Насосний привод преса
Номер патенту: 38570
Опубліковано: 12.01.2009
Формула / Реферат
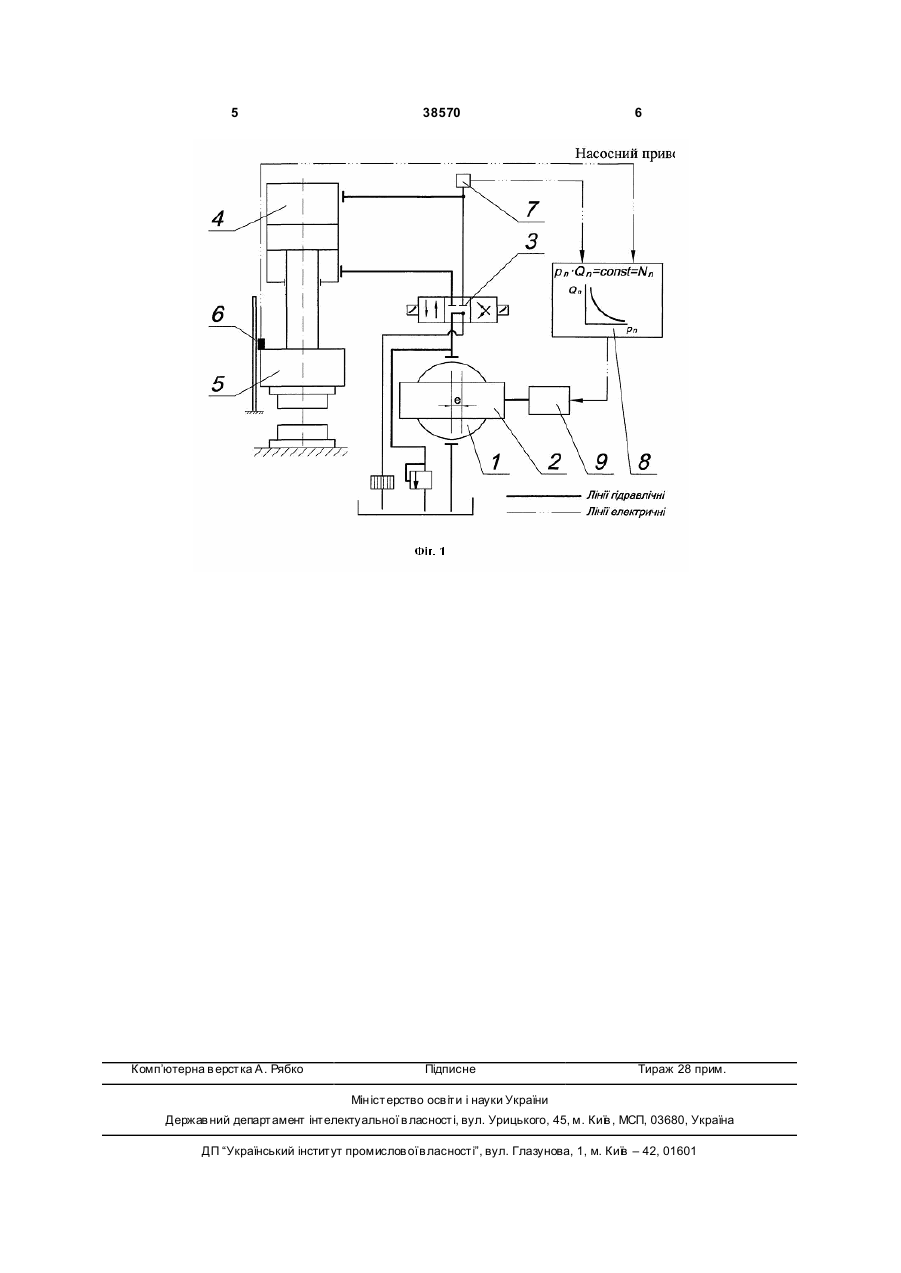
Насосний привод преса, що містить насосну установку змінної подачі з автоматичним приводом каретки, золотниковий розподільник, що керує роботою порожнин робочого циліндра, який відрізняється тим, що повзун преса оснащено датчиком переміщення, а робочий циліндр - датчиком тиску, при цьому ці датчики пов'язано з цифровим елементом керування, в який програмно закладено характеристику ідеального насоса, а каретку насоса змінної подачі оснащено гідравлічним слідкуючим сервоприводом, що керується від цифрового елемента керування в залежності від показань датчиків переміщення та тиску.
Текст
Насосний привод преса, що містить насосну установку змінної подачі з автоматичним приводом каретки, золотниковий розподільник, що керує 3 38570 оснащено гідравлічним слідкуючим сервоприводом, що керується від цифрового елемента керування в залежності від показань датчиків переміщення та тиску. Запропонований насосний привод преса забезпечує підвищення ефективного к.к.д. приводу упродовж всього робочого циклу преса, підвищену стійкість і стабільність роботи без автоколивань навіть при перемінних навантаженнях. Використання насоса зі змінною подачею, що керується від цифрового елемента керування, в який програмно закладено характеристику ідеального насоса, через гідравлічний слідкуючий сервопривід дозволяє максимально наблизити насосний привод до ідеального. Суть запропонованої корисної моделі пояснюється кресленням, на якому зображено схему насосного приводу преса. Насосний привод преса Фіг.1 містить насосну установку на базі насоса 1 змінної подачі з кареткою 2, золотниковий розподільник 3, що керує роботою порожнин робочого циліндру 4. Повзун 5 преса оснащено датчиком 6 переміщення, а робочий циліндр 4 - датчиком 7 тиску. Ці датчики пов'язано з цифровим елементом керування 8, в який програмно закладено характеристику ідеального насоса. Каретку 2 насоса 1 змінної подачі оснащено гідравлічним сервоприводом 9, що керується від цифрового елемента керування 8 в залежності від показників датчиків 6 і 7 переміщення та тиску. Насосний привод преса працює таким чином. У нейтральному положенні золотника 3 насос 1 працює на злив. Величина ексцентриситету каретки 2e=0. Для здійснення робочого ходу золотник 3 системою керування переміщується вправо, з'єднуючи поршневу порожнину робочого циліндра 4 з подачею насоса, а штокову - зі зливом. Повзун 5 переміщується униз. Показання від датчиків 6 і 7 надходять до цифрового елемента керування 8, який здійснює обробку цих сигналів. Програмно закладена у цифровий елемент керування 8 характеристика ідеального насоса має вид: pn·Qn=const=N n, (1) де pn - тиск, що розвивається насосом; Qn - подача насоса; Nn - номінальна потужність насосного приводу. Упродовж всього робочого ходу преса потужність, що розвивається насосним приводом, пропорційна потужності, що розвивається поршнем робочого циліндра 4 преса, що пересилює технологічне навантаження. Чим ближче потужність, що 4 розвивається, до номінальної, тим вище к.к.д. насосного приводу. Тому, дуже важливо на всіх етапах робочого ходу створювати такі умови, щоб потужність насосного приводу використовувалася повністю, тобто щоб привод по своїм характеристикам наближався до ідеального, у якого упродовж всієї роботи преса виконується співвідношення (1). Ідеальний насосний привод забезпечує постійність потужності на всьому робочому ході. При цьому ефективний к.к.д. наближається до 1.0. Значення pn надходить від датчика 7 тиску, а параметр Qn розраховується, як: dS , (2) Q n = Fn × dt де Fn - площа плунжера робочого циліндра 4; dS - швидкість руху повзуна 5 на шляху dS, dt що реєструється датчиком 6 переміщення, за проміжок часу dt. Значення параметрів pn і Qn підставляються у залежність (1) і отримане значення поточної потужності порівнюється з номінальним її значенням Nn. У випадку, якщо поточне значення потужності менше номінального Nn, цифровий елемент керування 8 подає сигнал на гідравлічний сервопривод 9, який переміщує каретку 2 насоса 1, збільшуючи ексцентриситет є, чим досягається збільшення подачі Qn насоса. Показання від датчиків 6 і 7 постійно надходять до цифрового елемента керування 8, який здійснює обробку цих сигналів, підтримуючи значення потужності Nn номінальним. Для підняття повзуна 5 уверх золотник 3 системою керування переміщується вліво, з'єднуючи поршневу порожнину робочого циліндра 4 зі зливом, а штокову - з подачею насоса. Повзун 5 переміщується увер х. Таким чином, такий насосний привод преса забезпечує можливість максимально наблизити насосний привод до ідеального, чим досягається отримання ефективного к.к.д. приводу близького до 1.0. Джерела інформації: 1. Свешников В.К., Усов А.А. Станочные гидроприводы: Справочник. - 2-е изд., пере-раб. и доп. - М.: Ма шиностроение, 1988. - с.29, рис.2.5. 2. Ми хеев В.А., Ям В.М., Поляков Б.И. Модернизация гидропрессового оборудования / М. - Л.: Машгиз, 1961. - с.8, фиг.1. 3. Бочаров Ю.А., Прокофьев В.Н. Гидропривод кузнечно-прессовых машин. Учеб. пособие для машиностроит. вузов. М.: Высшая школа, 1969. с.118. 5 Комп’ютерна в ерстка А. Рябко 38570 6 Підписне Тираж 28 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюPumping drive of press
Автори англійськоюShynkarenko Oleh Mykhailovych, Korchak Olena Serhiivna
Назва патенту російськоюНасосный привод пресса
Автори російськоюШинкаренко Олег Михайлович, Корчак Елена Сергеевна
МПК / Мітки
МПК: B21J 9/00
Мітки: насосний, привод, преса
Код посилання
<a href="https://ua.patents.su/3-38570-nasosnijj-privod-presa.html" target="_blank" rel="follow" title="База патентів України">Насосний привод преса</a>
Насосно-акумуляторний привод преса
Номер патенту: 37639
Опубліковано: 10.12.2008
Автори: Шинкаренко Олег Михайлович, Корчак Олена Сергіївна
МПК: B21J 9/00
Мітки: насосно-акумуляторний, преса, привод
Формула / Реферат:
Насосно-акумуляторний привод преса, що містить пневмогідравлічний акумулятор рідини високого тиску, повітряні балони компресора та насосну станцію з насосами, які зв'язані між собою системою трубопроводів з органами керування, який відрізняється тим, що привод виконано індивідуальним для окремого преса, акумулятор максимально наближено до преса та виконано поршневим з розділенням гідравлічного та повітряного середовищ з використанням...
Насосний агрегат обприскувача рослин
Номер патенту: 33871
Опубліковано: 15.02.2001
Автори: Ткачов Олександр Федірович, Бардін Олександр Єгорович, Коваль Володимир Павлович
МПК: A01M 7/00
Мітки: обприскувача, насосний, рослин, агрегат
Текст:
Привод кривошипного преса
Номер патенту: 30037
Опубліковано: 15.11.2000
Автор: Запорожченко Віталій Сергійович
МПК: B30B 15/00
Мітки: кривошипного, привод, преса
Формула / Реферат:
1. Привод кривошипного преса, що складається з електричного двигуна, приймального вала, розміщеного в підшипникових вузлах, із встановленим на ньому маховиком, а також зубчастих передач із вмонтованими в одну з них муфтою вмикання та гальмом, який відрізняється тим, що приймальний вал встановлено співвісно валу електричного двигуна і поєднано з останнім з'єднувальною муфтою, а маховик має óбід, навитий із високоміцного гнучкого...
Консольний насосний агрегат
Номер патенту: 62195
Опубліковано: 15.12.2003
Автор: Чорний Анатолій Петрович
МПК: F04C 15/00, F04B 17/00
Мітки: консольний, насосний, агрегат
Формула / Реферат:
Консольний насосний агрегат, що містить привід і фланцево з'єднаний з ним співвісно насос, що виконаний багатоступеневим з можливістю перейняття ступенів з інших, наприклад свердловинних насосів, який відрізняється тим, що фланцеве з'єднання насоса з приводом виконано через перехідний фланець, що містить приєднувальні елементи (виступ, заглиблення, отвори) з розмірами, відповідними насосу та приводу.
Привод для автономної подачі води
Номер патенту: 32927
Опубліковано: 10.06.2008
Автор: Євтушенко Єва Олегівна
МПК: E03B 3/00
Мітки: привод, води, автономно, подачі
Формула / Реферат:
Привод для автономної подачі води, що складається з насоса для подачі води, з'єднаний з джерелом енергії, який відрізняється тим, що як джерело енергії він містить фотоелемент, який підключений до насоса для подачі води через інвертор та акумулятор з контролером.
Попередній патент: Пневмоелектростанція
Наступний патент: Скло для скловолокна
Випадковий патент: Магнітометр