Система керування стрілоподібним виконавчим органом
Номер патенту: 37500
Опубліковано: 15.05.2001
Автори: Трубчанін Віктор Іванович, Трубчанін Володимир Вікторович, Антипов Віктор Тимофійович, Колсно Анатолій Прокопович, Данилов Володимир Миколайович

Формула / Реферат
Система керування стрілоподібним виконавчим органом прохідницького комбайна, що містить гідроциліндри телескопа, повороту і підйому-опускання виконавчого органа, закріпленого на корпусі, напірні та зливні магістралі, помпи, гідроблок керування гідроциліндрами телескопа, гідроблок керування гідроциліндрами повороту і підйому-опускання, силовий гідроблок з розподільниками для забезпечення роботи гідроциліндрів телескопа, повороту і підйому-опускання, яка відрізняється тим, що в ній установлені додаткові магістралі з клапаном АБО, за допомогою яких гідроблоки керування сполучені між собою.
Текст
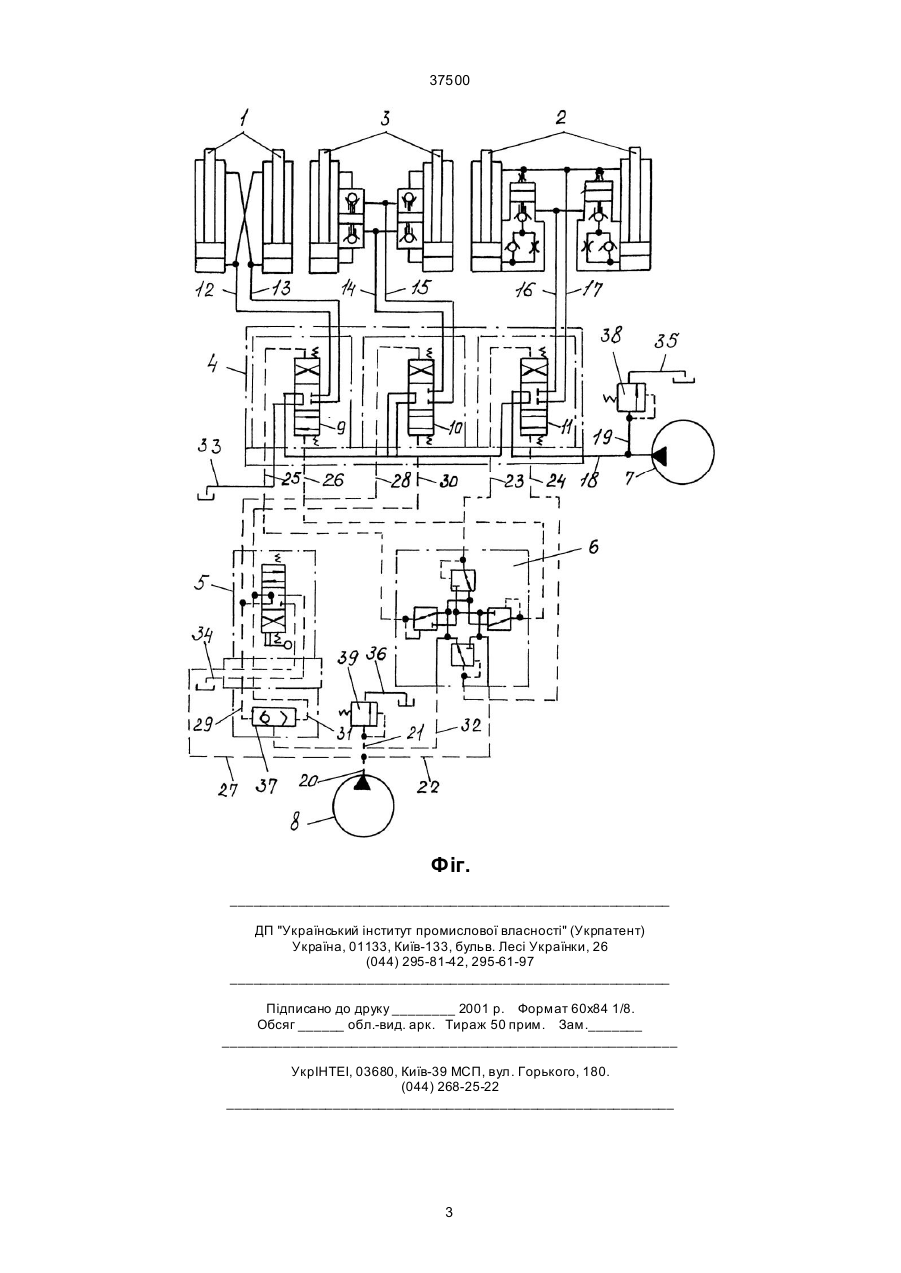
Система керування стрілоподібним виконавчим органом прохідницького комбайна, що містить 37500 рування з'єднані між собою, виключає одночасну роботу гідроциліндрів телескопа - подача різального органу на вибій та гідроциліндрів повороту або гідроциліндрів підйому-опускання виконавчого органу. Неможливість одночасної роботи гідроциліндрів телескопа (подача різального органу на вибій та його втягання) досягається за рахунок того, що потік робочої рідини, який діє на розподільник, забезпечуючий роботу гідроциліндрів телескопа, через клапан АБО поступає до гідроблоку керування гідроциліндрами повороту і підйому-опускання виконавчого органу і одночасно подається під торці розподільників силового гідроблоку, забезпечуючих роботу ци х гідроциліндрів, і утримує розподільники в нейтральному положенні, тим самим виключаючи можливість роботи гідроциліндрів повороту і підйому-опускання виконавчого органу. В результаті цього забезпечується значне зниження питомого тиску на направляючі балки. В той же час при установці рукоятки гідроблоку керування гідроциліндрами телескопа в нейтральне положення робоча рідина з-під торців розподільників силового гідроблоку, забезпечуючих роботу гідроциліндрів повороту і підйому-опускання, через гідроблок керування цими гідроциліндрами відводиться в бак і дозволяється їх робота. Таким чином, забезпечується можливість роздільного керування гідроциліндрами повороту і підйому-опускання, внаслідок чого також: досягається зниження питомого тиску на направляючі балки. На фігурі зображено принципіальну схему керування стрілоподібним органом прохідницького комбайну. Система керування стрілоподібним виконавчим органом містить гідроциліндри 1 повороту і гідроциліндри 2 підйому-опускання виконавчого органу, гідроциліндри 3 телескопа, силовий гідроблок 4, гідроблок керування 5 гідроциліндрами 3, гідроблок керування 6 гідроциліндрами 1 і 2, помпу 7, подавальну робочу рідину до силового гідроблоку 4, помпу 8 ланцюгів керування, подавальну робочу рідину до гідро блоків керування 5 і 6. Силовий гідроблок 4 містить розподільники 9, 10 і 11, забезпечуючи х роботу гідроциліндрів 1, 3 і 2 відповідно. Порожнини гідроциліндрів 1-3 приєднані до силового гідроблоку 4 магістралями 12-17. Система містить також напірні магістралі 18, 19, 20-32 та зливні магістралі 33-36. Гідроблоки керування 5 і 6 з'єднані між собою клапаном АБО 37 і магістралями 29, 31 і 32, а з розподільниками 9, 10 і 11 силового гідроблоку 4 - магістралями 23-26, а також 28. Система захищена від перевантаження клапанами запобіжними 38 і 39. Система керування стрілоподібним виконавчим органом працює наступним чином. При установці рукоятки гідроблоку керування 5 в положення "від себе" потік робочої рідини від помпи 8 ланцюгів керування по магістралям 20, 27 і 28 надходить під торець розподільника 10 силового гідроблоку 4, перемикає розподільник 10, через який потік робочої рідини від помпи 7 по магістралям 18 і 14 подається в поршневі порожнини гідроциліндрів 3 телескопа. Робоча рідина із штокових порожнин гідроциліндрів 3 по магістралям 15 і 33 відводиться в бак і здійснюється подача різального органу на вибій. Одночасно по магістралі 29 через клапан ЧИ 37 потік рідини помпи 8 ланцюгів керування по магістралі 32 надходить до гідроблоку керування 6, через який по магістралям 23-26 подається під торці розподільників 9 і 11 силового гідроблоку 4 і утримує їх в нейтральному положенні, тим самим виключаючи роботу гідроциліндрів підйому-опускання і повороту, навіть коли проводяться перемикання рукояткою блоку керування 6. При установці рукоятки блоку керування 5 в нейтральне положення робоча рідина з-під торців розподільників 9-11 по магістралям 23-26, 32, 28, 30, 29 чи 31, 34 відводиться в бак, і дозволяється робота гідроциліндрів підйому-опускання і повороту виконавчого органу при установці рукоятки блоку керування 6 в будь-яке положення. Наприклад при установці рукоятки блоку керування 6 в положення "від себе" потік рідини від помпи 8 ланцюгів керування по магістралям 20, 22 і 23 надходить під торець розподільника 11 силового гідроблоку 4 і перемикає розподільник 11. Потік робочої рідини подається від помпи 7 по магістралям 18 і 17 в штокові порожнини гідроциліндрів 2 підйому-опускання. Робоча рідина із поршневих порожнин по магістралям 16 і 33 відводиться в бак і виконується опускання виконавчого органу. При досягненні заданих величин тиску в системі або в ланцюгах керування робоча рідина подається до клапанів запобіжних 38 чи 39 відповідно і по зливним магістралям 35 чи 36 відводиться в бак. Система керування стрілоподібним виконавчим органом прохідницького комбайну забезпечує роздільну роботу гідроциліндрів виконавчого органу і виключає одночасну роботу гідроциліндрів телескопа - подачу різального органу на вибій і гідроциліндрів підйому опускання чи гідроциліндрів повороту, що дозволяє знизити питомий тиск на направляючі балки і в результаті збільшити строк служби направляючих балок. 2 37500 Фіг. __________________________________________________________ ДП "Український інститут промислової власності" (Укрпатент) Україна, 01133, Київ-133, бульв. Лесі Українки, 26 (044) 295-81-42, 295-61-97 __________________________________________________________ Підписано до друку ________ 2001 р. Формат 60х84 1/8. Обсяг ______ обл.-вид. арк. Тираж 50 прим. Зам._______ ____________________________________________________________ УкрІНТЕІ, 03680, Київ-39 МСП, вул. Горького, 180. (044) 268-25-22 ___________________________________________________________ 3
ДивитисяДодаткова інформація
Назва патенту англійськоюSystem for control of boom-like executive body
Автори англійськоюTrubchanin Viktor Ivanovych, Trubchanin Volodymyr Viktorovych, Danylov Volodymyr Mykolaiovych, Kolsno Anatolii Prokopovych, Antypov Viktor Tymofiiovych
Назва патенту російськоюСистема управления стрелоподобным исполнительным органом
Автори російськоюТрубчанин Виктор Иванович, Трубчанин Владимир Викторович, Данилов Владимир Николаевич, Колсно Анатолий Прокопович, Антипов Виктор Тимофеевич
МПК / Мітки
МПК: E21C 27/24
Мітки: виконавчим, система, керування, органом, стрілоподібним
Код посилання
<a href="https://ua.patents.su/3-37500-sistema-keruvannya-strilopodibnim-vikonavchim-organom.html" target="_blank" rel="follow" title="База патентів України">Система керування стрілоподібним виконавчим органом</a>
Система автоматичного керування виконавчим органом прохідницького комбайну виборчої дії
Номер патенту: 7626
Опубліковано: 26.12.1995
Автори: Грінєвіч Євген Юрьєвич, Альперовіч Михайло Євгенович, Шумалінський Семен Овсійович, Войтюк Клим Кириллович, Сіненко Віктор Васильович, Злодєєв Олександр Васильович
МПК: E21C 35/24
Мітки: виборчої, керування, виконавчим, автоматичного, органом, прохідницького, дії, система, комбайну
Формула / Реферат:
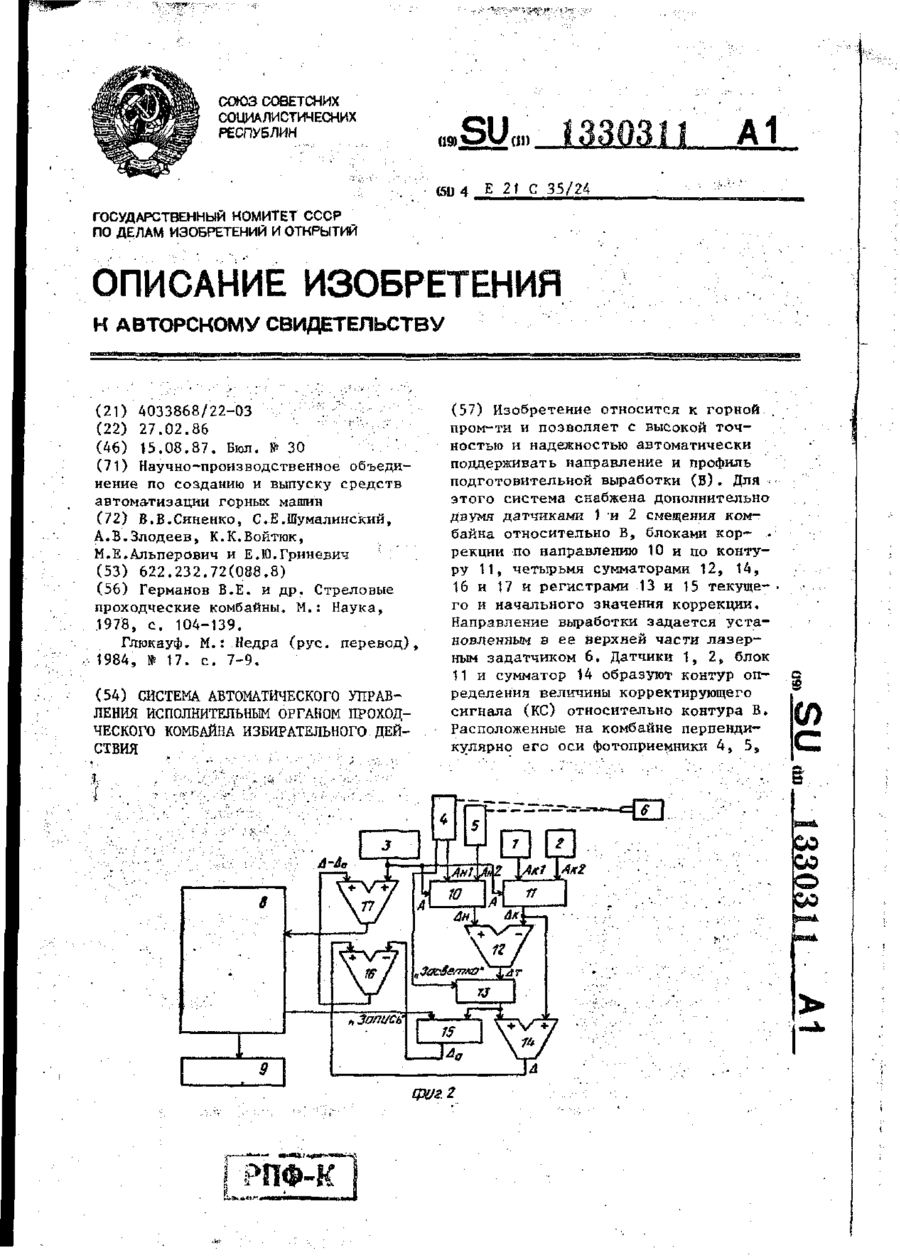
Система автоматического управления исполнительным органом проходческого комбайна избирательного действия, содержащая блок программного управления, блок исполнительных механизмов, датчик горизонтального положения исполнительного органа и задатчик направления лазерный, оптически связанный с двумя фотоприемниками, расположенными на комбайне один за другим перпендикулярно его продольной оси, отличающаяся тем, что, с целью повышения скорости...
Система автоматичного керування регулюючим органом гідромашини
Номер патенту: 15516
Опубліковано: 30.06.1997
Автори: Ушомирський Боріс Аронович, Пожидаєв Віталій Іванович, Шилов Валерій Павлович
МПК: F15B 1/00, F03B 15/00
Мітки: автоматичного, система, регулюючим, керування, гідромашини, органом
Формула / Реферат:
(57) Система автоматического управления регулирующим органом гидромашины, содержащая аккумулятор давления, гидравлический поршневой сервомотор с полостями давления и слива, соединенный с ним командоаппарат, главный золотник, подключенный к аккумулятору давления, и золотник, установленный между главным золотником и сервомотором, и соединяющий в одной из позиций полости последнего между собой и с аккумулятором давления по сигналу...
Спосіб управління стріловим виконавчим органом гірничо-прохідницького комбайну
Номер патенту: 7628
Опубліковано: 26.12.1995
Автори: Злодєєв Олександр Васильович, Шумалінський Семен Овсійович, Сіненко Віктор Васильович
МПК: E21C 35/24
Мітки: управління, комбайну, виконавчим, спосіб, органом, стріловим, гірничо-прохідницького
Формула / Реферат:
Способ управлення стреловым исполнительным органом горнопроходческого комбайна, заключающийся в выполнении образцового цикла обработки забоя, записи величины, направления и последовательности перемещений исполнительного органа и управлении перемещениями исполнительного органа при последующих циклах обработки забоя в соответствии с программой перемещений, записанной в течение образцового цикла, отличающийся тем, что, с целью повышения...
Пристрій для керування робочим органом прохідницького щита
Номер патенту: 9366
Опубліковано: 30.09.1996
Автори: Ліндаєв Володимир Вікторович, Фішман Йосип Давидович, Швиченко Олександр Володимирович, Гарькавий Володимир Андрійович, Сєров Євген Семенович, Мельников Іван Йосипович, Яроцький Микола Іванович
МПК: E21C 35/24, E21D 9/06
Мітки: щита, керування, органом, прохідницького, робочим, пристрій
Формула / Реферат:
Устройство для управления рабочим органом проходческой машины, содержащеедва насоса, напорные магистрали с предохранительными и обратными клапанами, два блока соединенных последовательно гидрораспределителей управления гидроцилиндрами рабочего органа и дополнительный пятилинейный гидрораспределитель, один вход которого соединен с напорной магистралью одного из насосов, напорный золотник, обратные клапаны, сливную магистраль, отличающееся...
Система керування трансмісії гусеничної машини
Номер патенту: 791
Опубліковано: 15.03.2001
Автори: Магерамов Лютфалій Курбан-Алієвич, Зімін Дмитро Борисович, Кудров Володимир Михайлович, Борисюк Михайло Дем'янович, Істратов Анатолій Васильович, Бусяк Юрій Митрофанович, Литвин-Попович Ігор Анатолійович
МПК: F16N 25/00, B62D 11/00
Мітки: машини, гусеничної, керування, система, трансмісії
Формула / Реферат:
Система керування трансмісії гусеничної машини, яка включає для кожного борту механізм розподілу, що містить картер з каналами подачі масла до бустерів фрикціонів коробки передач і розміщені в картері кулак перемикача передач і кулак повороту, пластина якого виконана у вигляді сектора з боковою профільованою поверхнею, яка відрізняється тим, що в кожний механізм розподілу введений двопозиційний чотириходовий золотник, розміщений у виконаній у...
Попередній патент: Вантажно-транспортний орган гірничопрохідницького комбайна
Наступний патент: Спосіб дегазації шахт (варіанти)
Випадковий патент: Аеросепаратор