Елекропривод з частотно-струмовим керуванням
Формула / Реферат
Электропривод с частотно-токовым управлением, содержащий синхронный двигатель, датчик положения, ротор которого механически соединен с ротором двигателя, а цепь возбуждения подключена к первому выходу источника опорных сигналов, блок выборки-хранения с опорным и управляющими входами, подключенный выходами через регулируемый источник тока к фазным обмоткам двигателя, блок умножения, подключенный первым входом к второму выходу источника опорных сигналов, вторым входом к задатчмку тока, а выходом к опорному входу блока выборки-хранения, преобразователь сигналов датчика положения, подключенный входами к выходным обмоткам датчика положения, формирователь коротких импульсов, подключенный входами к выходу преобразователя сигналов датчика положения, отличающийся тем, что в него введен дополнительный формирователь коротких импульсов, а преобразователь сигналов датчика положения снабжен дополнительным квадратурным выходом, при этом дополнительный формирователь коротких импульсов подключен входом к дополнительному квадратурному выходу преобразователя сигналов датчика положения, а выходом к второму управляющему входу блока выборки-хранения.
Текст
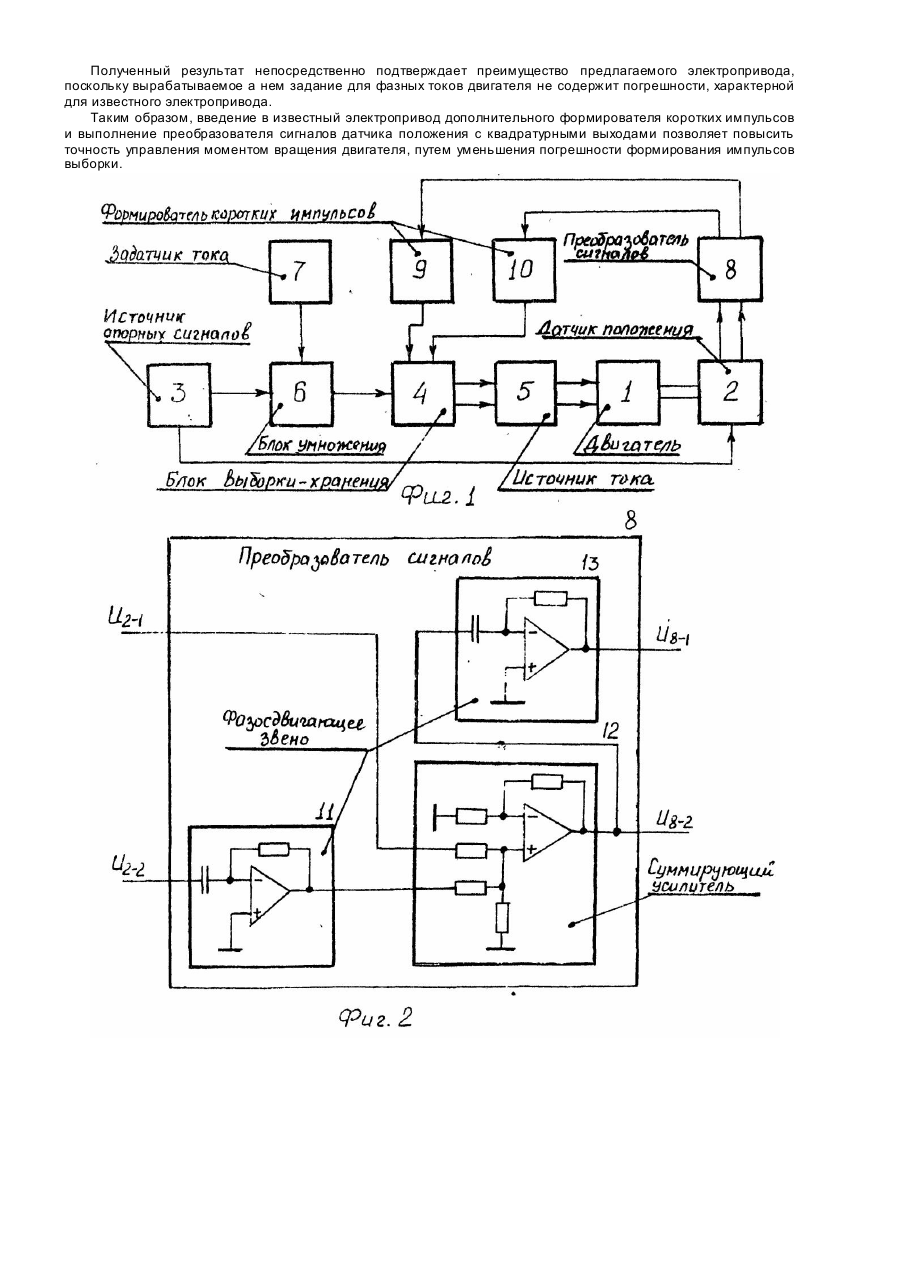
Изобретение относится к электротехнике и может быть использовано в приводах с частотно-токовым управлением, в частности в линейном электроприводе. Известен электропривод с частотно-токовым управлением, содержащий синхронный двигатель, датчик положения типа сельсина, ротор которого механически соединен с ротором двигателя, блок фазированных выпрямителей, подключенный информационными входами к выходным обмоткам датчика положения, опорным входом к выходу генератора синусоидального напряжения, а выходами через регулируемый источник тока к фазным обмоткам двигателя, блок умножения, подключенный первым входом к выходу генератора синусоидального напряжения, вторым входом к задатчику тока, а выходом к обмотке возбуждения датчика положения [1]. Недостатком известного электропривода является невысокое быстродействие, обусловленное инерционностью цепи возбуждения датчика положения. Известен электропривод с частотно-токовым управлением, содержащий синхронный двигатель, датчик положения, ротор которого механически соединен с ротором двигателя, а цепь возбуждения подключена к источнику синусоидального напряжения, блок выборки-хранения с опорными и управляющим входами, подключенный выходами через регулируемый источник тока к фазным обмоткам двигателя, блоки умножения, подключенные первыми входами к выходам источника синусоидального напряжения, вторыми входами к задатчику тока, а выходами к опорным входам блока выборки-хранения, преобразователь сигналов датчика положения, подключенный входами к выходным обмоткам датчика положения, формирователь коротких импульсов, подключенный входом к выходу преобразователя сигналов датчика положения, а выходом к управляющему входу блока выборки-хранения [2]. В известном электроприводе управление момент пропорциональны амплитудам синусоидальных напряжений, поступающи х на опорные входы блока выборки-хранения, и регулируются с помощью блоков умножения вращения двигателя осуществляется путем регулирования амплитуд его фазных токов. Амплитуды фазных токов. Поскольку для блоков умножения характерна погрешность перемножения сигналов, то при формировании фазных токов двигателя возникает неравенство их амплитуд, приводящее к пульсациям момента вращения. Недостатком известного электропривода является невысокая точность управления моментом вращения двигателя, обусловленная возникающим неравенством амплитуд его фазных токов. Наиболее близким по технической сущности к предлагаемому является электропривод. содержащий синхронный двигатель, датчик положения, ротор которого механически соединен с ротором двигателя, а цепь возбуждения подключена к первому выходу источника опорных сигналов, блок выборки-хранения с опорным и управляющими входами, подключенный выходами через регулируемый источник тока к фазным обмоткам двигателя, блок умножения, подключенный первым входом к второму выходу источника опорных сигналов, вторым входом и задатчику тока, а выходом к опорному входу блока выборки-хранения, преобразователь сигналов датчика положения, подключенный входами к выходным обмоткам датчика положения, формирователь коротких импульсов, подключенный входом к выходу преобразователя сигналов датчика положения. Кроме того, электропривод содержит формирователь импульсов выборки, подключенный входами к выходу формирователя коротких импульсов и к третьему выходу источника опорных сигналов, а выходами к управляющим входам блока выборки-хранения [3]. В известном электроприводе на опорный вход блока выборки-хранения приходит ступенчатый сигнал с регулируемой амплитудой, принимающий значения Um cos 2p fNt в моменты времени t c = 2k D t и значения Um sin2p fNt в моменты времени t s = ( 2k + 1) Dt, где fN, Dt - постоянные величины, k=0,1,2,... На управляющие входы блока выборки-хранения поступают импульсы управления Sc и S3, вырабатываемые формирователем импульсов выборки. В момент смены знака входного сигнала формирователя коротких импульсов с отрицательного на положительный вырабатывается опросный импульс S, Импульсы управления Sc и Ss формируются из опросного импульса S путем синхронизации с моментами времени tc и ts соответственно. В результате на выходах блока выборки-хранения вырабатываются необходимые задания для фазных токов двигателя. Недостатком известного электропривода является невысокая точность управления моментом вращения двигателя, обусловленная погрешностью формирования импульсов выборки. Изобретение состоит в создании такого электропривода, который позволит достичь повышения точности управления моментом вращения двигателя за счет повышения точности формирования заданий для фазных токов двигателя путем уменьшения погрешности формирования импульсов выборки. Поставленная задача решается тем, что в электропривод с частотно-токовым управлением, содержащий синхронный двигатель, датчик положения, ротор которого механически соединен с ротором двигателя, а цепь возбуждения подключена к первому выходу источника опорных сигналов, блок выборки-хранения с опорным и управляющими входами, подключенный выходами через регулируемый источник тока к фазным обмоткам двигателя, блок умножения, подключенный первым входом к второму выходу источника опорных сигналов, вторым входом к задатчику тока, а выходом к опорному входу блока выборки-хранения, преобразователь сигналов датчика положения, подключенный входами к выходным обмоткам датчика положения, формирователь коротких импульсов, подключенный входами к выходу преобразователя сигналов датчика положения, согласно изобретению, в него введен дополнительный (второй) формирователь коротких импульсов, а преобразователь сигналов датчика положения снабжен дополнительным (вторым) квадратурным выходом, к которому подключен входом второй формирователь коротких импульсов при этом формирователи коротких импульсов подключены выходами к управляющим входам блока выборки-хранения. На фиг. 1 представлена схема электропривода, на фиг. 2 - схема преобразователя сигналов датчика положения. Электропривод содержит синхронный двигатель 1, датчик 2 положения, ротор которого механически соединен с ротором двигателя 1, а цепь возбуждения подключена к первому выходу источника 3 опорных сигналов, блок 4 выборки-хранения, подключенный выходами через регулируемый источник 5 тока к фазным обмоткам двигателя 1, блок 6 умножения, подключенный первым входом ко второму выходу источника 3 опорных сигналов, вторым входом к задатчику 7 тока, а выходом к опорному входу блока 4 выборки-хранения, преобразователь 8 сигналов датчика 2 положения, подключенный входами к выходным обмоткам датчика 2 положения, а выходами через формирователи 9, 10 коротких импульсов к управляющим входам блока 4 выборки-хранения. Задатчиком 7 тока может быть регулятор скорости или углового положения ротора двигателя. Датчиком 2 положения является синусно-косинусный преобразователь. Преобразователь 8 сигналов датчика 2 положения может быть выполнен по схеме, содержащей последовательно соединенные первое фазосдвигающее звено 11, суммирующий усилитель 12 и второе фазосдвигающее звено 13. При этом первым входом преобразователя 8 является второй вход суммирующего усилителя 12, вторым входом - вход первого фазосдвигающего звена 11. Первым выходом преобразователя 8 является выход второго фазосдвигающего звена 13. вторым выходом - выход суммирующего усилителя 12. Фазосдвигающее звено может быть выполнено на основе дифференциатора. Блок 4 выборки-хранения состоит из двух однотипных устройств выборки-хранения. Опорным входом блока 4 являются объединенные информационные входы устройств выборки-хранения, а управляющими входами коммутирующие входы устройств выборки-хранения. Электропривод работает следующим образом. В качестве синхронного двигателя 1 рассматривается двухфазная машина с возбуждением от постоянных магнитов. В случае применения m-фазного двигателя 1 регулируемый источник 5 тока снабжается преобразователем числа фаз и выполняется m-фазным. Задатчик 7 тока вырабатывает управляющий сигнал И 7 в виде напряжения постоянного тока. Этот сигнал поступает на вход блока 6 умножения, на другой вход которого подается синусоидальное напряжение. На опорном входе блока 4 выборки-хранения формируется напряжение где Аб , w - постоянные величины. Источник опорных сигналов запитывает синусоидальным напряжением также цепь возбуждения датчика 2 положения. С его выходных обмоток снимаются синусоидальные напряжения, модулированные по амплитуде, где q - угол поворота ротора двигателя 1, А2 - постоянная величина. Эти напряжения поступают на входы блока 8, который преобразует сигналы, модулированные по амплитуде, в сигналы, модулированные по фазе. На фиг. 2 представлена схема преобразователя 8 сигналов датчика положения, выполненная на основе дифференциаторов 11, 13 с коэффициентом усиления K = -1/ w и суммирующего усилителя 12. На выходах преобразователя вырабатываются синусоидальные напряжения где А8 - постоянная величина. Эти напряжения поступают на входы формирователей 9, 10, которые преобразуют входные синусоидальные сигналы в две последовательности коротких импульсов, смещенных друг относительно друга по фазе на угол p / 2. Короткий импульс вырабатывается в момент смены знака входного сигнала формирователя с отрицательного на положительный. Следовательно, на первый и второй управляющие входы блока 4 выборкихранения приходят импульсы выборки соответственно а моменты времени Поскольку на опорный вход блока 4 выборки-хранения поступает синусоидальное напряжение (1), а на его управляющие входы приходят импульсы выборки в моменты времени (2), то на выходах блока 4 формируется ступенчатый сигнал, аппроксимирующий двухфазное напряжение где А4 - постоянная величина. Сформированное двухфазное напряжение (3) и является заданием для фазных токов двигателя 1. Определим задание для фазных токов двигателя, вырабатываемое в известном электроприводе. Воспользуемся принятыми обозначениями. На опорный вход блока выборки-хранения поступает ступенчатый сигнал, принимающий значения функции A 6 U7 cos w t в моменты времени t c = 2k D t и значения функции A 6 U7 sin w t в моменты времени t s = ( 2k + 1) Dt, где D t - некоторый интервал времени, k=0,1,2,... Формирователь коротких импульсов вырабатывает импульсы в моменты времени Эти импульсы поступают на формирователь импульсов выборки, который формирует на первом и втором управляющих входах блока выборки-хранения импульсы выборки в моменты времени где d1 и d 2 - запаздывания, являющиеся случайными величинами. Следовательно, заданием для фазных токов двигателя, вырабатываемым в известном электроприводе, будет двухфазное напряжение: Полученный результат непосредственно подтверждает преимущество предлагаемого электропривода, поскольку вырабатываемое а нем задание для фазных токов двигателя не содержит погрешности, характерной для известного электропривода. Таким образом, введение в известный электропривод дополнительного формирователя коротких импульсов и выполнение преобразователя сигналов датчика положения с квадратурными выходами позволяет повысить точность управления моментом вращения двигателя, путем уменьшения погрешности формирования импульсов выборки.
ДивитисяДодаткова інформація
Назва патенту англійськоюFreqency-current electric drive control
Автори англійськоюYaroslavtsev Mykhailo Ivanovych
Назва патенту російськоюЭлектропривод с частотно-токовым управлением
Автори російськоюЯрославцев Михаил Иванович
МПК / Мітки
МПК: H02P 27/04
Мітки: керуванням, елекропривод, частотно-струмовим
Код посилання
<a href="https://ua.patents.su/3-3185-elekroprivod-z-chastotno-strumovim-keruvannyam.html" target="_blank" rel="follow" title="База патентів України">Елекропривод з частотно-струмовим керуванням</a>
Електропривід з частотно-струмовим керуванням
Номер патенту: 2945
Опубліковано: 26.12.1994
Автори: Ярославцев Михайло Іванович, Лукашенко Андрій Германович
МПК: H02P 27/04
Мітки: керуванням, електропривід, частотно-струмовим
Формула / Реферат:
Электропривод с частотно-токовым управлением, содержащий синхронный двигатель, фазовращатель, ротор которого механически соединен с ротором двигателя, цепь возбуждения фазовращателя подключена к выходу источника синусоидальных напряжений, последовательно соединенные фазовый детектор с управляющим первым и вторым опорными входами и регулируемый источник тока, выходы которого подключены к фазным обмоткам двигателя, формирователь коротких...
Електропривод з частотно-струмовим керуванням
Номер патенту: 3188
Опубліковано: 26.12.1994
Автори: Попов Віктор Іванович, Лукашенко Андрій Германович, Ярославцев Михайло Іванович
МПК: H02P 7/18
Мітки: частотно-струмовим, керуванням, електропривод
Формула / Реферат:
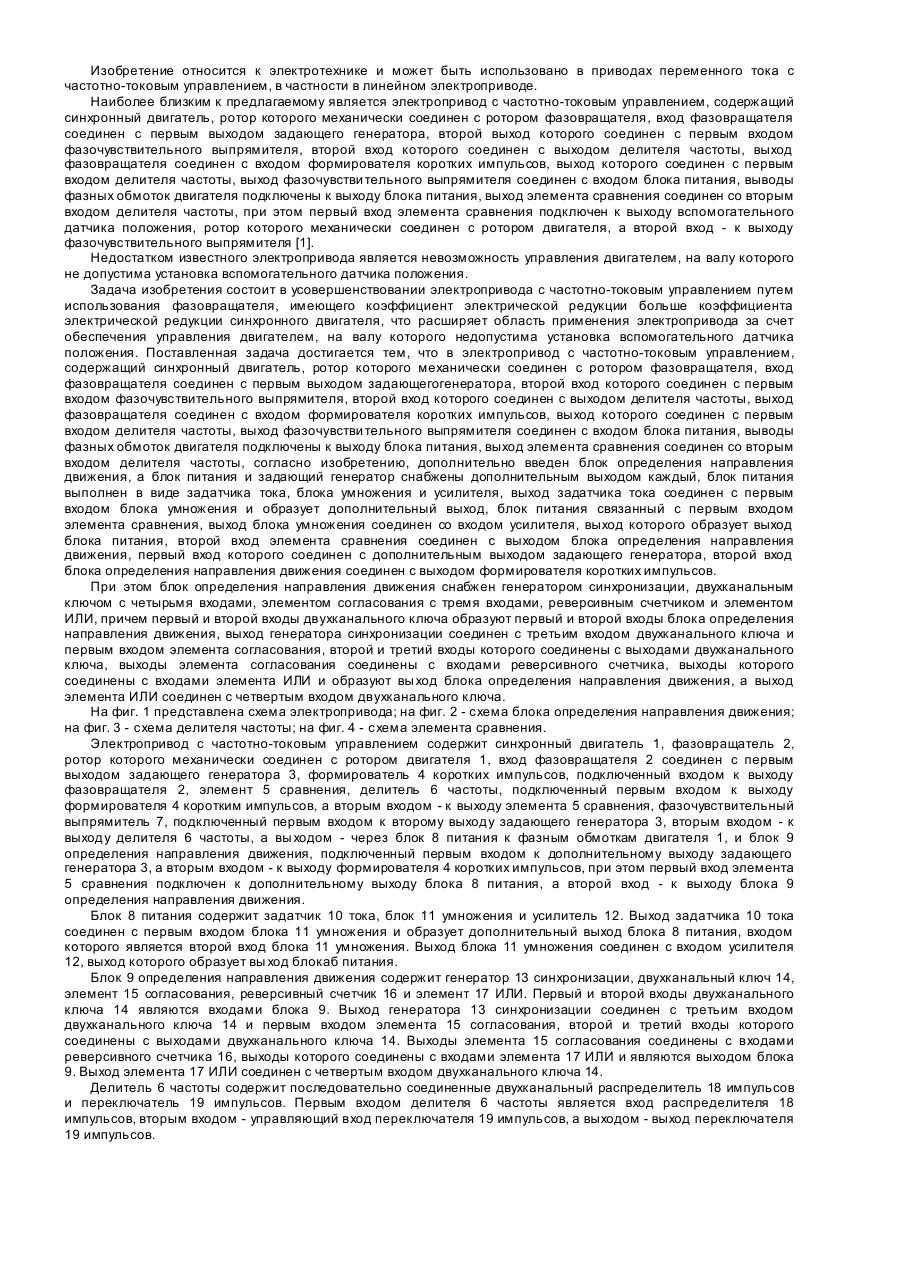
1. Электропривод с частотно-токовым управлением, содержащий синхронный двигатель, ротор которого механически соединен с ротором фазовращателя, вход фазовращателя соединен с первым выходом задающего генератора, второй вход которого соединен с первым входом фазочувствительного выпрямителя, второй вход которого соединен с выходом делителя частоты, выход фазовращателя соединен с входом формирователя коротких импульсов, выход которого соединен с...
Пристрій для управління трифазним двигуном змінного струму
Номер патенту: 3042
Опубліковано: 26.12.1994
Автор: Ярославцев Михайло Іванович
МПК: H02P 27/02
Мітки: двигуном, трифазним, змінного, управління, пристрій, струму
Формула / Реферат:
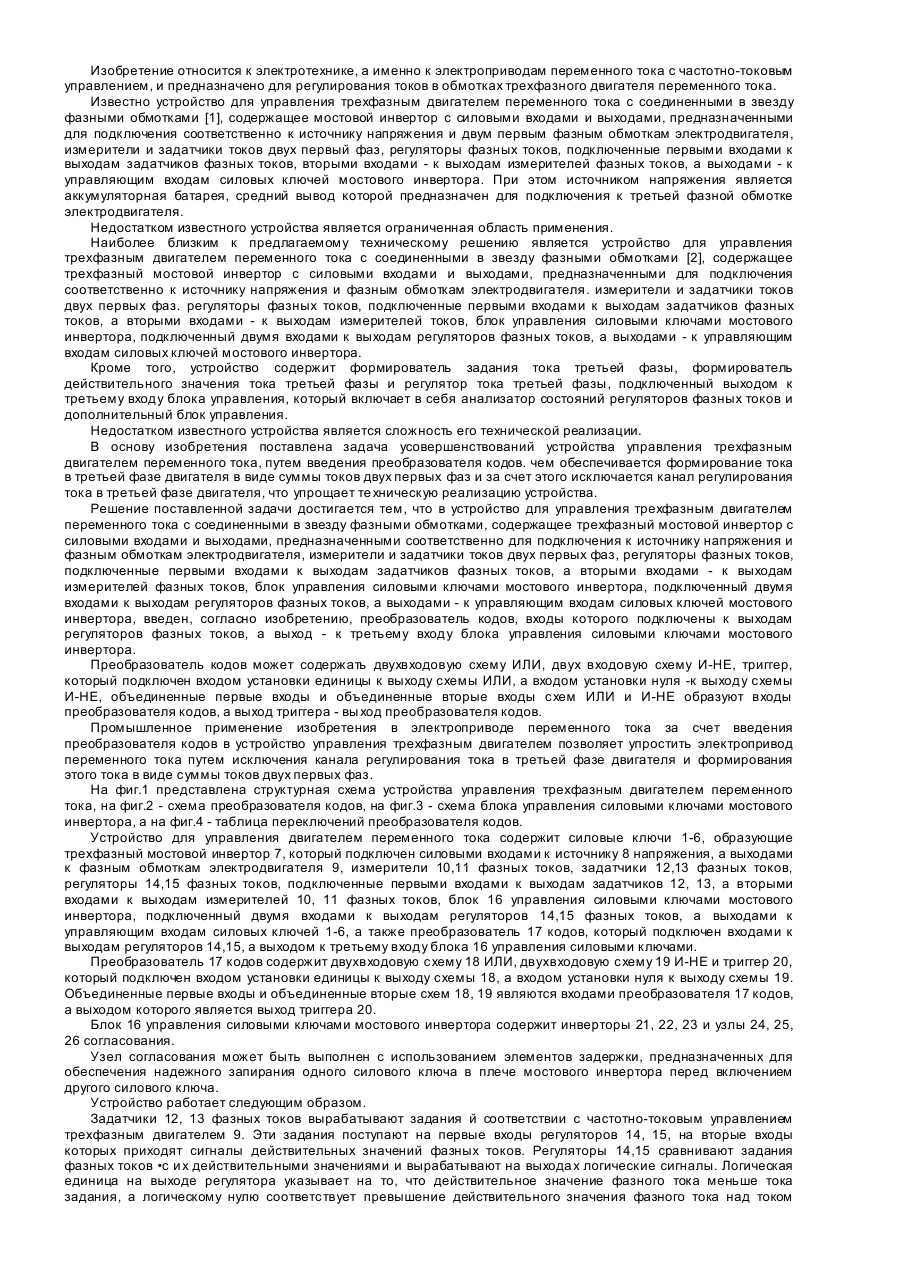
1. Устройство для управления трехфазным двигателем переменного, тока с соединенными в звезду фазными обмотками, содержащее трехфазный мостовой инвертор с силовыми входами и выходами, предназначенными соответственно для подключения к источнику напряжения и фазным обмоткам статора электродвигателя, измерители токов двух первых фаз, задатчики фазных токов, регуляторы фазных токов, подключенные первыми входами к выходам задатчиков фазных токов,...
Пристрій для вимірювання вібропереміщень ротора
Номер патенту: 355
Опубліковано: 30.04.1993
Автори: Іванов Сергій Григорович, Мирошниченко Микола Васильович, Серга Валерій Борисович, Барков Олександр Степанович, Квашин Михайло Федорович, Красюк Володимир Якович
МПК: H03B 1/00, G01H 1/00, G01M 1/22
Мітки: ротора, вібропереміщень, вимірювання, пристрій
Формула / Реферат:
(57) Изобретение относится к теплоэнергетике и может быть использовано для измерения виброперемещений роторов преимущественно паровых турбоагрегатов в процессе их пуска и эксплуатации. Цель изобретения - повышение точности измерения виброперемещений ротора за счет исключения влияния помех от дефектов поверхности ротора. Устройство содержит два бесконтактных измерительных преобразователя, установленных вблизи ротора соосно и диаметрально...
Спосіб частотного керування асинхронним двигуном
Номер патенту: 2944
Опубліковано: 26.12.1994
Автор: Ярославцев Михайло Іванович
МПК: H02P 27/04
Мітки: керування, асинхронним, спосіб, двигуном, частотного
Формула / Реферат:
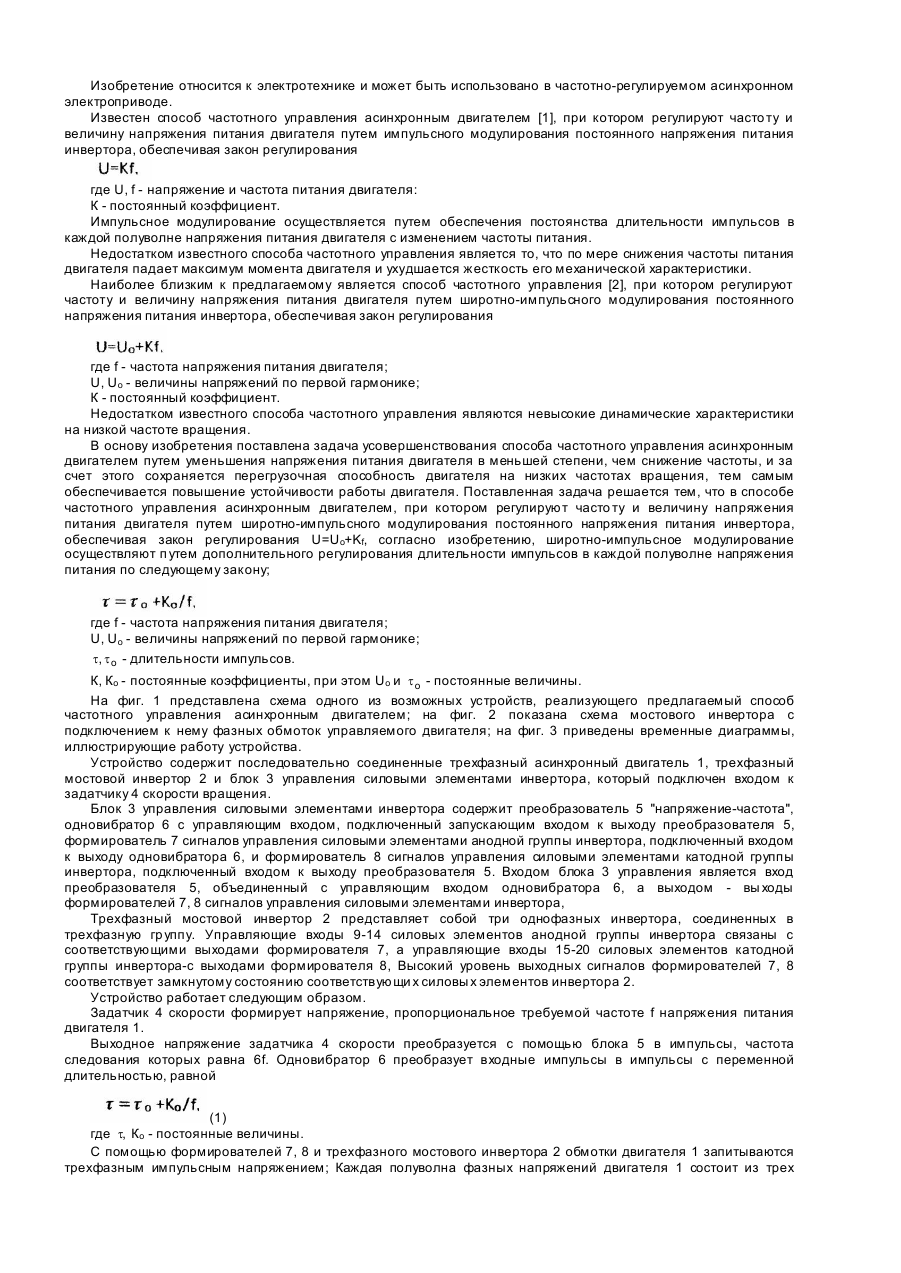
Способ частотного управления асинхронным двигателем, при котором регулируют частоту и величину напряжения питания асинхронного двигателя путем широтно-импульсного модулирования постоянного напряжения питания инвертора, обеспечивая закон регулирования U=Uo+Kf, отличающийся тем, что широтно-импульсное модулирование осуществляют путем дополнительного регулирования длительности импульсов в каждой полуволне напряжения питания по следующему...
Попередній патент: Спосіб керування мостовим інвертором з током навантаження, який регулюється
Наступний патент: Спосіб змішування природного газу з киснем
Випадковий патент: Спосіб дослідження фізико-механічних властивостей грунтів