Спосіб дистанційного керування виконавчим механізмом
Формула / Реферат
Спосіб дистанційного керування виконавчим механізмом, який здійснюють шляхом використання сигналів, що приводять в дію відповідні пристрої, при якому за допомогою органів зору людини спостерігають, виявляють, ідентифікують об'єкт, що досліджується, а після аналізу даних віддають команду на спрацювання виконавчого механізму, який відрізняється тим, що спочатку результати спостереження органів зору зчитують мікросенсором, де перетворюють їх в електричні сигнали, які подають на мікропроцесор, де досліджують динаміку та коректність, встановлюють кореляцію даних спостереження, формують і подають сигнал на спрацювання виконавчого механізму.
Текст
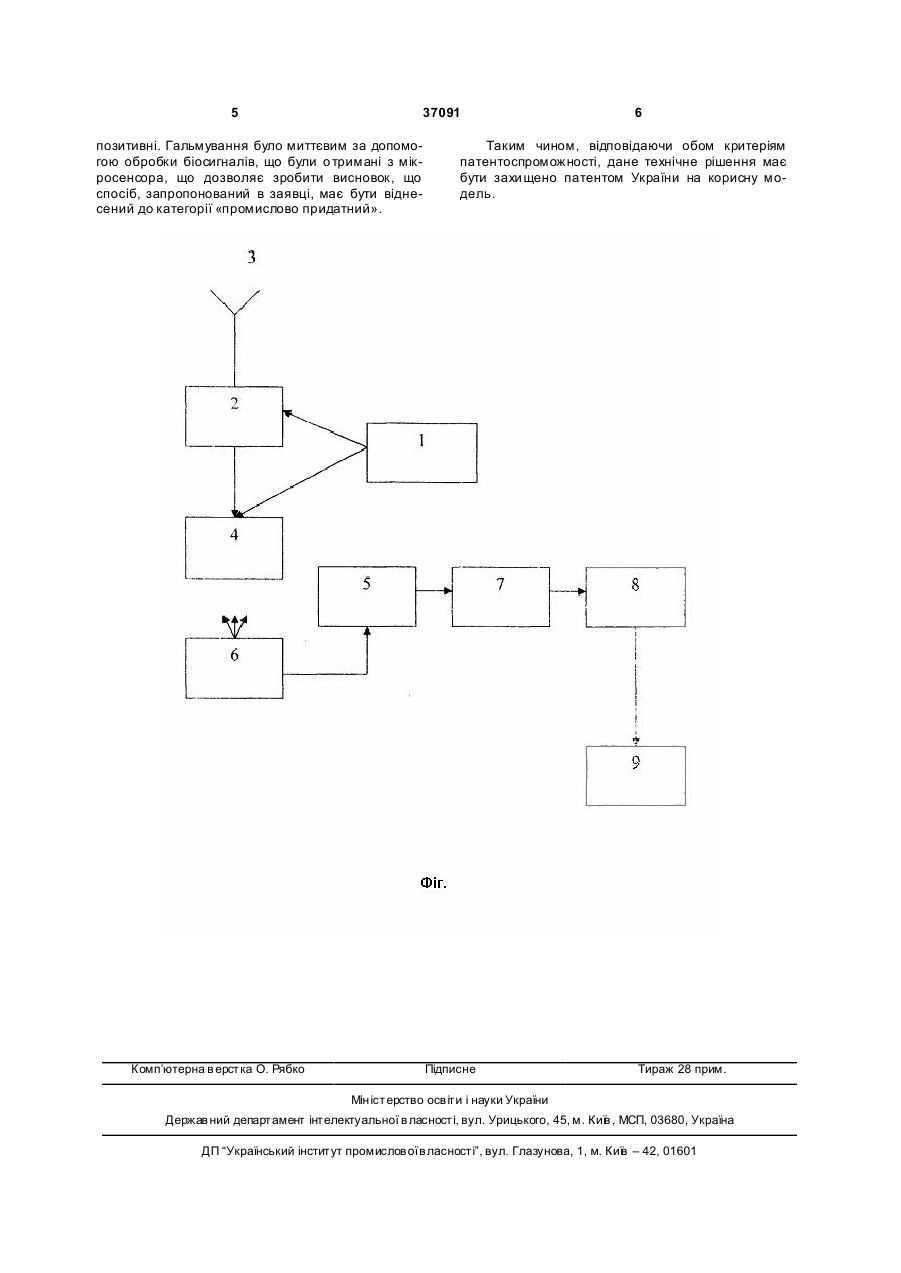
Спосіб дистанційного керування виконавчим механізмом, який здійснюють шляхом використання сигналів, що приводять в дію відповідні пристрої, при якому за допомогою органів зору людини спостерігають, виявляють, ідентифікують 3 37091 вирішень, а потім приводять в дію виконавчий механізм. Слід зазначити досить складний спосіб досягнення мети використання складного технологічного вирішення задачі, занадто вузько цілеспрямоване коло можливостей використання відомої технології, що не відповідає сучасним вирішенням питань керування виконавчим механізмом: потрібний портативний мобільний простий універсальний і надійний спосіб керування, який може бути використаний в різних галузях, особливо в цілях захисту, оборони, екстремальних випадках рятування здоров'я, життя, цінностей і т. ін. В основу корисної моделі, що пропонується покладено завдання ліквідації вищезазначених недоліків відомої технології та створення такого способу дистанційного керування виконавчим механізмом, який би забезпечив простоту і надійність технологічного циклу, надійність спрацювання всіх ланок, універсальність застосування в різних життєви х та технічних ситуаціях, мобільність та портативність на базі використання сучасної елементної бази та схемних вирішень. Ця задача вирішується наступним шляхом: спосіб дистанційного керування виконавчим механізмом шляхом використання сигналів, що приводять в дію відповідні пристрої, при якому за допомогою органів зору людини спостерігають, виявляють, ідентифікують об'єкт, який досліджують, шукають або контролюють, а після аналізу даних віддають команду на спрацювання виконавчого механізму, в якому, на відміну від відомогоспособу, що є прототипом, спершу результати спостереження, розпізнавання органів зору зчитують мікро сенсором, де перетворюють їх в електричні сигнали, які потім подають на мікропроцесор, де досліджують динаміку та коректність та встановлюють кореляцію даних спостереження, розпізнання, формують і подають сигнал на спрацювання виконавчого механізму. Таке удосконалення способу дозволить мати значні переваги у порівнянні з відомими технологіями, зокрема з прототипом. Поруч із зменшенням габаритів, що досягається за рахунок використання більш сучасної елементної приладної бази, маємо портативний мобільний універсальний спосіб, що забезпечує вирішення поставленої задачі за рахунок застосування сучасних методів апаратування процесів, що забезпечують використання запропонованої технології досить надійно і оперативно в можливих екстремальних чи рятувальних ситуаціях в piзних посталих умовах. Причинно-наслідковий зв'язок між достатніми в усіх випадках істотними ознаками запропонованого технологічного рішення і отриманими підсумковими технічними результатами забезпечують нові технічні та технологічні якості, дозволяють в сполученні з відомими ознаками одержати позитивні результати, означені в постановці задачі. За наявними у заявника відомостями з патентних та інформаційних джерел як вітчизняних, так і зарубіжних, запропонована сукупність ознак, що характеризує суть корисної моделі, невідома з 4 рівня техніки, тобто корисна модель відповідає критерію «новизна». Суть корисної моделі пояснюється кресленням, на якому схематично зображений принцип досягнення вирішення задачі дистанційного керування виконавчим механізмом, так би мовити, варіант моделювання запропонованого способу. Здійснюють запропоноване технічне рішення таким чином. Спочатку про склад елементів реалізації способу, що проілюстрований на кресленні, та функціональний зв'язок між ними. Схема має блок живлення 1, що підживлює інші елементи схеми, зокрема передавач визначаючих сигналів 2 з антеною 3 та приймач-коректор сигналів 4. Далі, приймач-мікросенсор 5, що безпосередньо пов'язаний і органами зору людини 6 і одержує звідти інформацію у вигляді біосигналів і зчитує їх. Потім передає на мікропроцесор 7 сформовані сигнали, де їх коректують, аналізують, корелюють, і вони поступають на приймальний блок-привода виконавчого механізму 8, звідкіля передаються на спрацювання виконавчого механізму 9. Такий функціональний зв'язок забезпечує наступну тe xнoлогічну схему. Блок живлення 1 забезпечує функціонування запропонованого способу дистанційного керування виконавчим механізмом, живлячи передавач визначаючих сигналів 2 з антеною 3 та приймач коректор 4, що забезпечує об'єм інформації про склад, якість, кількість і т. ін, об'єктів спостереження і дає їх панорамне зображення. Органи зору людини 6 сприймають інформацію як з зображення приймача-коректора 4, так і безпосередньо з навколишнього простору (як дозволяють умови, що склались). Таким чином, передбачені всі умови як візуальні, так і автоматичні електронні, спостереження виявлення об'єкту, що досліджується чи контролюється, що значно розширює діапазон дій оператора (хто б він не був: водій, диспетчер, поліцейський, охоронець, тренер і т.д.) Далі дані, що отримані органами зору 6, автоматично зчитуються мікро сенсором 5, який сприймає біосигнали і попередньо обробляє їх, посилаючи дані на корекцію і кореляцію в мікропроцесор 7, де вони аналізуються на динаміку та коректність. При цьому, відновлюється кореляція даних спостереження і формується за результатами аналізу управляючий сигнал, який подають на приймальний блок виконавчого механізму 8, що дає сигнал на спрацювання виконавчого механізму 9. Такий спосіб забезпечує миттєву реакцію на виникнення будь-яких обставин та їх ліквідацію чи покращення. Технологія була змодельована в лабораторних умовах, де показала можливість здійснення, але, при цьому, були виявлені деякі труднощі при конструюванні елементів схеми, їх узгодження. Потім позитивні результати лабораторних досліджень були віднесені в природні умови для прикладних іспитів та досліджень. Спосіб був реалізований при аварійному гальмуванні автомобіля. Схема була змонтована лабораторного типу як модель, але результати досліджень і проведених експериментів також були 5 37091 позитивні. Гальмування було миттєвим за допомогою обробки біосигналів, що були о тримані з мікросенсора, що дозволяє зробити висновок, що спосіб, запропонований в заявці, має бути віднесений до категорії «промислово придатний». Комп’ютерна в ерстка О. Рябко 6 Таким чином, відповідаючи обом критеріям патентоспроможності, дане технічне рішення має бути захи щено патентом України на корисну модель. Підписне Тираж 28 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for remote control of executive mechanism
Автори англійськоюRasin Kostiantyn Mykhailovych
Назва патенту російськоюСпособ дистанционного управления исполнительным механизмом
Автори російськоюРасин Константин Михайлович
МПК / Мітки
МПК: G01S 17/00
Мітки: виконавчим, спосіб, керування, дистанційного, механізмом
Код посилання
<a href="https://ua.patents.su/3-37091-sposib-distancijjnogo-keruvannya-vikonavchim-mekhanizmom.html" target="_blank" rel="follow" title="База патентів України">Спосіб дистанційного керування виконавчим механізмом</a>
Спосіб і пристрій контролю електричної мережі та безконтактного електронного управління електромагнітним виконавчим механізмом
Номер патенту: 73199
Опубліковано: 15.06.2005
Автори: Ординський Анатолій Борисович, Євсєйчик Віталій Федорович
Мітки: електромагнітним, механізмом, контролю, електричної, виконавчим, управління, електронного, пристрій, мережі, безконтактного, спосіб
Формула / Реферат:
1. Спосіб контролю електричної мережі і безконтактного електронного управління електромагнітним виконавчим механізмом, при якому здійснюють контроль напруги живлення з припустимими межами її зміни і керують величиною напруги на котушці електромагніта шляхом зміни часу відкритого й закритого стану ключового елементу за допомогою вихідних сигналів порогових органів, який відрізняється тим, що аналізують наявність, відсутність або відхилення...
Трос дистанційного керування
Номер патенту: 21250
Опубліковано: 15.03.2007
Автори: Макутонін Юрій Михайлович, Кузнєцов Олександр Федорович, Голенко Едуард Євгенович
МПК: F16C 1/10
Мітки: керування, трос, дистанційного
Формула / Реферат:
1. Трос дистанційного керування, що складається з коаксіально розташованих округлого осердя, виконаного зі сталевого каната і зовнішнього кожуха та встановлених на них з обох кінців пристроїв кріплення троса з одного боку до механізму керування і з другого боку до виконавчого механізму, причому кожен з цих пристроїв включає пруток, закріплений на осерді, ковпачок, закріплений на поверхні кожуха, на них встановлені елементи кріплення, а саме...
Спосіб застосування уніфікованої димової шашки в системі дистанційного керування димопуском
Номер патенту: 13998
Опубліковано: 17.04.2006
Автор: Коваль Володимир Валерійович
МПК: F41H 9/00
Мітки: застосування, уніфікованої, спосіб, дистанційного, шашки, димової, системі, димопуском, керування
Формула / Реферат:
Спосіб застосування уніфікованої димової шашки в системі дистанційного керування димопуском, при якому встановлюють уніфіковану димову шашку, знімають транспортувальний ковпак уніфікованої димової шашки, видаляють ізоляційну стрічку з дротів електрозапалювача уніфікованої димової шашки, під'єднують дроти електрозапалювача уніфікованої димової шашки до виходів виконавчого радіоприладу, подають команду на виконавчий радіоприлад з радіостанцій...
Система керування стрілоподібним виконавчим органом
Номер патенту: 37500
Опубліковано: 15.05.2001
Автори: Трубчанін Віктор Іванович, Данилов Володимир Миколайович, Антипов Віктор Тимофійович, Трубчанін Володимир Вікторович, Колсно Анатолій Прокопович
МПК: E21C 27/24
Мітки: стрілоподібним, система, керування, органом, виконавчим
Формула / Реферат:
Система керування стрілоподібним виконавчим органом прохідницького комбайна, що містить гідроциліндри телескопа, повороту і підйому-опускання виконавчого органа, закріпленого на корпусі, напірні та зливні магістралі, помпи, гідроблок керування гідроциліндрами телескопа, гідроблок керування гідроциліндрами повороту і підйому-опускання, силовий гідроблок з розподільниками для забезпечення роботи гідроциліндрів телескопа, повороту і...
Пристрій керування буровим виконавчим органом гірничодобувної машини
Номер патенту: 16632
Опубліковано: 15.08.2006
Автори: Солдатов Олександр Іванович, Майборода Сергій Валентинович, ДОРОШ СЕРГІЙ ІВАНОВИЧ, Гриценко Геннадій Дмитрович, Кретов Олексій Михайлович
МПК: E21C 35/24
Мітки: машини, буровим, органом, керування, гірничодобувної, виконавчим, пристрій
Формула / Реферат:
Пристрій керування виконавчим органом гірничодобувної машини, що містить датчик межі «вугілля-порода», гідроциліндр керування і гідроблок з електромагнітним керуванням, який відрізняється тим, що пристрій розміщений в герметичному корпусі, установленому на необертовій частині шнекового поставу, і споряджений гідробаком і гідронасосом з підвищувальним редуктором, при цьому датчик межі «вугілля-порода» містить гідроциліндр двосторонньої дії,...
Попередній патент: Спосіб корекції енергетичного обміну в тканинах печінки за умов інтоксикації рифампіцином
Наступний патент: Спосіб захисту міокарда при корекції мітральної вади серця
Випадковий патент: Висівний апарат