Спосіб прополки просапних культур
Номер патенту: 33759
Опубліковано: 10.07.2008
Автори: Морщавка Сергій Володимирович, Піза Дмитро Макарович
Формула / Реферат
Спосіб прополки просапних культур, заснований на розпізнаванні рослин і знищенні бур'янів, по якому у напрямі рослин випромінюють електромагнітні зондуючі сигнали на N частотах, здійснюють прийом віддзеркалених сигналів, виконують їх обробку та розпізнавання, при цьому, якщо зондуючі сигнали віддзеркалені від корисних рослин, то керовані лапи культиватора виводять з зони рядків у міжряддя, інакше - їх вводять в зону рядків, який відрізняється тим, що кожну із рослин, що підлягає розпізнаванню, опромінюють з одного боку, а віддзеркалені від неї сигнали приймають з іншого боку.
Текст
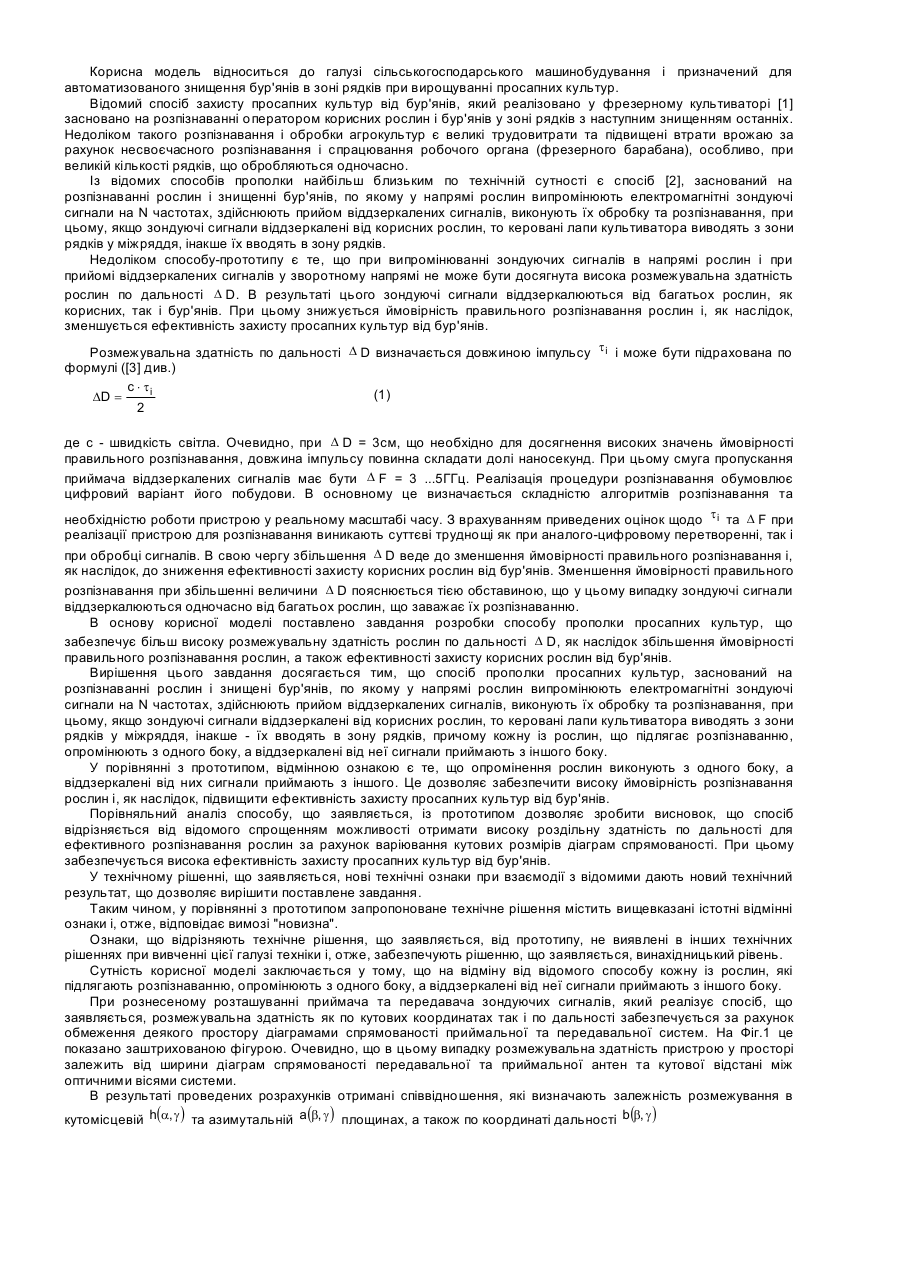
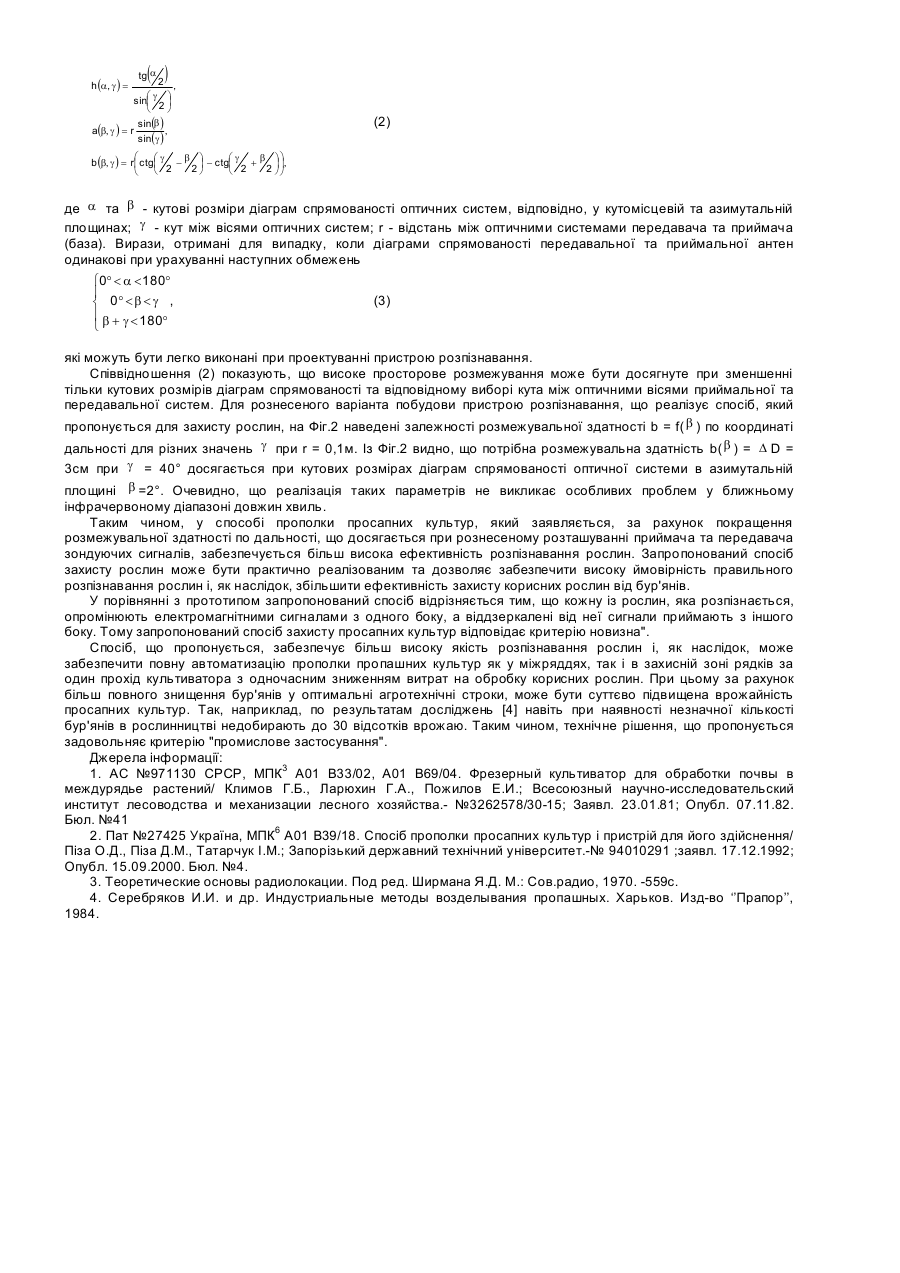
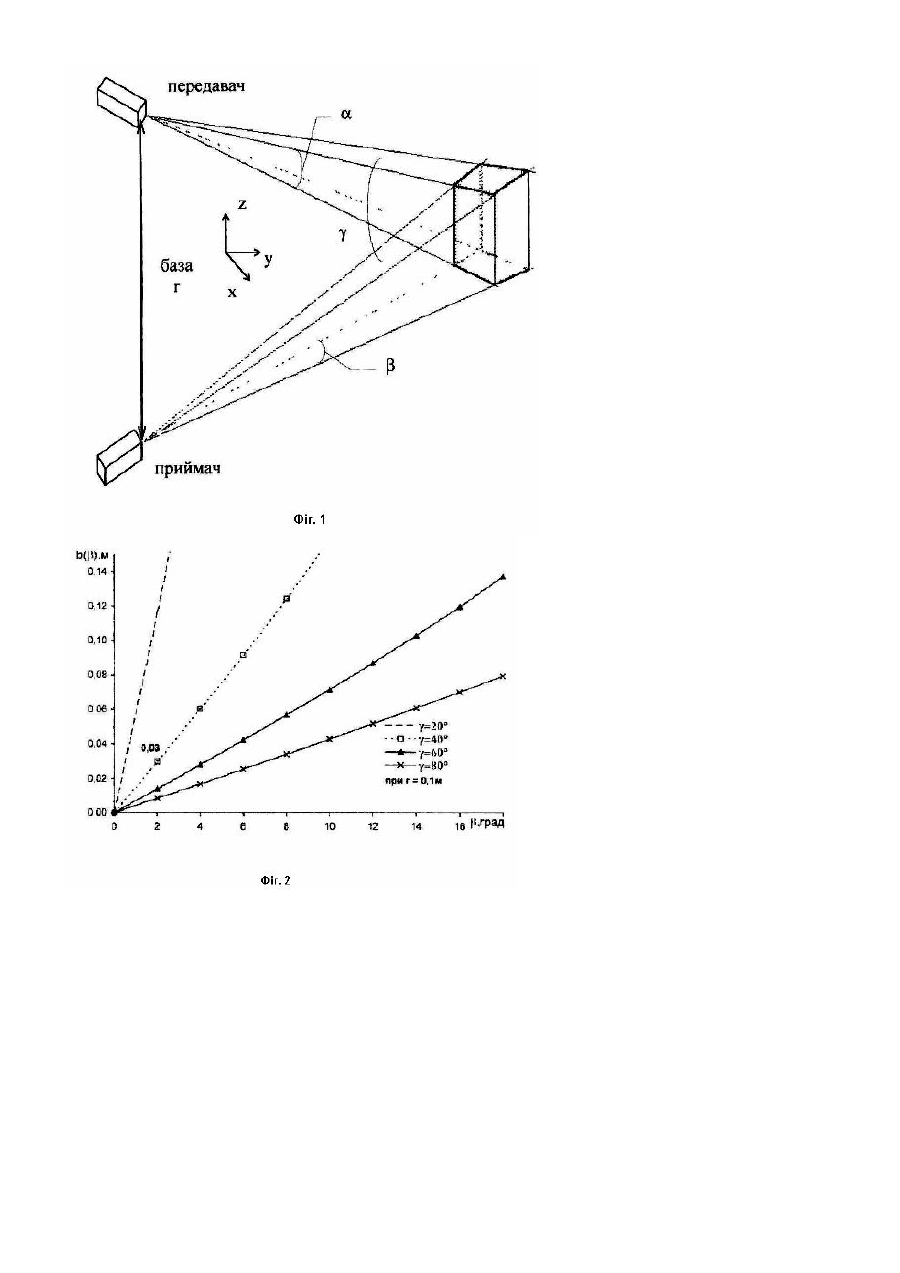
Корисна модель відноситься до галузі сільськогосподарського машинобудування і призначений для автоматизованого знищення бур'янів в зоні рядків при вирощуванні просапних культур. Відомий спосіб захисту просапних культур від бур'янів, який реалізовано у фрезерному культиваторі [1] засновано на розпізнаванні оператором корисних рослин і бур'янів у зоні рядків з наступним знищенням останніх. Недоліком такого розпізнавання і обробки агрокультур є великі трудовитрати та підвищені втрати врожаю за рахунок несвоєчасного розпізнавання і спрацювання робочого органа (фрезерного барабана), особливо, при великій кількості рядків, що обробляються одночасно. Із відомих способів прополки найбільш близьким по технічній сутності є спосіб [2], заснований на розпізнаванні рослин і знищенні бур'янів, по якому у напрямі рослин випромінюють електромагнітні зондуючі сигнали на N частотах, здійснюють прийом віддзеркалених сигналів, виконують їх обробку та розпізнавання, при цьому, якщо зондуючі сигнали віддзеркалені від корисних рослин, то керовані лапи культиватора виводять з зони рядків у міжряддя, інакше їх вводять в зону рядків. Недоліком способу-прототипу є те, що при випромінюванні зондуючих сигналів в напрямі рослин і при прийомі віддзеркалених сигналів у зворотному напрямі не може бути досягнута висока розмежувальна здатність рослин по дальності D D. В результаті цього зондуючі сигнали віддзеркалюються від багатьох рослин, як корисних, так і бур'янів. При цьому знижується ймовірність правильного розпізнавання рослин і, як наслідок, зменшується ефективність захисту просапних культур від бур'янів. Розмежувальна здатність по дальності D D визначається довжиною імпульсу t i і може бути підрахована по формулі ([3] див.) c × ti DD = 2 (1) де с - швидкість світла. Очевидно, при D D = 3см, що необхідно для досягнення високих значень ймовірності правильного розпізнавання, довжина імпульсу повинна складати долі наносекунд. При цьому смуга пропускання приймача віддзеркалених сигналів має бути D F = 3 ...5ГГц. Реалізація процедури розпізнавання обумовлює цифровий варіант його побудови. В основному це визначається складністю алгоритмів розпізнавання та необхідністю роботи пристрою у реальному масштабі часу. З врахуванням приведених оцінок щодо t i та D F при реалізації пристрою для розпізнавання виникають суттєві труднощі як при аналого-цифровому перетворенні, так і при обробці сигналів. В свою чергу збільшення D D веде до зменшення ймовірності правильного розпізнавання і, як наслідок, до зниження ефективності захисту корисних рослин від бур'янів. Зменшення ймовірності правильного розпізнавання при збільшенні величини D D пояснюється тією обставиною, що у цьому випадку зондуючі сигнали віддзеркалюються одночасно від багатьох рослин, що заважає їх розпізнаванню. В основу корисної моделі поставлено завдання розробки способу прополки просапних культур, що забезпечує більш високу розмежувальну здатність рослин по дальності D D, як наслідок збільшення ймовірності правильного розпізнавання рослин, а також ефективності захисту корисних рослин від бур'янів. Вирішення цього завдання досягається тим, що спосіб прополки просапних культур, заснований на розпізнаванні рослин і знищені бур'янів, по якому у напрямі рослин випромінюють електромагнітні зондуючі сигнали на N частотах, здійснюють прийом віддзеркалених сигналів, виконують їх обробку та розпізнавання, при цьому, якщо зондуючі сигнали віддзеркалені від корисних рослин, то керовані лапи культиватора виводять з зони рядків у міжряддя, інакше - їх вводять в зону рядків, причому кожну із рослин, що підлягає розпізнаванню, опромінюють з одного боку, а віддзеркалені від неї сигнали приймають з іншого боку. У порівнянні з прототипом, відмінною ознакою є те, що опромінення рослин виконують з одного боку, а віддзеркалені від них сигнали приймають з іншого. Це дозволяє забезпечити високу ймовірність розпізнавання рослин і, як наслідок, підвищити ефективність захисту просапних культур від бур'янів. Порівняльний аналіз способу, що заявляється, із прототипом дозволяє зробити висновок, що спосіб відрізняється від відомого спрощенням можливості отримати високу роздільну здатність по дальності для ефективного розпізнавання рослин за рахунок варіювання кутових розмірів діаграм спрямованості. При цьому забезпечується висока ефективність захисту просапних культур від бур'янів. У технічному рішенні, що заявляється, нові технічні ознаки при взаємодії з відомими дають новий технічний результат, що дозволяє вирішити поставлене завдання. Таким чином, у порівнянні з прототипом запропоноване технічне рішення містить вищевказані істотні відмінні ознаки і, отже, відповідає вимозі "новизна". Ознаки, що відрізняють технічне рішення, що заявляється, від прототипу, не виявлені в інших технічних рішеннях при вивченні цієї галузі техніки і, отже, забезпечують рішенню, що заявляється, винахідницький рівень. Сутність корисної моделі заключається у тому, що на відміну від відомого способу кожну із рослин, які підлягають розпізнаванню, опромінюють з одного боку, а віддзеркалені від неї сигнали приймають з іншого боку. При рознесеному розташуванні приймача та передавача зондуючих сигналів, який реалізує спосіб, що заявляється, розмежувальна здатність як по кутових координатах так і по дальності забезпечується за рахунок обмеження деякого простору діаграмами спрямованості приймальної та передавальної систем. На Фіг.1 це показано заштрихованою фігурою. Очевидно, що в цьому випадку розмежувальна здатність пристрою у просторі залежить від ширини діаграм спрямованості передавальної та приймальної антен та кутової відстані між оптичними вісями системи. В результаті проведених розрахунків отримані співвідношення, які визначають залежність розмежування в кутомісцевій h(a, g ) та азимутальній a(b, g ) площинах, а також по координаті дальності b(b, g ) h (a, g ) = ( ) tg a 2 , sinæ g 2 ö ç ÷ è ø sin(b ) a(b, g ) = r , sin(g ) (2) æ ö b (b, g ) = rç ctgæ g - b ö - ctgæ g + b ö ÷, ç ç 2 2÷ 2 ÷ø ø è ø è è 2 де a та b - кутові розміри діаграм спрямованості оптичних систем, відповідно, у кутомісцевій та азимутальній площинах; g - кут між вісями оптичних систем; r - відстань між оптичними системами передавача та приймача (база). Вирази, отримані для випадку, коли діаграми спрямованості передавальної та приймальної антен одинакові при урахуванні наступних обмежень ì0° < a < 180° ï í 0° < b < g , ï b + g < 180° î (3) які можуть бути легко виконані при проектуванні пристрою розпізнавання. Співвідношення (2) показують, що високе просторове розмежування може бути досягнуте при зменшенні тільки кутових розмірів діаграм спрямованості та відповідному виборі кута між оптичними вісями приймальної та передавальної систем. Для рознесеного варіанта побудови пристрою розпізнавання, що реалізує спосіб, який пропонується для захисту рослин, на Фіг.2 наведені залежності розмежувальної здатності b = f( b ) по координаті дальності для різних значень g при r = 0,1м. Із Фіг.2 видно, що потрібна розмежувальна здатність b( b ) = D D = 3см при g = 40° досягається при кутових розмірах діаграм спрямованості оптичної системи в азимутальній площині b =2°. Очевидно, що реалізація таких параметрів не викликає особливих проблем у ближньому інфрачервоному діапазоні довжин хвиль. Таким чином, у способі прополки просапних культур, який заявляється, за рахунок покращення розмежувальної здатності по дальності, що досягається при рознесеному розташуванні приймача та передавача зондуючих сигналів, забезпечується більш висока ефективність розпізнавання рослин. Запропонований спосіб захисту рослин може бути практично реалізованим та дозволяє забезпечити високу ймовірність правильного розпізнавання рослин і, як наслідок, збільшити ефективність захисту корисних рослин від бур'янів. У порівнянні з прототипом запропонований спосіб відрізняється тим, що кожну із рослин, яка розпізнається, опромінюють електромагнітними сигналами з одного боку, а віддзеркалені від неї сигнали приймають з іншого боку. Тому запропонований спосіб захисту просапних культур відповідає критерію новизна". Спосіб, що пропонується, забезпечує більш високу якість розпізнавання рослин і, як наслідок, може забезпечити повну автоматизацію прополки пропашних культур як у міжряддях, так і в захисній зоні рядків за один прохід культиватора з одночасним зниженням витрат на обробку корисних рослин. При цьому за рахунок більш повного знищення бур'янів у оптимальні агротехнічні строки, може бути суттєво підвищена врожайність просапних культур. Так, наприклад, по результатам досліджень [4] навіть при наявності незначної кількості бур'янів в рослинництві недобирають до 30 відсотків врожаю. Таким чином, технічне рішення, що пропонується задовольняє критерію "промислове застосування". Джерела інформації: 1. АС №971130 СРСР, МПК3 А01 В33/02, А01 В69/04. Фрезерный культиватор для обработки почвы в междурядье растений/ Климов Г.Б., Ларюхин Г.А., Пожилов Е.И.; Всесоюзный научно-исследовательский институт лесоводства и механизации лесного хозяйства.- №3262578/30-15; Заявл. 23.01.81; Опубл. 07.11.82. Бюл. №41 2. Пат №27425 Україна, МПК6 А01 В39/18. Спосіб прополки просапних культур і пристрій для його здійснення/ Піза О.Д., Піза Д.М., Татарчук І.М.; Запорізький державний технічний університет.-№ 94010291 ;заявл. 17.12.1992; Опубл. 15.09.2000. Бюл. №4. 3. Теоретические основы радиолокации. Под ред. Ширмана Я.Д. М.: Сов.радио, 1970. -559с. 4. Серебряков И.И. и др. Индустриальные методы возделывания пропашных. Харьков. Изд-во ‘’Прапор’’, 1984.
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for weeding tilled crops
Автори англійськоюPiza Dmytro Makarovych, Morschavka Serhii Volodymyrovych
Назва патенту російськоюСпособ прополки пропашных культур
Автори російськоюПиза Дмитрий Макарович, Морщавка Сергей Владимирович
МПК / Мітки
МПК: A01B 39/00
Мітки: спосіб, культур, просапних, прополки
Код посилання
<a href="https://ua.patents.su/3-33759-sposib-propolki-prosapnikh-kultur.html" target="_blank" rel="follow" title="База патентів України">Спосіб прополки просапних культур</a>
Спосіб прополки просапних культур і пристрій для його здійснення
Номер патенту: 27425
Опубліковано: 15.09.2000
Автори: Піза Дмитро Макарович, Піза Олександр Дмитрович, Татарчук Ігор Миколайович
МПК: A01B 39/00
Мітки: просапних, здійснення, прополки, спосіб, культур, пристрій
Формула / Реферат:
1. Способ прополки пропашных культур, основанный на распознавании полезных растений и уничтожении сорных, отличающийся тем, что в направлении полезных растений излучают электромагнитные зондирующие сигналы на N частотах, осуществляют прием отраженных сигналов, выполняют их обработку путем сопоставления интенсивности отраженных сигналов с излученными, производят сравнение с эталонными значениями и управляют рабочим органом культиватора,...
Спосіб вирощування просапних культур
Номер патенту: 63696
Опубліковано: 15.01.2004
Автори: Надикто Володимир Трохимович, Санін Геннадій Анатолійович
МПК: A01B 79/02
Мітки: вирощування, спосіб, просапних, культур
Формула / Реферат:
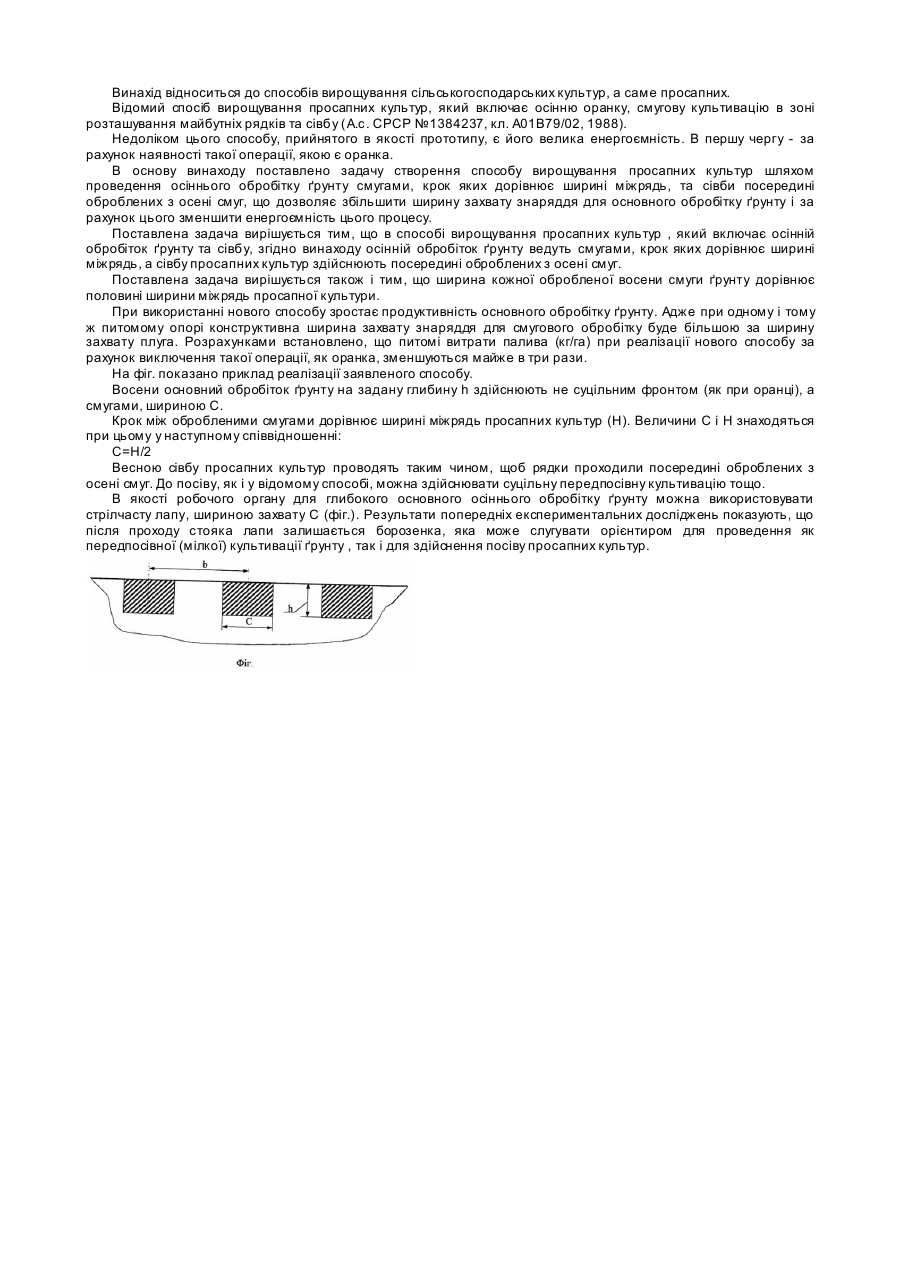
1. Спосіб вирощування просапних культур, що включає основний осінній обробіток ґрунту та сівбу, який відрізняється тим, що осінній обробіток ґрунту ведуть смугами, крок яких дорівнює ширині міжрядь, а сівбу просапних культур здійснюють посередині оброблених з осені смуг.2. Спосіб за п. 1, який відрізняється тим, що ширина кожної обробленої восени смуги ґрунту дорівнює половині ширини міжрядь просапної культури.
Спосіб вирощування просапних культур
Номер патенту: 20089
Опубліковано: 15.01.2007
Автори: Шквира Андрій Степанович, Шквира Роман Андрійович, Махмудов Ілхом Ісакович, Бойченко Сергій Федорович, Білоткач Михайло Петрович, Стражніков Валерій Олександрович
МПК: A01C 7/00
Мітки: вирощування, спосіб, культур, просапних
Формула / Реферат:
Спосіб вирощування просапних культур, який включає черезрядний посів двох сортів або гібридів, що різко відрізняються по висоті і світлочутливості, який відрізняється тим, що міжряддя виконують величиною, що дорівнює 30 см, а рослини в рядках висівають на відстані одна від одної, що дорівнює 0,5-0,7 величини міжряддя, тобто 15-21 см.
Спосіб обробітку грунту і посіву насіння просапних культур та пристрій для його здійснення
Номер патенту: 24422
Опубліковано: 17.07.1998
Автори: Сало Лариса Віталіївна, Шило Валерія Сергіївна, Іванько Іван Павлович, Дунаєвський Олег Васильович, Шмат Сергій Іванович
МПК: A01B 49/04
Мітки: здійснення, пристрій, культур, грунту, посіву, насіння, обробітку, спосіб, просапних
Формула / Реферат:
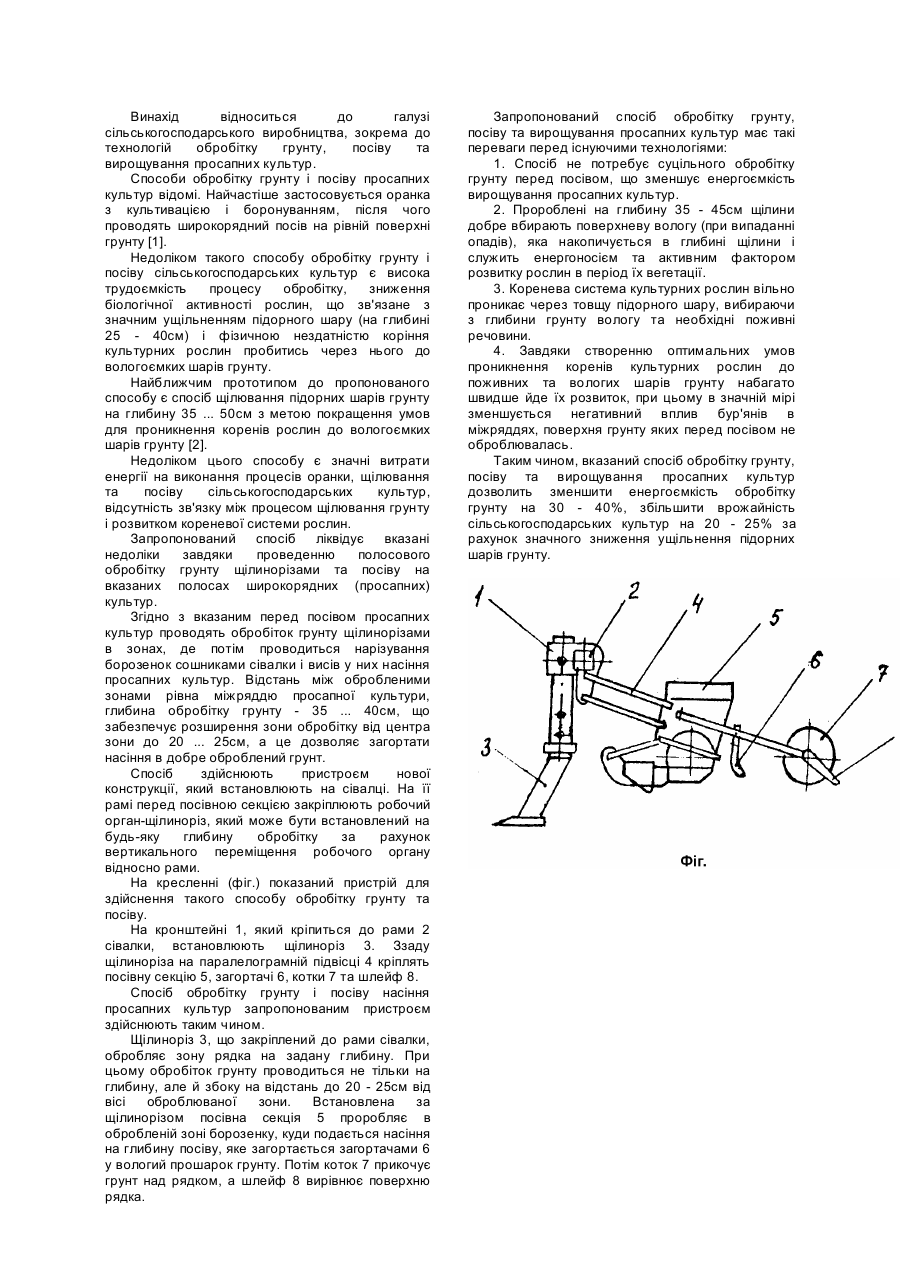
1. Спосіб обробітку грунту і посіву насіння просапних культур, який включає передпосівний обробіток грунту щілинорізами, який відрізняється тим, що посів насіння проводять у зоні завчасно пророблених на глибину 35 - 45см щілин.2. Пристрій для здійснення способу обробітку грунту і посіву за п.1, який включає робочий орган - щілиноріз, який відрізняється тим, що на рамі сівалки перед посівними секціями встановлюють щілинорізи з відстанню...
Спосіб вирощування просапних культур
Номер патенту: 25113
Опубліковано: 25.07.2007
Автор: Вітанов Олександр Дмитрович
МПК: A01G 1/00
Мітки: культур, спосіб, просапних, вирощування
Формула / Реферат:
Спосіб вирощування просапних культур, що включає формування на площі рівновеликих, кратних базовій колії трактора, залужених та незалужених смуг, вирощування у незалужених смугах просапних культур.
Попередній патент: Пристрій для завантаження сипких матеріалів в клапанні мішки
Наступний патент: Спосіб виготовлення виробів з пінобетону
Випадковий патент: Спосіб визначення показника заломлення середовища і пристрій для його здійснення