Електромагнітно-акустичний відчутник
Номер патенту: 30279
Опубліковано: 25.02.2008
Автори: Клочко Тетяна Реджинальдівна, Скицюк Володимир Іванович, Клочко Михайло Маркович
Формула / Реферат
Електромагнітно-акустичний відчутник, який містить корпус, обмотку ЕРС, електронну систему підсилення, інерційний елемент, розташований на пружному підвісі, який відрізняється тим, що в центральному отворі феромагнітного осереддя встановлений електропровідний елемент, підключений до генератора змінного магнітного поля, феромагнітне осереддя виконане з статичного та інерційного елементів, при цьому інерційний елемент прикріплений на пружному підвісі до корпусу, а статичний елемент має обмотку, величина зазору між статичним та інерційним елементами є змінною, залежною від амплітуди вібрацій відчутника.
Текст
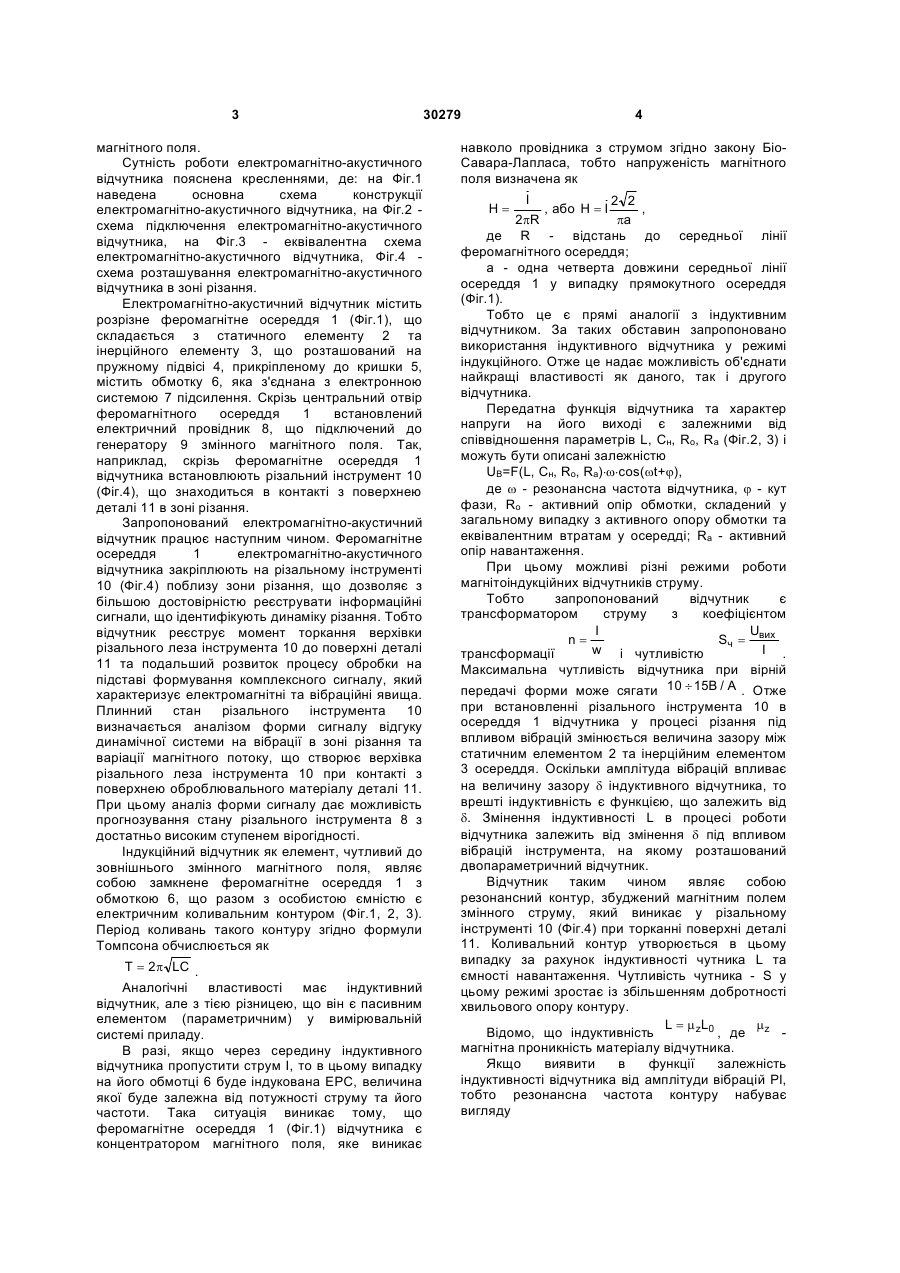
Електромагнітно-акустичний відчутник, який містить корпус, обмотку ЕРС, електронну систему 3 магнітного поля. Сутність роботи електромагнітно-акустичного відчутника пояснена кресленнями, де: на Фіг.1 наведена основна схема конструкції електромагнітно-акустичного відчутника, на Фіг.2 схема підключення електромагнітно-акустичного відчутника, на Фіг.3 - еквівалентна схема електромагнітно-акустичного відчутника, Фіг.4 схема розташування електромагнітно-акустичного відчутника в зоні різання. Електромагнітно-акустичний відчутник містить розрізне феромагнітне осереддя 1 (Фіг.1), що складається з статичного елементу 2 та інерційного елементу 3, що розташований на пружному підвісі 4, прикріпленому до кришки 5, містить обмотку 6, яка з'єднана з електронною системою 7 підсилення. Скрізь центральний отвір феромагнітного осереддя 1 встановлений електричний провідник 8, що підключений до генератору 9 змінного магнітного поля. Так, наприклад, скрізь феромагнітне осереддя 1 відчутника встановлюють різальний інструмент 10 (Фіг.4), що знаходиться в контакті з поверхнею деталі 11 в зоні різання. Запропонований електромагнітно-акустичний відчутник працює наступним чином. Феромагнітне осереддя 1 електромагнітно-акустичного відчутника закріплюють на різальному інструменті 10 (Фіг.4) поблизу зони різання, що дозволяє з більшою достовірністю реєструвати інформаційні сигнали, що ідентифікують динаміку різання. Тобто відчутник реєструє момент торкання верхівки різального леза інструмента 10 до поверхні деталі 11 та подальший розвиток процесу обробки на підставі формування комплексного сигналу, який характеризує електромагнітні та вібраційні явища. Плинний стан різального інструмента 10 визначається аналізом форми сигналу відгуку динамічної системи на вібрації в зоні різання та варіації магнітного потоку, що створює верхівка різального леза інструмента 10 при контакті з поверхнею оброблювального матеріалу деталі 11. При цьому аналіз форми сигналу дає можливість прогнозування стану різального інструмента 8 з достатньо високим ступенем вірогідності. Індукційний відчутник як елемент, чутливий до зовнішнього змінного магнітного поля, являє собою замкнене феромагнітне осереддя 1 з обмоткою 6, що разом з особистою ємністю є електричним коливальним контуром (Фіг.1, 2, 3). Період коливань такого контуру згідно формули Томпсона обчислюється як T = 2p LC . Аналогічні властивості має індуктивний відчутник, але з тією різницею, що він є пасивним елементом (параметричним) у вимірювальній системі приладу. В разі, якщо через середину індуктивного відчутника пропустити струм І, то в цьому випадку на його обмотці 6 буде індукована ЕРС, величина якої буде залежна від потужності струму та його частоти. Така ситуація виникає тому, що феромагнітне осереддя 1 (Фіг.1) відчутника є концентратором магнітного поля, яке виникає 30279 4 навколо провідника з струмом згідно закону БіоСавара-Лапласа, тобто напруженість магнітного поля визначена як I 2 2 , або H = I , pa 2pR де R - відстань до середньої лінії феромагнітного осереддя; a - одна четверта довжини середньої лінії осереддя 1 у випадку прямокутного осереддя (Фіг.1). Тобто це є прямі аналогії з індуктивним відчутником. За таких обставин запропоновано використання індуктивного відчутника у режимі індукційного. Отже це надає можливість об'єднати найкращі властивості як даного, так і другого відчутника. Передатна функція відчутника та характер напруги на його виході є залежними від співвідношення параметрів L, Cн, Ro, Rа (Фіг.2, 3) і можуть бути описані залежністю UB=F(L, Cн, Ro, Rа)×w×cos(wt+j), де w - резонансна частота відчутника, j - кут фази, Ro - активний опір обмотки, складений у загальному випадку з активного опору обмотки та еквівалентним втратам у осередді; Rа - активний опір навантаження. При цьому можливі різні режими роботи магнітоіндукційних відчутників струму. Тобто запропонований відчутник є трансформатором струму з коефіцієнтом I Uвих = n Sч = w і чутливістю I . трансформації Максимальна чутливість відчутника при вірній передачі форми може сягати 10 ¸ 15В / А . Отже при встановленні різального інструмента 10 в осереддя 1 відчутника у процесі різання під впливом вібрацій змінюється величина зазору між статичним елементом 2 та інерційним елементом 3 осереддя. Оскільки амплітуда вібрацій впливає на величину зазору d індуктивного відчутника, то врешті індуктивність є функцією, що залежить від d. Змінення індуктивності L в процесі роботи відчутника залежить від змінення d під впливом вібрацій інструмента, на якому розташований двопараметричний відчутник. Відчутник таким чином являє собою резонансний контур, збуджений магнітним полем змінного струму, який виникає у різальному інструменті 10 (Фіг.4) при торканні поверхні деталі 11. Коливальний контур утворюється в цьому випадку за рахунок індуктивності чутника L та ємності навантаження. Чутливість чутника - S у цьому режимі зростає із збільшенням добротності хвильового опору контуру. L = m zL0 m Відомо, що індуктивність , де z магнітна проникність матеріалу відчутника. Якщо виявити в функції залежність індуктивності відчутника від амплітуди вібрацій РІ, тобто резонансна частота контуру набуває вигляду H= 5 w= 2p . dL ö æ m z ç L0 + ÷C dt ø è В цьому випадку частота налагодження контуру починає змінюватися зі зміною амплітуди. Оскільки опорна частота контуру стабільна, то будь-яке розлагодження призведе до того, що вихідний сигнал контуру зменшується. Це явище викликає модуляцію сигналу по амплітуді. При цьому зберігається висока чутливість до торкання як у статичному, так і у динамічному режимах. З другого боку для контролю та прогнозування плинного процесу різання, необхідно отримати сигнал вібрацій, який характеризує коливання електромеханічної системи РІ, деталі та всього обладнання. Тому, оскільки чутливість електромагнітного відчутника невелика, то він реагує лише на перенавантаження технологічної системи, тобто створює електричний сигнал для подальшого аналізу стану системи та процесу обробки в цілому. З усього вищенаведеного можна стверджувати, що запропонований індуктивний відчутник цілком можливо використовувати у якості індукційного при вимірюванні як магнітного, так і вібраційного поля різального інструмента. Підвищення ефективності застосування запропонованого електромагнітно-акустичного відчутника для контролю торкання та стану різального інструмента досягається тим, що відчутник виконано двопараметричним електромагнітно-акустичним, тобто за рахунок суміщення індукційних та індуктивних властивостей реєструють вібраційну та електромагнітну складові динаміки процесу різання для підвищення вірогідності визначення плинного стану різального леза інструмента. Позитивним ефектом даного технічного рішення є підвищення точності визначення параметрів вібрацій різального інструмента у зоні різання досягається в порівнянні з системою прототипу шляхом суміщення індукційних та індуктивних властивостей для реєстрації інформаційного сигналу, що характеризує динаміку перетворень у масі інструмента та деталі, сприяє підвищенню якості прецизійної продукції та запобіганню критичних ситуацій процесу різання. 30279 6
ДивитисяДодаткова інформація
Назва патенту англійськоюElectromagnetic-acoustic sensor
Автори англійськоюSkytsiuk Volodymyr Ivanovych, Klochko Mykhailo Markovych, Klochko Tetiana Redzhynaldivna
Назва патенту російськоюЭлектромагнитно-акустический сенсор
Автори російськоюСкицюк Владимир Иванович, Клочко Михаил Маркович, Клочко Татьяна Реджинальдовна
МПК / Мітки
МПК: G01N 29/04, G01P 15/13
Мітки: відчутник, електромагнітно-акустичний
Код посилання
<a href="https://ua.patents.su/3-30279-elektromagnitno-akustichnijj-vidchutnik.html" target="_blank" rel="follow" title="База патентів України">Електромагнітно-акустичний відчутник</a>
Спосіб реєстрації вібрацій об`єкта в електромагнітному полі
Номер патенту: 30278
Опубліковано: 25.02.2008
Автори: Скицюк Володимир Іванович, Клочко Тетяна Реджинальдівна, Клочко Михайло Маркович
МПК: G01N 29/04, G01P 15/13
Мітки: електромагнітному, вібрацій, реєстрації, спосіб, об'єкта, полі
Формула / Реферат:
Спосіб реєстрації вібрацій об'єкта в електромагнітному полі, що включає за наявності вібрацій об'єкта в обмотці відчутника реєстрацію зміни напруги ЕРС, величини яких пропорційні швидкості переміщення інерційного елемента відчутника, який відрізняється тим, що об'єднують індуктивні та індукційні властивості відчутника, для чого формують змінне магнітне поле, яке охоплює об'єкт та феромагнітне осереддя відчутника, що виконують з інерційного та...
Сканіруючий електромагнітно-акустичний перетворювач
Номер патенту: 12256
Опубліковано: 25.12.1996
Автори: Лаптєв Євген Валерійович, Редько Володимир Іванович
МПК: G01N 29/04
Мітки: сканіруючий, перетворювач, електромагнітно-акустичний
Формула / Реферат:
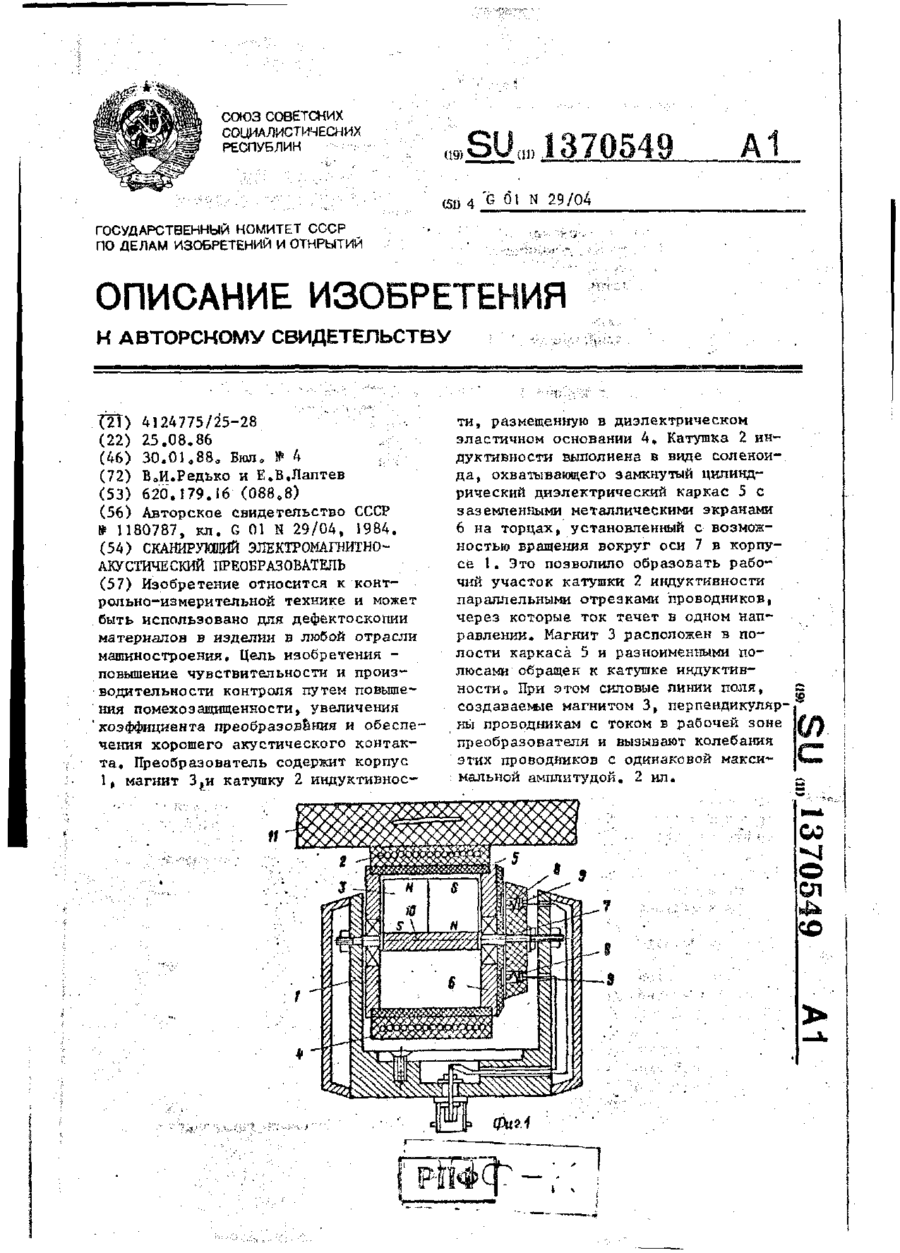
Сканирующий электромагнитно-акустический преобразователь для неразрушающего контроля, содержащий корпус, установленные в корпусе магнит и катушку индуктивности, размещенную в основании из эластичного диэлектрического материала, отличающийся тем, что, с целью повышения чувствительности и производительности контроля, он снабжен цилиндрическим диэлектрическим каркасом, установленным в корпусе с возможностью вращения вокруг своей оси,...
Сканіруючий електромагнітно-акустичний перетворювач
Номер патенту: 11440
Опубліковано: 25.12.1996
Автор: Редько Володимир Іванович
МПК: G01N 29/04
Мітки: сканіруючий, перетворювач, електромагнітно-акустичний
Формула / Реферат:
Сканирующий электромагнитно-акустический преобразователь, содержащий корпус, размещенный в корпусе магнит, установленное на рабочем торце основание из эластичного диэлектрического материала с твердостью по Шору 70-76°, размещенную в основании высокочастотную катушку индуктивности н стабилизатор прижима основания, отличающийся тем, что, с целью повышения достоверности контроля, катушка установлена от магнита на расстоянии h, выбранном из...
Пристрій для електрично-скануючого електромагнітно-акустичного неруйнівного контролю струмопровідних матеріалів
Номер патенту: 40300
Опубліковано: 16.07.2001
Автори: Обшта Анатолій Феліксович, Костюк Іван Васильович, Притуляк Ярополк Григорович, Варецький Ярема Юрійович, Тасінкевич Юрій Георгійович
МПК: G01N 29/12
Мітки: електрично-скануючого, пристрій, струмопровідних, контролю, електромагнітно-акустичного, неруйнівного, матеріалів
Формула / Реферат:
Пристрій для електрично-скануючого, електромагнітно-акустичного неруйнівного контролю струмопровідних матеріалів, який містить послідовно з'єднані генератор прямокутних імпульсів, подільник частоти, фазозсувний блок, генератор сигналів, першу збуджувальну котушку індуктивності, а також послідовно з'єднану з другим виходом генератора прямокутних імпульсів другу збуджувальну котушку індуктивності та приймальну котушку індуктивності, при цьому...
Електромагнітно-імпульсний двигун

Номер патенту: 20022
Опубліковано: 25.12.1997
Автор: Головащук Борис Миколайович
МПК: H02K 23/00
Мітки: електромагнітно-імпульсний, двигун
Формула / Реферат:
Електромагнітно-імпульсний двигун, в який входять три основні частини, а саме, циліндричний нерухомий статор або остов двигуна, рухомий ротор барабанного типу з насадженими контактними та колекторними кільцями на валу, щітково-колекторний вузол, в якому вмонтований блок з конденсаторами та елементами активного опору, який відрізняється тим, що з можливістю обертання ротора з збільшеним крутним моментом в нерухомому, але в змінному по величині...
Попередній патент: Спосіб реєстрації вібрацій об`єкта в електромагнітному полі
Наступний патент: Індивідуальний біотуалет
Випадковий патент: Спосіб прогнозування зрощення перелому