Перистальтичний мікронасос
Номер патенту: 3677
Опубліковано: 27.12.1994
Автори: Шишов Юрій Георгійович, Флоризяк Володимир Олександрович, Берсеньов Валерій Якович, Солодовник Микола Леонидович, Абдулін Салєх Мустафієвич, Жукарєв Володимир Олександрович, Голов'яшин Юрій Володимирович, Петренко Сергій Федорович
Формула / Реферат
Перистальтический микронасос, содержащий роликовую головку, соединенную с приводом, подключенным к блоку управления, и источник питания, отличающийся тем, что привод выполнен пьезоэлектрическим в виде вала с ротором, связанным через толкатель с кольцевым пьезоэлементом, блок управления выполнен в виде генератора высокочастотных импульсов возбуждения пьезоэлемента, соединенного с управляемым ключом, вход которого соединен с выходом формирователя длительности пачки импульсов возбуждения, вход которого связан с формирователем частоты следования пачек импульсов, источник питания подключен к управляемому ключу блока управления, а соединение роликовой головки с приводом выполнено неразъемным.
Текст
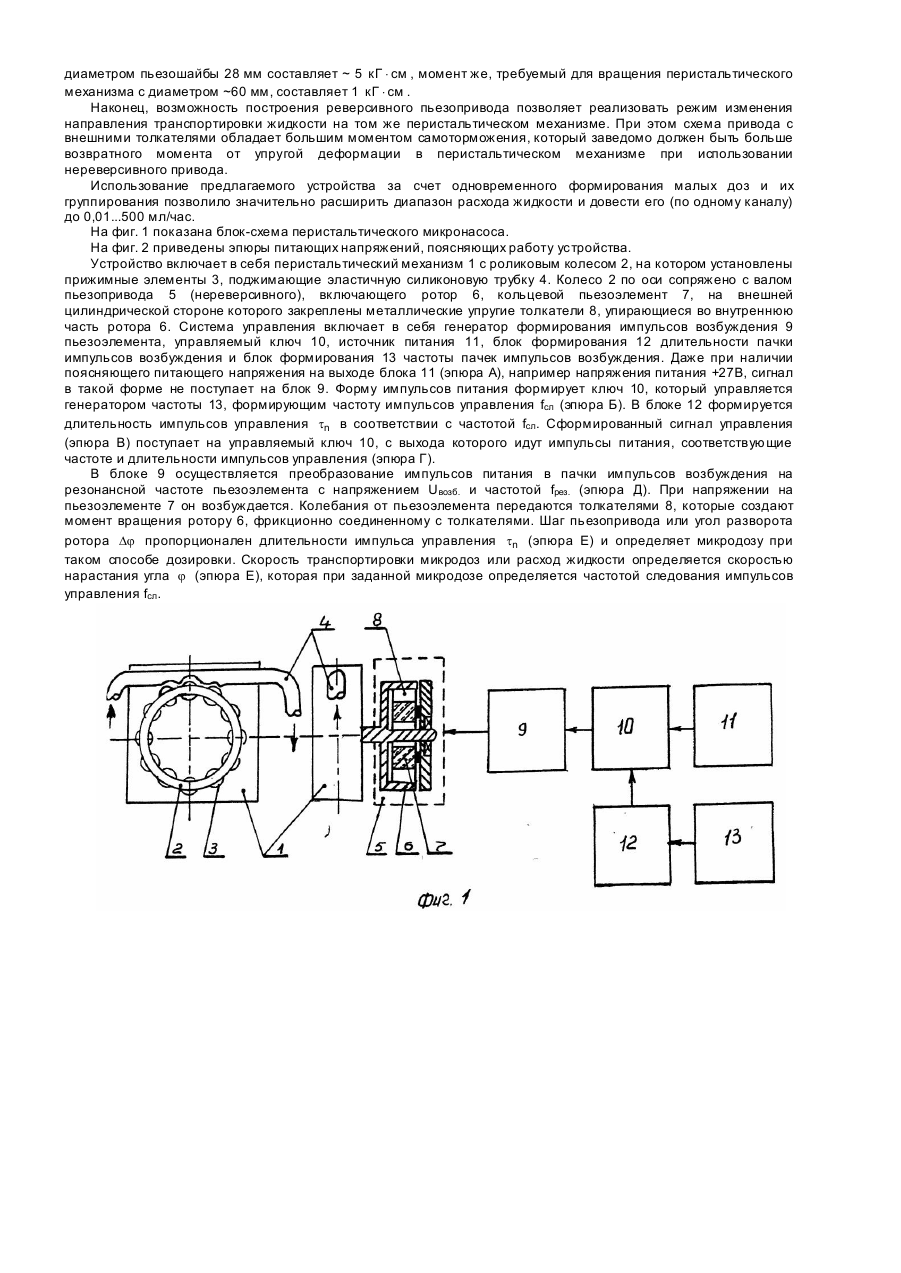
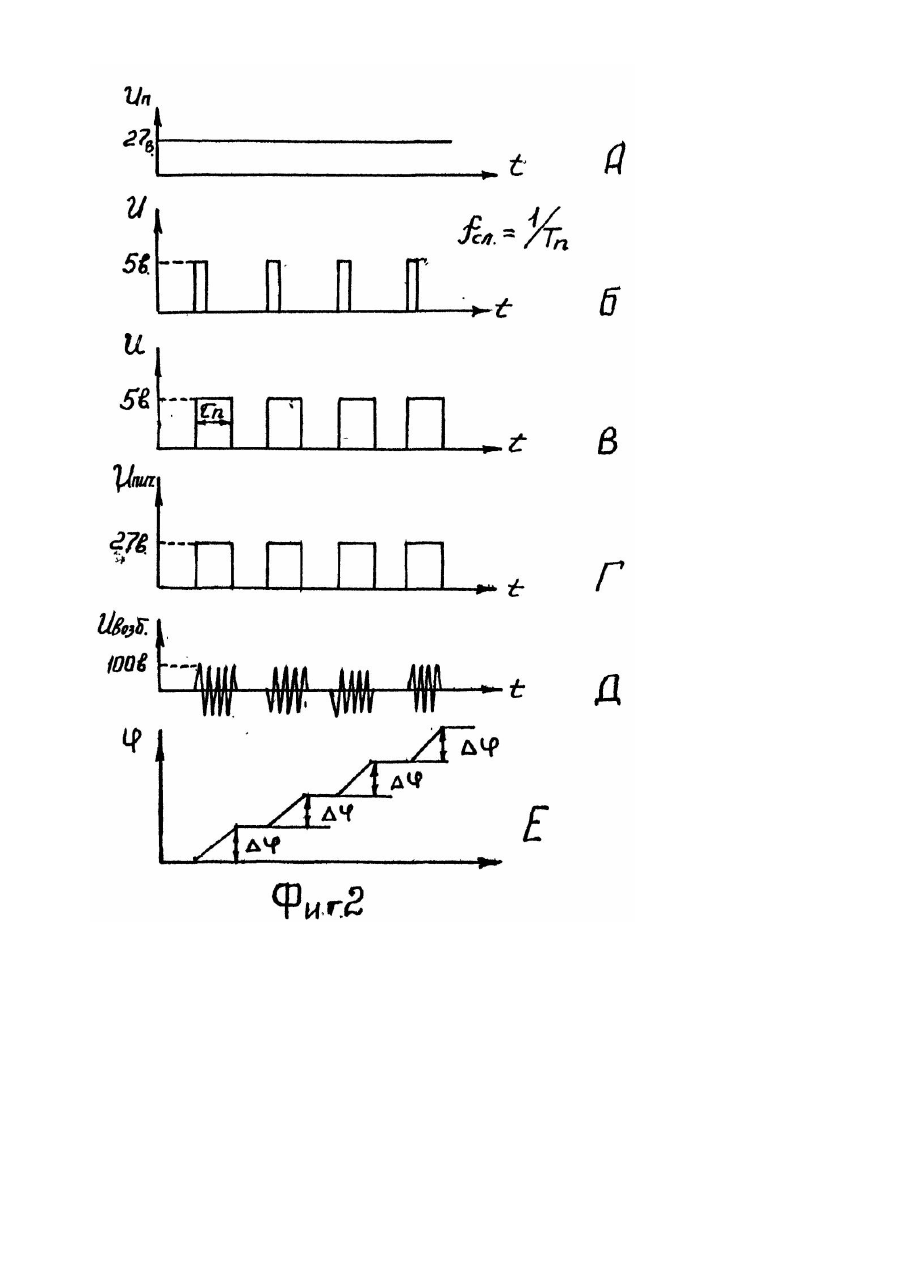
Изобретение относится к приборостроению и может быть использовано при дозировании малых объемов в химической, медицинской и други х отраслях промышленности. Известен принцип перистальтического дозирования [1] жидкости деформацией и восстановлением цилиндрической эластичной камеры во входном, среднем и выходном сечениях, причем начало цикла последовательной деформации и восстановления во входном и среднем сечениях осуществляют одновременно и в противофазе с началом цикла последовательного восстановления и деформации в выходном сечении, а градиент импульса деформации среднего сечения выбирают меньше градиента импульса деформации входного сечения, но больше градиента импульса восстановления выходного сечения, деформацию среднего сечения направляют под углом a к продольной оси камеры в пределе 75° < a < 88°. В данном устройстве путем специально сформированной разницы градиентов деформаций входного-выходного сечения формируется величина микродозы и повышается точность формирования этой микродозы. Однако при этом следует, что величина самой микродозы не регулируется, а изменение расхода жидкости определяется частотой формирования микродоз, и уже при частоте 10...20 Гц наблюдается процесс сцепления отдельных микродоз, что указывает на их значительную величину по отношению к сечению деформируемой трубки и, следовательно, сужает диапазон регулирования расхода жидкости за счет повышения нижнего предела расхода жидкости. Известен инфузионный насос [2], принятый в качестве прототипа, который содержит задатчик режима расхода жидкости, формирователь фазной последовательности, синхронный многофазный двигатель, подключенный к управляемому источнику тока и механически связанный с роликовой головкой. Насос дополнительно снабжен датчиком скорости вращения двигателя и программным блоком, содержащим задатчик режима работы, задатчик амплитуды пульсации, сумматор, два коммутатора, формирователь импульсных сигналов, устройство сравнения и кардиосинхронизатор, причем выход задатчика режима расхода жидкости подключены к первому входу сумматора и второму входу первого коммутатора, первый вход которого соединен с выходом сумматора, второй вход сумматора подключен к выходу задатчика амплитуды пульсации, выход задатчика режима работы, управляемого кардиосинхронизатором, выход которого соединен с входом формирователя фазной последовательности и вторым входом устройства сравнения, первый вход которого подключен к датчику скорости, выход формирователя фазной последовательности подключен к первому входу и через формирователь импульсных сигналов к второму входу коммутатора, управляемый вход которого соединен с выходом устройства, вы ход второго коммутатора подключен к управляемому источнику тока. Изобретение повышает точность дозирования за счет стабилизации скорости многофазного двигателя, при этом одновременное формирование малых доз и их гр уппирование не обеспечивается. Дальнейшее уменьшение микродоз в таких системах может быть достигнуто установкой понижающих редукторов, что с одной стороны, приводит к увеличению габаритов, энергоемкости, а с другой - к ограничению возможности группирования микродоз за счет уменьшения скорости их транспортировки. При создании изобретения решалась задача путем обеспечения возможности одновременного формирования малых доз и их группирования расширить диапазон расхода жидкости во времени без снижения точности дозирования. Эта задача решается за счет того, что в перистальтическом микронасосе, содержащем роликовую головку, соединенную с приводом, подключенным к блоку управления, и источник питания, согласно изобретению, привод выполнен пьезоэлектрическим в виде вала с ротором, связанным через толкатель с кольцевым пьезоэлементом, блок управления выполнен в виде генератора высокочастотных импульсов возбуждения пьезоэлемента, соединенного с управляемым ключом, вход которого соединен с выходом формирователя длительности пачки импульсов возбуждения, вход которого связан с формирователем частоты следования пачек импульсов, источник питания подключен к управляемому ключу блока управления, а соединение роликовой головки с приводом выполнено неразъемным. Технический результат достигается благодаря тому, что формирование результирующей деформации, соответствующей микродозе, осуществляется суммой высокочастотных микродеформаций. Это в свою очередь позволяет значительно понизить саму микродозу, минимальная величина которой теоретически будет определяться одной высокочастотной микродеформацией. Ввиду того, что микродеформации осуществляются с высокой частотой 20...100 кГц, это позволило сформировать пропорциональный закон расхода жидкости с широким диапазоном изменения скорости транспортировки микродоз, независимо от самой микродозы, или, что то же самое, осуществлять различное группирование микродоз, независимо от самой микродозы. Задатчиком высокочастотных микродеформаций является устройство на базе пьезоэлемента, работающее по принципу обратного пьезоэффекта - пьезопривод ударного типа вращательного движения на базе кольцевого пьезоэлемента с внешними толкателями. В сочетании с роликовой головкой величина микродеформации таким приводом пропорциональна его угловому шагу. Угловой шаг такого пьезопривода пропорционален длительности пачки резонансных высокочастотных импульсов возбуждения пьезоэлемента. Угловой шаг может меняться в зависимости от длительности пачки от минимального (соответствующего одному высокочастотному импульсу возбуждения пьезоэлемента) до ¥ (непрерывного вращения). Изменяя шаг путем изменения длительности пачки возбуждения t , тем самым можно менять величину микродозы от 0 до ¥ . Группирование микродоз или расход определяется скоростью транспортировки микродозы или, что то же самое, скоростью вращения пьезопривода. Скорость вращения может определяться как частотой следования fсл = 1/ tn пачек импульсов возбуждения, так и напряжением питания пьезопривода. Но именно режим регулирования частоты fсл следования пачек позволяет обеспечить постоянство момента на валу пьезопривода и тем самым значительно снизить нижний предел диапазона регулирования расхода жидкости во времени, т.е. практически свести его к нулю. Именно схема пьезопривода на кольцевом пьезоэлементе с внешними толкателями обладает улучшенными старт-стопными характеристиками за счет повышенного внутреннего момента самоторможения, что позволяет получать весьма малые шаги, а значит и формировать весьма малые микродозы. Так, угловой шаг на пьезоприводе с диаметром пьезошайбы 28 мм и внешними толкателями составил ~1 угл. сек. С другой стороны, именно такая схема пьезопривода обладает повышенным моментом, что позволяет на валу пьезопривода разместить несколько перистальтических механизмов. Так, момент на валу пьезопривода с диаметром пьезошайбы 28 мм составляет ~ 5 кГ × см , момент же, требуемый для вращения перистальтического механизма с диаметром ~60 мм, составляет 1 кГ × см . Наконец, возможность построения реверсивного пьезопривода позволяет реализовать режим изменения направления транспортировки жидкости на том же перистальтическом механизме. При этом схема привода с внешними толкателями обладает большим моментом самоторможения, который заведомо должен быть больше возвратного момента от упругой деформации в перистальтическом механизме при использовании нереверсивного привода. Использование предлагаемого устройства за счет одновременного формирования малых доз и их группирования позволило значительно расширить диапазон расхода жидкости и довести его (по одному каналу) до 0,01...500 мл/час. На фиг. 1 показана блок-схема перистальтического микронасоса. На фиг. 2 приведены эпюры питающих напряжений, поясняющих работу устройства. Устройство включает в себя перистальтический механизм 1 с роликовым колесом 2, на котором установлены прижимные элементы 3, поджимающие эластичную силиконовую трубку 4. Колесо 2 по оси сопряжено с валом пьезопривода 5 (нереверсивного), включающего ротор 6, кольцевой пьезоэлемент 7, на внешней цилиндрической стороне которого закреплены металлические упругие толкатели 8, упирающиеся во внутреннюю часть ротора 6. Система управления включает в себя генератор формирования импульсов возбуждения 9 пьезоэлемента, управляемый ключ 10, источник питания 11, блок формирования 12 длительности пачки импульсов возбуждения и блок формирования 13 частоты пачек импульсов возбуждения. Даже при наличии поясняющего питающего напряжения на выходе блока 11 (эпюра А), например напряжения питания +27В, сигнал в такой форме не поступает на блок 9. Форму импульсов питания формирует ключ 10, который управляется генератором частоты 13, формирующим частоту импульсов управления fсл (эпюра Б). В блоке 12 формируется длительность импульсов управления tn в соответствии с частотой fcл. Сформированный сигнал управления (эпюра В) поступает на управляемый ключ 10, с выхода которого идут импульсы питания, соответствующие частоте и длительности импульсов управления (эпюра Г). В блоке 9 осуществляется преобразование импульсов питания в пачки импульсов возбуждения на резонансной частоте пьезоэлемента с напряжением Uвозб. и частотой fpeз. (эпюра Д). При напряжении на пьезоэлементе 7 он возбуждается. Колебания от пьезоэлемента передаются толкателями 8, которые создают момент вращения ротору 6, фрикционно соединенному с толкателями. Шаг пьезопривода или угол разворота ротора Dj пропорционален длительности импульса управления tn (эпюра Е) и определяет микродозу при таком способе дозировки. Скорость транспортировки микродоз или расход жидкости определяется скоростью нарастания угла j (эпюра Е), которая при заданной микродозе определяется частотой следования импульсов управления fсл.
ДивитисяДодаткова інформація
Назва патенту англійськоюPeristaltic micro-pump
Автори англійськоюBerseniov Valerii Yakovych, Holoviashyn Yurii Volodymyrovych, Zhukarev Volodymyr Oleksandrovych, Petrenko Serhii Fedorovych, Solodovnyk Mykola Leonidovych, Floryziak Volodymyr Oleksandrovych, Shyshov Yurii Heorhiiovych, Abdulin Salekh Mustafievych
Назва патенту російськоюПеристальтический микронасос
Автори російськоюБерсенев Валерий Яковлевич, Головяшин Юрий Владимирович, Жукарев Владимир Александрович, Петренко Сергей Федорович, Солодовник Николай Леонидович, Флоризяк Владимир Александрович, Шишов Юрий Георгиевич, Абдулин Салех Мустафиевич
МПК / Мітки
МПК: G01F 13/00
Мітки: перистальтичний, мікронасос
Код посилання
<a href="https://ua.patents.su/3-3677-peristaltichnijj-mikronasos.html" target="_blank" rel="follow" title="База патентів України">Перистальтичний мікронасос</a>
Формувач імпульсів
Номер патенту: 4468
Опубліковано: 27.12.1994
Автори: Баран Петро Миколаєвич, Бугайчук Олексій Анатолієвич
МПК: H03K 5/153
Формула / Реферат:
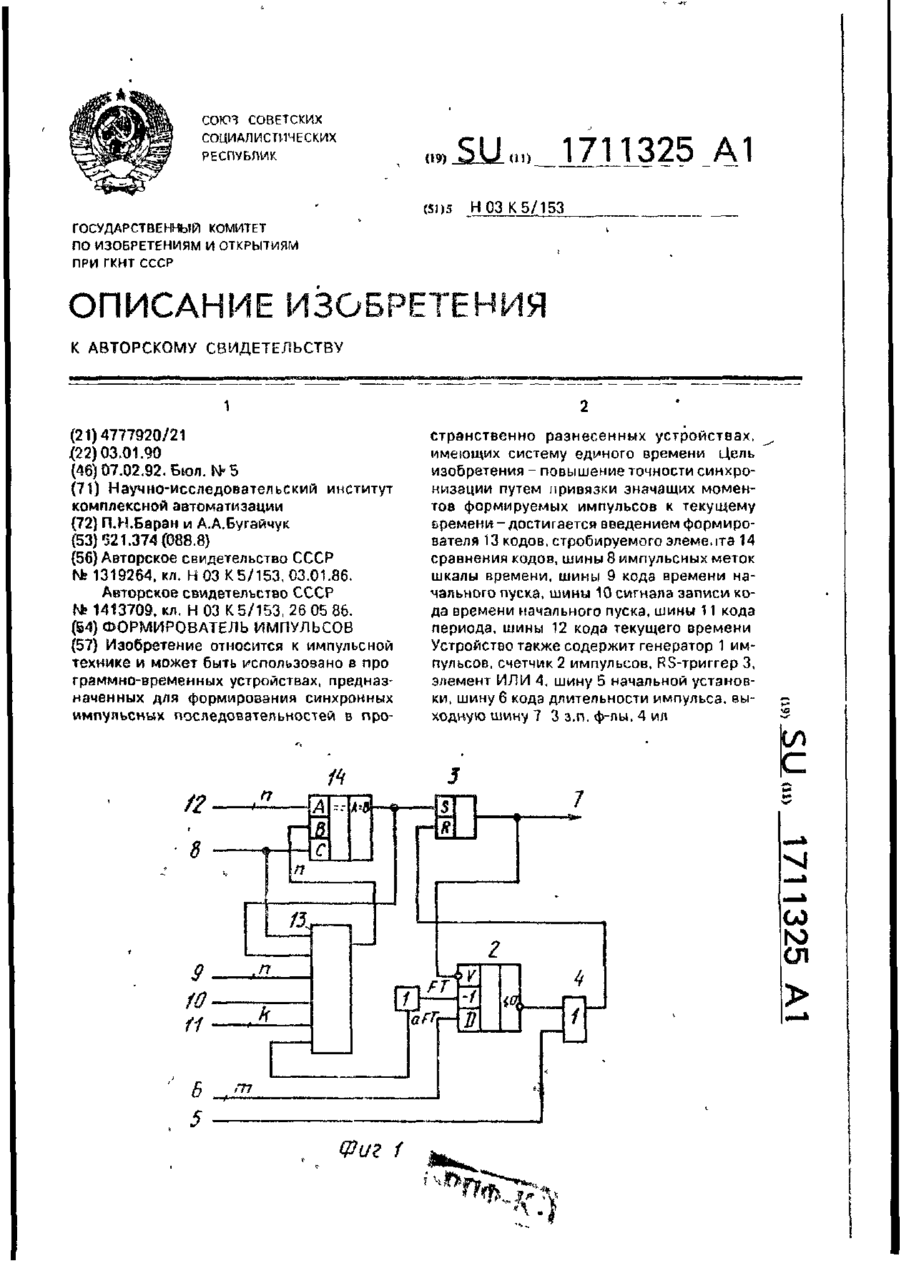
1. Формирователь импульсов, содержащий генератор импульсов, первый выход которого соединен со счетным входом счетчика импульсов, RS-триггер, элемент ИЛИ, шину начальной установки, шину кода длительности импульса, выходную шину, отличающийся тем, что, с целью повышения точности синхронизации путем привязки значащих моментов формируемых импульсов к текущему времени, в него введены шина импульсных меток шкалы времени, шина кода времени...
Пристрій для захисту від перевищення допустимої частоти обертання електродвигуна постійного струму
Номер патенту: 2794
Опубліковано: 26.12.1994
Автори: Бардамід Василь Іванович, Монаєв Віктор Іванович
МПК: H02H 7/093
Мітки: електродвигуна, постійного, частоти, допустимої, струму, пристрій, перевищення, обертання, захисту
Формула / Реферат:
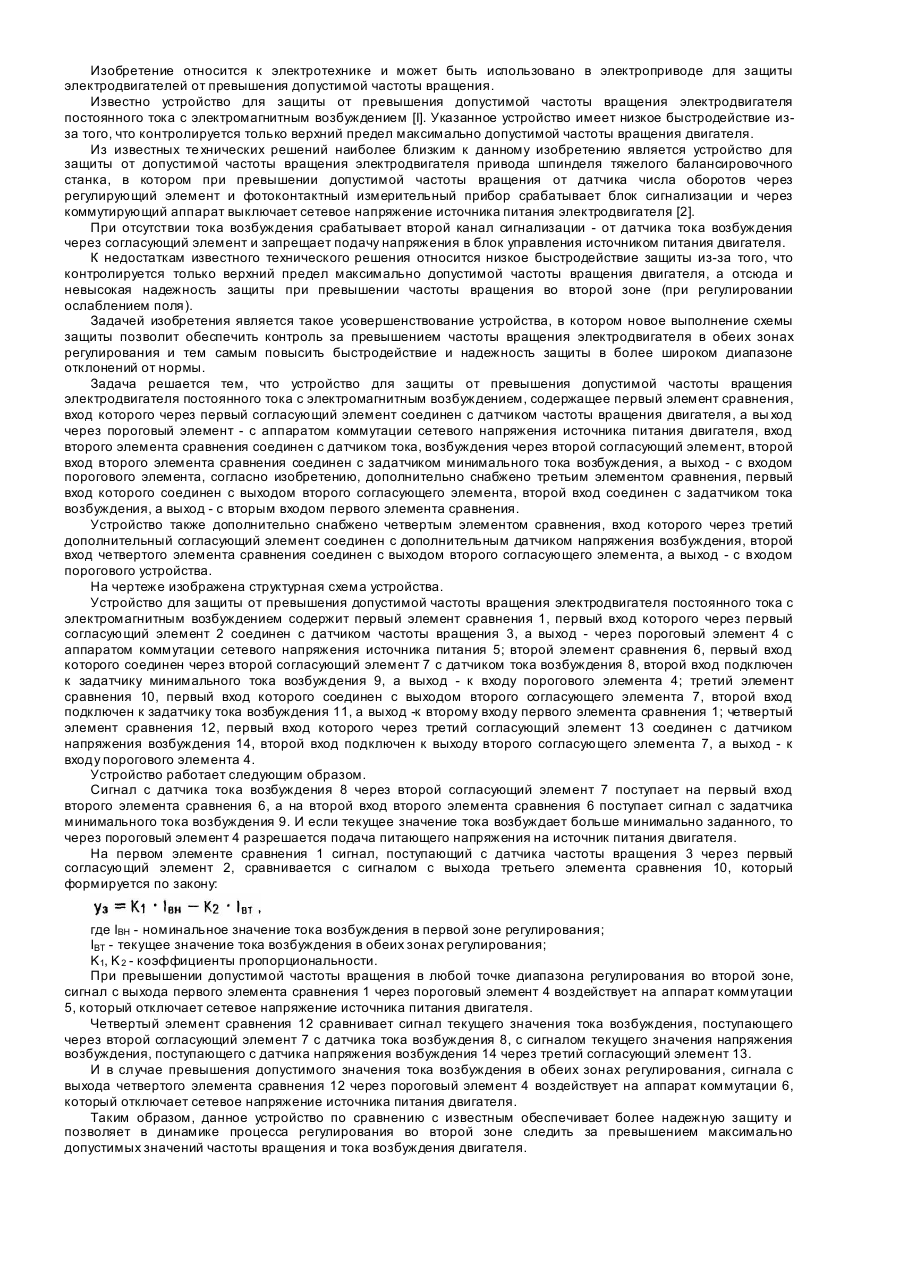
1. Устройство для защиты от превышения допустимой частоты вращения электро-двигателя постоянного тока с электромагнитным возбуждением, содержащее первый элемент сравнения, вход которого через первый согласующий элемент соединен с датчиком частоты вращения двигателя, а выход через пороговый элемент - с аппаратом коммутации сетевого напряжения источника питания двигателя, вход второго элемента сравнения соединен с датчиком тока возбуждения...
П’єзоелектричний двигун
Номер патенту: 849
Опубліковано: 15.12.1993
Автори: Петренко Сергій Федорович, Берсеньов Валерій Якович, Голов'яшин Юрій Володимирович, Шишов Юрій Георгійович
Мітки: двигун, п'єзоелектричний
Формула / Реферат:
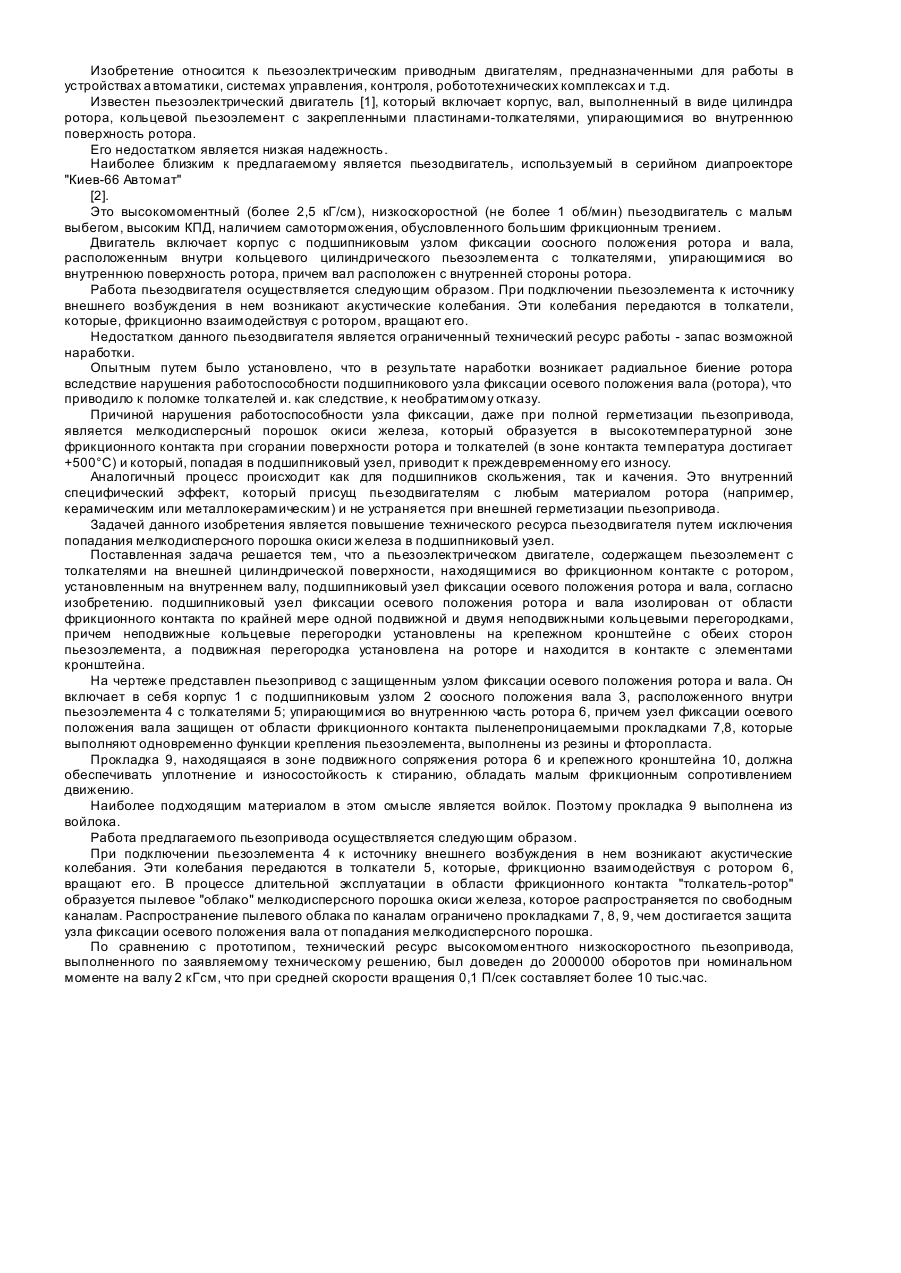
Пьезоэлектрический двигатель, содержащий пьезоэлемент с толкателями на внешней цилиндрической поверхности, находящимися во фрикционном контакте с ротором, установленным на внутреннем валу. подшипниковый узел фиксации осевого положения ротора и вала, отличающийся тем, что подшипниковый узел фиксации осевого положения ротора и вала изолирован от области фрикционного контакта по крайней мере одной подвижной и двумя неподвижными кольцевыми...
Спосіб збудження сейсмічних хвиль
Номер патенту: 4325
Опубліковано: 27.12.1994
Автори: Гонтовий Іван Захарович, Роман Володимир Іванович, Шпортюк Григорій Авксентійович, Сиротенко Петро Тимофійович
МПК: G01V 1/02
Мітки: сейсмічних, спосіб, хвиль, збудження
Формула / Реферат:
Способ возбуждения сейсмических волн электромеханическим преобразователем энергии, активная часть которого установлена на грунт, включающий сбрасывание реактивной части и ее торможение активной частью за счет подачи электрического импульса с упреждением относительно момента максимального сближения активной и реактивной частей, отличающийся тем, что, с целью повышения сейсмической эффективности путем увеличения мощности сигнала и частоты...
Пристрій керування джерелом сейсмічних хвиль
Номер патенту: 4330
Опубліковано: 27.12.1994
Автори: Роман Володимир Іванович, Канєвський Володимир Федорович, Сиротенко Петро Тимофійович
МПК: G01V 1/02
Мітки: керування, сейсмічних, джерелом, пристрій, хвиль
Формула / Реферат:
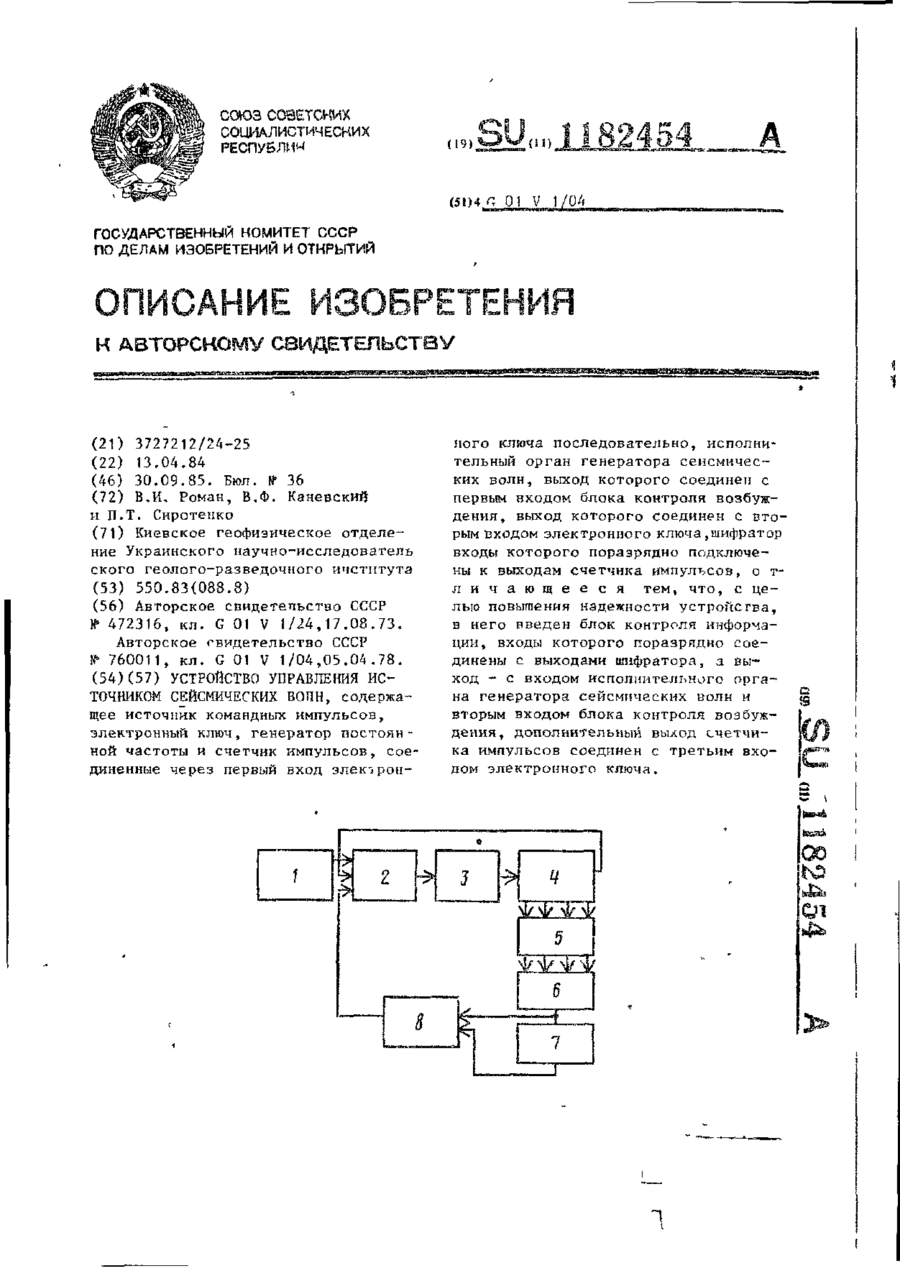
Устройство управления источником сейсмических волн, содержащее источник командных импульсов, электронный ключ, генератор постоянной частоты и счетчик импульсов, соединенные через первый вход электронного ключа последовательно, исполнительный орган генератора сейсмических волн, выход которого соединен с первым входом блока контроля возбуждения, выход которого соединен с вторым входом электронного ключа, шифратор входы которого поразрядно...
Попередній патент: Спосіб визначення параметрів іонізуючого випромінювання оптоволоконним дозиметром
Наступний патент: Жолоб з періодичним змивом
Випадковий патент: Ізомерні азовмісні біс-гідроксибензальдегіди з фрагментами тетрафторобензолу як мономери для азовмісних полімерів