Електропривід з частотно-струмовим керуванням
Номер патенту: 2945
Опубліковано: 26.12.1994
Автори: Лукашенко Андрій Германович, Ярославцев Михайло Іванович
Формула / Реферат
Электропривод с частотно-токовым управлением, содержащий синхронный двигатель, фазовращатель, ротор которого механически соединен с ротором двигателя, цепь возбуждения фазовращателя подключена к выходу источника синусоидальных напряжений, последовательно соединенные фазовый детектор с управляющим первым и вторым опорными входами и регулируемый источник тока, выходы которого подключены к фазным обмоткам двигателя, формирователь коротких импульсов, подключенный входом к выходу фазовращателя, формирователь опорных сигналов фазового детектора, подключенный первым входом к выходу блока управления, вторым входом - к выходу источника синусоидальных напряжений, а выходами - к соответствующим опорным входам фазового детектора, при этом формирователь опорных сигналов содержит блок умножения, входы которого являются входами указанного формирователя, а выход - его первым выходом, отличающийся тем, что формирователь опорных сигналов фазового детектора дополнительно содержит фазосмещающий блок, вход которого подключен к выходу блока умножения, а выход образует второй выход формирователя опорных сигналов фазового детектора, при этом источник синусоидальных напряжений выполнен одноканальным, а выход формирователя коротких импульсов подключен к управляющему входу фазового детектора.
Текст
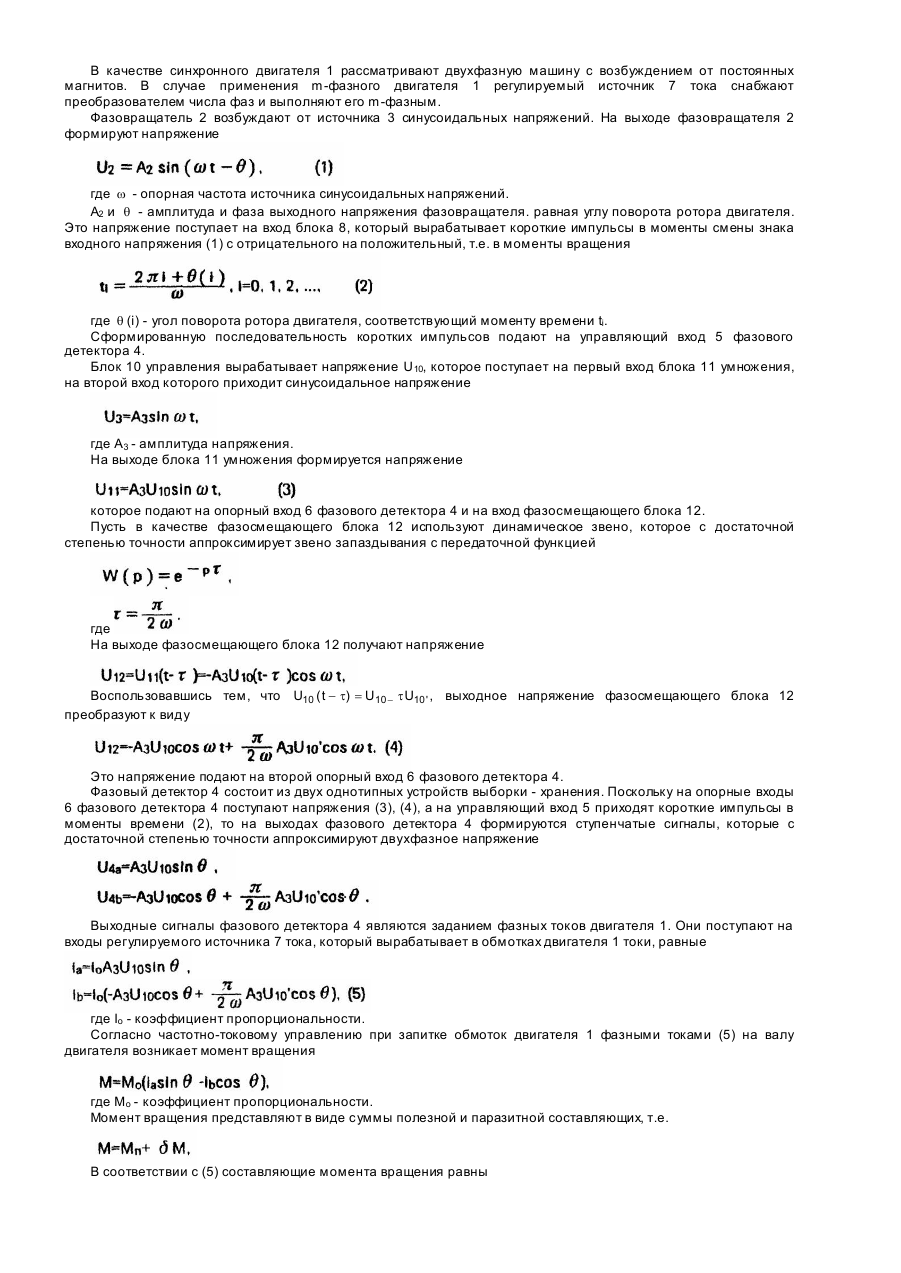
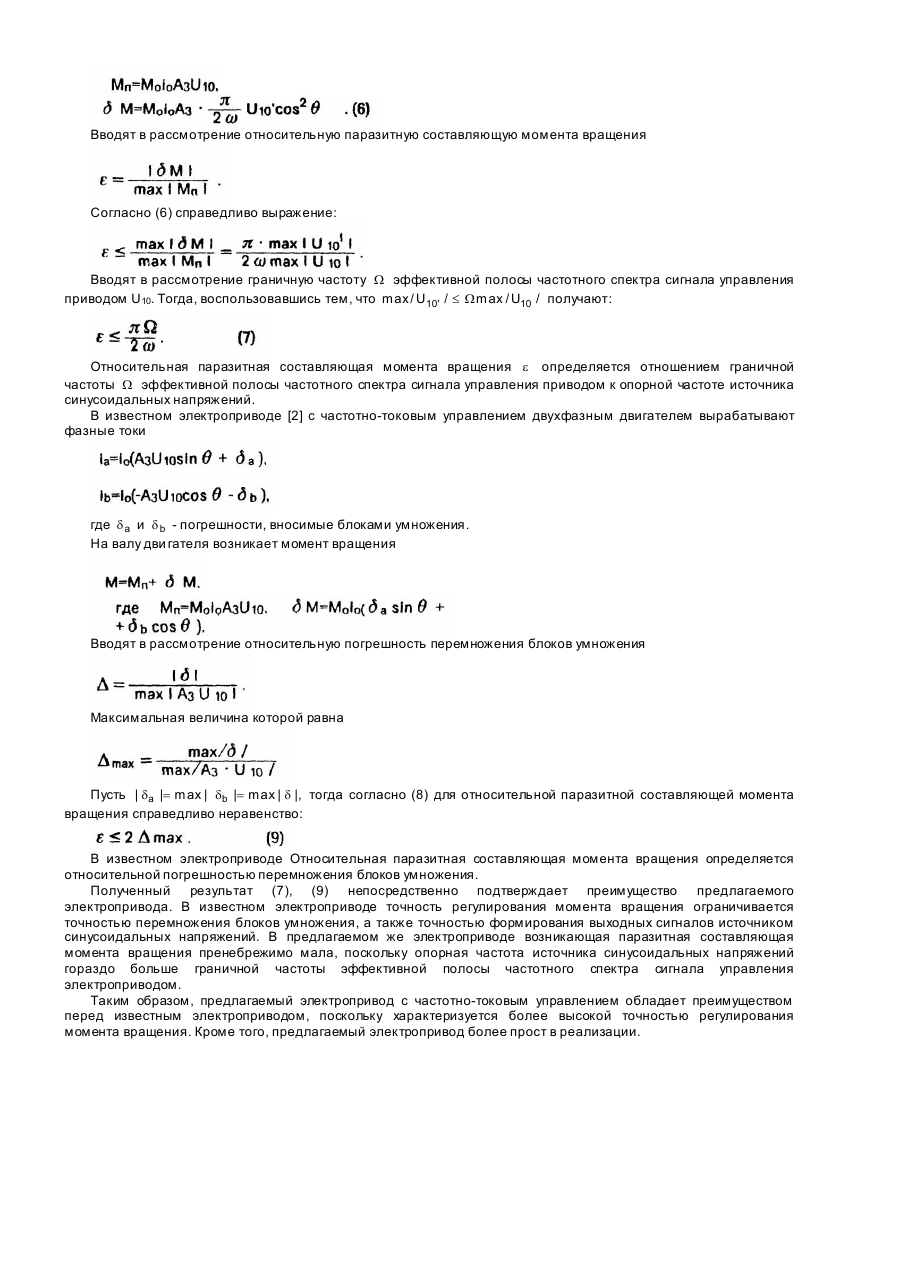
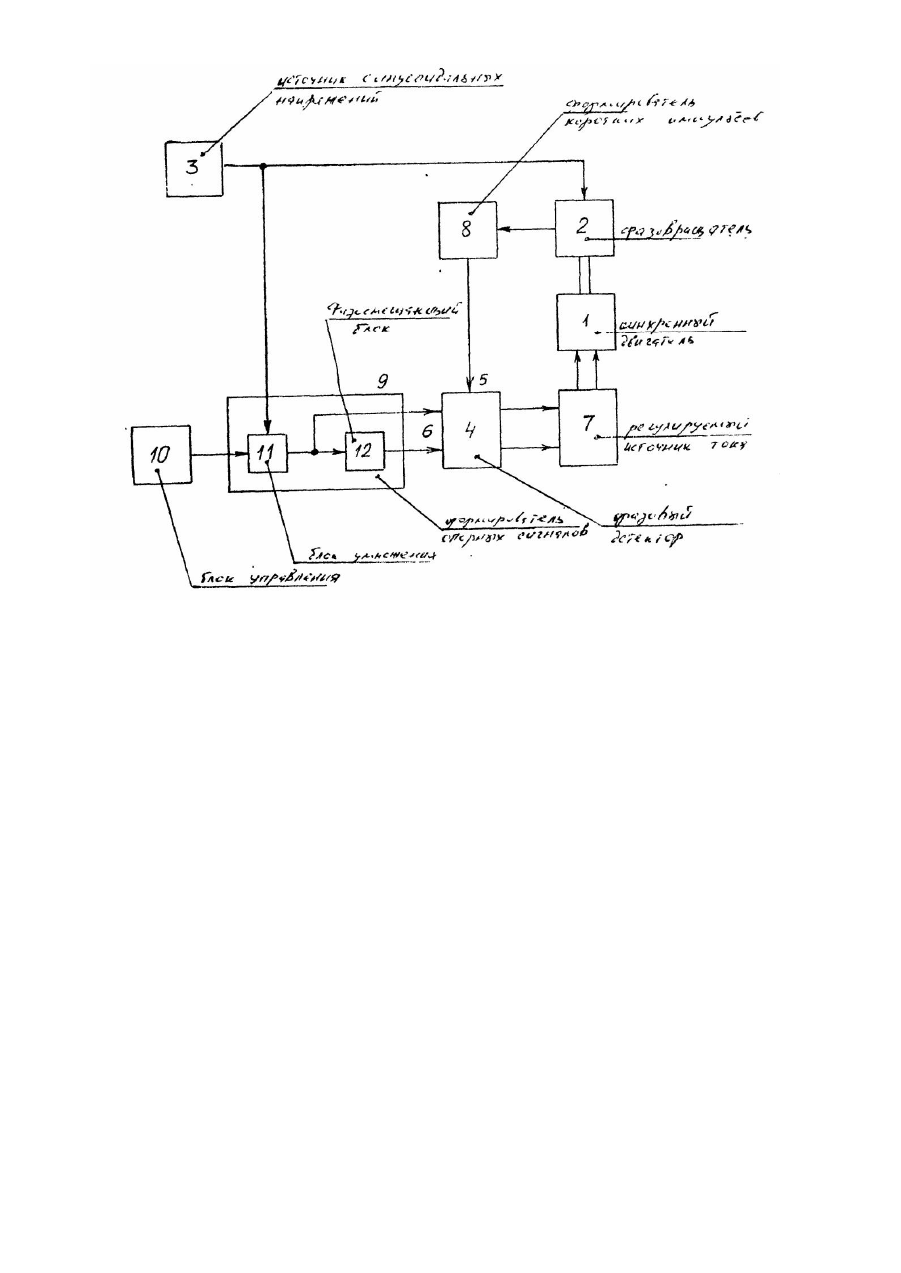
Изобретение относится к электротехнике и может быть использовано в приводах с частотно-токовым управлением, в частности в линейном электроприводе. Известен электропривод с частотно-токовым управлением [1], содержащий синхронный двигатель, фазовращатель, ротор которого механически соединен с ротором двигателя, цепь возбуждения фазовращателя подключена к первому выходу источника синусоидальных напряжений, последовательно соединенные фазовый детектор с управляющим первым и вторым опорными входами и регулируемый источник тока, выходы которого подключены к фазным обмоткам двигателя, формирователь коротких импульсов, подключенный входом к выходу фазовращателя, а вы ходом через элемент и к управляющему входу фазового детектора, формирователь опорных сигналов фазового детектора, подключенный первым входом к выходу блока управления, а выходами к соответствующим опорным входам фазового детектора, второй вход источника синусоидальных напряжений подключен к второму входу формирователя опорных сигналов фазового детектора и второму входу элемента И. При этом формирователь опорных сигналов выполнен на основе управляемого генератора синусоидальных колебаний. В управляемом генераторе начальные условия, задаваемые блоком управления, определяют амплитуду как синусоидального, так и косинусоидального колебаний. Это обеспечивает формирование опорных сигналов фазового детектора с достаточно высокой точностью. Однако короткие импульсы, поступающие на управляющий вход фазового детектора, следуют с частотой, как минимум, в два раза меньше частоты колебаний, приходящих на опорные входы фазового детектора. В силу этого фазовый детектор вносит значительную погрешность детектирования фазных токов. Наиболее близким по технической сущности является электропривод с частотно-токовым управлением [2], содержащий синхронный двигатель, фазовращатель, ротор которого' механически соединен с ротором двигателя, цепь возбуждения фазовращателя подключена к выходу источника синусоидальных напряжений, последовательно соединенные фазовый детектор с управляющим первым и вторым опорными входами и регулируемый источник тока, выходы которого подключены к фазным обмоткам двигателя, формирователь коротких импульсов, подключенный входом к выходу фазовращателя, а выходом к управляющему входу фазового детектора, формирователь опорных сигналов фазового детектора, подключенный входами к выходу блока управления и выходам источника синусоидальных напряжений, а выходами к соответствующим опорным входам фазового детектора. При этом формирователь опорных сигналов содержит блоки умножения. Объединенные первые входы и вторые входы блоков умножения являются входами указанного формирователя, а выходы блоков умножения его выходами. В известном электроприводе короткие импульсы, поступающие на управляющий вход фазового детектора, следуют с частотой опорных сигналов фазового детектора, что позволяет обеспечить достаточно высокую томность детектирования. Однако опорные сигналы фазового детектора формируют с помощью блоков умножения путем умножения каждого выходного сигнала источника синусоидальных напряжений на выходной сигнал блока управления. Неравенство амплитуд вы ходных сигналов источника синусоидальных напряжений, а также погрешности блоков умножения приводят к погрешности формирования опорных сигналов фазового детектора. Это снижает точность формирования фазных токов двигателя, тем самым снижает точность регулирования его момента вращения. В основу изобретения поставлена задача усовершенствовать электропривод с частотно-токовым управлением так, чтобы обеспечить пренебрежимо малую возникающую паразитную составляющую момента вращения, поскольку опорная частота источника синусоидальных напряжений гораздо больше граничной частоты эффективной полосы частотного спектра сигнала управления электроприводом, и за счет этого - более высокую точность регулирования момента вращения. Кроме того, предлагаемый электропривод более прост в реализации. Поставленная задача решается тем, что в электроприводе с частотно-токовым управлением, содержащем синхронный двигатель, фазовращатель, ротор которого механически соединен с ротором двигателя, цепь возбуждения фазовращателя подключена к выходу источника синусоидальных напряжений, последовательно соединенные фазовый детектор с управляющим первым и вторым опорными входами и регулируемый источник тока, выходы которого подключены к фазным обмоткам двигателя, формирователь коротких импульсов, подключенный входом к выходу фазовращателя, а выходом к управляющему входу фазового детектора, формирователь опорных сигналов фазового детектора, подключенный первым входом к выходу блока управления, вторым входом - к выходу источника синусоидальных напряжений, а выходами - к соответствующим опорным входам фазового детектора, при этом формирователь Опорных сигналов содержит блок умножения, входы которого являются входами указанного формирователя, а выход - его первым выходом, согласно изобретению, формирователь опорных сигналов фазового детектора дополнительно содержит фазосмещающий блок, вход которого подключен к выходу блока умножения, а выход образует второй выход формирователя Опорных сигналов фазового детектора, при этом источник синусоидальных напряжений выполнен одноканальным. На чертеже представлена функциональная схема электропривода с частотно-токовым управлением. Электропривод содержит синхронный двигатель 1, фазовращатель 2, ротор которого механически соединен с ротором двигателя 1, а цепь возбуждения подключена к выходу источника 3 синусоидальных напряжений, последовательно соединенные фазовый детектор 4 с управляющим 5 и опорными 6 входами и регулируемый источник 7 тока, выходы которого подключены к фазным обмоткам двигателя 1, формирователь 8 коротких импульсов, подключенный входом к выходу фазовращателя 2, а вы ходом к управляющему входу 5 фазового детектора 4, формирователь 9 опорных сигналов фазового детектора, подключенный первым входом к выходу блока 10 управления, вторым входом - к выходу источника 3 синусоидальных напряжений, а выходами - к опорным входам 6 фазового детектора 4. Формирователь 9 опорных сигналов фазового детектора содержит последовательно соединенные блок 11 умножения и фазосмещающий блок 12. Входами формирователя 9 являются входы блока 11 умножения, а выходами - выход блока. 11 умножения и выход фазосмещающего блока 12. Фазосмещающий блок 12 может быть выполнен на основе дифференцирующего звена или звена запаздывания. Устройство работает следующим образом. В качестве синхронного двигателя 1 рассматривают двухфазную машину с возбуждением от постоянных магнитов. В случае применения m-фазного двигателя 1 регулируемый источник 7 тока снабжают преобразователем числа фаз и выполняют его m-фазным. Фазовращатель 2 возбуждают от источника 3 синусоидальных напряжений. На выходе фазовращателя 2 формируют напряжение где w - опорная частота источника синусоидальных напряжений. A2 и q - амплитуда и фаза выходного напряжения фазовращателя. равная углу поворота ротора двигателя. Это напряжение поступает на вход блока 8, который вырабатывает короткие импульсы в моменты смены знака входного напряжения (1) с отрицательного на положительный, т.е. в моменты вращения где q (i) - угол поворота ротора двигателя, соответствующий моменту времени ti. Сформированную последовательность коротких импульсов подают на управляющий вход 5 фазового детектора 4. Блок 10 управления вырабатывает напряжение U10, которое поступает на первый вход блока 11 умножения, на второй вход которого приходит синусоидальное напряжение где A3 - амплитуда напряжения. На выходе блока 11 умножения формируется напряжение которое подают на опорный вход 6 фазового детектора 4 и на вход фазосмещающего блока 12. Пусть в качестве фазосмещающего блока 12 используют динамическое звено, которое с достаточной степенью точности аппроксимирует звено запаздывания с передаточной функцией где На выходе фазосмещающего блока 12 получают напряжение Воспользовавшись тем, что U10 ( t - t) = U10 - t U10 ' , выходное напряжение фазосмещающего блока 12 преобразуют к виду Это напряжение подают на второй опорный вход 6 фазового детектора 4. Фазовый детектор 4 состоит из двух однотипных устройств выборки - хранения. Поскольку на опорные входы 6 фазового детектора 4 поступают напряжения (3), (4), а на управляющий вход 5 приходят короткие импульсы в моменты времени (2), то на выходах фазового детектора 4 формируются ступенчатые сигналы, которые с достаточной степенью точности аппроксимируют двухфазное напряжение Выходные сигналы фазового детектора 4 являются заданием фазных токов двигателя 1. Они поступают на входы регулируемого источника 7 тока, который вырабатывает в обмотках двигателя 1 токи, равные где Io - коэффициент пропорциональности. Согласно частотно-токовому управлению при запитке обмоток двигателя 1 фазными токами (5) на валу двигателя возникает момент вращения где Мо - коэффициент пропорциональности. Момент вращения представляют в виде суммы полезной и паразитной составляющих, т.е. В соответствии с (5) составляющие момента вращения равны Вводят в рассмотрение относительную паразитную составляющую момента вращения Согласно (6) справедливо выражение: Вводят в рассмотрение граничную частоту W эффективной полосы частотного спектра сигнала управления приводом U10. Тогда, воспользовавшись тем, что max / U10' / £ W max / U10 / получают: Относительная паразитная составляющая момента вращения e определяется отношением граничной частоты W эффективной полосы частотного спектра сигнала управления приводом к опорной частоте источника синусоидальных напряжений. В известном электроприводе [2] с частотно-токовым управлением двухфазным двигателем вырабатывают фазные токи где d a и d b - погрешности, вносимые блоками умножения. На валу дви гателя возникает момент вращения Вводят в рассмотрение относительную погрешность перемножения блоков умножения Максимальная величина которой равна Пусть | da |= max | db |= max | d |, тогда согласно (8) для относительной паразитной составляющей момента вращения справедливо неравенство: В известном электроприводе Относительная паразитная составляющая момента вращения определяется относительной погрешностью перемножения блоков умножения. Полученный результат (7), (9) непосредственно подтверждает преимущество предлагаемого электропривода. В известном электроприводе точность регулирования момента вращения ограничивается точностью перемножения блоков умножения, а также точностью формирования выходных сигналов источником синусоидальных напряжений. В предлагаемом же электроприводе возникающая паразитная составляющая момента вращения пренебрежимо мала, поскольку опорная частота источника синусоидальных напряжений гораздо больше граничной частоты эффективной полосы частотного спектра сигнала управления электроприводом. Таким образом, предлагаемый электропривод с частотно-токовым управлением обладает преимуществом перед известным электроприводом, поскольку характеризуется более высокой точностью регулирования момента вращения. Кроме того, предлагаемый электропривод более прост в реализации.
ДивитисяДодаткова інформація
Назва патенту англійськоюElectric drive with frequency current control
Автори англійськоюYaroslavtsev Mykhailo Ivanovych, Lukashenko Andrii Hermanovych
Назва патенту російськоюЭлектропривод с частотно-токовым управлением
Автори російськоюЯрославцев Михаил Иванович, Лукашенко Андрей Германович
МПК / Мітки
МПК: H02P 27/04
Мітки: електропривід, керуванням, частотно-струмовим
Код посилання
<a href="https://ua.patents.su/4-2945-elektroprivid-z-chastotno-strumovim-keruvannyam.html" target="_blank" rel="follow" title="База патентів України">Електропривід з частотно-струмовим керуванням</a>
Пристрій для вимірювання фазового зсуву
Номер патенту: 457
Опубліковано: 30.04.1993
Автори: Свідлер Ігор Давидович, Токовенко Степан Омелянович
МПК: G01R 25/00
Мітки: зсуву, фазового, вимірювання, пристрій
Формула / Реферат:
Формула изобретенияУстройство для измерения фазового сдвига, содержащее триггерный фазометр, выход которого является первым выходом устройства и реверсивный счетчик, выход которого является вторым выходом устройства, отличающееся тем, что, с целью повышения надежности устройства, в него дополнительно введены задатчик двух чисел, два блока сравнения двух чисел, два элемента задержки и два элемента И, причем выход триггерного фазометра...
Спосіб частотного керування асинхронним двигуном
Номер патенту: 2944
Опубліковано: 26.12.1994
Автор: Ярославцев Михайло Іванович
МПК: H02P 27/04
Мітки: спосіб, керування, двигуном, частотного, асинхронним
Формула / Реферат:
Способ частотного управления асинхронным двигателем, при котором регулируют частоту и величину напряжения питания асинхронного двигателя путем широтно-импульсного модулирования постоянного напряжения питания инвертора, обеспечивая закон регулирования U=Uo+Kf, отличающийся тем, что широтно-импульсное модулирование осуществляют путем дополнительного регулирования длительности импульсов в каждой полуволне напряжения питания по следующему...
Пристрій для вимірювання швидкості переміщення
Номер патенту: 2063
Опубліковано: 20.12.1994
Автор: Ярославцев Михайло Іванович
МПК: G01P 3/42
Мітки: вимірювання, пристрій, швидкості, переміщення
Формула / Реферат:
1. Устройство для измерения скорости перемещения, содержащее генератор эталонной частоты, делитель частоты и последовательно соединительные блок питания, фазовращатель, компаратор, многоканальный распределитель импульсов, многоканальный формирователь опорных импульсов, многовходовую логическую схему и блок осреднения, выход генератора эталонной частоты соединен с дополнительным входом многоканального формирователя опорных импульсов,...
Дводвигунний електропривід

Номер патенту: 1603
Опубліковано: 25.10.1994
Автор: Ярославцев Михайло Іванович
МПК: H02P 5/46
Мітки: дводвигунний, електропривід
Формула / Реферат:
Двухдвигательный электропривод, содержащий первый управляемый двигатель с установленными на его валу первым датчиком положения и первым датчиком скорости, подключенный к выходу первого регулятора тока, второй управляемый двигатель с установленными на его валу вторым датчиком положения и вторым датчиком скорости, подключенный к выходу второго регулятора тока, регулятор положения, подключенный первым входом к выходу первого датчика...
Стабілізатор струму в обмотці електродвигуна змінного струму
Номер патенту: 1829
Опубліковано: 20.12.1994
Автор: Ярославцев Михайло Іванович
МПК: G05F 1/56
Мітки: змінного, обмотці, стабілізатор, електродвигуна, струму
Формула / Реферат:
Стабилизатор тока в обмотке электродвигателя переменного тока, содержащий формирователь сигналов управления, первый вход которого соединен с выходом задатчика момента вращения, второй вход — с выходом датчика положения ротора электродвигателя, а токозадающий выход — с опорным входом элемента сравнения, гистерезисный релейный элемент, сигнальный вход которого подключен к выходу элемента сравнения, ключевой преобразователь напряжения,...
Попередній патент: Спосіб частотного керування асинхронним двигуном
Наступний патент: Спосіб одержання металорізального інструменту
Випадковий патент: Фторовмісні поліуретаносечовини як плівкотвірні полімерні матеріали та покриття на їх основі медичного призначення