Привод транспортного засобу

Формула / Реферат
Привод транспортного средства, содержащий шарнирный четырехзвенник, в котором коромысло соединено с рамой через кривошип и рычаг, установленный на опоре, причем кривошип имеет ведущую звездочку на ведущем валу, педаль установлена на коромысле, а длина коромысла равна 1,1-1,3 длины кривошипа, отличающийся тем, что четырехзвенник выполнен в виде шарнирного параллелограмма, в котором неподвижная опора расположена в любой точке окружности, образованной радиусом ведущего вала, равным 1,1-1,3 длины кривошипа.
Текст
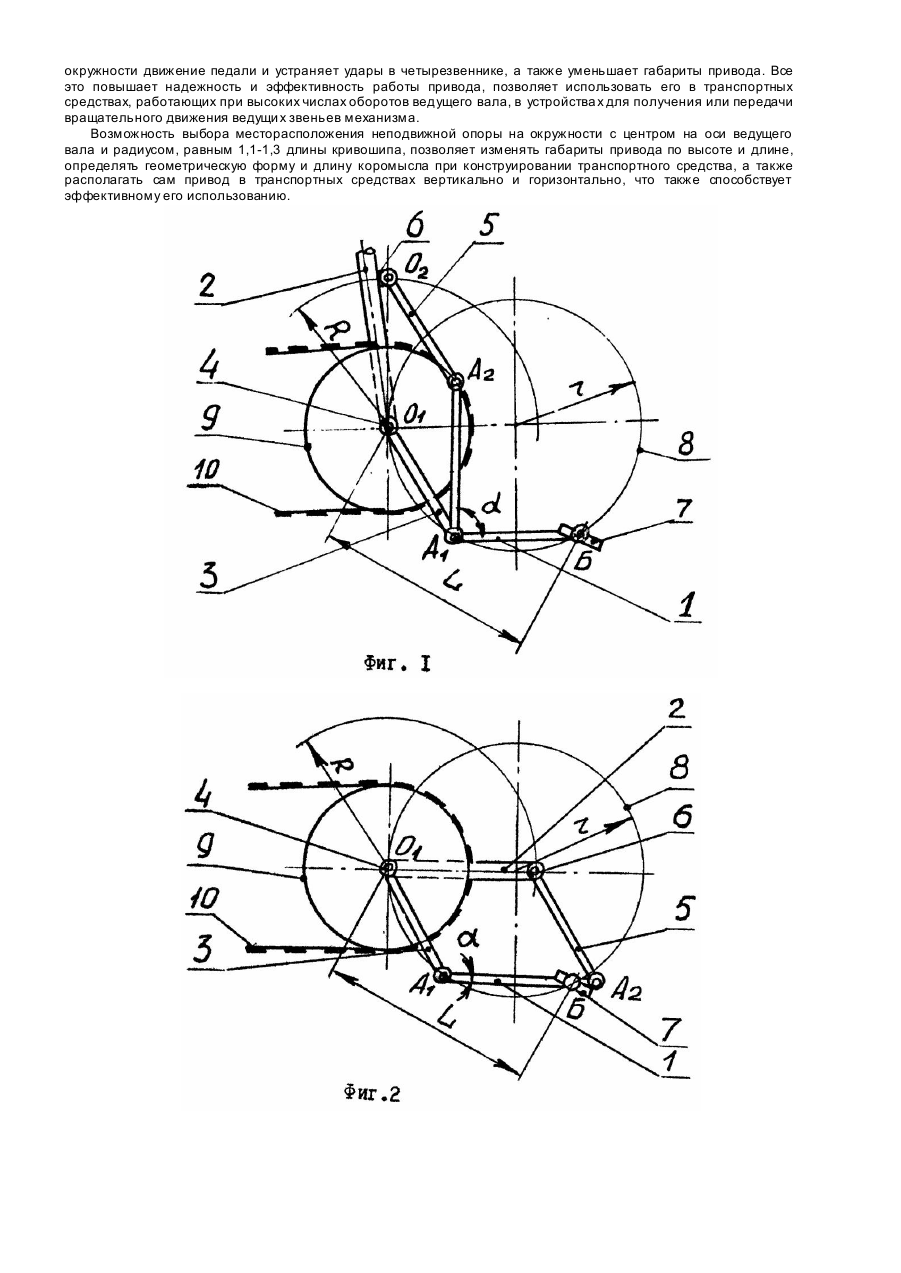
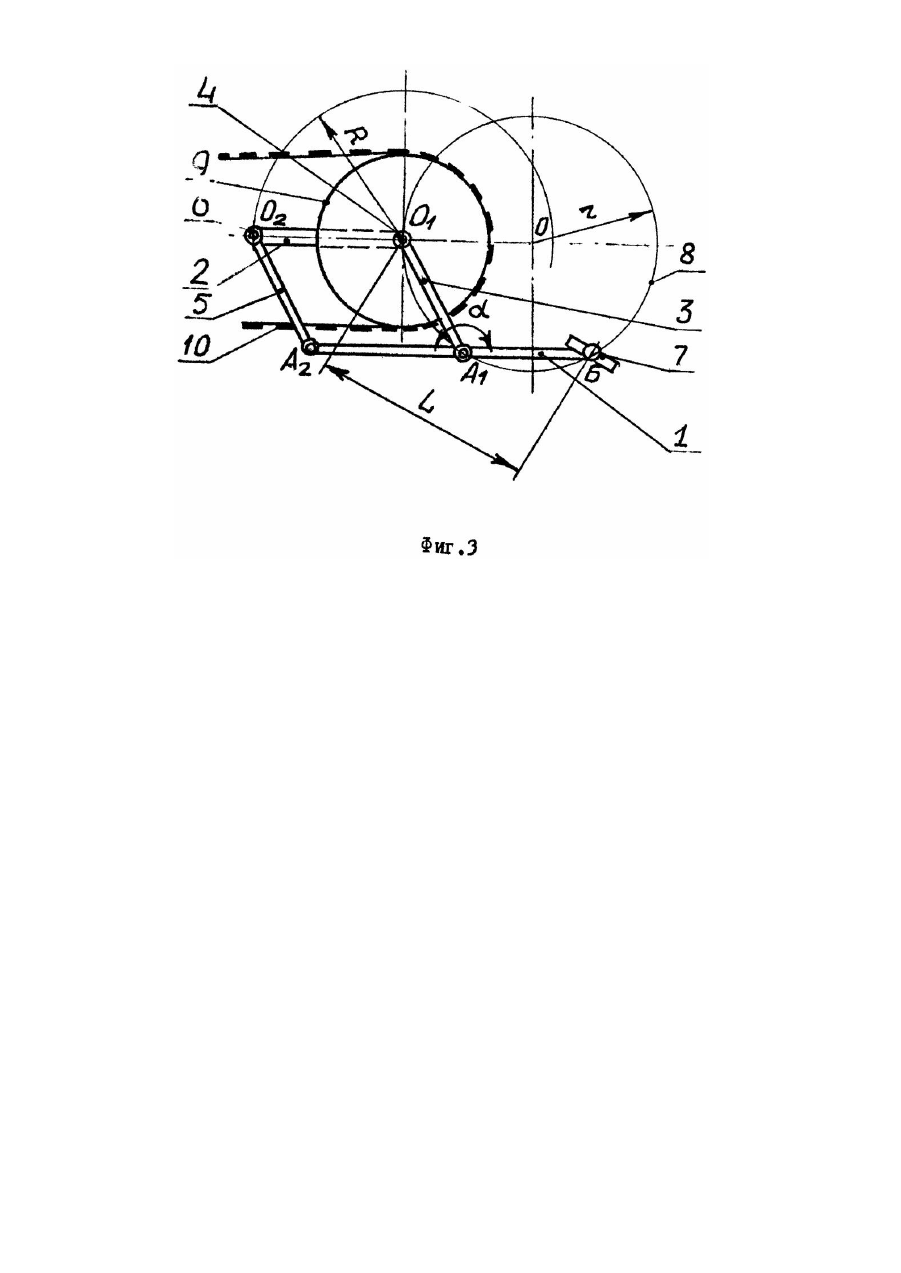
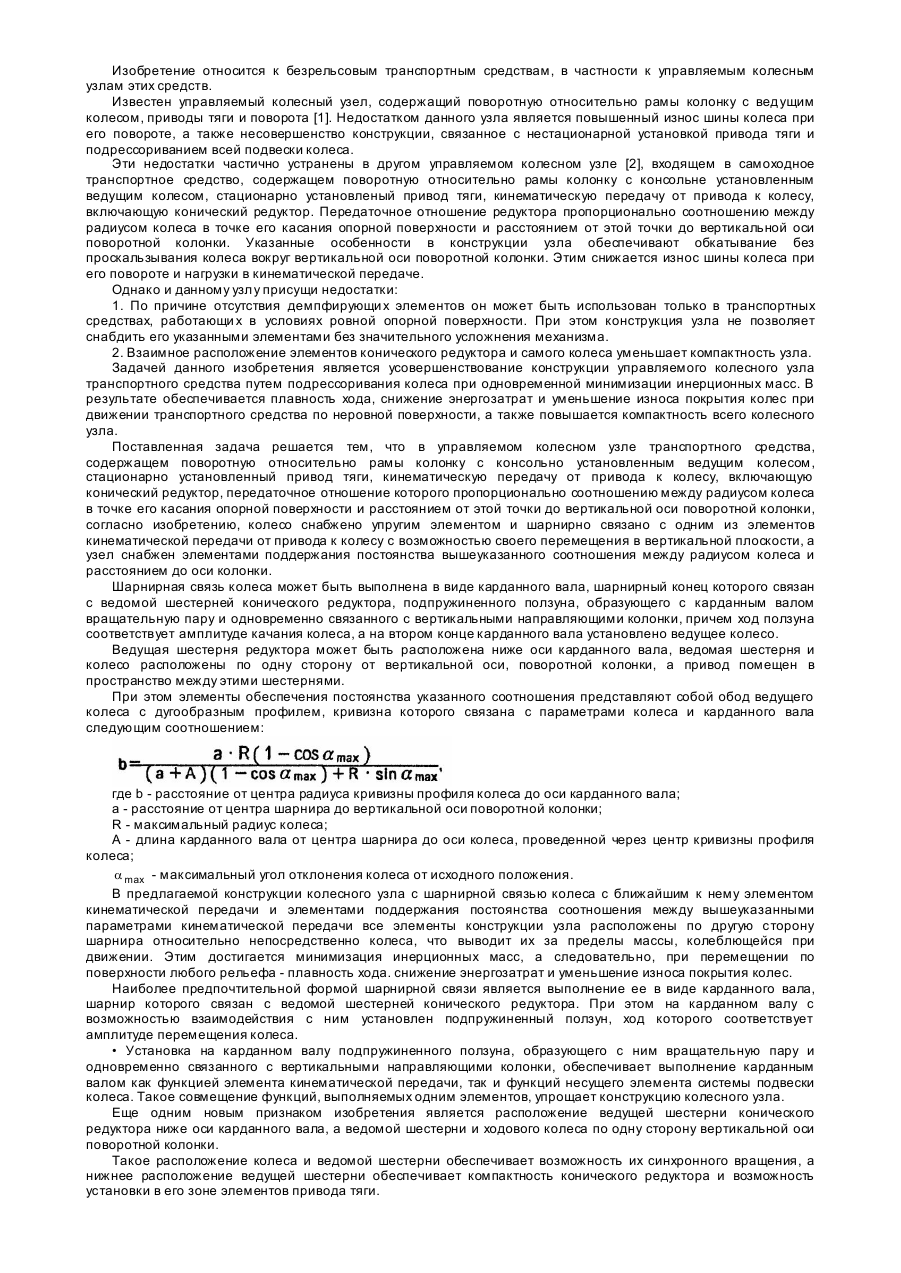
Изобретение относится к транспортной технике, а именно к транспортным средствам, приводимым в движение мускульной силой, и может быть использовано в устройства х для получения или передачи вращательного движения ведущи х звеньев механизма. Наиболее близким по технической сущности к заявляемому изобретению является педальный привод транспортного средства, содержащий шарнирный четырехзвенник, в котором коромысло соединено с рамой через кривошип и рычаг, причем кривошип имеет ведущую звездочку на ведущем валу, рычаг посажен на неподвижную опору рамы, педаль установлена на коромысле, а длина коромысла между осями шарниров, посредством которых оно соединено с рычагом и кривошипом, равна 1,1-1,3 длины кривошипа, длина рычага равна расстоянию от оси ведущего вала до оси неподвижной опоры, неподвижная опора размещена на расстоянии 2,5-3,0 длины кривошипа над осью ведущего вала и смещена к заднему колесу на расстояние 1,3-2,0 длины кривошипа [1]. Недостатком известного привода является то, что длина рычага, равная расстоянию от оси ведущего вала до оси неподвижной опоры, которая размещена на расстоянии 2,5-3,0 длины кривошипа над осью ведуще го вала и смещена к заднему колесу на расстояние 1,3-2,0 длины кривошипа, обусловливает траекторию педали с резко изменяющимся радиусом кривизны, поэтому известный привод может быть использован только в транспортных средствах, работающих с числом оборотов ведущего вала не более 80 в минуту, т.к. при больших числах оборотов при прохождении педалью изломов траектории в четырехзвеннике возникают удары. Кроме того, рычаг большой длины обусловливает громоздкость привода. Все это снижает надежность и эффективность работы привода. Задачей изобретения является усовершенствование привода транспортного средства путем расположения неподвижной опоры рамы в четырехзвеннике таким образом, чтобы обеспечить плавное движение педали по окружности, что позволит внедрить привод с крутящим моментом, вдвое большим по сравнению с существующим на гоночные велосипеды, не меняя их базу. Поставленная задача решается тем, что в приводе транспортного средства, выполненном в виде шарнирного четырехзвенника, в котором коромысло соединено с рамой через кривошип и рычаг, причем кривошип имеет ведущую звездочку на ведущем валу, рычаг посажен на неподвижную опору рамы, педаль установлена на коромысле, а длина коромысла между осями шарниров, посредством которых оно соединено с рычагом и кривошипом, равна 1,1-1,3 длины кривошипа, согласно изобретению, четырехзвенник выполнен в виде шарнирного параллелограмма, в котором неподвижная опора может быть расположена в любой точке окружности с центром на оси ведущего вала и радиусом, равным 1,1-1,3 длины кривошипа. Выполнение привода в виде шарнирного параллелограмма, в котором неподвижная опора может быть расположена в любой точке окружности с центром на оси ведущего вала и радиусом, равным 1,1-1,3 длины кривошипа, обеспечивает плавное движение педали по окружности, позволяет, располагая неподвижную опору над осью ведущего вала или впереди оси ведущего вала или сзади нее, изменять габариты самого привода в нужном направлении, а также монтировать ведущее звено с педалью на опоре и внедрить привод, обладающий крутящим моментом, вдвое большим по сравнению с существующим на гоночные велосипеды при небольших переделках конструкции рамы, не меняя базу велосипеда и традиционную классическую посадку гонщика. Все это повышает надежность и эффективность работы привода. На фиг. 1 изображен привод транспортного средства с расположением неподвижной опоры над осью ведущего вала. На фиг. 2 и фиг. 3 изображен привод с расположением неподвижной опоры на горизонтали впереди оси ведущего вала и сзади нее, соответственно. Привод содержит шарнирный четырехзвенник, в котором коромысло 1 соединено с рамой 2 через кривошип 3 с ведущим валом 4 и рычаг 5, посаженный на неподвижную опору 6 рамы 2. Педаль 7 установлена на коромысле 1 с возможностью движения по траектории 8 с условным центром О. Привод имеет ведущую звездочку 9 с цепью 10. Ось O1 ведущего вала 4 и ось O2 неподвижной опоры 6 образуют неподвижное звено O1O 2 четырехзвенника, а оси А1 и А2 шарниров, соединяющих коромысло 1 с кривошипом 3 и рычагом 5, определяют геометрию четырехзвенника, где длина кривошипа 3 равна длине рычага 5: О1A1= О 2 A2, а длина коромысла 1 между осями шарниров A1 A2 равна расстоянию от оси O1 ведущего вала 4 до оси О2 неподвижной опоры 6: A1 A2=O 1О2 . Получен шарнирный параллелограмм, в котором А1 А2=(1,1-1,3)О1 А2, где длина кривошипа 3 О1А1 является базовой. Ось О2 неподвижной опоры 6 может быть расположена в любой точке окружности с центром на оси O1 ведущего вала 4 и радиусом R, равным 1,1-1,3 длины кривошипа 3. Это определяет геометрическую форму коромысла 1 и его длину. Коромысло выполнено из 2-х плеч A1 A2 и А1Б, соединенных между собой в шарнире А1 под положительным углом a , находящимся в интервале от 0° до 180°. На фиг. 1 угол a равен 90°, на фиг. 2 - 0°, на фиг. 3 - 180°. Соответственно, наибольшую длину коромысло 1 имеет, например, в конструкции, изображенной на фиг. 1, 3, а наименьшую на фиг. 2. В предложенном приводе ведущим звеном, выполняющим функцию силового рычага, является расстояние от оси O1 ведущего вала 4 до оси Б педали 7, равное сумме длин кривошипа 3 и плеча А1Б коромысла 1: L=О1Б= О1 А1+А1Б. Так как в нашем случае принято, что длина кривошипа 3 равна длине плеча А1Б коромысла 1, то O1 O=O1 A1. Привод работает следующим образом. В шарнирном параллелограмме с неподвижным звеном O1O2 при вращении кривошипа 3 шарниры А1 А2 и все точки коромысла 1 вращаются по окружностям с радиусом r, равным длине кривошипа 3, при этом траектория 8 педали 7 также является окружностью с центром О на продольной оси транспортного средства с радиусом, равным длине кривошипа 3. Так как в нашем случае принято ОА1= А1Б, то O1O=O1 A1. При движении педали 7 вперед длина ведущего звена О1Б увеличивается и достигает наибольшего значения при горизонтальном положении кривошипа 3: О1Б=О1 А1+А1Б. При движении педали 7 назад длина ведущего звена O1Б уменьшается и достигает наименьшего значения, также, при горизонтальном положении кривошипа 3: О1Б=А1Б1-А1Б. Выполнение привода в виде шарнирного параллелограмма трансформирует траекторию педали с резко изменяющимся радиусом кривизны на траекторию с постоянным радиусом, что обеспечивает плавное по окружности движение педали и устраняет удары в четырезвеннике, а также уменьшает габариты привода. Все это повышает надежность и эффективность работы привода, позволяет использовать его в транспортных средствах, работающих при высоких числах оборотов ведущего вала, в устройства х для получения или передачи вращательного движения ведущи х звеньев механизма. Возможность выбора месторасположения неподвижной опоры на окружности с центром на оси ведущего вала и радиусом, равным 1,1-1,3 длины кривошипа, позволяет изменять габариты привода по высоте и длине, определять геометрическую форму и длину коромысла при конструировании транспортного средства, а также располагать сам привод в транспортных средствах вертикально и горизонтально, что также способствует эффективному его использованию.
ДивитисяДодаткова інформація
Назва патенту англійськоюDrive of transportation facility
Автори англійськоюYehorov Volodymyr Oleksiiovych
Назва патенту російськоюПривод транспортного средства
Автори російськоюЕгоров Владимир Алексеевич
МПК / Мітки
МПК: B62M 1/00
Мітки: засобу, привод, транспортного
Код посилання
<a href="https://ua.patents.su/3-3356-privod-transportnogo-zasobu.html" target="_blank" rel="follow" title="База патентів України">Привод транспортного засобу</a>
Керований колісний вузол транспортного засобу
Номер патенту: 869
Опубліковано: 15.12.1993
Автори: Субботін Юрій Петрович, Кельін Олексій Димитрович, Гренадер Михайло Юхимович, Самонін Анатолій Васильович, Володарський Віктор Тимофійович
МПК: B62D 7/14
Мітки: транспортного, керований, вузол, засобу, колісний
Формула / Реферат:
1. Управляемый колесный узел транспортного средства, содержащий поворотную относительно рамы колонку с консольно установленным ведущим колесом, стационарно установленный привод тяги, кинематическую передачу от привода к колесу, включающую конический редуктор, передаточное отношение которого пропорционально соотношению между радиусом колеса в точке его касания опорной поверхности и расстоянием от этой точки до вертикальной оси поворотной...
Опора рами рейкового транспортного засобу на візок

Номер патенту: 2588
Опубліковано: 26.12.1994
Автори: Руденко Олександр Олександрович, Дудка Анатолій Іванович, Кауров Володимир Васильович, Марченко Олександр Федорович, Свирський Йосип Борухович, Іоффе Данило Борисович
МПК: B61F 5/02
Мітки: візок, опора, рами, рейкового, транспортного, засобу
Формула / Реферат:
Опора рамы рельсового транспортного средства на тележку, содержащая закрепленные на них соответственно верхнюю и нижнюю опорные плиты с зубчатыми рейками, с которыми зацеплен зубчатый элемент, связанный с размещенными между опорными плитами телами качения, имеющими цилиндрические опорные поверхности, отличающаяся тем, что, с целью повышения надежности и улучшения вписывания платформы в кривые участки железнодорожного пути, она снабжена...
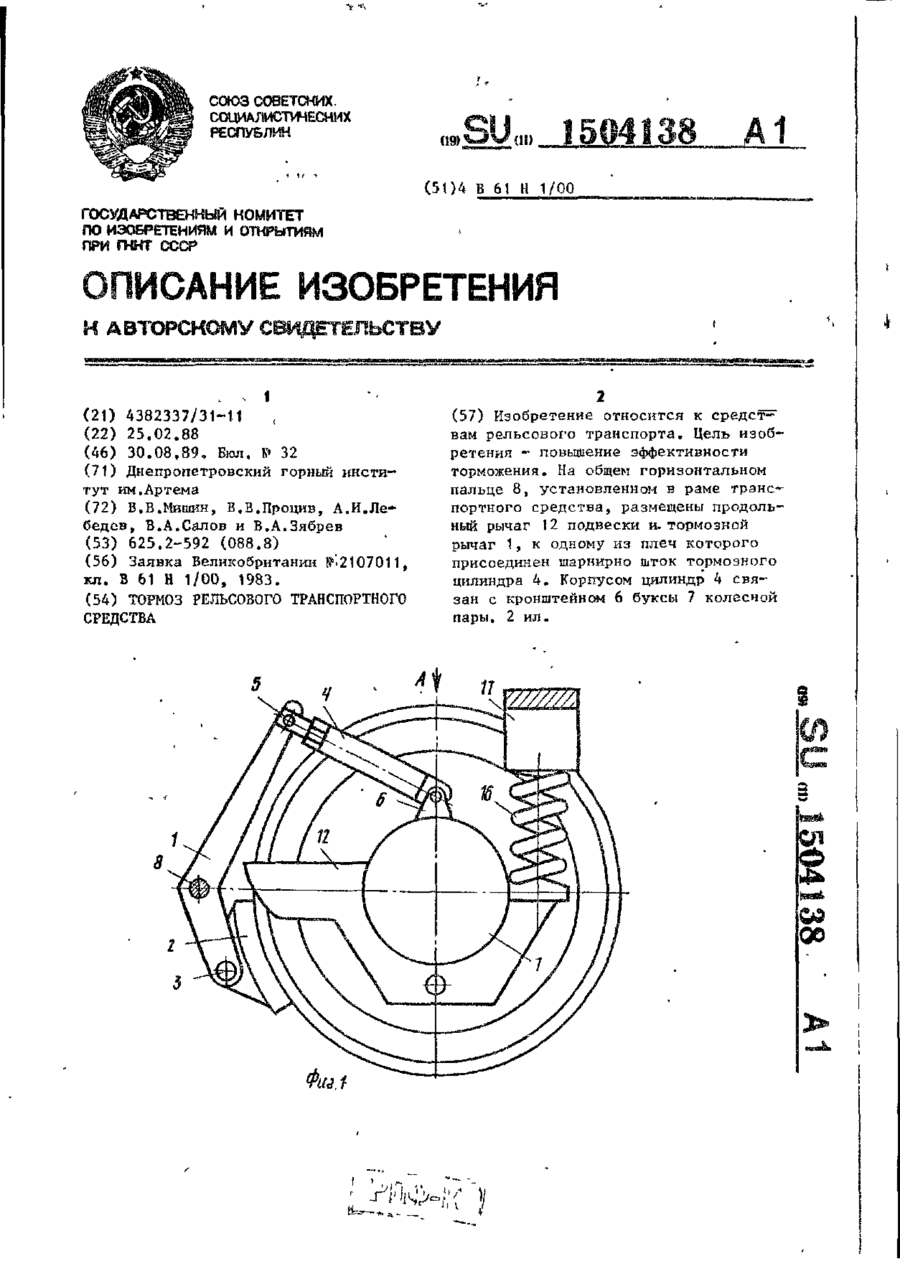
Гальмо рейкового транспортного засобу
Номер патенту: 4402
Опубліковано: 27.12.1994
Автори: Мішин Володимир Васильович, Зябрев Володимир Олександрович, Салов Володимир Олександрович, Проців Володимир Васильович, Лебедев Олександр Іванович
МПК: B61H 1/00
Мітки: гальмо, рейкового, засобу, транспортного
Формула / Реферат:
Тормоз рельсового транспортного средства, содержащий башмак с колодкой, шарнирно связанный с тормозным рычагом, шарнирно установленным на раме транспортного средства и соединенным посредством пальца с продольным рычагом подвески, связывающей буксу колесной пары с рамой транспортного средства, и тормозной цилиндр, шток которого соединен с тормозным рычагом, отличающийся тем, что, с целью повышения эффективности торможения, тормозной рычаг...
Пристрій для управління зчепленням та передачею транспортного засобу
Номер патенту: 1668
Опубліковано: 25.10.1994
Автор: Чутчев Микола Григорович
МПК: B60W 10/02, B60W 10/10
Мітки: передачею, транспортного, зчепленням, засобу, пристрій, управління
Формула / Реферат:
(57) Устройство для управления сцеплением и передачей транспортного средства, содержащее педаль управления, кинематически связанную с рычагом управления сцеплением с устройством для его регулировки и механизмом управления коробкой передач с вилками переключения, отличающееся тем, что, с целью облегчения управления, оно снабжено второй педалью управления, механизм управления коробкой передач снабжен кулачковым валом, резьбовой втулкой,...
Зштовхуючий перевантажуючий пристрій для обслуговування транспортного засобу
Номер патенту: 153
Опубліковано: 30.04.1993
Автори: Володарський Віктор Тимофійович, Самонін Анатолій Васильович, Кохан Іван Михайлович, Гренадер Михайло Юхимович, Шнейдер Володимир Львович
МПК: B65G 47/74
Мітки: засобу, перевантажуючий, обслуговування, транспортного, пристрій, зштовхуючий
Формула / Реферат:
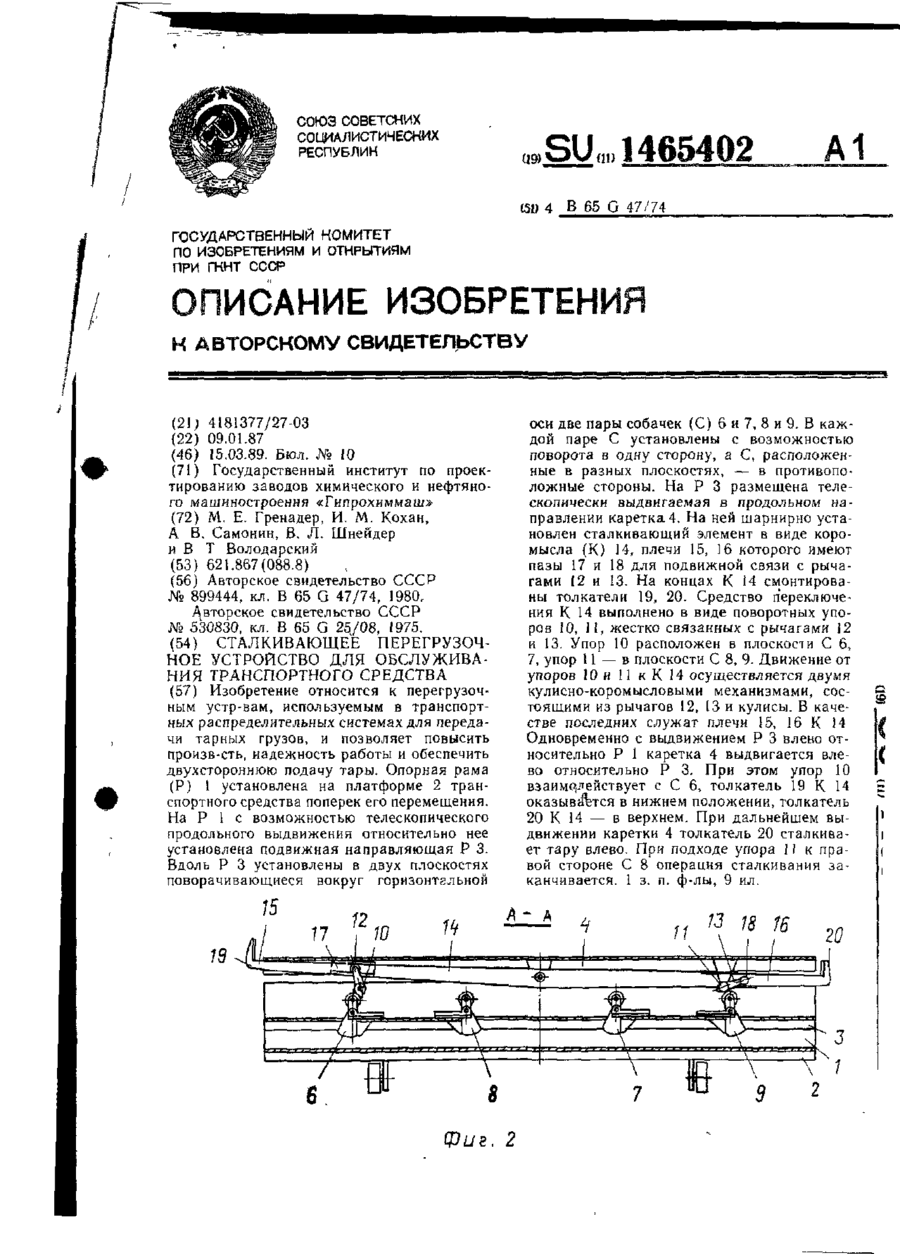
Формула изобретения1. Сталкивающее перегрузочное устройство для обслуживания транспортного средства, включающее опорную раму, выдвижную поперек перемещения транспортного средства каретку, на которой шарнирно установлен сталкивающий элемент с толкателями, и средство переключения сталкивающего элемента, отличающееся тем, что, с целью повышения производительности, надежности работы и обеспечения двухсторонней подачи тары, выдвижная...
Попередній патент: Спосіб одержання метанолу
Наступний патент: Дощувальний апарат
Випадковий патент: Спосіб пластики поперечного синуса