Привод кривошипного преса

Формула / Реферат
1. Привод кривошипного преса, що складається з електричного двигуна, приймального вала, розміщеного в підшипникових вузлах, із встановленим на ньому маховиком, а також зубчастих передач із вмонтованими в одну з них муфтою вмикання та гальмом, який відрізняється тим, що приймальний вал встановлено співвісно валу електричного двигуна і поєднано з останнім з'єднувальною муфтою, а маховик має óбід, навитий із високоміцного гнучкого елемента на несучий центр, причому направлення навивання обода маховика співпадає з направленням його обертання.
2. Привод кривошипного преса по п.1, який відрізняється тим, що високоміцний гнучкий елемент виконано у вигляді стрічки або дроту.
3. Привод кривошипного преса по пп.1, 2, який відрізняється тим, що площа поперечного перерізу високоміцного гнучкого елемента пропорційна квадрату його відстані від осі обертання.
Текст
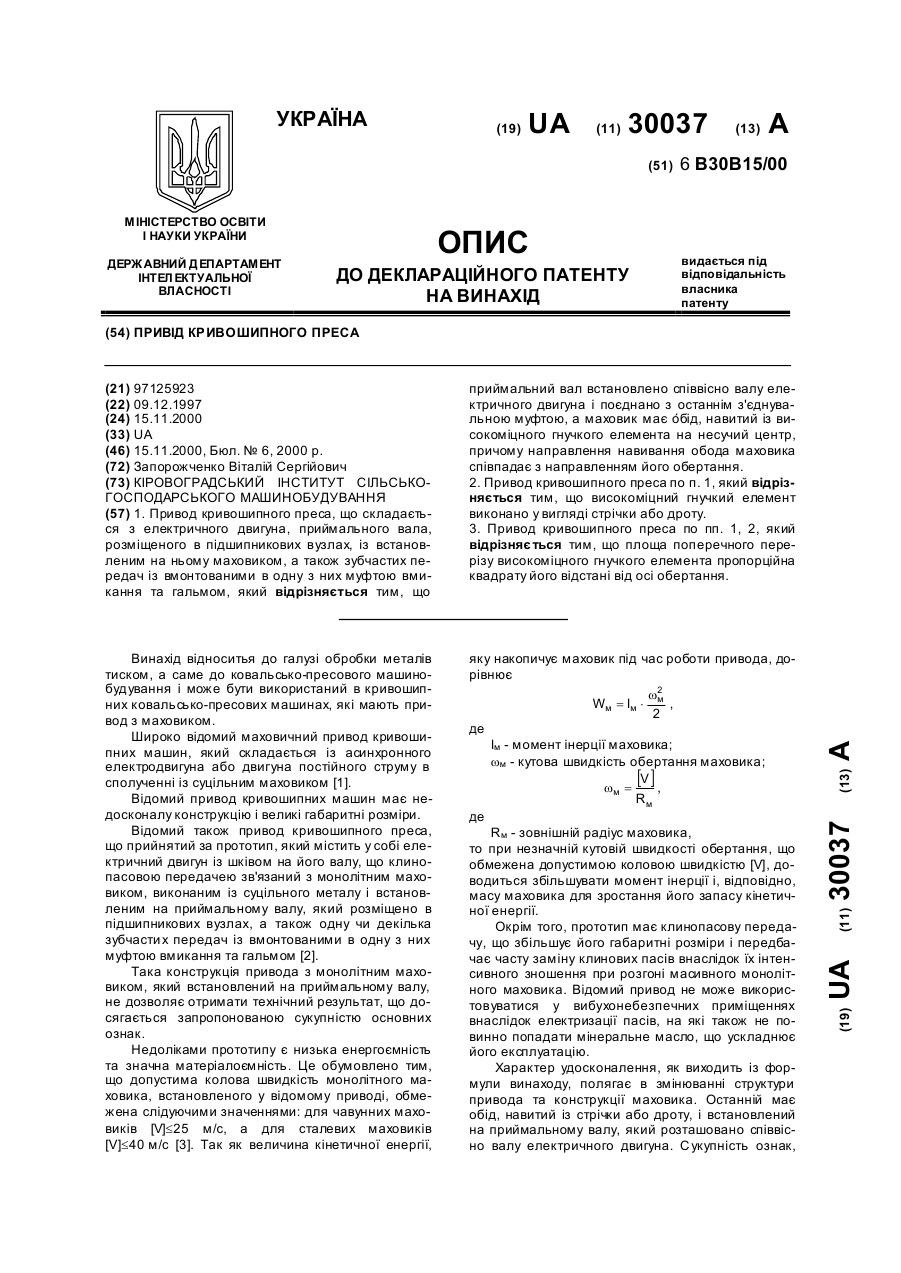
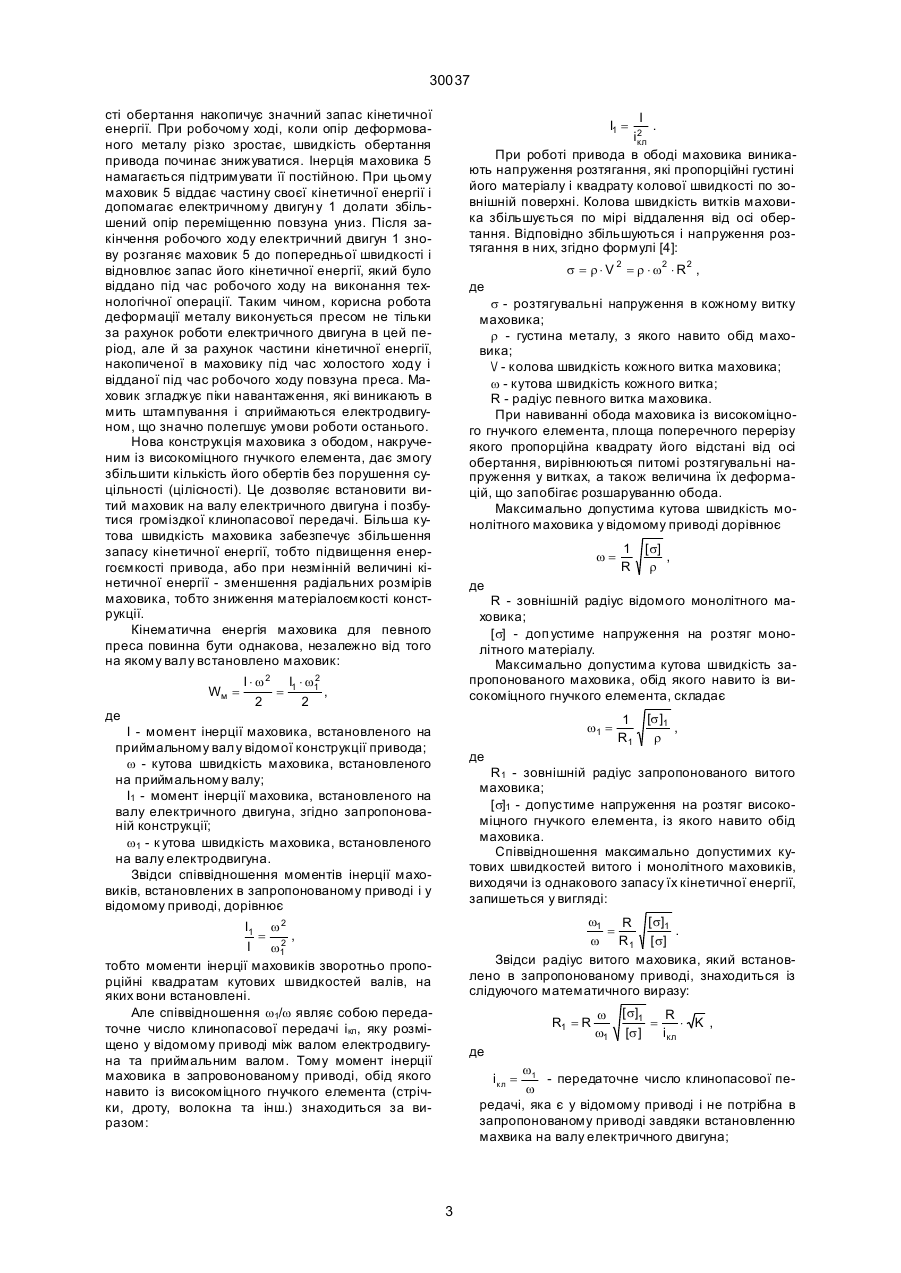
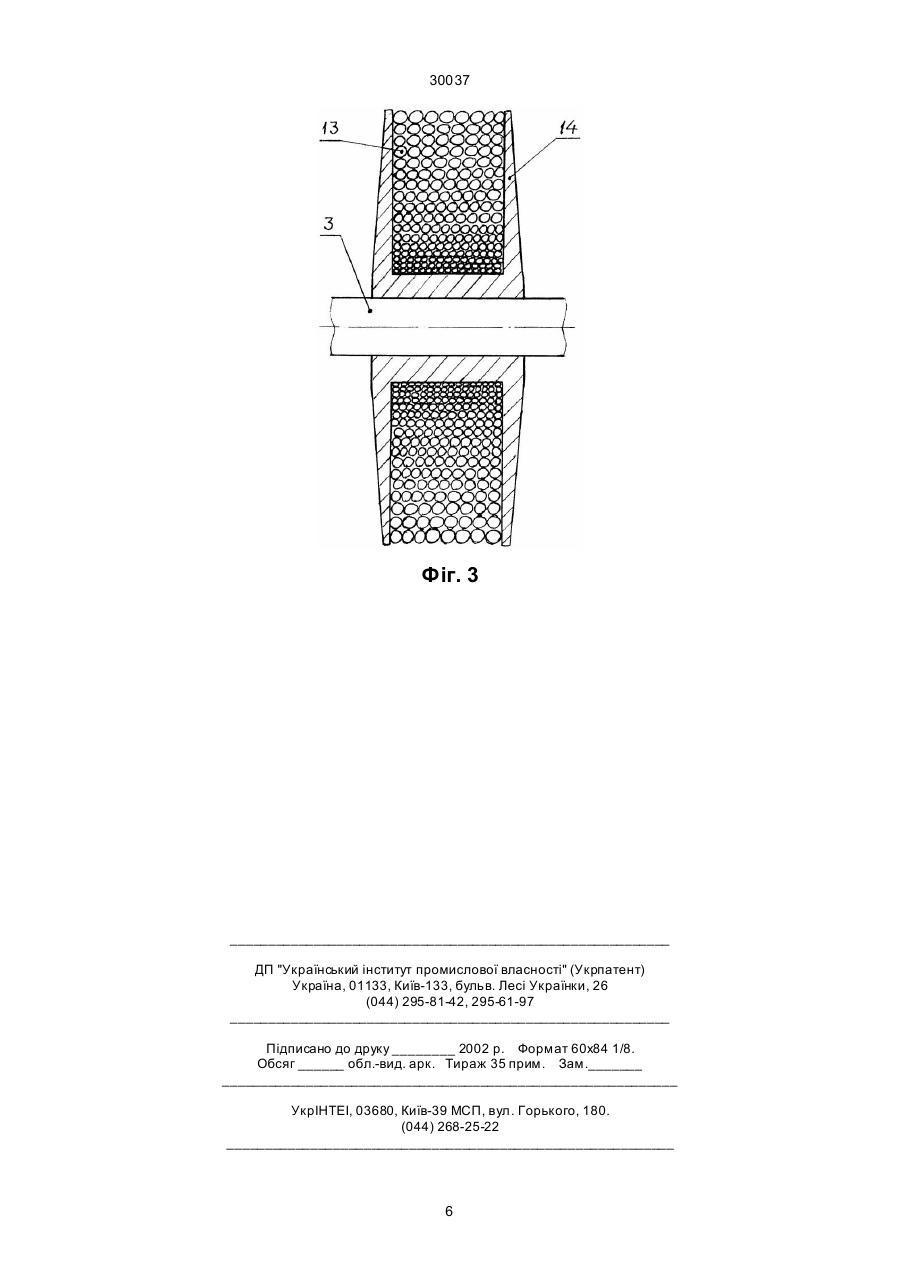
1. Привод кривошипного преса, що складається з електричного двигуна, приймального вала, розміщеного в підшипникових вузлах, із встановленим на ньому маховиком, а також зубчастих передач із вмонтованими в одну з них муфтою вмикання та гальмом, який відрізняється тим, що 30037 що пропонуються у формулі, забезпечує отримання нового, невідомого раніше ефекту у вигляді нової конструкції привода та маховика. Таким чином, відомий привод має великі габаритні розміри, значну матеріалоємкість і низьку енергоємність. В основу винаходу поставлена задача підвищення енергоємності і зменшення матеріалоємності та габаритних розмірів привода шляхом змінення конструкції маховика і місця його встановлення в приводі кривошипного преса. Поставлена задача вирішується тим, що у відомому приводі кривошипного преса, який складається із електричного двигуна, приймального вала, розміщеного в підшипникових вузлах, із встановленим на ньому маховиком, а також зубчастих передач із вмонтованими в одну з них муфтою вмикання та гальмом, приймальний вал встановлений співвісно валу електричного двигуна і поєднаний з останнім з'єднувальною муфтою, а маховик має обід, накручений із високоміцного гнучкого елемента на несучий центр, причому направлення навивання ободу маховика співпадає з направленням його обертання. При цьому високоміцний гнучкий елемент виконано у ви гляді стрічки або дроту. Окрім того, площа поперечного перерізу високоміцного гнучкого елемента може бути пропорційною квадрату його відстані від осі обертання. Технічним результатом винаходу є підвищення енергоємності і зниження матеріалоємності привода кривошипного преса. Одночасно таке рішення зменшує габаритні розміри привода. Винахід пояснюється кресленнями, де на фіг. 1 зображено кінематичну схему запропонованого привода кривошипного преса; на фіг. 2 показано маховик привода з ободом, накрученим із високоміцної гнучкої стрічки, а на фіг. 3 - маховик привода з ободом, накрученим із високоміцного дроту. Привод кривошипного преса складається із електричного двигуна 1, з'єднувальної муфти 2, приймального вала 3, розміщеного в підшипникових вузлах 4, із встановленим на ньому маховиком 5, а також зубчастої передачі, яка включає шестерню 6 та зубчасте колесо 7. В зубчасте колесо вмонтовано систему вмикання 8 преса, що складається із муфти і гальма. З'єднувальна муфта 2 єднає встановлені співвісно вал електродвигуна 1 і приймальний вал 3, а також запобігає перенавантаженню електричного двигуна, тобто є запобіжним пристроєм. Зубчасте колесо 7 встановлено на кривошипному валу 9, який поєднано шатуном 10 з повзуном преса (на кінематичній схемі привода останній не показано). В маховику 5 як високоміцний гнучкий елемент для навивання обода використовується високоміцна стрічка, дріт або волокна. Його встановлено в захисному кожусі (на кресленнях умовно не зображено). Нижній кінець високоміцної стрічки 11, із якої навито маховик, закріплено на несучому центрі 12 (див. фіг. 2), а коли обід маховика виконано із високоміцного дроту 13, то його навито на несучий центр із щоками 14 (див. фіг. 3). Ці несучі центри закріплено на приймальному валу 3 будь-яким відомим засобом (за допомогою шпонки, шліців, посадки з натягом та інш.). Виконання обода маховика з навитої високоміцної гнучкої стрічки або високоміцного дроту обумовлено тим, що максимальну міцність метал має саме у вигляді стрічки чи дроту. Стрічка або дріт завдяки їх внутрішній стр уктурі, яка утворена холодним прокатуванням чи волочінням, мають міцність значно вищу міцності початкового монолітного матеріалу. Наприклад, монолітний метал із сталі 45 має межу міцності при розтяганні, що дорівнює 580 МПа, а стрічка товщиною 1…4 мм, яку виготовлено з того самого металу - до 700 Мпа. Межа міцності дроту із сталі 45 досягає 1100 МПа. Витки стрічки скріплені між собою будь-яким засобом, що не зменшує міцності стрічки, наприклад, склеєні. Клей мусить бути достатньо еластичним для того, щоб заповнити собою зазори між витками стрічки, які утворюются при обертанні маховика за рахунок неоднакового розширення витків різного діаметра. Можливо також бандажування ободу маховика шляхом навивання одногодвох, шарів вельми міцного тонкого дроту, що перевершує по міцності стрічку, поверх останнього її витка. В маховику, óбід якого виконано із дроту, усі витки також повинні бути скріпленні між собою будь-яким засобом, що не зменшує їх міцності. Звичайно витки з'єднуються між собою за допомогою клею, а останній виток прикріплено до несучого центру (котушки), наприклад зварюванням. Напрямок навивання гнучкого елемента обов'язково повинен співпадати з напрямком обертання маховика. Уникнути розшарування витків стрічки або дроту можливо також шляхом підкладання під внутрішні витки ободу баласту у вигляді масивних підкладок, наприклад сталевих чи свинцевих, що мають форму секторів, накладок чи тягарів. При обертанні маховика баласт притискає внутрішні витки до зовнішніх за рахунок відцентрованих сил і перешкоджає розшаруванню обода. Окрім того, можливо навантаження гнучкого елемента на несучий центр з натягом. В цьому випадку клей не застосовується, так як за рахунок натяга забезпечується щільна посадка витків один на другий. Цей натяг створюється, коли гнучкий сталевий елемент (стрічка або дріт) накручується в нагрітому стані, що при наступному охолодженні призводить до зменшення діаметра витків і отримання попередньо напруженого з'єднання. Запропонований привод працює слідуючим чином. Від едектричного двигуна 1 через з'єднувальну муфту 2 обертання передається маховику 5, розташованому на приймальному валу 3, та шестерні 6, яка знаходиться в зачепленні із зубчастим колесом 7, вільно встановленим на головному валу 9. При вмиканні муфти кривошипного преса відбувається з'єднання зубчастого колеса 7 з головним валом 9. Вал 9 обертається і через шатун 10 приводить до зворотно-поступального руху повзуна (на фіг. 1 умовмо повзун не зображено). При вимиканні мйфти відбувається від'єднання зубчастого колеса 7 від головного вала 9 і одночасне гальмування обертання вала та інших ведених деталей привода. Під час вистоювання повзуна в крайньому верхньому положенні і його холостого ходу униз електричний двигун 1 розганяє маховик 5, коли останній завдяки збільшенню швидко 2 30037 сті обертання накопичує значний запас кінетичної енергії. При робочому ході, коли опір деформованого металу різко зростає, швидкість обертання привода починає знижуватися. Інерція маховика 5 намагається підтримувати її постійною. При цьому маховик 5 віддає частину своєї кінетичної енергії і допомагає електричному двигун у 1 долати збільшений опір переміщенню повзуна униз. Після закінчення робочого ходу електричний двигун 1 знову розганяє маховик 5 до попередньої швидкості і відновлює запас його кінетичної енергії, який було віддано під час робочого ходу на виконання технологічної операції. Таким чином, корисна робота деформації металу виконується пресом не тільки за рахунок роботи електричного двигуна в цей період, але й за рахунок частини кінетичної енергії, накопиченої в маховику під час холостого ходу і відданої під час робочого ходу повзуна преса. Маховик згладжує піки навантаження, які виникають в мить штампування і сприймаються електродвигуном, що значно полегшує умови роботи останього. Нова конструкція маховика з ободом, накрученим із високоміцного гнучкого елемента, дає змогу збільшити кількість його обертів без порушення суцільності (цілісності). Це дозволяє встановити витий маховик на валу електричного двигуна і позбутися громіздкої клинопасової передачі. Більша кутова швидкість маховика забезпечує збільшення запасу кінетичної енергії, тобто підвищення енергоємкості привода, або при незмінній величині кінетичної енергії - зменшення радіальних розмірів маховика, тобто зниження матеріалоємкості конструкції. Кінематична енергія маховика для певного преса повинна бути однакова, незалежно від того на якому валу встановлено маховик: Wм = де І . і2 кл При роботі привода в ободі маховика виникають напруження розтягання, які пропорційні густині його матеріалу і квадрату колової швидкості по зовнішній поверхні. Колова швидкість витків маховика збільшується по мірі віддалення від осі обертання. Відповідно збільшуються і напруження розтягання в них, згідно формулі [4]: I1 = s = r × V 2 = r × w2 × R2 , де s - розтягувальні напруження в кожному витку маховика; r - густина металу, з якого навито обід маховика; \/ - колова швидкість кожного витка маховика; w - кутова швидкість кожного витка; R - радіус певного витка маховика. При навиванні обода маховика із високоміцного гнучкого елемента, площа поперечного перерізу якого пропорційна квадрату його відстані від осі обертання, вирівнюються питомі розтягувальні напруження у витках, а також величина їх деформацій, що запобігає розшаруванню обода. Максимально допустима кутова швидкість монолітного маховика у відомому приводі дорівнює w= 1 R [ s] , r де R - зовнішній радіус відомого монолітного маховика; [s] - доп устиме напруження на розтяг монолітного матеріалу. Максимально допустима кутова швидкість запропонованого маховика, обід якого навито із високоміцного гнучкого елемента, складає 2 I × w 2 I1 × w1 = , 2 2 w1 = І - момент інерції маховика, встановленого на приймальному валу відомої конструкції привода; w - кутова швидкість маховика, встановленого на приймальному валу; І1 - момент інерції маховика, встановленого на валу електричного двигуна, згідно запропонованій конструкції; w1 - к утова швидкість маховика, встановленого на валу електродвигуна. Звідси співвідношення моментів інерції маховиків, встановлених в запропонованому приводі і у відомому приводі, дорівнює 1 R1 [s ]1 , r де R1 - зовнішній радіус запропонованого витого маховика; [s]1 - допустиме напруження на розтяг високоміцного гнучкого елемента, із якого навито обід маховика. Співвідношення максимально допустимих кутових швидкостей витого і монолітного маховиків, виходячи із однакового запасу їх кінетичної енергії, запишеться у вигляді: w1 R [ s]1 = . w R1 [ s] Звідси радіус витого маховика, який встановлено в запропонованому приводі, знаходиться із слідуючого математичного виразу: I1 w 2 = 2, I w1 тобто моменти інерції маховиків зворотньо пропорційні квадратам кутових швидкостей валів, на яких вони встановлені. Але співвідношення w1/w являє собою передаточне число клинопасової передачі і кл, яку розміщено у відомому приводі між валом електродвигуна та приймальним валом. Тому момент інерції маховика в запровонованому приводі, обід якого навито із високоміцного гнучкого елемента (стрічки, дроту, волокна та інш.) знаходиться за виразом: R1 = R w w1 [ s]1 R = × K , [s ] iкл де w1 - передаточне число клинопасової пеw редачі, яка є у відомому приводі і не потрібна в запропонованому приводі завдяки встановленню махвика на валу електричного двигуна; i кл = 3 30037 [ s]1 - коефіцієнт, що характеризує співвід[s ] ношення міцнісних властивостей високоміцного гнучкого елемента та монолітного матеріалу. Наприклад, при модернізації привода кривошипного преса зусиллям 6,3 МН, який має монолітний маховик із сталі 45 з радіусом R=1000 мм, встановлений на приймальному валу, який зв'язано з електродвигуном клинопасовою передачею з передаточним числом і кл=3,4, зовнішній радіус запропонованого маховика, накрученого із гнучкої стрічки із сталі 45 і встановленого на валу електричного двигуна, буде складати чому ході повзуна кривошипного преса завдяки більшому перепаду кутової швидкості при відсутності клинопасової передачі; - зниження матеріалоємності за рахунок істотного зменшення радіальних розмірів маховика; - зменшення габаритних розмірів привода внаслідок ліквідації клинопасової передачі. Це також підвищув ККД привода, виключає електризацію пасів та їх заміну після зношення; - безпечність при розриванні маховика, який гальмується завдяки тертю зруйнованого зовнішнього витка гнучкого елемента по стінкам кожуха (огородження маховика); - зниження втрат на ремонт маховика у випадку розриву зовнішнього його витка, який достатньо приклеїти або прикріпити до обода за допомогою зварювання. Запропонована у формулі сполука основних ознак забезпечує якісно нову конструкцію привода кривошипного преса, яка є недосяжною при традиційному рішенні. Конструкція привода не є очевидною для спеціалістів і вносить нові можливості в процес проектування нових кривошипних пресів. Перелічені відмінні суттєві ознаки характеризують новизну запропонованого технічного рішення і забезпечує позитивний ефект у вигляді збільшення енергоємності, зменшення габаритних розмірів та матеріалоємності привода, а також підвищення безпеки роботи. Запропонований привод може знайти широке використання в ковальлсько-штампувальному обладнанні для приведення в рух кривошипних пресів та кривошипних машин, наприклад горизонтально-кувальних (ГКМ) чи горизонтально-згинальних (ГЗМ). Джерела інформації 1. Кузнечно-штамповочное оборудование / А.Н. Банкетов, Ю.А. Бочаров, Н.С. Добринский и др. / Под ред. А.Н. Банкетова и Е.Н. Ланского. - 2-е изд. - М.: Ма шиностроение, 1982. - Стр. 125. 2. Романовский В.П. Справочник по холодной штамповке. - 5-е изд.- М.: Машиностроение, 1971. - Стр. 653, рис. 558. 3. Ровинский Г.Н., Злотников С.Л. Листоштамповочные механические прессы. – М.: Машиностроение, 1968. - Стр. 239. 4. Тимошенко С.П. Сопротивление материалов. Часть 1. - 3-е изд., перевод с английского. Л.-М.: ОНТИ, 1934. - Стр. 35. K= R [s ]1 1000 700 = × = 324 мм . iкл [ s] 3,4 580 Таким чином, в запропонованому приводі радіус витого маховика більш, ніж в 3 рази менший радіуса монолітного маковика у відомому приводі при однаковому запасі кінетичної енергії При роботі привода в ободі витого маховика 5 виникають напруження розтягання і пов'язані з цим деформації. Чим далі від центру розташовано виток гнучкого елементу, тим дужче його напружено. Отже, першим розірватися може саме цей зовнішній виток. До того ж його ослаблено кріпленням до передостанього витка склеюванням, зварюванням та інш. У випадку перевищення допустимої колової швидкості маховика останній виток розривається і вступає в активне тертя iз захисним кожухом (на кресленнях умовно не зображено). Цей останній виток є своєрідним запобіжником і він розривається сам, але уберігає від розриву весь маховик. Це відноситься до випадку обертання маховика в напрямку навивання гнутого елемента; при протилежному напрямку обертання маховик може розірватися цілком. При розриві зовнішнього витка він вступає в активне тертя з кожухом, гальмує маховик і створює значний шум. Штампувальник по характерному шуму може зробити висновок про аварію, що відбулася, і вимкнути привод преса. Для відновлення роботоздатності маховика достатньо розірваний гнучкий елемент (стрічку, дріт або волокно) приклеїти чи приварити до основного обода. Використання запропонованого привода забезпечує слідуючі переваги: - підвищення енергоємності і більш значне віддавання кінетичної енергії маховиком при робоR1 = 4 30037 Фіг. 1 Фіг. 2 5 30037 Фіг. 3 __________________________________________________________ ДП "Український інститут промислової власності" (Укрпатент) Україна, 01133, Київ-133, бульв. Лесі Українки, 26 (044) 295-81-42, 295-61-97 __________________________________________________________ Підписано до друку ________ 2002 р. Формат 60х84 1/8. Обсяг ______ обл.-вид. арк. Тираж 35 прим. Зам._______ ____________________________________________________________ УкрІНТЕІ, 03680, Київ-39 МСП, вул. Горького, 180. (044) 268-25-22 ___________________________________________________________ 6
ДивитисяДодаткова інформація
Назва патенту англійськоюDrive of crank press
Автори англійськоюZaporozhchenko Vitalii Serhiiovych
Назва патенту російськоюПривод кривошипного пресса
Автори російськоюЗапорожченко Виталий Сергеевич
МПК / Мітки
МПК: B30B 15/00
Мітки: привод, преса, кривошипного
Код посилання
<a href="https://ua.patents.su/6-30037-privod-krivoshipnogo-presa.html" target="_blank" rel="follow" title="База патентів України">Привод кривошипного преса</a>
Велосипедний важільний привод – ввп
Номер патенту: 396
Опубліковано: 30.08.1999
Автор: Мельничук Святослав Сафронович
МПК: B62M 1/00
Мітки: велосипедний, привод, важільний, ввп
Формула / Реферат:
Велосипедний важільний привод, що містить вал, який обертається на підшипниках в ступиці педального вузла вело-рами, на якому жорстко закріплена ведуча зірка, яка отримує від педалей оберти, що передаються через ланцюг на ведену зірку колеса, який відрізняється тим, що прикладена фізична сила до важелів, що з'єднані за допомогою силових плоских стрічок з барабанами, змушує важелі повернутись на 60-90° і одночасно тягнути стрічку, що намотана...
Привод для високовольтного роз’єднувача контактної мережі електрифікованих залізниць
Номер патенту: 414
Опубліковано: 11.10.1999
Автори: Пашко Сергій Якович, Корнеєнков Віктор Миколайович, Єгоров Леонід Васильович
МПК: H01H 31/00, H01H 33/28, F04B 17/03
Мітки: високовольтного, залізниць, роз'єднувача, електрифікованих, привод, контактної, мережі
Формула / Реферат:
1. Привод для високовольтного роз'єднувача контактної мережі електрифікованих залізниць, що має головний вал, двигун, механізм роз'єднання головного вала від двигуна, комутаційну апаратуру, який відрізняється тим, що привод обладнаний кривошипно-важільним механізмом та механізмом регулювання кута повороту головного вала, а як двигун застосовано хвильовий мотор-редуктор, на валу якого встановлена запобіжна муфта.2. Привод за п. 1,...
Привод жниварки для збирання кукурудзи

Номер патенту: 2205
Опубліковано: 26.12.1994
Автори: Заблоцький Борис Михайлович, Кучеренко Григорій Федорович, Картель Іван Іванович, Синякевич Володимир Макарович
МПК: A01D 45/02, A01D 69/00
Мітки: привод, кукурудзи, жниварки, збирання
Формула / Реферат:
Привод жатки для уборки кукурузы, содержащий контрпривод, смонтированный на раме жатки посредством лап редуктор привода вала транспортера и гладкого вальца, а также привод возвратно-поступательного движения режущего аппарата, отличающийся тем, что, с целью повышения КПД и снижения металлоемкости, привод режущего аппарата смонтирован на приводном валу редуктора привода вала транспортера и гладкого вальца, при этом лапы крепления редуктора...
Комбінований привод
Номер патенту: 168
Опубліковано: 30.04.1993
Автори: Хлібопрос Дмитро Беніамінович, Кармугін Борис Володимирович, Копаниця Володимир Васильович
МПК: F16K 31/02
Мітки: привод, комбінований
Формула / Реферат:
Формула изобретения1, Комбинированный привод, содержащий корпус с редуктором, ручной привод с маховиком, электродвигатель, связанный с ведомым валом посредством муфт сцепления, включающих в себя ведущие и ведомые полумуфты, механизм переключения в виде связанного с одной из полумуфт каждой муфты штока, размещенного с возможностью перемещения в отверстии ведомого вала , отличающийся тем, что, с целью упрощения конструкции, шток...
Компенсатор похибок неперпендикулярності осі отвору у повзуні преса
Номер патенту: 537
Опубліковано: 15.09.2000
Автори: Засоба Іван Олександрович, Діамантопуло Костянтин Костянтинович
МПК: B21D 37/00
Мітки: компенсатор, похибок, повзуні, отвору, преса, осі, неперпендикулярності
Формула / Реферат:
1. Компенсатор похибок неперпендикулярності осі отвору у повзуні преса, що містить притискувальний кільцевий фланець і хвостовик, який відрізняється тим, що контактна поверхня хвостовика обладнана заздалегідь напруженим пружним елементом.2. Компенсатор по п. 1, який відрізняється тим, що пружний елемент виконано у вигляді поліуретанової пластини.3. Компенсатор по п. 1 або 2, який відрізняється тим, що ...
Попередній патент: Спосіб діагностики пенетрації гастродуоденальної виразки
Наступний патент: Спосіб вимірювання загальної ємкості легенів
Випадковий патент: Склад смузі "авокадо"