А.В. Спицын, Ю.В. Бочанов и др. вагоні-вагах 2 розміщені система 5 датчиків контАвтоматизированная система контроля и управролю роботи виконавчих механізмів вагона-вагів і ления режимами работы вагон-весов с поста блок визначення положення вагона-вагів відносно управления доменной печью на ОАО "ДМЗ им. до бункерів естакади, виконаний у вигляді імпульПетровского", журнал "Металлы и литье Украины", сного датчика 6 і відповідного програмного забез№3-4, 2000г., с.39 –40]. печення для обробки від нього сигналів. Тензоваги Ознаки найближчого аналога, які співпадають 3, система 5 датчиків контролю роботи виконавчих з суттєвими ознаками корисної моделі, що заявлямеханізмів вагона-вагів і імпульсний датчик 6 споється: блок визначення положення вагона-вагів лучені з мобільним контролером 7, який розміщевідносно до бункерів естакади, сполучений з розний на вагоні-вагах 2. Мобільний контролер 7 взаміщеним на вагоні-вагах контролером; встановлені ємозв'язаний зі встановленим на вагоні-вагах 2 на вагоні-вагах система зважування і система датблоком передачі інформації у вигляді радіоперечиків контролю роботи виконавчих механізмів вадавача 8, який за допомогою радіоканалу зв'язагона-вагів, які зв'язані з контролером; розміщений ний з блоком прийому інформації у вигляді радіона вагоні-вагах блок передачі інформації; блок приймача 9. Радіоприймач 9 і радіопередавач 8 прийому інформації, взаємозв'язаний з системним зв'язані за допомогою інтерфейсів 10 з управляюблоком робочої станції. чим контролером 11 і мобільним контролером 7 Відома система має складну схему, що склавідповідно. Управляючий контролер 11 зв'язаний з дається з численних датчиків і блоків прийому і системним блоком 12 робочої станції, яким є перпередачі інформації, що негативно позначається сональний комп'ютер. Вагон-ваги 2 встановлені на на точності контролю. Оскільки в системі викорисрейковому шляху 13, який розташований уздовж тані блоки передачі і прийому інформації індуктивестакади бункерів 14 з шихтовими матеріалами, ного типу, що складаються з декількох приймачів і розташованих по обох сторонах рейкового шляху. передавачів - це ускладнює обробку інформації, Між бункерами 14 розміщений пост 15 вивантащо знижує живучість системи, оскільки вихід з лаження шихтових матеріалів в скіпи. ду або збої будь-якого елементу системи привоСистема працює таким чином. дять до помилок в контролі і реєстрації параметЗгідно режиму роботи вагон-ваги 2 переміщарів, що знижує точність контролю і приводить до ються по рейковому шляху 13 і зупиняються у віддестабілізації протікання технологічного процесу повідного бункера 14 естакади. По заданій схемі доменної плавки. Крім того, наявність блоку принабору і ваги шихтових матеріалів здійснюється йому-передачі інформації по проводах також завантаження в лівий і правий кармани 1 вагонаускладнює систему в цілому. вагів 2. На мобільний контролер 7 подаються наУ основу корисної моделі поставлена задача ступні електричні сигнали: від системи 5 датчиків удосконалення системи контролю режиму роботи контролю роботи виконавчих механізмів вагонавагона-вагів доменної печі, в якій за рахунок консвагів (підйом кареток, відкриття карманів, відправтруктивних особливостей і зв'язків між ними зака скіпів, робота гальм і трансмісії), від вагопроцебезпечується спрощення системи і підвищення сорів 4 поточні показання тензовагів 3 карманів 1 і точності контролю, що приводить до стабілізації від імпульсного датчика 6. У мобільному контропротікання технологічного процесу доменної плавлері 7 електричні сигнали різного типу, що постуки. пили, перетворюються в радіосигнал, який подаПоставлена задача вирішується тим, що в сиється в радіопередавач 8 і далі по радіоканалу стемі контролю режиму роботи вагона-вагів допередається в радіоприймач 9. Одержаний сигнал менної печі, що містить блок визначення положенпередається на управляючий контролер 11, де ня вагона-вагів відносно до бункерів естакади, здійснюється основна логічна обробка всіх вхідних сполучений з розміщеним на вагоні-вагах контросигналів з урахуванням алгоритму роботи вагоналером, встановлені на вагоні-вагах система звавагів 2. В результаті в реальному масштабі часу жування і система датчиків контролю роботи виковизначається робота вагона-вагів 2. Підсумкова 5 14455 6 інформація поступає в системний блок 12 робочої Пропонована система контролю режимом ростанції, де відбувається накопичення, відображенботи вагона-вагів доменної печі має просту і зручня і анімація процесу завантаження доменної печі ну схему розміщення елементів і блоків контролю, шихтовими матеріалами. має один передавач і приймач, а блок визначення При обробці імпульсів від імпульсного датчика положення вагона-вагів відносно до бункерів еста6 визначаються напрям руху і відстань вагонакади компактний і розташований тільки на вагонівагів 2 від поста 15 вивантаження шихтових матевагах. Всі ці чинники спрощують систему, підвиріалів в скіпи. Для скидання накопичуваної погрішщують її надійність і живучість, забезпечують підності по координаті, кожного разу при знаходженні вищення точності контролю режимом роботи ваговагона-вагів 2 в точці вивантаження матеріалів в на-вагів, що дозволяє скоректувати робочі режими скіпи відбувається обнуління показань. Маючи ведення доменного процесу і забезпечити зниженпоточні координати знаходження вагона-вагів 2 і ня коливання середньоквадратичного відхилення відстані позицій кожного бункера 14 здійснюється основності завантажуваної шихти на 0,04%, вміст ідентифікація номера бункера, з якого вироблязаліза на 0,2%. ється вивантаження шихтових матеріалів. Комп’ютерна верстка Л.Литвиненко Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюA system of checking the operation mode of the blast furnace scale car
Автори англійськоюKrikunov Borys Petrovich, Zamuruiev Valerii Mykhailovych, Popov Valerii Yevhenovych, Petrov Yurii Vasyliovych, Yezhak Oleksandr Yevlampiiovych, Ivlev Valerii Pavlovych, Dreiko Oleksii Ivanovych
Назва патенту російськоюСистема контроля режима работы вагона-весов доменной печи
Автори російськоюКрикунов Борис Петрович, Замуруев Валерий Михайлович, Попов Валерий Евгеньевич, Петров Юрий Васильевич, Ежак Александр Евлампиевич, Ивлев Валерий Павлович, Дрейко Алексей Иванович
МПК / Мітки
МПК: C21B 7/24
Мітки: вагона-вагів, печі, роботи, контролю, режиму, доменної, система
Код посилання
<a href="https://ua.patents.su/3-14455-sistema-kontrolyu-rezhimu-roboti-vagona-vagiv-domenno-pechi.html" target="_blank" rel="follow" title="База патентів України">Система контролю режиму роботи вагона-вагів доменної печі</a>
Спосіб роботи доменної печі
Номер патенту: 34559
Опубліковано: 15.03.2001
Автори: Товаровський Йосип Григорович, Нечепоренко Володимир Андрійович, Севернюк Володимир Васильович, Лялюк Віталій Павлович, Зусмановський Олександр Яковлевич, Костенко Георгій Петрович, Пустоветов Сергій Васильович, Макаров Григорій Орестович
МПК: C21B 5/00
Мітки: спосіб, печі, роботи, доменної
Формула / Реферат:
Спосіб роботи доменної печі, який включає завантаження на колошник коксу, залізорудних, флюсуючих і матеріалів, що містять в собі вуглець, подачу у горн комбінованого дуття, регулювання виробництва чавуну, шлаку і колошникового газу, який відрізняється тим, що переведення роботи доменної печі з виробництва чавуну, шлаку і колошникового газу на переважне виробництво колошникового газу і шлаку при зниженні виробництва чавуну, здійснюють шляхом...
Спосіб регулювання роботи доменної печі
Номер патенту: 45801
Опубліковано: 15.04.2002
Автори: Булава Віктор Миколайович, Крутас Микола Васильович, Яриш Володимир Миколайович, Громак Генадій Анатольович
Мітки: спосіб, роботи, печі, доменної, регулювання
Формула / Реферат:
Спосіб регулювання роботи доменної печі, що включає змінювання витрат природнього газу у періоди випусків продуктів плавки і у періоди поміж випусками, який відрізняється тим, що витрати природного газу у періоди випусків продуктів плавки і у періоди поміж випусками змінюють у межах ±0,6 - ±1,2 % до витрат дуття за умови незмінності параметрів дуття зі змінюванням теоретичної температури горіння.
Спосіб регулювання роботи доменної печі
Номер патенту: 70668
Опубліковано: 15.10.2004
Автори: Фоменко Олександр Павлович, Фокін Олександр Григорович, Громак Геннадій Анатолійович, Крутас Микола Васильович, Півень Олександр Васильович, Булава Віктор Миколайович
Мітки: печі, регулювання, спосіб, доменної, роботи
Формула / Реферат:
Спосіб регулювання роботи доменної печі, що включає змінювання витрат природного газу при незмінності параметрів дуття у періоди випусків продуктів плавки і у періоди поміж випусками, який відрізняється тим, що при коливаннях атмосферного вмісту вологи змінюють витрати природного газу в залежності 1 % вологості на % природного газу у дутті.
Система контролю рівня розплаву по обводу горна доменної печі
Номер патенту: 149
Опубліковано: 30.04.1993
Автори: Сазонов Сергій Іванович, Михайлюк Геннадій Дмитрович, Первушин Сергій Іванович, Новохатський Олександр Михайлович, Дорофєєв Володимир Миколайович, Шумілов Кирилл Андрійович, Гривко Анатолій Михайлович
МПК: C21B 7/24
Мітки: рівня, доменної, система, обводу, контролю, розплаву, печі, горна
Формула / Реферат:
Формула изобретения1. Система контроля уровня расплава по окружности горна доменной печи, включающая датчики падения напряжения на кожухе доменной печи и регистрирующий прибор с блоком масштабирования, отличающаяся тем, что, с. целью повышения точности контроля уровня расплава, она снабжена устройством вычисления приращения сигналов, устройством коррекции, блоками ввода начальных условий, выбора номера летки и фиксации начала и конца...
Бункерна естакада доменної печі
Номер патенту: 62523
Опубліковано: 17.04.2006
Автори: Чорний Олександр Микитович, Маковенко Анатолій Павлович, Бичков Сергій Васильович, Аріст Леонід Михайлович, Банніков Юрій Григорович, Крівченко Юрій Сергійович
МПК: C21B 7/00
Мітки: бункерна, доменної, печі, естакада
Формула / Реферат:
Бункерна естакада доменної печі, яка містить суміщені бункери для агломерату та коксу, розташовані співвісно з доменною піччю над скіповою ямою, з'єднані грохотами та бункерними вагами з механізмами подання сировини на колошник доменної печі, бункери добавок, живильники, бункерні ваги для добавок, конвеєри та засоби видалення відсіву шихти, яка відрізняється тим, що вона обладнана ваговимірювальними бункерами відсіву агломерату та коксу,...
Попередній патент: Прилад для вимірювання деформацій пневматичної шини
Наступний патент: Стенд для дослідження роботи колеса з пневматичною шиною
Випадковий патент: Система доставки лікарського засобу