Витратомір сипких речовин
Формула / Реферат
Витратомір сипких речовин, що містить вимірювальне колесо з радіальними лопатями (1), яке приводиться у обертання асинхронним електричним двигуном (2), перетворювач моменту (3), який перетворює момент, пропорційний масовим витратам сипкої речовини, у електричний сигнал, вимірювальний прилад (4), що обробляє та візуалізує сигнал з перетворювача моменту, який відрізняється тим, що швидкість обертання асинхронного двигуна (2) стабілізується системою керування, яка реалізує векторний алгоритм керування без використання вимірювальних перетворювачів частоти обертання та складається з блока керування (5), блока вимірювання (6) та перетворювача частоти (7).
Текст
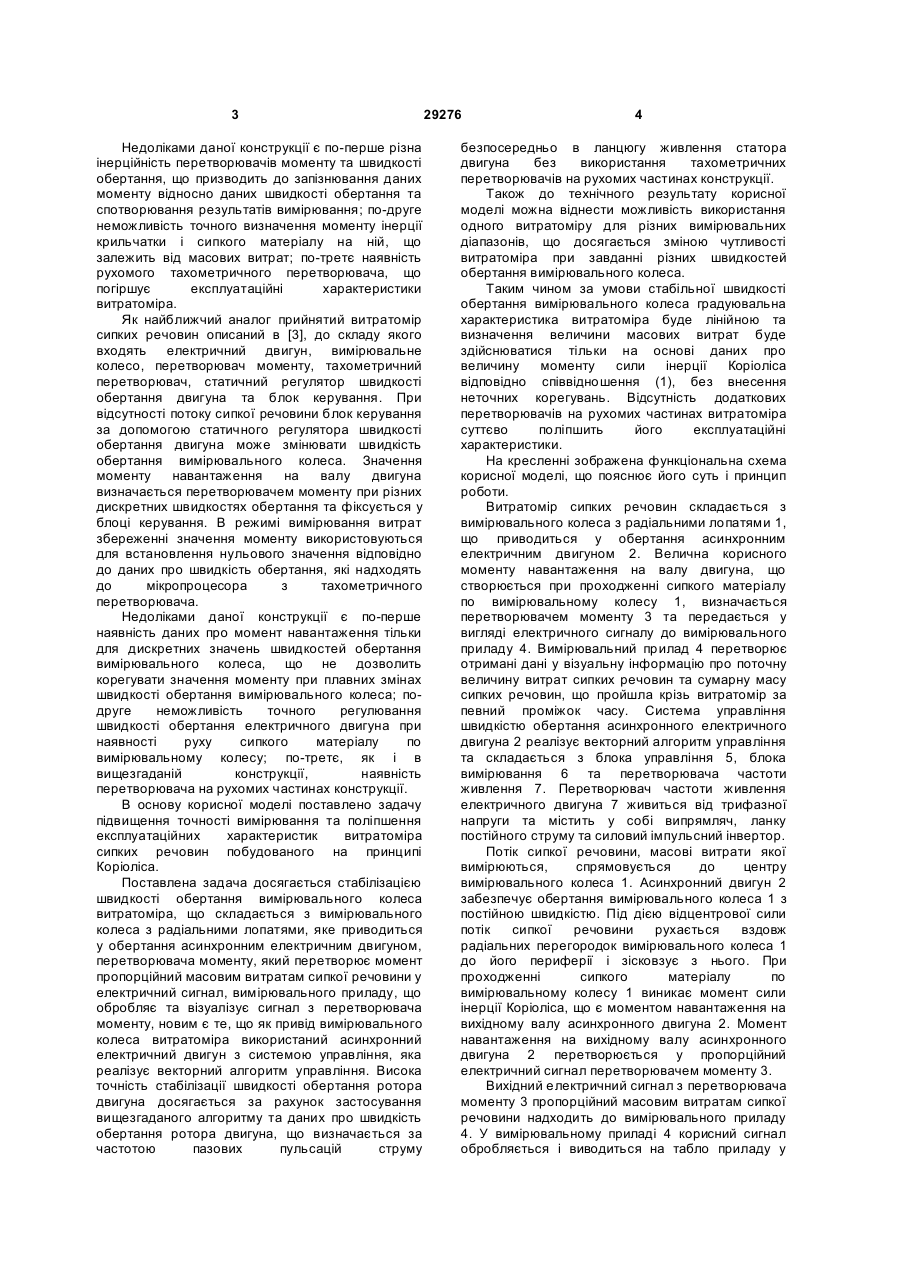
Витратомір сипких речовин, що містить вимірювальне колесо з радіальними лопатями (1), яке приводиться у обертання асинхронним електричним двигуном (2), перетворювач моменту 3 Недоліками даної конструкції є по-перше різна інерційність перетворювачів моменту та швидкості обертання, що призводить до запізнювання даних моменту відносно даних швидкості обертання та спотворювання результатів вимірювання; по-друге неможливість точного визначення моменту інерції крильчатки і сипкого матеріалу на ній, що залежить від масових витрат; по-третє наявність рухомого тахометричного перетворювача, що погіршує експлуатаційні характеристики витратоміра. Як найближчий аналог прийнятий витратомір сипких речовин описаний в [3], до складу якого входять електричний двигун, вимірювальне колесо, перетворювач моменту, тахометричний перетворювач, статичний регулятор швидкості обертання двигуна та блок керування. При відсутності потоку сипкої речовини блок керування за допомогою статичного регулятора швидкості обертання двигуна може змінювати швидкість обертання вимірювального колеса. Значення моменту навантаження на валу двигуна визначається перетворювачем моменту при різних дискретних швидкостях обертання та фіксується у блоці керування. В режимі вимірювання витрат збереженні значення моменту використовуються для встановлення нульового значення відповідно до даних про швидкість обертання, які надходять до мікропроцесора з тахометричного перетворювача. Недоліками даної конструкції є по-перше наявність даних про момент навантаження тільки для дискретних значень швидкостей обертання вимірювального колеса, що не дозволить корегувати значення моменту при плавних змінах швидкості обертання вимірювального колеса; подруге неможливість точного регулювання швидкості обертання електричного двигуна при наявності руху сипкого матеріалу по вимірювальному колесу; по-третє, як і в вищезгаданій конструкції, наявність перетворювача на рухомих частинах конструкції. В основу корисної моделі поставлено задачу підвищення точності вимірювання та поліпшення експлуатаційних характеристик витратоміра сипких речовин побудованого на принципі Коріоліса. Поставлена задача досягається стабілізацією швидкості обертання вимірювального колеса витратоміра, що складається з вимірювального колеса з радіальними лопатями, яке приводиться у обертання асинхронним електричним двигуном, перетворювача моменту, який перетворює момент пропорційний масовим витратам сипкої речовини у електричний сигнал, вимірювального приладу, що обробляє та візуалізує сигнал з перетворювача моменту, новим є те, що як привід вимірювального колеса витратоміра використаний асинхронний електричний двигун з системою управління, яка реалізує векторний алгоритм управління. Висока точність стабілізації швидкості обертання ротора двигуна досягається за рахунок застосування вищезгаданого алгоритму та даних про швидкість обертання ротора двигуна, що визначається за частотою пазових пульсацій струму 29276 4 безпосередньо в ланцюгу живлення статора двигуна без використання тахометричних перетворювачів на рухомих частинах конструкції. Також до технічного результату корисної моделі можна віднести можливість використання одного витратоміру для різних вимірювальних діапазонів, що досягається зміною чутливості витратоміра при завданні різних швидкостей обертання вимірювального колеса. Таким чином за умови стабільної швидкості обертання вимірювального колеса градуювальна характеристика витратоміра буде лінійною та визначення величини масових витрат буде здійснюватися тільки на основі даних про величину моменту сили інерції Коріоліса відповідно співвідношення (1), без внесення неточних корегувань. Відсутність додаткових перетворювачів на рухомих частинах витратоміра суттєво поліпшить його експлуатаційні характеристики. На кресленні зображена функціональна схема корисної моделі, що пояснює його суть і принцип роботи. Витратомір сипких речовин складається з вимірювального колеса з радіальними лопатями 1, що приводиться у обертання асинхронним електричним двигуном 2. Велична корисного моменту навантаження на валу двигуна, що створюється при проходженні сипкого матеріалу по вимірювальному колесу 1, визначається перетворювачем моменту 3 та передається у вигляді електричного сигналу до вимірювального приладу 4. Вимірювальний прилад 4 перетворює отримані дані у візуальну інформацію про поточну величину витрат сипких речовин та сумарну масу сипких речовин, що пройшла крізь витратомір за певний проміжок часу. Система управління швидкістю обертання асинхронного електричного двигуна 2 реалізує векторний алгоритм управління та складається з блока управління 5, блока вимірювання 6 та перетворювача частоти живлення 7. Перетворювач частоти живлення електричного двигуна 7 живиться від трифазної напруги та містить у собі випрямляч, ланку постійного струму та силовий імпульсний інвертор. Потік сипкої речовини, масові витрати якої вимірюються, спрямовується до центру вимірювального колеса 1. Асинхронний двигун 2 забезпечує обертання вимірювального колеса 1 з постійною швидкістю. Під дією відцентрової сили потік сипкої речовини рухається вздовж радіальних перегородок вимірювального колеса 1 до його периферії і зісковзує з нього. При проходженні сипкого матеріалу по вимірювальному колесу 1 виникає момент сили інерції Коріоліса, що є моментом навантаження на вихідному валу асинхронного двигуна 2. Момент навантаження на вихідному валу асинхронного двигуна 2 перетворюється у пропорційний електричний сигнал перетворювачем моменту 3. Вихідний електричний сигнал з перетворювача моменту 3 пропорційний масовим витратам сипкої речовини надходить до вимірювального приладу 4. У вимірювальному приладі 4 корисний сигнал обробляється і виводиться на табло приладу у 5 вигляді масових витрат в заданих одиницях вимірювання. Також вимірювальний прилад 4 виконує операцію інтегрування та виводить на табло дані про масу сипкої речовини, що пройшла крізь витратомір за певний проміжок часу. Постійна швидкість обертання вихідного вала асинхронного електродвигуна 2 забезпечується системою управління, що складається з блоку управління 5, блоку вимірювання 6 та перетворювача частоти 7. Блок управління 5 реалізує алгоритм векторного управління частотою обертання асинхронного двигуна 2. Цей алгоритм оперує багатофазними змінними (струмами, напругами, потокозчепленнями) у формі відповідні узагальнених векторів в системі координат Парка-Горєва, яка орієнтована по одному з векторів, що входять в рівняння електромагнітного моменту. Вхідними параметрами блоку управління 5 є миттєві значення струмів, швидкість обертання ротора електродвигуна, модуль і кут вектора потокозчеплення. Значення цих параметрів надходять до блоку управління 5 з блоку вимірювання 6. Миттєві значення струмів визначаються блоком вимірювання 6 шляхом безпосереднього вимірювання струмів у двох фазах обмотки живлення електричного двигуна. Швидкість обертання ротора визначається без використання будь-якого тахометричного перетворювача на роторі двигуна або витратоміра за частотою пазових пульсацій струму статора, що виникають при проходженні пазів статора повз обмотки ротора при обертанні ротора двигуна. Модуль і кут вектора потокозчеплення також визначається в блоці вимірювання з відомих струмів та значення базової напруги з ланцюгу постійного струму перетворювача частоти 7. Блок управління 5 на основі величин отриманих з блока вимірювання 6, попередньо заданих сталих параметрів асинхронного двигуна 2 та заданої швидкості обертання здійснює управління перетворювачем частоти 7. Трифазна синусоїдальна напруга, що подається на вхід перетворювача частоти 7, перетворюється у постійну випрямлячем, який входить до складу перетворювача частоти. Після випрямлення напруга подається на фільтр для згладжування, а потім на вхід силового імпульсного інвертора, що також міститься у перетворювачі частоти 7. Управління частотою трифазної синусоїдальної напруги на виході інвертора здійснюється блоком управління 5, шляхом передачі порядку та часу комутації ключів інвертора. Значення амплітуди напруги змінного струму залежить від значення випрямленої напруги на виході випрямляча, управління яким також здійснюється блоком управління 5. Таким чином на основі даних про поточні параметри асинхронного двигуна 2, отримані від блока вимірювань 6, блок управління 5 формує на виході перетворювача частоти 7 трифазну синусоїдальну напругу такої частоти і амплітуди, щоб підтримувати швидкість обертання вихідного валу двигуна сталою на рівні заданої швидкості. При сталій швидкості обертання сигнал з 29276 6 перетворювача моменту 3 буде пропорційним масовим витратам сипкої речовини, що проходить по вимірювальному колесу 1. 1. Луткин Н.И., Морар К.К. Приборы для контроля технологического процесса в потоке. - М.: Колос. 1978 - 159с. 2. US 4821581 A1 4 G01F1/80. Method and apparatus for the continuous of bulk material passing over a measuring wheel. / G. Jost. - №94816; 18.04.1989. 3. US 6185983 B1 4 G01F1/80. Method and apparatus for automatically determining zero settings of impeller-type mass flow-rate measuring device when flow is absent / A. Soderholm, O. Soderholm. №09/024961; 13.02.2001.
ДивитисяДодаткова інформація
Назва патенту англійськоюBulk material flow rate meter
Автори англійськоюKorneva Yulia Oleksandrivna
Назва патенту російськоюРасходомер сыпучих веществ
Автори російськоюКорнева Юлия Александровна
МПК / Мітки
МПК: G01F 1/76
Мітки: витратомір, речовин, сипких
Код посилання
<a href="https://ua.patents.su/3-29276-vitratomir-sipkikh-rechovin.html" target="_blank" rel="follow" title="База патентів України">Витратомір сипких речовин</a>
Робочий орган відцентрового розкидача сипких речовин
Номер патенту: 68894
Опубліковано: 16.08.2004
Автор: Єременок Іван Васильович
МПК: A01C 17/00
Мітки: відцентрового, робочий, речовин, розкидача, сипких, орган
Формула / Реферат:
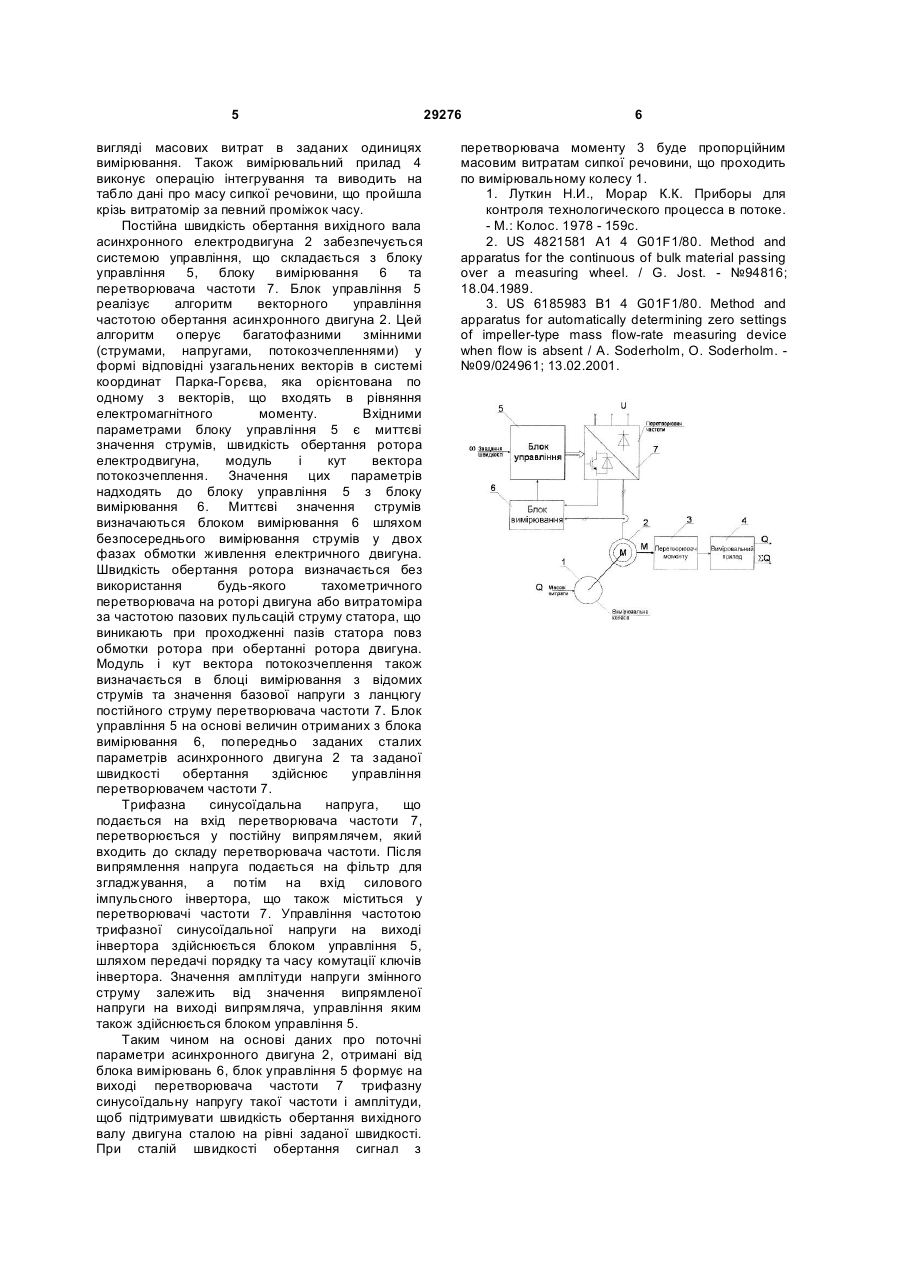
Робочий орган відцентрового розкидача сипких речовин, що містить декілька обертових зв'язаних між собою дисків з розміщеними на них прямолінійними лопатками та дозатор потоку на кожен із дисків, причому нижній диск виконаний суцільним, а верхні диски мають в центрі отвори, який відрізняється тим, що лопатки верхнього диска розміщені радіально, а лопатки нижніх дисків нахилені за напрямом обертання робочого органа із збільшенням кута нахилу...
Витратомір палива
Номер патенту: 15311
Опубліковано: 15.06.2006
Автори: Сіроклин Віталій Павлович, Іванцов Михайло Юрійович, Кошовий Микола Дмитрович, Дергачов Володимир Андрійович
МПК: G01F 1/00
Мітки: палива, витратомір
Формула / Реферат:
Витратомір палива, який містить датчик обертів двигуна, датчик крутного моменту, які через комутатор під'єднані до аналого-цифрового перетворювача, і обчислювальний пристрій з індикатором, який відрізняється тим, що додатково введено датчик температури повітря перед двигуном, під'єднаний через комутатор до аналого-цифрового перетворювача, який з'єднаний з мікропроцесорним обчислювальним пристроєм.
Турбінний витратомір
Номер патенту: 18794
Опубліковано: 15.11.2006
Автори: Ташпіков Дмитро Борисович, Савельєв Анатолій Семенович
МПК: G01F 1/00
Мітки: витратомір, турбінний
Формула / Реферат:
Турбінний витратомір, що містить корпус з каліброваним каналом, в якому на осі послідовно розміщені вхідний випрямляч струменя, основна вимірювальна турбіна і вихідний випрямляч струменя, який відрізняється тим, що пристрій містить розміщену за основною вимірювальною турбіною гідравлічно зв'язану з нею додаткову вимірювальну турбіну, ідентичну основній, і безконтактний оптичний перетворювач швидкості обертання турбін, що складається зі...
Спосіб зниження чутливості сипких водонаповнених вибухових речовин до механічних впливів
Номер патенту: 55702
Опубліковано: 15.08.2006
Автори: Прокопенко Антон Вікторович, Прокопенко Віктор Степанович, Косьмін Ігор Вікторович
МПК: C06B 31/00
Мітки: речовин, зниження, чутливості, спосіб, вибухових, механічних, водонаповнених, сипких, впливів
Формула / Реферат:
1. Гранулятор, ідо включає барабан і привід його обертання, які закріплені на рамі, установленій з можливістю хитання на опорі, і червячно-гвинтовий механізм нахилу рами, зв'язаний з опорою шарніром приводу обертання гвинта, а з рамою шарніром гайки гвинта, який відрізняється тим, що зазначені шарніри виконані у виді консольних вилок, зв'язаних, відповідно, з опорою і рамою за допомогою своїх опорних цапф, при цьому, вісь опорної цапфи вилки,...
Пристрій для малооб’ємного дозування сипких речовин
Номер патенту: 64768
Опубліковано: 15.03.2004
Автор: Молчанов Олег Володимирович
МПК: G01F 11/00, G01F 11/10
Мітки: речовин, малооб'ємного, сипких, пристрій, дозування
Формула / Реферат:
Пристрій для малооб'ємного дозування сипких речовин, що складається з витратної і мірної ємностей, який відрізняється тим, що потрібний об'єм мірної ємності утворений дисковими верхньою перегородкою і нижньою перегородкою, яка відділяє мірну ємність від витратної, при цьому вказані перегородки виконані з можливістю обертання навколо осей, які лежать у їх площинах, і почергового відкривання і закривання ними тієї чи іншої ємності зовнішнім...
Попередній патент: Енергетична установка
Наступний патент: Утилізатор
Випадковий патент: Трансформерне колесо для бімодального транспорту