Пристрій для розробки опорно-рухового апарату людини “гарпет-надія”

Формула / Реферат
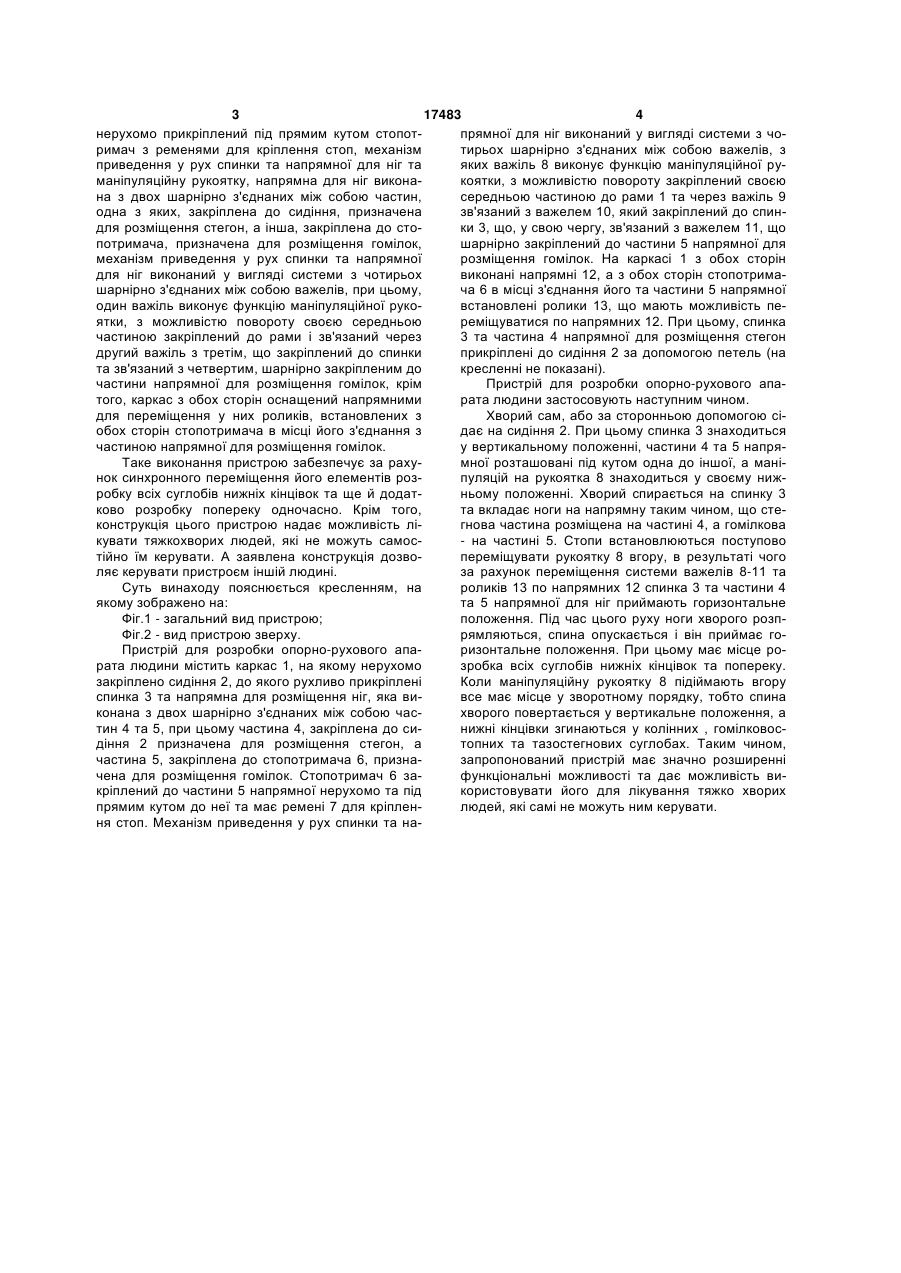
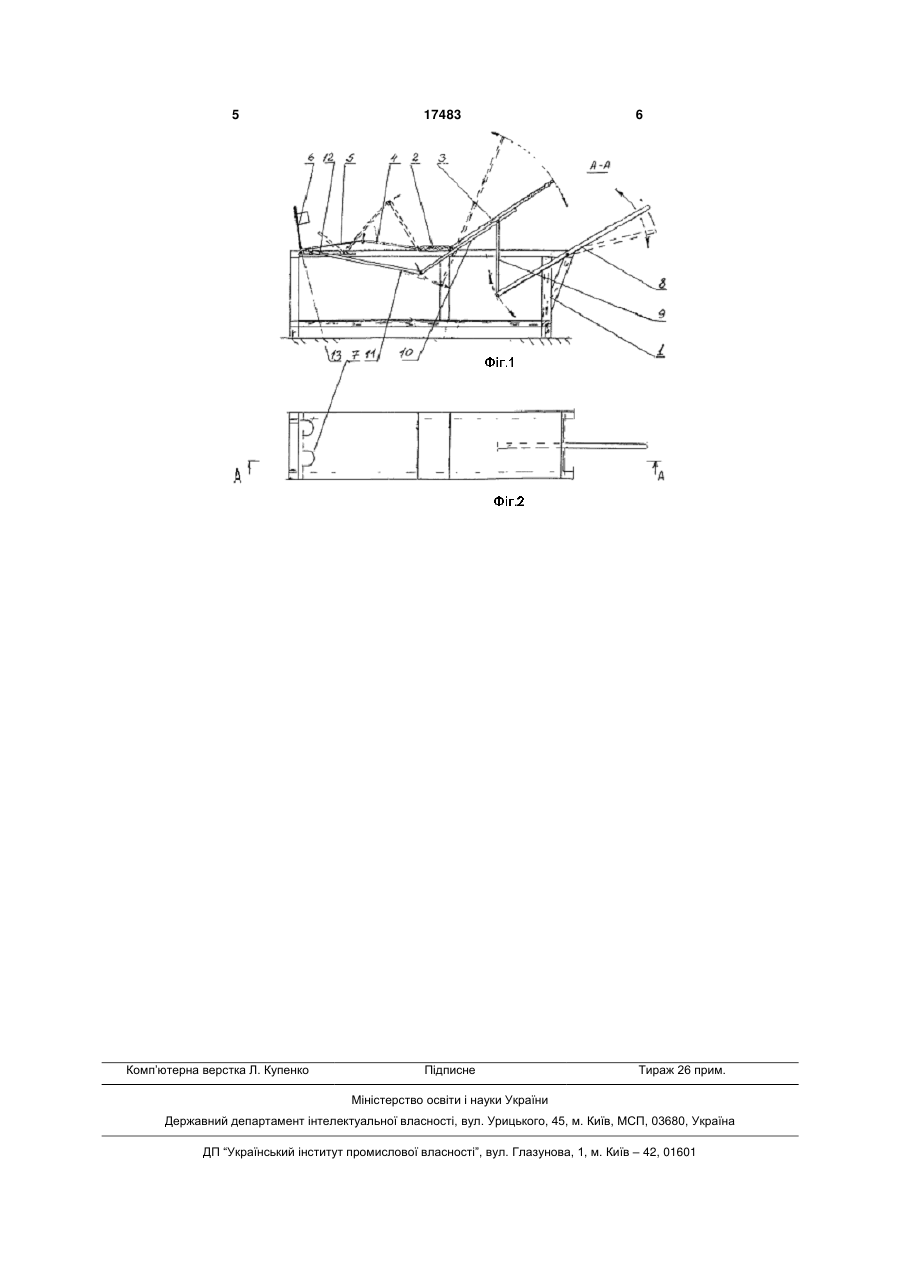
Пристрій для розробки опорно-рухового апарату людини, який містить каркас, на якому нерухомо закріплено сидіння, рухомо прикріплені до сидіння спинку та напрямну для розміщення ніг, до якої нерухомо прикріплений під прямим кутом стопотримач з ременями для кріплення стоп, механізм приведення у рух спинки та напрямної для ніг та маніпуляційну рукоятка, який відрізняється тим, що напрямна для ніг виконана з двох шарнірно з'єднаних між собою частин, одна з яких, закріплена до сидіння, призначена для розміщення стегон, а інша, закріплена до стопотримача, призначена для розміщення гомілок, механізм приведення у рух спинки та напрямної для ніг виконаний у вигляді системи з чотирьох шарнірно з'єднаних між собою важелів, при цьому один важіль виконує функцію маніпуляційної рукоятки, з можливістю повороту своєю середньою частиною закріплений до рами і зв'язаний через другий важіль з третім, що закріплений до спинки та зв'язаний з четвертим, шарнірно закріпленим до частини напрямної для розміщення гомілок, крім того, каркас з обох сторін оснащений напрямними для переміщення у них роликів, встановлених з обох сторін стопотримача в місці його з'єднання з частиною напрямної для розміщення гомілок.
Текст
Пристрій для розробки опорно-рухового апарату людини, який містить каркас, на якому нерухомо закріплено сидіння, рухомо прикріплені до сидіння спинку та напрямну для розміщення ніг, до якої нерухомо прикріплений під прямим кутом стопотримач з ременями для кріплення стоп, механізм приведення у рух спинки та напрямної для ніг та маніпуляційну рукоятка, який відрізняється тим, що напрямна для ніг виконана з двох шарнірно з'єднаних між собою частин, одна з яких, закрі 3 17483 4 нерухомо прикріплений під прямим кутом стопотпрямної для ніг виконаний у вигляді системи з чоримач з ременями для кріплення стоп, механізм тирьох шарнірно з'єднаних між собою важелів, з приведення у рух спинки та напрямної для ніг та яких важіль 8 виконує функцію маніпуляційної руманіпуляційну рукоятку, напрямна для ніг виконакоятки, з можливістю повороту закріплений своєю на з двох шарнірно з'єднаних між собою частин, середньою частиною до рами 1 та через важіль 9 одна з яких, закріплена до сидіння, призначена зв'язаний з важелем 10, який закріплений до спиндля розміщення стегон, а інша, закріплена до стоки 3, що, у свою чергу, зв'язаний з важелем 11, що потримача, призначена для розміщення гомілок, шарнірно закріплений до частини 5 напрямної для механізм приведення у рух спинки та напрямної розміщення гомілок. На каркасі 1 з обох сторін для ніг виконаний у вигляді системи з чотирьох виконані напрямні 12, а з обох сторін стопотримашарнірно з'єднаних між собою важелів, при цьому, ча 6 в місці з'єднання його та частини 5 напрямної один важіль виконує функцію маніпуляційної руковстановлені ролики 13, що мають можливість пеятки, з можливістю повороту своєю середньою реміщуватися по напрямних 12. При цьому, спинка частиною закріплений до рами і зв'язаний через 3 та частина 4 напрямної для розміщення стегон другий важіль з третім, що закріплений до спинки прикріплені до сидіння 2 за допомогою петель (на та зв'язаний з четвертим, шарнірно закріпленим до кресленні не показані). частини напрямної для розміщення гомілок, крім Пристрій для розробки опорно-рухового апатого, каркас з обох сторін оснащений напрямними рата людини застосовують наступним чином. для переміщення у них роликів, встановлених з Хворий сам, або за сторонньою допомогою сіобох сторін стопотримача в місці його з'єднання з дає на сидіння 2. При цьому спинка 3 знаходиться частиною напрямної для розміщення гомілок. у вертикальному положенні, частини 4 та 5 напряТаке виконання пристрою забезпечує за рахумної розташовані під кутом одна до іншої, а манінок синхронного переміщення його елементів розпуляцій на рукоятка 8 знаходиться у своєму нижробку всіх суглобів нижніх кінцівок та ще й додатньому положенні. Хворий спирається на спинку 3 ково розробку попереку одночасно. Крім того, та вкладає ноги на напрямну таким чином, що стеконструкція цього пристрою надає можливість лігнова частина розміщена на частині 4, а гомілкова кувати тяжкохворих людей, які не можуть самос- на частині 5. Стопи встановлюються поступово тійно їм керувати. А заявлена конструкція дозвопереміщувати рукоятку 8 вгору, в результаті чого ляє керувати пристроєм іншій людині. за рахунок переміщення системи важелів 8-11 та Суть винаходу пояснюється кресленням, на роликів 13 по напрямних 12 спинка 3 та частини 4 якому зображено на: та 5 напрямної для ніг приймають горизонтальне Фіг.1 - загальний вид пристрою; положення. Під час цього руху ноги хворого розпФіг.2 - вид пристрою зверху. рямляються, спина опускається і він приймає гоПристрій для розробки опорно-рухового апаризонтальне положення. При цьому має місце рората людини містить каркас 1, на якому нерухомо зробка всіх суглобів нижніх кінцівок та попереку. закріплено сидіння 2, до якого рухливо прикріплені Коли маніпуляційну рукоятку 8 підіймають вгору спинка 3 та напрямна для розміщення ніг, яка вивсе має місце у зворотному порядку, тобто спина конана з двох шарнірно з'єднаних між собою часхворого повертається у вертикальне положення, а тин 4 та 5, при цьому частина 4, закріплена до синижні кінцівки згинаються у колінних , гомілковосдіння 2 призначена для розміщення стегон, а топних та тазостегнових суглобах. Таким чином, частина 5, закріплена до стопотримача 6, призназапропонований пристрій має значно розширенні чена для розміщення гомілок. Стопотримач 6 зафункціональні можливості та дає можливість викріплений до частини 5 напрямної нерухомо та під користовувати його для лікування тяжко хворих прямим кутом до неї та має ремені 7 для кріпленлюдей, які самі не можуть ним керувати. ня стоп. Механізм приведення у рух спинки та на 5 Комп’ютерна верстка Л. Купенко 17483 6 Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюGarpet-nadiia device for training locomotor system
Назва патенту російськоюУстройство для разработки опорно-двигательного аппарата человека "гарпет-надия"
МПК / Мітки
Мітки: опорно-рухового, людини, розробки, пристрій, апарату, гарпет-надія
Код посилання
<a href="https://ua.patents.su/3-17483-pristrijj-dlya-rozrobki-oporno-rukhovogo-aparatu-lyudini-garpet-nadiya.html" target="_blank" rel="follow" title="База патентів України">Пристрій для розробки опорно-рухового апарату людини “гарпет-надія”</a>
Тренажер для тренування м’язів і розробки суглобів опорно-рухового апарату
Номер патенту: 47146
Опубліковано: 17.06.2002
Автори: Похиленко Сергій Володимирович, Похиленко Володимир Яковлевич
МПК: A61H 1/02
Мітки: розробки, тренування, опорно-рухового, м'язів, тренажер, апарату, суглобів
Формула / Реферат:
Тренажер для тренування м'язів і розробки суглобів опорно-рухового апарата, що містить станину з рухомими горизонтальними осями, на яких з внутрішніх боків закріплені педалі, а з зовнішнього боку закріплені диски з противагами, крім того, тренажер забезпечений пристроєм для ручного приводу педалей з кронштейнами, важелями і блокувальною рукояткою, який відрізняється тим, що додатково на загальній рамі у центральній її частині встановлено...
Спосіб непрямої оцінки функціонального стану опорно-рухового апарату людини
Номер патенту: 62170
Опубліковано: 15.12.2003
Автори: Левшин Олександр Анатолійович, Мітелев Дмитро Анатолійович, Суббота Ігор Анатолійович, Тяжелов Олексій Алимович, Радченко Володимир Олександрович, Карпінський Михайло Юрійович
МПК: A61B 5/103
Мітки: стану, оцінки, опорно-рухового, апарату, функціонального, людини, непрямо, спосіб
Формула / Реферат:
Спосіб непрямої оцінки функціонального стану опорно-рухового апарату людини, що заснований на розташуванні пацієнта на статографі, виконанні пацієнтом на ньому першого кроку, реєстрації статограми першого кроку та наступному її аналізі, який відрізняється тим, що на статограмі наносять лінію, яка проходить через точку початку руху і паралельна проекції фронтальної площини, визначають взаємне розташування криволінійного відрізка траєкторії...
Спосіб непрямої оцінки функціонального стану опорно-рухового апарату людини
Номер патенту: 58892
Опубліковано: 15.08.2003
Автори: Радченко Володимир Олександрович, Карпінський Михайло Юрійович, Рябов Олег Валентинович, Суббота Ігор Анатолійович, Мітелев Дмитро Анатолійович
МПК: A61B 5/103
Мітки: непрямо, стану, апарату, спосіб, людини, опорно-рухового, функціонального, оцінки
Формула / Реферат:
Спосіб непрямої оцінки функціонального стану опорно-рухового апарату людини, що заснований на отриманні статограм при двохопорному стоянні та стоянні з переважною опорою на кожну з нижніх кінцівок із наступним порівняльним аналізом проекцій загального центра мас на площині опори при одноопорному стоянні на правій та лівій кінцівках відносно сагітальної площини, яка проходить через центр проекції загального центра мас при двохопорному стоянні,...
Спосіб непрямого виявлення осередку ураження, наприклад опорно-рухового апарату людини
Номер патенту: 67108
Опубліковано: 15.06.2004
Автори: Яковенчук Наталія Миколаївна, Хвисюк Олександр Миколайович, Карпінський Михайло Юрійович, Суббота Ігор Анатолійович, Бірюков Андрій Андрійович
МПК: A61B 5/05
Мітки: апарату, осередку, непрямого, спосіб, виявлення, ураження, людини, наприклад, опорно-рухового
Формула / Реферат:
Спосіб непрямого визначення осередку ураження, наприклад опорно-рухового апарату людини, що включає пальпацію відповідних ділянок тіла та реєстрацію больового відчуття, який відрізняється тим, що пацієнта перед визначенням розташовують на статографі, реєструють спочатку фонову криву коливань загального центра його ваги без пальпації у фронтальній та сагітальній площинах, а потім - криву коливань загального центра ваги при пальпації...
Пристрій для користувачів з наслідками ураження центральної нервової системи та/або пошкодженнями опорно-рухового апарату тіла
Номер патенту: 72809
Опубліковано: 15.04.2005
Автори: Чугунов Віталій Вікторовіч, Авєрьянов Андрєй Ігорєвіч, Сємьонова Ксенія Алєксандровна
Мітки: нервової, ураження, користувачів, центральної, системі, апарату, тіла, пошкодженнями, наслідками, опорно-рухового, пристрій
Формула / Реферат:
1. Пристрій для користувачів з наслідками ураження центральної нервової системи та/або ушкодженням опорно-рухового апарату тіла, що має: реклінатор (1), розташований у верхній ділянці тіла користувача й пристосований для розведення надпліч та приведення лопаток до хребта; засіб корекції середньої ділянки тіла користувача, розташований на ділянці попереку; принаймні один засіб (16) корекції стегна та гомілки нижньої кінцівки, виконаний з...
Попередній патент: Спосіб збереження автомобіля на лоджії
Наступний патент: Плуг дисковий оборотний
Випадковий патент: [4-(5-амінометил-2-фторфеніл)-піперидин-1-іл]-[7-фтор-1-(2-метоксіетил)-4-трифторметоксі-1н-індол-3-іл]-метанон як інгібітор триптази тучних клітин