Спосіб прополки просапних культур і пристрій для його здійснення
Номер патенту: 27425
Опубліковано: 15.09.2000
Автори: Піза Дмитро Макарович, Піза Олександр Дмитрович, Татарчук Ігор Миколайович
Формула / Реферат
1. Способ прополки пропашных культур, основанный на распознавании полезных растений и уничтожении сорных, отличающийся тем, что в направлении полезных растений излучают электромагнитные зондирующие сигналы на N частотах, осуществляют прием отраженных сигналов, выполняют их обработку путем сопоставления интенсивности отраженных сигналов с излученными, производят сравнение с эталонными значениями и управляют рабочим органом культиватора, причем при отражении зондирующих сигналов от полезных растений, подвижные управляемые рабочие органы культиватора выводят из зоны рядков в междурядья, а в противном случае их вводят в зоны рядков для уничтожения сорных растений.
2. Устройство для прополки пропашных культур, содержащее раму на опорных колесах с закрепленными на ней М подвижными управляемыми рабочими органами, отличающееся тем, что в него введены М неподвижных рабочих органов и М блоков распознавания растений, каждый из которых через исполнительный механизм соединен с подвижным управляемым рабочим органом, причем каждый блок распознавания растений содержит синхронизатор, N модуляторов, соединенных с N источниками электромагнитного излучения, два приемных тракта, соединенные с аналого-цифровыми преобразователями, а также последовательно соединенные делитель и схему сравнения, ко второму входу которой подключена схема запоминания, причем каждый из приемных трактов содержит N фотоприемников и N интегрирующих усилителей, соединенных последовательно и подключенных к N входовому аналоговому коммутатору, при этом выходы первого и второго аналого-цифровых преобразователей соединены соответственно с первым и вторым входом делителя, а выход схемы сравнения является выходом блока распознавания.
Текст
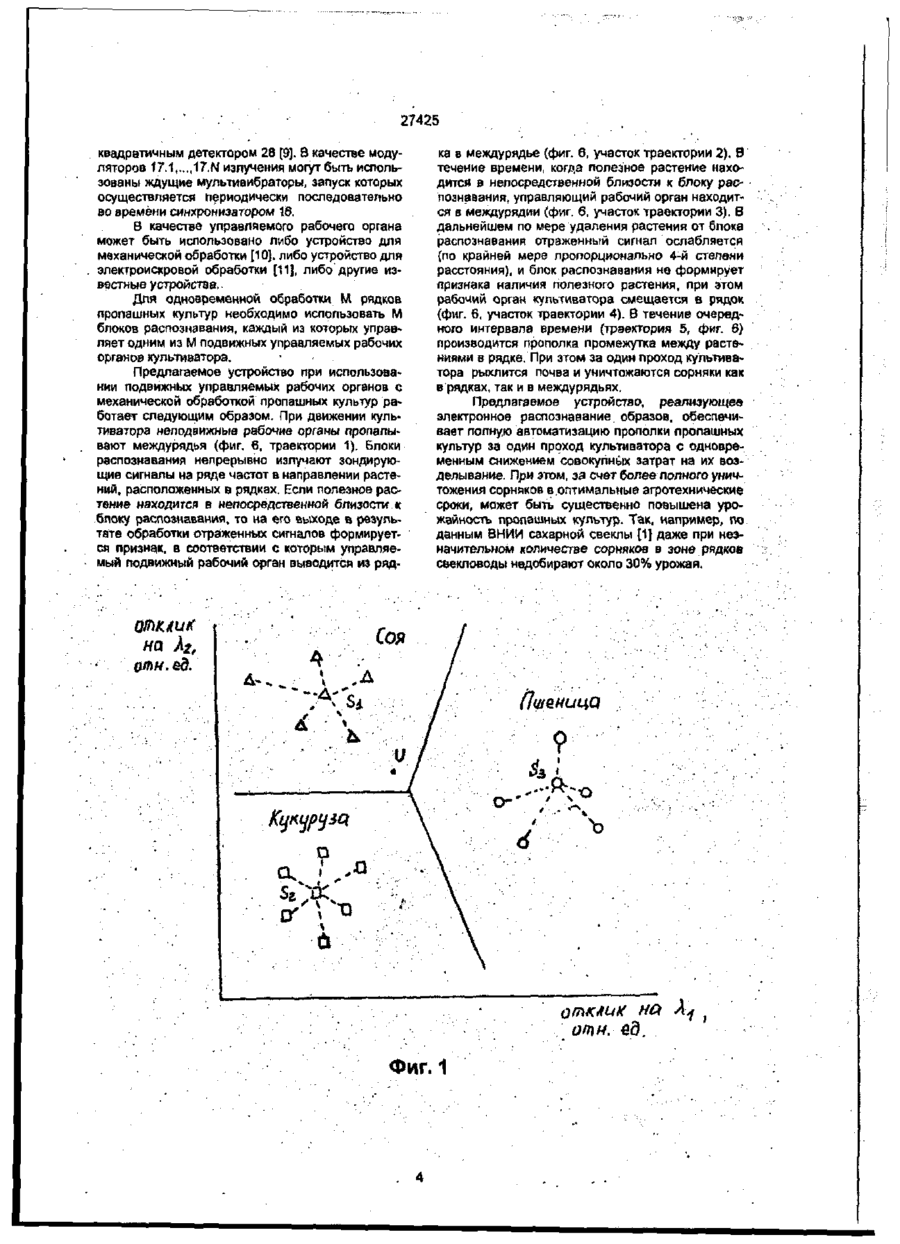
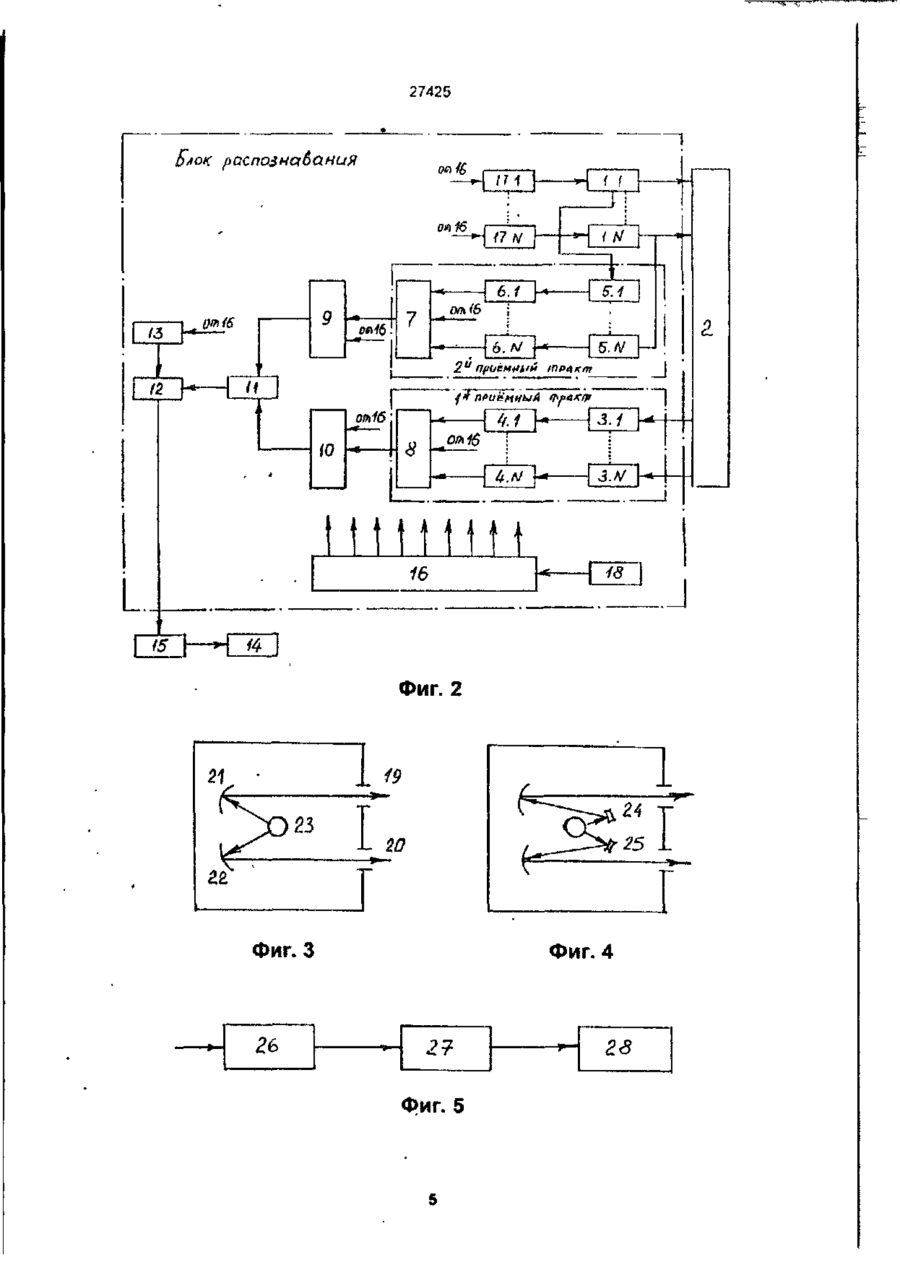
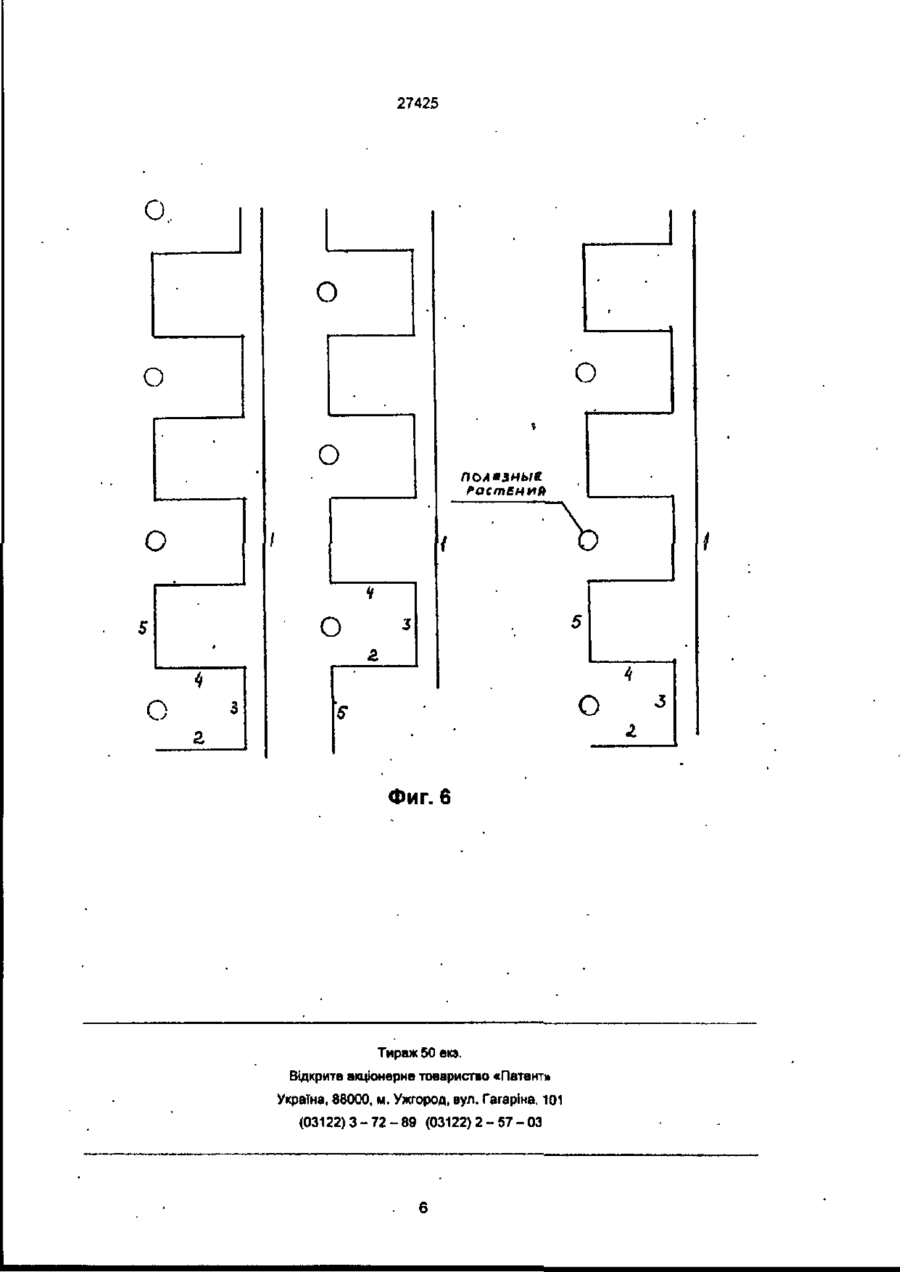
1. Способ прополки пропашных культур, основанный на распознавании полезных растений и уничтожении сорных, отличающийся тем, что в направлении полезных растений излучают электромагнитные зондирующие сигналы на N частотах, осуществляют прием отраженных сигналов, выполняют их обработку путем сопоставления интенсивности отраженных сигналов с излученными, производят сравнение с-эталонными значениямии управляют рабочим органом культиватора, при чем при отражении зондирующих сигналов от полезных растений, подвижные управляемые рабочие органы культиватора выводят из зоны рядков в междурядья, а в противном случае*их вводят в зоны рядков для уничтожения сорных растений. 2. Устройство для прополки пропашных культур, содержащее раму на опорных колесах с закрепленными на ней М подвижными управляемыми рабочими органами, отличающееся тем, что в него введены N неподвижных рабочих органов и М блоков распознавания растений, каждый из которых через исполнительный механизм соединен с подвижным управляемым рабочим органом, причем каждый блок распознавания растений содержит синхронизатор, N модуляторов, соединенных с N источниками электромагнитного излучения, два приемных тракта, соединенные с аналогоцифровыми преобразователями, а также последовательно соединенные делитель и схему сравнения, ко второму входу которой подключена схема запоминания, причем каждый из приемных трактов содержит N фотоприемников и N интегрирующих усилителей, соединенных последовательно и подключенных к N-входовому аналоговому коммутатору, при этом выходы первого и второго аналого-цифровых преобразователей соединены соответственно с первым и вторым входами делителя, а выход схемы сравнения является выходом блока распознавания. Изобретение относится к области сельскохозяйственного машиностроения и предназначено для автоматизированной прополки сорных растений при прополке пропашных культур. Известен способ прополки пропашных культур, при котором сорняки в междурядьях удаляют с помощью культиваторов [1, 2]. а в рядке - путем ручной прополки. Недостатком данной технологии является невозможность механизированного удаления мешающих растений из зоны рядка, что и определяет ее высокую трудоемкость и низкую производительность. Известен способ удаления сорных растений со всей площади посева путем довсходового рыхления почвы [1]'. Данная технология основана на использовании сплошного перекрестного боронования, которое производится за 3...4 дня до появления всходов. Недостатком этого способа прсполки явпяется повреждение проростков и смещение их с оси рядка, а также невозможность повторного использования боронования после появления всходов. Известен также квадратно-гнездовой способ прополки пропашных культур [3]. Данный способ включает операцию прополки междурядий посевов в одном направлении с последующей операцией прополки во взаимно перпендикулярном направлении. Практика использования известного способа показала, что количество сорных растений при такой прополке пропашных культур значительно уменьшается, что позволяет получить существенное повышение урожайности гюпеэных растений [1] Способ может быть реализован только при использовании спе СМ О 27425 циапьной технологии высева семян, связанной с применением мерной проволоки, предварительным выравниванием и другими подготовительными операциями. Недостатком известного способа является высокая трудоемкость как высева семян, так и обработки растений Последнее определяется необходимостью проходов культиватора в двух взаимно перпендикулярных направлениях Наиболее близким по технической сущности устройством яеляется культиватор [4], содержащий раму на опорных колесах с закрепленным на ней рабочим органом в виде фрезерного барабана с возможностью перемещения в направляющих под действием рулевого управления Вращательное движение на фрезерный барабан передается от вала отбора мощности трактора через карданный вал, редуктор, промежуточный вал и цепную передачу. В культиваторе предусмотрена возможность использования его рабочего органа для обработки промежутков между растениями в рядке. Это достигается выдвижением вала с фрезерным барабаном, установленного Р направляющих, под воздействием рулевого управления человека. Таким образом, оператор определяет необходимость обработки почвы в рядке и приводит в действие исполнительный орган культиватора, осуществляя при этом своими зрительными органами функции распознавания мешающих (сорных) растений на фоне полезных. Наиболее близкий по технической сущности способ, основанный на распознавании мешающих (сорных) растений на фоне полезных, реализован также в известном культиваторе [4]. Очевидными недостатками такого распознавания и обработки агрокультур в рядках являются высокая трудоемкость, а также повышенные потери урожая за счет несвоевременного распознавания и срабатывания рабочего органа (механизма) культиватора, особенно при одновременной прополке большого количества рядков. Использование труда оператора в экстенсивном направлении (увеличение их численности) нецелесообразно, так как неизбежно ведет к необоснованному увеличению материальных затрат, не сникая трудоемкости возделывания пропашных культур. В соответствии с существующим уровнем •техники в области прополки пропашных культур с учетом их большой площади высева (сотни млн. га) возникает настоятельная необходимость разработки технического решения, обеспечивающего полную автоматизацию прополки при существенном снижении затрат путем использования многоспектрального анализа отраженных от растительной массы электромагнитных колебаний. Поставленная задача достигается тем, что в предложенном способе в направлении полезных растений излучают электромагнитные (ЭМ) зондирующие сигналы на N частотах, осуществляют прием отраженных сигналов, выполняют их обработку, например, путем сопоставления интенсивности отраженных сигналов с излученными и на основании анализа результатов сравнения последних с эталонными значениями распознают образ полезного растений на фоне мешающего (сорного). Результаты распознавания используют для управления подвижным рабочим органом культиватора. Причем подвижным рабочим органом уп равляют следующим образом При отражении зондирующих сигналов от полезных растений управляемый рабочий орган культиватора выводят из зоны рядка а междурядье В противном случае управляемый подвижный рабочий орган культиватора вводят в зону рядка для удаления сорных растений и рыхления почвы. В предлагаемом устройстве поставленная задача достигается тем, что в известное устройство, содержащее раму на опорных колесах с закрепленными на ней подвижными управляемыми рабочими органами, дополнительно введены неподвижные рабочие органы и блоки распознавания растений, каждый из которых подключен к исполнительному механизму, приводящему в действие подвижный управляемый рабочий орган. Итак, по сравнению с прототипом предложенное техническое решение обладает следующими отличительными признаками: - по способу: в направлении полезных растений излучают электромагнитные зондирующие сигналы на ряде частот; осуществляют прием отраженных сигналов; производят обработку отраженных сигналов; сравнивают результаты обработки с эталонными значениями; по результатам сравнения управляют рабочим органом культиватора; - по устройству; М неподвижных рабочих органов; М блоков распознавания растений, каждый из которых через исполнительный механизм подключен к подвижному управляемому рабочему органу. Предлагаемое устройство, содержащее М неподвижных рабочих органов и М блоков распознавания полезных растений, управляющих М подвижными рабочими органами, обеспечивает полную автоматизацию прополки пропашных культур за один проход культиватора. Это позволит существенно снизить совокупные затраты на возделывание пропашных культур и повысить их урожайность Более подробно сущность заявляемого способа может быть пояснена чертежами, а также путем описания устройства для реализации способа. В соответствии с этим на чертежах представлены: на фиг. 1 результаты регистрации электромагнитных откликов, на фиг. 2 структурная схема радиоэлектронной части предлагаемого устройства, на фиг. 3 и 4 возможные конструкции источников излучения, на фиг. 5 структурная схема фотоприемника, на фиг. 6 траектории движения рабочих органов устройства. Распознавание полезных растений базируется на регистрации электромагнитных откликов обрабатываемой растительности, например, на двух различных частотах спектра (фиг. 1). Решение о принадлежности исследуемого образа к тому или иному классу растений в наиболее простом случае принимается по минимальному расстоянию от точки, характеризующей распознаваемый отклик образа (точка и) до условно среднего отклика образов исследуемых классов растений S (на фиг. 1 j = 1, 2, 3) в соответствующей системе координат [5]. Принципиальная возможность рас 27425 познавания растений по их отражательной способности обоснована в ряде научных работ, в частности [Ъ, 6, 7]. Поставленная задача решается посредством установки на культиваторе, содержащем раму на опорных колесах с закрепленным на ней подвижным управляемым рабочим органом, неподвижного рабочего органа и блока распознавания, соединенного через исполнительный механизм с подвижным управляемым рабочим органом. Устройство содержит раму на опорных колесах с закрепленными на ней подвижным управляемым рабочим органом, неподвижным рабочим органом и блоком распознавания, соединенным через исполнительный механизм с подвижным управляемым рабочим органом. Блок распознавания содержит N источников 1.1 1.N (см. фиг. 2) излучающих ЭМ колебания в направлении объекта распознавания 2. В состав устройства входят первый и второй приемные тракты, каждый из которых содержит N фотоприемников и N интегральных усилителей, соответственно 3.1,....3.N и 4.1 4.N в первом приемном тракте и 5.1,...,5.N и 6.1.....6.N во втором приемном тракте. Выходы интегрирующих усилителей первого и второго приемных трактов подключены к N-входовь'ім аналоговым коммутаторам, соответственно 7 и 8. Выходы аналоговых коммутаторов 7 и 8 одновременно являются выходами первого и второго приемных трактов и подключены к аналого-цифровым преобразователям 9 и 10 соответственно, которые соединены со входами схемы деления 11. Схема деления 11 подключена к первому входу блока сравнения 12, второй вход которого соединен с выходом блока запоминания 13, причем выход блока сравнения 12 является одновременно и выходом блока распознавания. Устройство содержит также подвижный управляемый рабочий орган 14 и исполнительный механизм 15. Кроме того в состав блока распознавания входит синхронизатор 16, подключенный к модуляторам 17.1 17.N, аналоговым коммутаторам 7 и 8, аналого-цифровым преобразователям 9 и 10, а также к блоку запоминания 13, при этом вход синхронизатора 16 соединен с выходом кварцевого генератора 18. Устройство работает следующим образом. N источников излучения 1.1 1.N генерируют и излучают в направлении растений (объект 2 на фиг. 2) электромагнитные колебания на N частотах. Количество частот определяется необходимой степенью надежности распознавания или классификации объекта 2. Отраженные от зондируемого объекта колебания с частотами F, i=1 N, воспринимаются соответствующими фотоприемниками 3.1 3.N, в которых они преобразуются в электрические сигналы, затем усредняются по времени и усиливаются соответствующими интегрирующими усилителями 4.1 4.N, например, построенными на базе операционных усилителей (может быть использована интегральная микросхема (ИМС) К140 УД11) Таким образом, на выходах усилителей 4.1,. .,4.N первого приемного тракта образуются электрические сигналы, пропорциональные мощности отраженных ЭМ колебаний ряда частот F, i=1,....N. Одновременно с этим происходит процесс детектирования излучения, испускаемого источниками 1.1,....1.N фотоприемниками 5 1 5 N соответственно, устройство и принцип действия которых, как и интегрирующих усилителей 6.1.....6.М аналогичны фотоприемникам 3.1 3 N и усилитепям 4.1.....4N ' соответственно. Таким образом, на выходе ус литепей 6 1.....6.N второго приемного тракта сформируется "электрический сигнал, пропорциональный мощности, излучаемой в направлении зондируемого обьекта. Аналоговые коммутаторы 7 и 8, тактируемые синхронизатором 16 последовательно подключают каждый из N каналов, обоих трактов приемника к соответствующим • аналого-цифровым преобразователям (АЦП) 9, 10, в которых низкочастотные сигналы, нэсущие информацию о мощности излученного (на выходе АЦП Э) и отраженного (на выходе АЦП 10) колебаний на ряде частот F, i=1,...,N преобразуются в цифровую форму. Она представляете* наиболее удобной для вычисления коэффициента отражения объекта по мощности -Котр., как отношения отраженной мощности от объекта 2 к излученной в его сторону. Этот процесс происходит в блоке 11, который может быть выполненным, например, на базе ИМС 1802 ВР1, работающей в режиме деления. Результаты вычислений обрабатывают в блоке сравнения 12 с эталонными контрольными выборками образов- растений. Контрольные выборки, представляющие собой набор эталонных среднестатистических значений Котр. образов зондируемых растительных культур хранятся в блоке 13. Результаты сравнения используют для формирования сигнала управления подвижным рабочим органом культиватора 14 через исполнительный механизм 15. Необходимость временного и спектрального сопряжения функционирования N каналов и приема предполагают использование синхронизатора 16, обеспечивающего последовательный запуск N модуляторов 17.1 17.N источников излучения 1.1 1 N соответственно, а также последовательное подключение каналов обоих трактов приема через аналоговые коммутаторы 7, 8 к АЦП 9.10 и последующие операции с цифровыми кодами образов, производимые в блоках 11 и 13. Частота колебаний синхронизатора 16 может быть стабилизирована кварцевым опорным генератором 18 (фиг. 2). Источник излучения 1.1 1.N целесообразно построить по двухлучевой схеме по принципу, используемому в инфракрасном спектрофотометре ИСК-14 [8]. Подобное построение, показанное на фиг. 3, позволяет добиться на двух выходах 19 и 20 излучения одинаковой мощности, сфокусированной сферическими зеркалами 2 1 , 22 (фиг. 3). Причем, в зависимости от конструкции-излучателя 23. оптическая схема источника может быть построена и с использованием гиперболических зеркал 24, 25 (фиг. 4) в дополнении к сферическим. Фотоприемники 3.1 3.N и 5.1, ...5.N с учетом спектральных свойств каналов могут быть построены по следующей схеме (фит, 5): линза 26 фокусирует на входном окне фоточувствительного элемента 27 электромагнитное оптическое излучение определенной частоты, которое преобразуется последним в электрический сигнал. Последующая демодуляция осуществляется, например, 27425 квадратичным детектором 23 [9]. 8 качестве модуляторов 17.1.....17.N излучения могут быть использованы ждущие мультивибраторы, запуск которых осуществляется периодически последовательно во времени синхронизатором 1.6. В качестве управляемого рабочего органа может быть использовано либо устройство для механической обработки [10J. либо устройство для электроискровой обработки [11], либо'другие известные устройства.. Для одновременной обработки М рядков пропашных культур необходимо испопьзовать М блоков распознавания, каждый из которых управляет одним из М подвижных управляемых рабочих органов культиватора. Предлагаемое устройство при использовании подвижных управляемых рабочих органов с механической обработкой пропашных культур работает следующим образом. При движении культиватора неподвижные рабочие органы пропалывают междурядья (фиг. 6, траектории 1). Блоки распознавания непрерывно излучают зондирующие сигналы на ряде частот в направлении растений, расположенных в рядках. Если полезное растение находится а непосредственной близости к блоку распознавания, то на его выходе в результате обработки отраженных сигналов формируется признак, в соответствии с которым управляемый подвижный рабочий орган выводится из ряд на • • ' ка в междурядье (фиг. б, участок траектории 2). В течение времени, когда полезное растение находится в непосредственной близости к блоку распознавания, управляющий рабочий орган находится а междурядий (фиг. 6, участок траектории 3). В дальнейшем по мере удаления растения от блока распознавания отраженный сигнал ослабляется (по крайней мере пропорционально 4-й степени расстояния), и блок распознавания не формирует признака наличия полезного растения, при этом рабочий орган культиватора смещается в рядок (фиг. 6, участок траектории 4). В течение очередного интервала времени (траектория 5, фиг. 6) производится прополка промежутка между растениями в рядке. При этом за один проход культиватора рыхлится почва и уничтожаются сорняки как в рядках, так и в междурядьях. Предлагаемое устройство, реализующее электронное распознавание, образов, обеспечивает полную автоматизацию прополки пропашных культур за один проход культиватора с одновременным снижением совокупных затрат на их возделывание. При этом, за счет более попного уничтожения сорняков в оптимальные афотехнические сроки, может быть существенно повышена урожайность пропашных культур. Так, например, по данным ВНИИ сахарной свеклы 11] даже при незначительном количестве сорняков в зоне рядков свекловоды недобирают около 30% урожая. Соя "• , еЭ. 1 / >. ^ • UWQHUHQ / ' •/ "4 ?•"'•' Q Si cr Ж 1 отклих HP Xj ап\н. ед. Фиг. 1 t 27425 Елок распознябания /м от 16 ЯN JT *- / N 5.1 ол 16 0П\
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod to weed tilled crops and device for carrying out thereof
Автори англійськоюPiza Oleksandr Dmytrovych, Piza Dmytro Makarovych, Tatarchuk Ihor Mykolaiovych
Назва патенту російськоюСпособ прополки пропашных культур и устройство для его осуществления
Автори російськоюПиза Александр Дмитриевич, Пиза Дмитрий Макарович, Татарчук Игорь Николаевич
МПК / Мітки
МПК: A01B 39/00
Мітки: просапних, культур, пристрій, спосіб, здійснення, прополки
Код посилання
<a href="https://ua.patents.su/6-27425-sposib-propolki-prosapnikh-kultur-i-pristrijj-dlya-jjogo-zdijjsnennya.html" target="_blank" rel="follow" title="База патентів України">Спосіб прополки просапних культур і пристрій для його здійснення</a>
Способ боротьби з бур’янами в посівах просапних культур та пристрій для його здійснення
Номер патенту: 5202
Опубліковано: 28.12.1994
Автори: Квашнін Олексій Харитонович, Бондарева Ольга Браунівна, Ремезов Лев Володимирович
МПК: A01B 79/02
Мітки: бур'янами, здійснення, культур, просапних, пристрій, способ, боротьби, посівах
Формула / Реферат:
(57) 1. Способ борьбы с сорными растениями в посевах пропашных культур, заключающийся в подрезании сорняков и рыхлении почвы в междурядьях, а также присыпании сорняков в защитной зоне рядков слоем почвы из междурядий, отличающийся тем, что перед присыпанием защитной зоны рядка ее рыхлят и осуществляют с ее поверхности пневматический сбор слоя почвы с сорными растениями и их семенами толщиной не менее 1 см.2. Способ по п. 1,...
Спосіб обробітку грунту і посіву насіння просапних культур та пристрій для його здійснення
Номер патенту: 24422
Опубліковано: 17.07.1998
Автори: Сало Лариса Віталіївна, Шмат Сергій Іванович, Дунаєвський Олег Васильович, Іванько Іван Павлович, Шило Валерія Сергіївна
МПК: A01B 49/04
Мітки: здійснення, спосіб, обробітку, посіву, культур, просапних, грунту, насіння, пристрій
Формула / Реферат:
1. Спосіб обробітку грунту і посіву насіння просапних культур, який включає передпосівний обробіток грунту щілинорізами, який відрізняється тим, що посів насіння проводять у зоні завчасно пророблених на глибину 35 - 45см щілин.2. Пристрій для здійснення способу обробітку грунту і посіву за п.1, який включає робочий орган - щілиноріз, який відрізняється тим, що на рамі сівалки перед посівними секціями встановлюють щілинорізи з відстанню...
Спосіб посіву насіння просапних культур і пристрій для його здійснення
Номер патенту: 23165
Опубліковано: 19.05.1998
Автори: Шило Валерія Сергіївна, Іванько Іван Павлович, Шмат Сергій Іванович, Радзієвський Леонід Леонідович
МПК: A01C 7/00
Мітки: пристрій, насіння, спосіб, просапних, здійснення, культур, посіву
Формула / Реферат:
Спосіб посіву насіння просапних культур, який включає поверхневий обробіток грунту і посів насіння просапними сівалками, який відрізняється тим, що одночасно з посівом насіння проводять поверхневий обробіток зони рядка з відгортанням лапами-відвальниками поверхневого прошарку грунту глибиною 4-8 см І шириною 10-16 см,2, Спосіб посіву по п. 1, який відрізняється тим, що для боротьби з бур'янами без застосування гербіцидів одночасно з...
Спосіб глибинної технології вирощування просапних культур та пристрій для його здійснення
Номер патенту: 20706
Опубліковано: 07.10.1997
Автори: Радзієвський Леонід Леонідович, Іванько Іван Павлович, Шмат Сергій Іванович, Рогатинський Василь Іванович, Гершкул Іван Павлович
МПК: A01C 7/00
Мітки: вирощування, культур, здійснення, просапних, глибинної, пристрій, спосіб, технології
Формула / Реферат:
1. Спосіб глибинної технології вирощування просапних культур, що включає прорізування щілини та створення борозни, по якій проходить сошник, який відрізняється тим, що борозна утворюється перед проходом посівної секції і глибина її дорівнює глибині сухого прошарку грунту.2. Спосіб по п. 1, який відрізняється тим, що при стерньовому посіві борозноутворговач встановлюють на глибину ходу сошника посівної секції.3. Пристрій для...
Знаряддя для міжрядної обробки просапних культур
Номер патенту: 3994
Опубліковано: 27.12.1994
Автори: Бондарева Ольга Браунівна, Пархомюк Костянтин Михайлович, Квашнін Олексій Харитонович
МПК: A01B 39/00
Мітки: просапних, культур, знаряддя, обробки, міжрядної
Формула / Реферат:
1. Орудие для междурядной обработки пропашных культур, содержащее установленные на раме секции рабочих органов, каждая из которых имеет продольный грядиль с последовательно смонтированными на нем стрельчатой лапой, парой игольчатых дисков и установленным на вертикальной оси ротационным рабочим органом, при этом вертикальная ось ротационного рабочего органа каждой из крайних секций смещена в поперечном направлении от продольной оси грядиля,...
Попередній патент: Спосіб виявлення пошкодження в мережі змінного струму
Наступний патент: Пристрій компенсації транспортного запізнення натягу полотна
Випадковий патент: Спосіб підвищення ресурсу важкозавантажених прогінних кранових балок