Спосіб реєстрації вібрацій об`єкта в електромагнітному полі
Номер патенту: 30278
Опубліковано: 25.02.2008
Автори: Клочко Тетяна Реджинальдівна, Клочко Михайло Маркович, Скицюк Володимир Іванович
Формула / Реферат
Спосіб реєстрації вібрацій об'єкта в електромагнітному полі, що включає за наявності вібрацій об'єкта в обмотці відчутника реєстрацію зміни напруги ЕРС, величини яких пропорційні швидкості переміщення інерційного елемента відчутника, який відрізняється тим, що об'єднують індуктивні та індукційні властивості відчутника, для чого формують змінне магнітне поле, яке охоплює об'єкт та феромагнітне осереддя відчутника, що виконують з інерційного та статичного елементів, зазор між якими є залежним від амплітуди вібрацій, при цьому параметри вібрацій визначають за змінами величини розналагодження резонансної частоти відчутника.
Текст
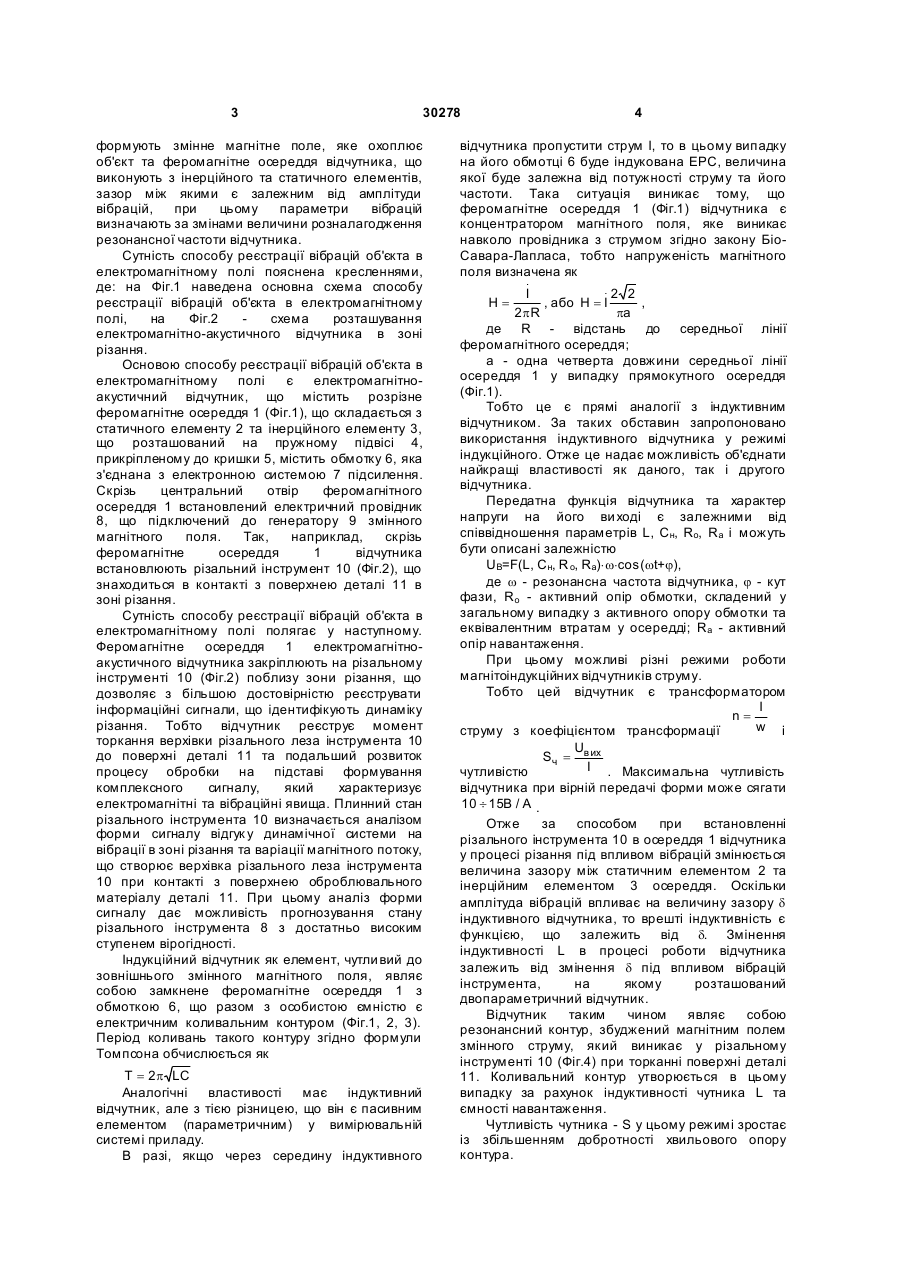
Спосіб реєстрації вібрацій об'єкта в електромагнітному полі, що включає за наявності вібрацій об'єкта в обмотці відчутника реєстрацію 3 30278 формують змінне магнітне поле, яке охоплює об'єкт та феромагнітне осереддя відчутника, що виконують з інерційного та статичного елементів, зазор між якими є залежним від амплітуди вібрацій, при цьому параметри вібрацій визначають за змінами величини розналагодження резонансної частоти відчутника. Сутність способу реєстрації вібрацій об'єкта в електромагнітному полі пояснена кресленнями, де: на Фіг.1 наведена основна схема способу реєстрації вібрацій об'єкта в електромагнітному полі, на Фіг.2 схема розташування електромагнітно-акустичного відчутника в зоні різання. Основою способу реєстрації вібрацій об'єкта в електромагнітному полі є електромагнітноакустичний відчутник, що містить розрізне феромагнітне осереддя 1 (Фіг.1), що складається з статичного елементу 2 та інерційного елементу 3, що розташований на пружному підвісі 4, прикріпленому до кришки 5, містить обмотку 6, яка з'єднана з електронною системою 7 підсилення. Скрізь центральний отвір феромагнітного осереддя 1 встановлений електричний провідник 8, що підключений до генератору 9 змінного магнітного поля. Так, наприклад, скрізь феромагнітне осереддя 1 відчутника встановлюють різальний інструмент 10 (Фіг.2), що знаходиться в контакті з поверхнею деталі 11 в зоні різання. Сутність способу реєстрації вібрацій об'єкта в електромагнітному полі полягає у наступному. Феромагнітне осереддя 1 електромагнітноакустичного відчутника закріплюють на різальному інструменті 10 (Фіг.2) поблизу зони різання, що дозволяє з більшою достовірністю реєструвати інформаційні сигнали, що ідентифікують динаміку різання. Тобто відчутник реєструє момент торкання верхівки різального леза інструмента 10 до поверхні деталі 11 та подальший розвиток процесу обробки на підставі формування комплексного сигналу, який характеризує електромагнітні та вібраційні явища. Плинний стан різального інструмента 10 визначається аналізом форми сигналу відгук у динамічної системи на вібрації в зоні різання та варіації магнітного потоку, що створює верхівка різального леза інструмента 10 при контакті з поверхнею оброблювального матеріалу деталі 11. При цьому аналіз форми сигналу дає можливість прогнозування стану різального інструмента 8 з достатньо високим ступенем вірогідності. Індукційний відчутник як елемент, чутли вий до зовнішнього змінного магнітного поля, являє собою замкнене феромагнітне осереддя 1 з обмоткою 6, що разом з особистою ємністю є електричним коливальним контуром (Фіг.1, 2, 3). Період коливань такого контуру згідно формули Томпсона обчислюється як T = 2 p LC Аналогічні властивості має індуктивний відчутник, але з тією різницею, що він є пасивним елементом (параметричним) у вимірювальній системі приладу. В разі, якщо через середину індуктивного 4 відчутника пропустити струм І, то в цьому випадку на його обмотці 6 буде індукована ЕРС, величина якої буде залежна від потужності струму та його частоти. Така ситуація виникає тому, що феромагнітне осереддя 1 (Фіг.1) відчутника є концентратором магнітного поля, яке виникає навколо провідника з струмом згідно закону БіоСавара-Лапласа, тобто напруженість магнітного поля визначена як I 2 2 , або H = I , 2pR pa де R - відстань до середньої лінії феромагнітного осереддя; a - одна четверта довжини середньої лінії осереддя 1 у випадку прямокутного осереддя (Фіг.1). Тобто це є прямі аналогії з індуктивним відчутником. За таких обставин запропоновано використання індуктивного відчутника у режимі індукційного. Отже це надає можливість об'єднати найкращі властивості як даного, так і другого відчутника. Передатна функція відчутника та характер напруги на його ви ході є залежними від співвідношення параметрів L, Cн, Ro, Rа і можуть бути описані залежністю UB=F(L, C н, R o, Rа)×w×cos(wt+j), де w - резонансна частота відчутника, j - кут фази, Ro - активний опір обмотки, складений у загальному випадку з активного опору обмотки та еквівалентним втратам у осередді; Rа - активний опір навантаження. При цьому можливі різні режими роботи магнітоіндукційних відчутників струму. Тобто цей відчутник є трансформатором I n= w і струму з коефіцієнтом трансформації H= Uв их I . Максимальна чутливість чутливістю відчутника при вірній передачі форми може сягати 10 ¸ 15В / А . Sч = Отже за способом при встановленні різального інструмента 10 в осереддя 1 відчутника у процесі різання під впливом вібрацій змінюється величина зазору між статичним елементом 2 та інерційним елементом 3 осереддя. Оскільки амплітуда вібрацій впливає на величину зазору d індуктивного відчутника, то врешті індуктивність є функцією, що залежить від d. Змінення індуктивності L в процесі роботи відчутника залежить від змінення d під впливом вібрацій інструмента, на якому розташований двопараметричний відчутник. Відчутник таким чином являє собою резонансний контур, збуджений магнітним полем змінного струму, який виникає у різальному інструменті 10 (Фіг.4) при торканні поверхні деталі 11. Коливальний контур утворюється в цьому випадку за рахунок індуктивності чутника L та ємності навантаження. Чутливість чутника - S у цьому режимі зростає із збільшенням добротності хвильового опору контура. 5 30278 L = mzL0 m Відомо, що індуктивність , де z магнітна проникність матеріалу відчутника. Якщо виявити в функції залежність індуктивності відчутника від амплітуди вібрацій РІ, тобто резонансна частота контуру набуває вигляду 2p w= . dL ö æ m z çL0 + ÷C dt ø è В цьому випадку частота налагодження контуру починає змінюватися зі зміною амплітуди. Оскільки опорна частота контуру стабільна, то будь-яке розлагодження призведе до того, що вихідний сигнал контуру зменшується. Це явище викликає модуляцію сигналу по амплітуді. При цьому зберігається висока чутливість до торкання як у статичному, так і у динамічному режимах. З другого боку для контролю та прогнозування плинного процесу різання, необхідно отримати сигнал вібрацій, який характеризує коливання електромеханічної системи РІ, деталі та всього обладнання. Тому, оскільки чутливість електромагнітного відчутника невелика, то він реагує лише на перенавантаження технологічної системи, тобто створює електричний сигнал для подальшого аналізу стану системи та процесу обробки в цілому. Отже можна стверджувати, що індуктивний відчутник цілком можливо використовува ти у якості індукційного при вимірюванні як магнітного, так і вібраційного поля. Для комплексного відчутника з властивостями індуктивного та індукційного як паралельного контуру струм, що виникає у відчутнику 2 2 æUö æ 1 ö I= ç ÷ +ç - wC ÷ U2 R ø è wL è ø , де R - активний опір відчутника, С - ємність, L - індуктивність. При цьому напруга відчутника æ 2 2 ç æ 1ö æ 1 ö U = Iç ç ÷ + ç - wC ÷ ç è R ø è wL ø è ö ÷ ÷ ÷ ø -1 L = mzL0 m Відомо, що індуктивність , де z магнітна проникність матеріалу відчутника. Тоді -1 æ 2 ö ç æ 1 ö2 æ 1 ö ÷ U = Iç ç ÷ + ç - wC ÷ ÷ ç wm L ÷ z 0 ç èR ø è ø ÷ è ø Підвищення ефективності застосування запропонованого способу реєстрації вібрацій об'єкта в електромагнітному полі для контролю торкання та стану різального інструмента досягається тим, що проводять аналіз електромагнітних та акустичних явищ у процесі різання, тобто за рахунок суміщення індукційних та індуктивних властивостей встановленого відчутника реєструють вібраційну та електромагнітну складові динаміки процесу різання для підвищення вірогідності визначення 6 плинного стану різального леза інструмента. Позитивним ефектом даного технічного рішення є підвищення точності визначення параметрів вібрацій різального інструмента у зоні різання досягається в порівнянні з системою прототипу шляхом суміщення індукційних та індуктивних властивостей для реєстрації інформаційного сигналу, що характеризує динаміку перетворень у масі інструмента та деталі, сприяє підвищенню якості прецизійної продукції та запобіганню критичних ситуацій процесу різання.
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for registration of vibrations of object in electromagnetic field
Автори англійськоюSkytsiuk Volodymyr Ivanovych, Klochko Mykhailo Markovych, Klochko Tetiana Redzhynaldivna
Назва патенту російськоюСпособ регистрации вибраций объекта в электромагнитном поле
Автори російськоюСкицюк Владимир Иванович, Клочко Михаил Маркович, Клочко Татьяна Реджинальдовна
МПК / Мітки
МПК: G01N 29/04, G01P 15/13
Мітки: об'єкта, полі, вібрацій, спосіб, реєстрації, електромагнітному
Код посилання
<a href="https://ua.patents.su/3-30278-sposib-reehstraci-vibracijj-obehkta-v-elektromagnitnomu-poli.html" target="_blank" rel="follow" title="База патентів України">Спосіб реєстрації вібрацій об`єкта в електромагнітному полі</a>
Спосіб активації бетонних сумішей в обертовому електромагнітному полі
Номер патенту: 69552
Опубліковано: 15.09.2004
Автори: Дрьомов Володимир Володимирович, Александров Валерій Дмитрович, Зайченко Людмила Генадіївна
МПК: E04G 21/04
Мітки: полі, бетонних, активації, обертовому, електромагнітному, спосіб, сумішей
Формула / Реферат:
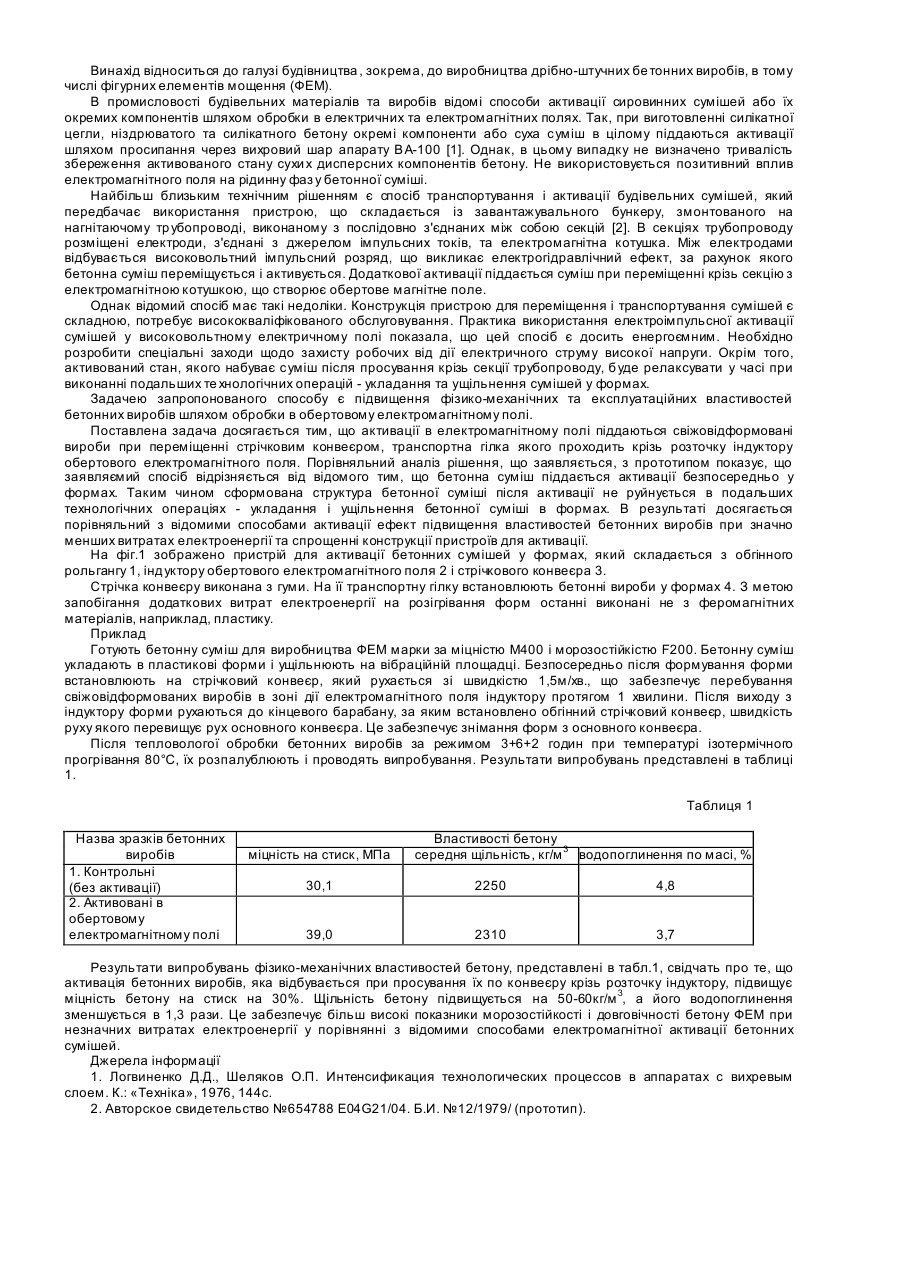
Спосіб активації бетонних сумішей в обертовому електромагнітному полі, який відрізняється тим, що активації свіжовідформовані бетонні вироби піддають безпосередньо у формах при їх переміщенні стрічковим конвеєром крізь розточку індуктора обертового електромагнітного поля.
Спосіб сушіння вогнетривких виробів в електромагнітному полі надвисокої частоти
Номер патенту: 6605
Опубліковано: 29.12.1994
Автори: Стеценко Віктор Григорович, Звержковський Ігор Володимирович, Грачов Кім Григорович, Шевцов Віталій Тимофійович
МПК: F26B 3/32
Мітки: спосіб, вогнетривких, електромагнітному, полі, сушіння, надвисокої, виробів, частоти
Формула / Реферат:
(57) Способ сушки огнеупорных изделий в электромагнитном поле сверхвысокой частоты путем изменения плотности потока мощности сверхвысокочастотного излучения обрабатываемого материала по экспоненциальному закону, отличающийся тем, что предварительно определяют уровень плотности потока мощности при нулевой влажности материала изделия, устанавливают коэффициент уровня плотности потока мощности, коэффициент максимума плотности потока мощности,...
Пристрій для передпосівного обробітку насіння в електромагнітному полі
Номер патенту: 65240
Опубліковано: 16.05.2005
Автори: Ніженець Наталія Володимирівна, Лукач Василь Степанович, Міщенко Василь Ілліч, Ярошенко Володимир Федорович, Кушніренко Анатолій Григорович
МПК: A01C 1/00
Мітки: пристрій, передпосівного, електромагнітному, полі, насіння, обробітку
Формула / Реферат:
1. Спосіб розробки газоконденсатного родовища, що містить стадії буріння видобувних та нагнітальних свердловин, їх перфорації, закачування сухого газу через нагнітальні свердловини та відбору жирного газу через видобувні свердловини, який відрізняється тим, що в процесі видобутку жирного газу підтримують стабільною різницю поміж тиском закачуваного сухого газу та пластовим тиском шляхом постійного зниження об'ємів зворотного закачування...
Пристрій для передпосівної обробки насіння в електромагнітному полі низької частоти
Номер патенту: 53519
Опубліковано: 15.01.2003
Автор: Сідун Олександр Андрійович
МПК: A01C 1/00
Мітки: обробки, частоти, полі, електромагнітному, пристрій, низької, передпосівної, насіння
Формула / Реферат:
1. Пристрій для передпосівної обробки насіння у електромагнітному полі низької частоти, що містить блок живлення, з'єднаний з робочою камерою, усередині якої розміщена котушка соленоїда для обробки насіння, який відрізняється тим, що блок живлення виконаний у вигляді послідовно з'єднаних вузла стабілізації живильної напруги, підсилювача потужності низької частоти, вимикача робочої камери та узгоджувального пристрою, вихід якого є виходом...
Пристрій для зменшення вібрацій радіоелементів
Номер патенту: 24404
Опубліковано: 17.07.1998
Автори: Бастрічев Володимир Семенович, Шишолін Павло Анатолієвич, Олексієнко Борис Миколайович, Нестер Микола Антонович, Ройзман Вілен Петрович, Нестер Анатолій Антонович
МПК: F16F 9/00
Мітки: радіоелементів, пристрій, вібрацій, зменшення
Формула / Реферат:
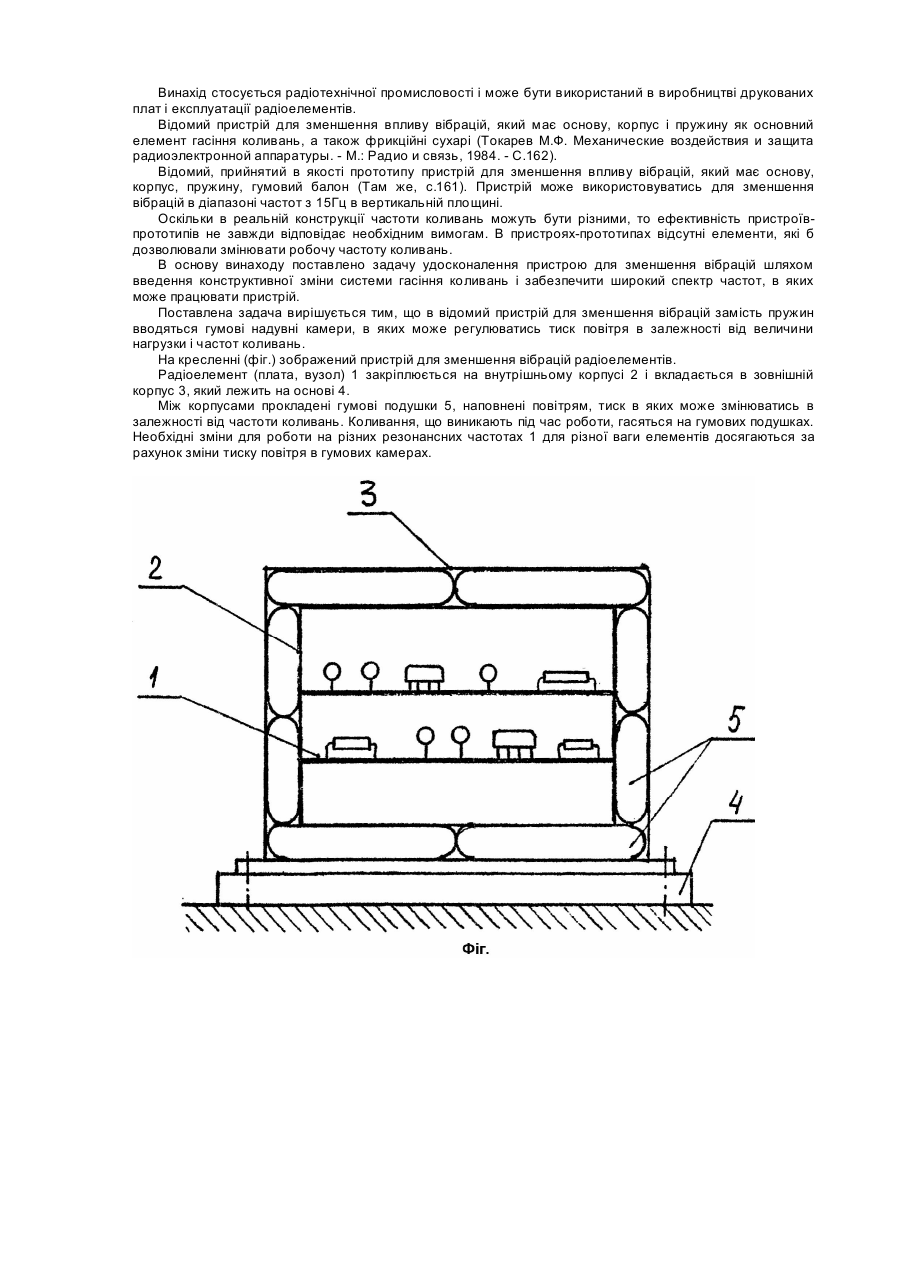
Пристрій для зменшення вібрацій радіоелементів, який має основу, корпус, який відрізняється тим, що він споряджений гумовими надувними камерами з регульованим тиском.
Попередній патент: Легкий багатоцільовий вертоліт
Наступний патент: Електромагнітно-акустичний відчутник