Автоматизована система контролю
Номер патенту: 21000
Опубліковано: 15.02.2007
Автори: Кошовий Микола Дмитрович, Сіроклин Віталій Павлович, Дергачова Ганна Володимирівна, Цеховський Максим Володимирович
Формула / Реферат
Автоматизована система контролю, що містить об’єкт контролю, блок пам’яті, схему порівняння, вихідну шину, яка відрізняється тим, що містить датчик переміщення, параметричний датчик, два двійкові лічильники, другий і третій блоки пам’яті, другу схему порівняння, елемент АБО, два елементи затримки, елемент І, формувач імпульсів, перетворювач, причому вихід датчика переміщення з’єднаний з рахунковим входом першого двійкового лічильника та через перший елемент затримки з першим входом елемента І, виходи першого двійкового лічильника з’єднані з інформаційними входами першого блока пам’яті та адресними входами другого та третього блоків пам’яті, виходи другого блока пам’яті з’єднані з першою групою входів першої схеми порівняння, виходи третього блока пам’яті з’єднані з першою групою входів другої схеми порівняння, виходи параметричного датчика через перетворювач з’єднані з другими групами входів схем порівняння, виходи яких з’єднані з входами елемента АБО, вихід елемента АБО з’єднаний з другим входом елемента І, вихід якого з’єднаний через формувач імпульсів з рахунковим входом другого двійкового лічильника та через другий елемент затримки з входом запису першого блока пам’яті, виходи другого двійкового лічильника з’єднані з адресними входами першого блока пам’яті та виxiднoю шиною.
Текст
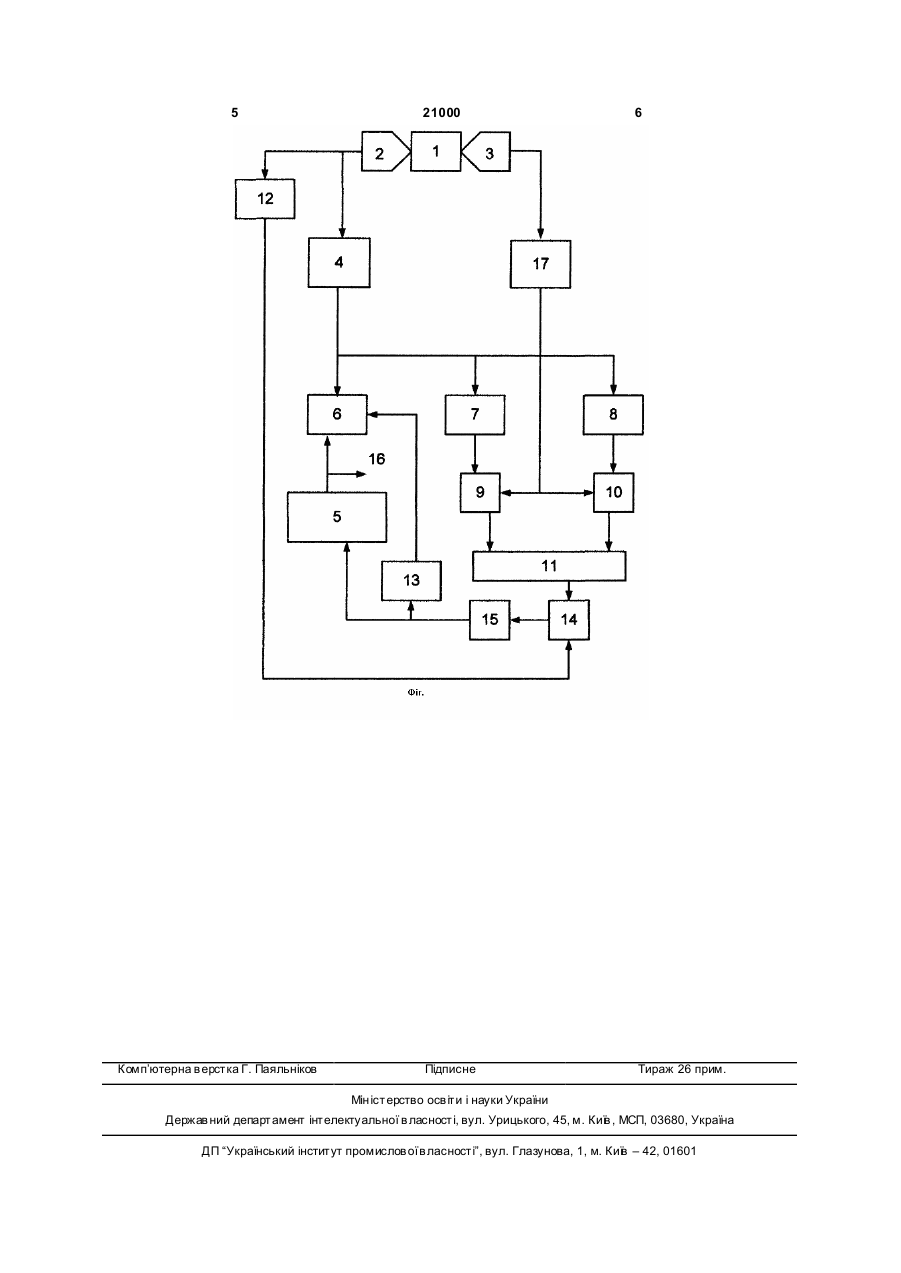
Автоматизована система контролю, що містить об’єкт контролю, блок пам’яті, схему порівняння, вихідну шин у, яка відрізняється тим, що містить датчик переміщення, параметричний датчик, два двійкові лічильники, другий і третій блоки пам’яті, другу схему порівняння, елемент АБО, два елементи затримки, елемент І, формувач імпульсів, перетворювач, причому вихід датчика переміщення з’єднаний з рахунковим входом першого двійкового лічильника та через перший елемент 3 21000 4 вдосконалення автоматизованої системи контротього блоків пам’яті 7 та 8, виходи др угого блока лю шляхом введення нового складу елементів, та пам’яті 7 з’єднані з першою групою входів першої нової організації взаємозв’язків між ними. забезпесхеми порівняння 9, виходи третього блока пам’яті чити розширення функціональних можливостей. 10 з’єднані з першою групою входів др угої схеми Поставлене завдання вирішується тим, що авпорівняння 10, виходи параметричного датчика 3 томатизована система контролю, яка має об’єкт через перетворювач 17 з’єднані з другими групами контролю, блок пам’яті, схему порівняння, вихідну входів схем порівняння 9 та 10, виходи яких шину, містить датчик переміщення, параметричз’єднані з входами елемента АБО 11, вихід елемений датчик, два двійкові лічильники, другий і третій нта АБО 11 з’єднаний з другим входом елемента 1 блоки пам’яті, другу схему порівняння, елемент 14, вихід якого з’єднаний через формувач імпульАБО, два елементи затримки, елемент І, формусів 15 з рахунковим входом другого двійкового вач імпульсів, перетворювач, причому вихід датлічильника 5 та через другий елемент затримки 13 чика переміщення з’єднаний з рахунковим входом з входом запису першого блока пам’яті 6, виходи першого двійкового лічильника та через перший другого двійкового лічильника 5 з’єднані з адреселемент затримки з першим входом елемента І, ними входами першого блока пам’яті 6 та вихідвиходи першого двійкового лічильника з’єднані з ною шиною 16. інформаційними входами першого блока пам’яті, Працює система у такий спосіб. та адресними входами другого та третього блоків Автоматизована система контролю призначепам’яті, виходи другого блока пам’яті з’єднані з на для визначення значень параметрів у контропершою групою входів першої схеми порівняння, льних точках та виявлення відхилень від верхньої, виходи третього блока пам’яті з’єднані з першою або нижньої межи значень. Контроль проводиться групою входів другої схеми порівняння, виходи у процесі переміщення об’єкта контролю відносно параметричного датчика через перетворювач датчиків, або навпаки, в залежності від виду объез’єднані з другими групами входів схем порівнянкта контролю. В процесі переміщення датчик пеня, виходи яких з’єднані з входами елемента АБО, реміщення формує послідовність імпульсів, кільвихід елемента АБО з’єднаний з другим входом кість яких пропорційна зміщенню об’єкта контролю елемента І, вихід якого з’єднаний через формувач відносно початку вимірювань. Імпульси з виходу імпульсів з рахунковим входом другого двійкового датчика переміщення 2 поступають на рахунковий лічильника та через другий елемент затримки з вхід двійкового лічильника 4, стан якого відповідає входом запису першого блока пам’яті, виходи друдвійковому коду номеру контрольної точки. У прогого двійкового лічильника з’єднані з адресними цесі переміщення об’єкта контролю для кожної входами першого блока пам’яті та вихідною шиконтрольної точки відповідно з її номером на виною. ходах блоків пам’яті 7 і 8 формуються межи знаЗаявлена система має новий склад елементів, чення параметру у точці, що розглядається. Схема та нову організацію взаємозв’язків між ними, тобто порівняння 9 порівнює значення параметру з нижмістить нову сукупність ознак, які забезпечують ньою межею значення, а схема порівняння 10 - з нові технічні властивості системи. Технічний реверхньою. Якщо значення параметру виходить за зультат, як наслідок цих властивостей - розширенмежи, то на виходах відповідних схем порівняння ня функціональних можливостей системи, а саме формується сигнал „І”, який через елемент 14 І контролювати значення параметрів. при наявності імпульсу з елемента затримки 12 На Фіг.1 представлена функціональна схема поступає на рахунковий вхід двійкового лічильника системи. 5, збільшуючи його стан на одиницю. Через потріАвтоматизована система контролю, що місбний для зміни стану двійкового лічильника 5 час тить об’єкт контролю 1, датчик переміщення 2, приходить імпульс з виходу елемента затримки 13 параметричний датчик 3, два двійкові лічильники 4 на вхід запису блока пам’яті 6 і інформація з його та 5, блоки пам’яті 6, 7, 8, схеми порівняння 9 та інформаційних входів про номер контрольної точ10, елемент АБО 11, два елементи затримки 12 та ки, у якій параметр виходить за допустимі значен13, елемент І 14, формувач імпульсів 15, вихідну ня, записується. Вказаний процес виконується для шину 16, перетворювач 17, причому вихід датчика усі х контрольних точок. По його закінченні на вихіпереміщення 2 з’єднаний з рахунковим входом дній шині 16 сформована кількість контрольних першого двійкового лічильника 4, та через перший точок, у яких параметр виходить за допустиму меелемент затримки 12 з першим входом елемента жу. Таким чином, у процесі контролю записуються 114, виходи першого двійкового лічильника 4 усі номера контрольних точок, у якій параметр з’єднані з інформаційними входами першого блока виходить за допустимі значення, а у блоці пам’яті пам’яті 6, та адресними входами другого та тре6 записані їх номера. 5 Комп’ютерна в ерстка Г. Паяльніков 21000 6 Підписне Тираж 26 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюAutomated monitoring system
Автори англійськоюKoshovyi Mykola Dmytrovych, Tsekhovskyi Maksym Volodymyrovych, Siroklyn Vitalii Pavlovych
Назва патенту російськоюАвтоматизированная система контроля
Автори російськоюКошевой Николай Дмитриевич, Цеховский Максим Владимирович, Сироклин Виталий Павлович
МПК / Мітки
МПК: G06F 11/30
Мітки: автоматизована, контролю, система
Код посилання
<a href="https://ua.patents.su/3-21000-avtomatizovana-sistema-kontrolyu.html" target="_blank" rel="follow" title="База патентів України">Автоматизована система контролю</a>
Автоматизована система контролю
Номер патенту: 60890
Опубліковано: 15.10.2003
Автор: Кучмієв Володимир Гавриїлович
МПК: G06F 11/30
Мітки: контролю, автоматизована, система
Формула / Реферат:
Автоматизована система контролю, що містить шину вхідних даних, об'єкт контролю, шину вихідних даних, схему порівняння, причому шина вхідних даних з'єднана з входами об'єкта контролю, виходи якого з'єднані з шиною вихідних даних, яка відрізняється тим, що має перший та другий формувачі настройок, блок керування, перший та другий універсальні алгоритмічні перетворювачі, запам'ятовуючий пристрій, причому шина вхідних даних з'єднана з першою...
Автоматизована система для проведення багатофакторного експерименту
Номер патенту: 18907
Опубліковано: 15.11.2006
Автори: Дергачова Ганна Володимирівна, Цеховський Максим Володимирович, Кошовий Микола Дмитрович, Сіроклин Віталій Павлович, Світличний Олександр Володимирович
МПК: G06F 17/00
Мітки: система, експерименту, багатофакторного, автоматизована, проведення
Формула / Реферат:
Автоматизована система для проведення багатофакторного експерименту, що містить елемент І, елемент HI, двійковий лічильник, керуючий вхід, інформаційний вихід, блок пам'яті, генератор імпульсів, елемент затримки, детектор фронту, виходи значень рівнів факторів, причому вихід елемента HI з'єднаний з першим входом елемента І, вихід якого з'єднаний з підсумовуючим входом двійкового лічильника, вихід переносу двійкового лічильника з'єднаний з...
Автоматизована система пошуку оптимального покриття
Номер патенту: 20835
Опубліковано: 15.02.2007
Автори: Чумаченко Ігор Володимирович, Шипулін Олексій Ігорович, Доценко Наталія Володимирівна, Дергачова Ганна Володимирівна
МПК: G06F 17/00
Мітки: оптимального, покриття, автоматизована, система, пошуку
Формула / Реферат:
Автоматизована система пошуку оптимального покриття, що містить двійковий лічильник, блок пам'яті, виходи результату, групу інформаційних входів, два виходи пристрою, керуючий вхід, елемент І, причому виходи двійкового лічильника з'єднані з адресними входами блока пам'яті, групу керуючих входів, яка відрізняється тим, що містить k груп керуючих входів, k блоків множення векторів, k порогових елементів, блок керування, виходи рішень, причому...
Автоматизована система для проведення багатофакторного експерименту
Номер патенту: 45845
Опубліковано: 15.04.2002
Автори: Бестань Сергій Генадійович, Доценко Наталія Володимирівна, Кошовий Олег Миколайович, Кошовий Микола Дмитрович
МПК: G06F 17/00
Мітки: автоматизована, система, проведення, багатофакторного, експерименту
Формула / Реферат:
1. Автоматизована система для проведення багатофакторного експерименту, яка має елемент І, елемент НІ, двійковий лічильник, керуючий вхід, інформаційний вихід, блок пам'яті, причому вихід елемента НІ з'єднаний з першим входом елемента І, вихід якого з'єднаний з підсумовуючим входом двійкового лічильника, виходи двійкового лічильника з'єднані з адресними входами блока пам'яті, вихід переносу двійкового лічильника з'єднаний з інформаційним...
Відмовостійка система з аналізом ресурсу
Номер патенту: 15201
Опубліковано: 15.06.2006
Автори: Кулік Анатолій Степанович, Дергачов Володимир Андрійович, Кулік Тамара Васильовна
МПК: G06F 11/18
Мітки: відмовостійка, ресурсу, аналізом, система
Формула / Реферат:
Відмовостійка система з аналізом ресурсу, яка має блоки, що резервуються, елементи нерівнозначності, елементи І, пороговий елемент, вихід системи, перший двійковий лічильник, перший і другий елементи АБО, n детекторів фронту, n детекторів спаду, виходи індикації технічного стану, причому вихід і-го блока, що резервується, з'єднаний з першим входом і-го елемента I, вихід і-го елемента нерівнозначності з'єднаний з другим входом і-го елемента І,...
Попередній патент: Пристрій для безконтактного вимірювання температури
Наступний патент: Автоматизована система контролю якості покриття
Випадковий патент: Пристрій для фіксації плоских елементів