Пристрій для зважування в умовах динамічних перешкод
Формула / Реферат
Пристрій для зважування в умовах динамічних перешкод, що містить вантажоприймальний вузол, встановлений на основному силовимірювальному тензодатчику, нерухомо встановленому на жорсткій основі, додатковий силовимірювальний тензодатчик з еталонним вантажем, який відрізняється тим, що додатковий силовимірювальний тензодатчик з еталонним вантажем нерухомо горизонтально розміщений у порожнині основи таким чином, що точка прикладання навантаження знаходиться на одній вертикалі з точкою прикладання навантаження на основний силовимірювальний тензодатчик, при цьому виходи основного силовимірювального тензодатчика і додаткового силовимірювального тензодатчика підключені кожний до свого блока аналого-частотного перетворювача, виходи якого підключені до входу центрального процесора, вихід якого підключений до блока індикації.
Текст
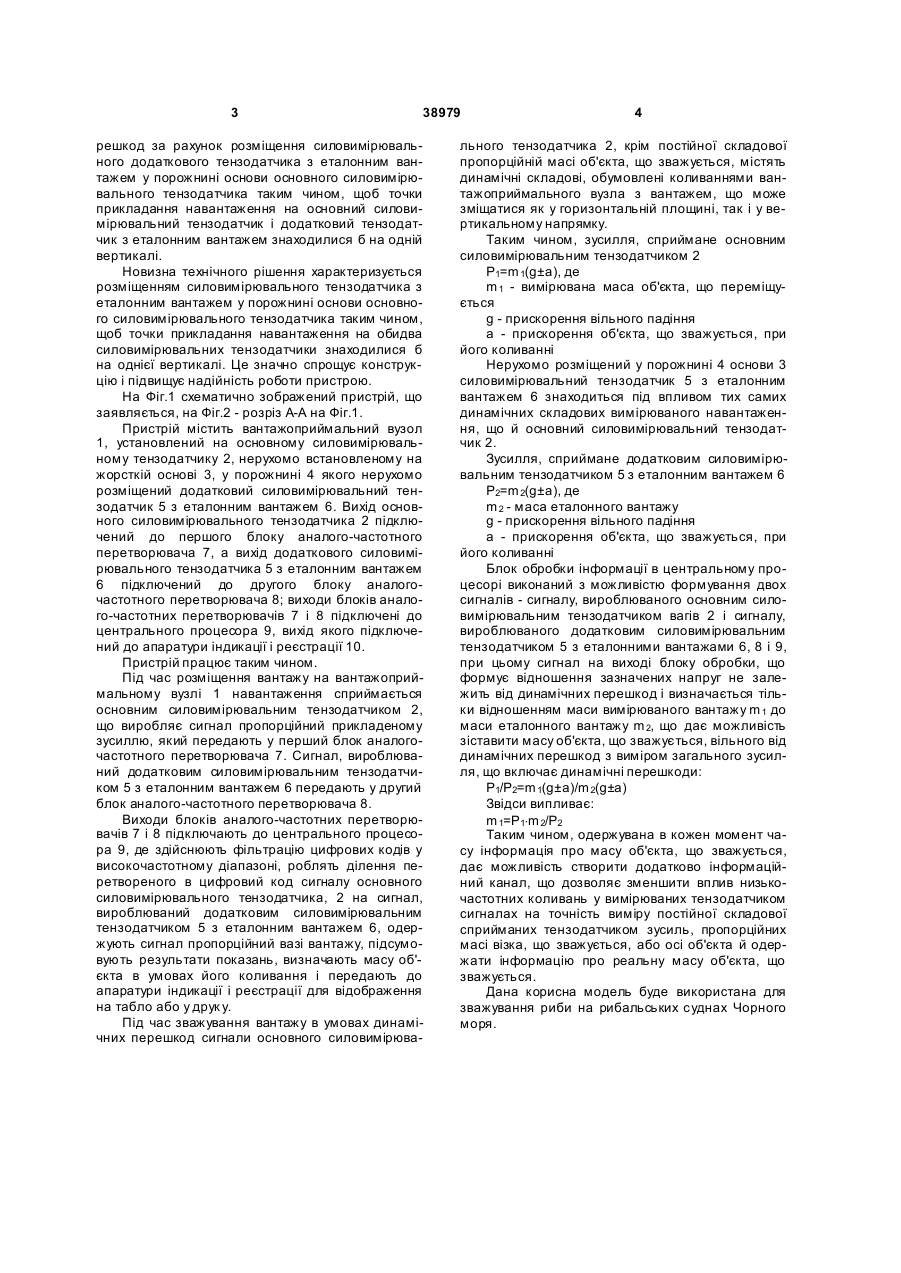
Пристрій для зважування в умовах динамічних перешкод, що містить вантажоприймальний вузол, встановлений на основному силовимірювальному тензодатчику, нерухомо встановленому на жорсткій основі, додатковий силовимірювальний тензодатчик з еталонним вантажем, який відрізняється тим, що додатковий силовимірювальний тензодат 3 38979 решкод за рахунок розміщення силовимірювального додаткового тензодатчика з еталонним вантажем у порожнині основи основного силовимірювального тензодатчика таким чином, щоб точки прикладання навантаження на основний силовимірювальний тензодатчик і додатковий тензодатчик з еталонним вантажем знаходилися б на одній вертикалі. Новизна технічного рішення характеризується розміщенням силовимірювального тензодатчика з еталонним вантажем у порожнині основи основного силовимірювального тензодатчика таким чином, щоб точки прикладання навантаження на обидва силовимірювальних тензодатчики знаходилися б на однієї вертикалі. Це значно спрощує конструкцію і підвищує надійність роботи пристрою. На Фіг.1 схематично зображений пристрій, що заявляється, на Фіг.2 - розріз А-А на Фіг.1. Пристрій містить вантажоприймальний вузол 1, установлений на основному силовимірювальному тензодатчику 2, нерухомо встановленому на жорсткій основі 3, у порожнині 4 якого нерухомо розміщений додатковий силовимірювальний тензодатчик 5 з еталонним вантажем 6. Вихід основного силовимірювального тензодатчика 2 підключений до першого блоку аналого-частотного перетворювача 7, а вихід додаткового силовимірювального тензодатчика 5 з еталонним вантажем 6 підключений до другого блоку аналогочастотного перетворювача 8; виходи блоків аналого-частотних перетворювачів 7 і 8 підключені до центрального процесора 9, вихід якого підключений до апаратури індикації і реєстрації 10. Пристрій працює таким чином. Під час розміщення вантажу на вантажоприймальному вузлі 1 навантаження сприймається основним силовимірювальним тензодатчиком 2, що виробляє сигнал пропорційний прикладеному зусиллю, який передають у перший блок аналогочастотного перетворювача 7. Сигнал, вироблюваний додатковим силовимірювальним тензодатчиком 5 з еталонним вантажем 6 передають у другий блок аналого-частотного перетворювача 8. Виходи блоків аналого-частотних перетворювачів 7 і 8 підключають до центрального процесора 9, де здійснюють фільтрацію цифрових кодів у високочастотному діапазоні, роблять ділення перетвореного в цифровий код сигналу основного силовимірювального тензодатчика, 2 на сигнал, вироблюваний додатковим силовимірювальним тензодатчиком 5 з еталонним вантажем 6, одержують сигнал пропорційний вазі вантажу, підсумовують результати показань, визначають масу об'єкта в умовах його коливання і передають до апаратури індикації і реєстрації для відображення на табло або у друк у. Під час зважування вантажу в умовах динамічних перешкод сигнали основного силовимірюва 4 льного тензодатчика 2, крім постійної складової пропорційній масі об'єкта, що зважується, містять динамічні складові, обумовлені коливаннями вантажоприймального вузла з вантажем, що може зміщатися як у горизонтальній площині, так і у вертикальному напрямку. Таким чином, зусилля, сприймане основним силовимірювальним тензодатчиком 2 Р1=m 1(g±а), де m 1 - вимірювана маса об'єкта, що переміщується g - прискорення вільного падіння а - прискорення об'єкта, що зважується, при його коливанні Нерухомо розміщений у порожнині 4 основи 3 силовимірювальний тензодатчик 5 з еталонним вантажем 6 знаходиться під впливом тих самих динамічних складових вимірюваного навантаження, що й основний силовимірювальний тензодатчик 2. Зусилля, сприймане додатковим силовимірювальним тензодатчиком 5 з еталонним вантажем 6 Р2=m 2(g±а), де m 2 - маса еталонного вантажу g - прискорення вільного падіння а - прискорення об'єкта, що зважується, при його коливанні Блок обробки інформації в центральному процесорі виконаний з можливістю формування двох сигналів - сигналу, вироблюваного основним силовимірювальним тензодатчиком вагів 2 і сигналу, вироблюваного додатковим силовимірювальним тензодатчиком 5 з еталонними вантажами 6, 8 і 9, при цьому сигнал на виході блоку обробки, що формує відношення зазначених напруг не залежить від динамічних перешкод і визначається тільки відношенням маси вимірюваного вантажу m 1 до маси еталонного вантажу m 2, що дає можливість зіставити масу об'єкта, що зважується, вільного від динамічних перешкод з виміром загального зусилля, що включає динамічні перешкоди: Р1/Р2=m 1(g±а)/m 2(g±а) Звідси випливає: m 1=P1×m 2/Р2 Таким чином, одержувана в кожен момент часу інформація про масу об'єкта, що зважується, дає можливість створити додатково інформаційний канал, що дозволяє зменшити вплив низькочастотних коливань у вимірюваних тензодатчиком сигналах на точність виміру постійної складової сприйманих тензодатчиком зусиль, пропорційних масі візка, що зважується, або осі об'єкта й одержати інформацію про реальну масу об'єкта, що зважується. Дана корисна модель буде використана для зважування риби на рибальських суднах Чорного моря. 5 Комп’ютерна в ерстка М. Ломалова 38979 6 Підписне Тираж 28 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for weighing under conditions of dynamical noise
Автори англійськоюKalinin Oleksandr Ivanovych
Назва патенту російськоюУстройство для взвешивания в условиях динамических преград
Автори російськоюКалинин Александр Иванович
МПК / Мітки
МПК: G01G 19/00
Мітки: пристрій, зважування, умовах, перешкод, динамічних
Код посилання
<a href="https://ua.patents.su/3-38979-pristrijj-dlya-zvazhuvannya-v-umovakh-dinamichnikh-pereshkod.html" target="_blank" rel="follow" title="База патентів України">Пристрій для зважування в умовах динамічних перешкод</a>
Пристрій для зважування в умовах коливань вантажу

Номер патенту: 72094
Опубліковано: 17.01.2005
Автори: Калінін Олександр Іванович, Калінін Олександр Олександрович
МПК: G01G 19/00
Мітки: зважування, умовах, вантажу, коливань, пристрій
Формула / Реферат:
Пристрій для зважування в умовах коливань вантажу, що містить вантажоприймальний вузол, встановлений на основному силовимірювальному тензодатчику, нерухомо встановленому на жорсткій основі, додатковий силовимірювальний тензодатчик з еталонним вантажем, який відрізняється тим, що додатковий силовимірювальний тензодатчик з еталонним вантажем нерухомо горизонтально розміщений у порожнині основи таким чином, що точка прикладання навантаження...
Пристрій для зважування на кранах у динамічних умовах
Номер патенту: 18201
Опубліковано: 15.11.2006
Автори: Черепащук Григорій Олександрович, Потильчак Олексій Петрович
МПК: G01G 9/00
Мітки: пристрій, умовах, динамічних, зважування, кранах
Формула / Реферат:
Пристрій для зважування на кранах у динамічних умовах, що являє собою тензорезисторний перетворювач сили, підсилювач, блок обчислення та індикатор, який відрізняється тим, що до входу підсилювача, котрий виконаний багатоканальним, підключено два мікромеханічні акселерометри, перший з яких орієнтований у вертикальній площині, зв'язаної з пристроєм системи координат, другий - у горизонтальній площині, зв'язаної з пристроєм системи координат,...
Пристрій для зважування

Номер патенту: 84090
Опубліковано: 10.09.2008
Автори: Богдан Кім Степанович, Санкін Анатолій Олексійович
МПК: G01G 19/00
Мітки: зважування, пристрій
Формула / Реферат:
Пристрій для зважування, до складу якого входять пружно підвішена платформа, нерівноплечий зрівноважений важіль, установлений на нерухомій основі і з'єднаний з платформою в її центрі жорсткості за допомогою кульового шарніра, силопередавальний елемент, силовимірювальний датчик та електрично з'єднаний з ним мікропроцесорний блок вимірювання та індикації маси, який відрізняється тим, що передавальний елемент виконано у вигляді двох постійних...
Спосіб зважування рухомих об’єктів
Номер патенту: 68137
Опубліковано: 15.07.2004
Автори: Калінін Олександр Іванович, Калінін Олександр Олександрович
МПК: G01G 19/02, G01G 19/04
Мітки: зважування, спосіб, рухомих, об'єктів
Формула / Реферат:
Спосіб зважування рухомих об'єктів, що включає установлення на залізничній колії вантажоприймальної платформи ваг, яка передає навантаження від об'єкта, що зважується, на тензодатчики ваг, перетворення вихідних сигналів тензодатчиків у цифрові коди з виділенням постійної складової зусиль, сприйманих тензодатчиками, обробку цифрових кодів і їхню фільтрацію, підсумовування результатів обробки, який відрізняється тим, що на вантажоприймальній...
Низькопрофільні ваги для зважування залізничного транспорту
Номер патенту: 63031
Опубліковано: 15.01.2004
Автори: Докаленко Сергій Анатолійович, Капітельман Леонід Вільямович, Нікітінський Михайло Павлович
МПК: B60S 5/00, G01G 19/00
Мітки: зважування, низькопрофільні, залізничного, транспорту, ваги
Формула / Реферат:
1. Низькопрофільні ваги для зважування залізничного транспорту, які містять вантажоприймальну платформу, пристрій силовведення, встановлені на фундаменті силовимірювальні модулі з тензодатчиками, які відрізняються тим, що силовимірювальні модулі з тензодатчиками розташовані перед стиками рейок під'їзного шляху з рейками вантажоприймальної платформи та вписані по висоті у кінцеві опорні частини подовжніх балок вантажоприймальної платформи,...
Наступний патент: Спосіб місцевого лікування рожевих вугрів
Випадковий патент: Пестицидні композиції мезорозмірних частинок з підсиленою дією