Спосіб зважування рухомих об’єктів
Номер патенту: 68137
Опубліковано: 15.07.2004
Автори: Калінін Олександр Олександрович, Калінін Олександр Іванович
Формула / Реферат
Спосіб зважування рухомих об'єктів, що включає установлення на залізничній колії вантажоприймальної платформи ваг, яка передає навантаження від об'єкта, що зважується, на тензодатчики ваг, перетворення вихідних сигналів тензодатчиків у цифрові коди з виділенням постійної складової зусиль, сприйманих тензодатчиками, обробку цифрових кодів і їхню фільтрацію, підсумовування результатів обробки, який відрізняється тим, що на вантажоприймальній платформі ваг установлюють додаткові тензодатчики, навантажують їх еталонними вантажами, при переміщенні об'єкта передають одночасно вихідні сигнали тензодатчиків ваг і додаткових тензодатчиків з еталонними вантажами відповідно в перший і другий блоки аналого-частотних перетворювачів, перетворюють їх у цифрові коди, передають у центральний процесор, здійснюють фільтрацію цифрових кодів у високочастотному діапазоні, здійснюють ділення перетворених у цифрові коди сигналів тензодатчиків ваг на сигнали додаткових тензодатчиків з еталонними вантажами, визначають відношення, відповідне результатам зважування, підсумовують результати показань, визначають масу рухомого об'єкта і передають у пристрій індикації та реєстрації інформацію для відображення на табло або друкування.
Текст
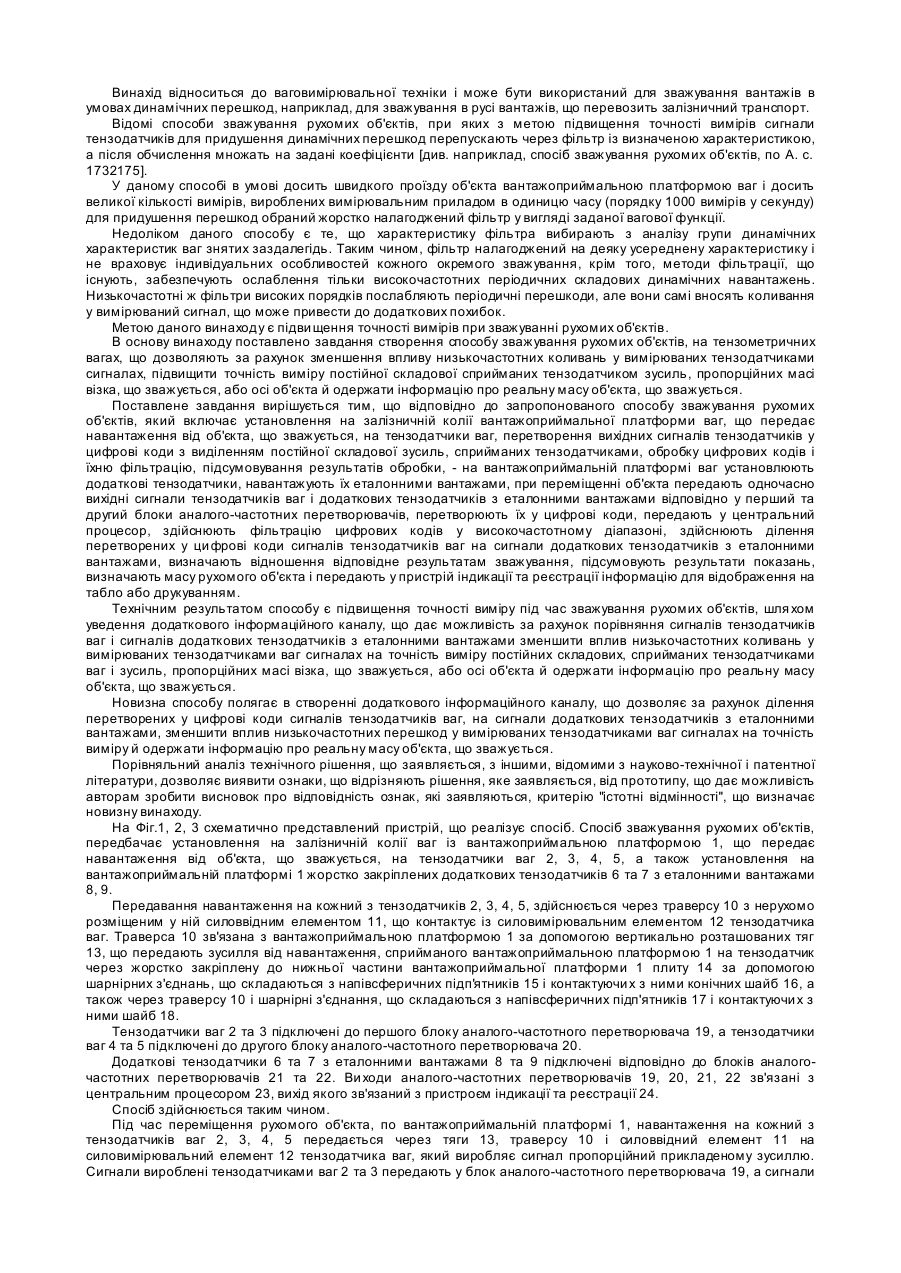
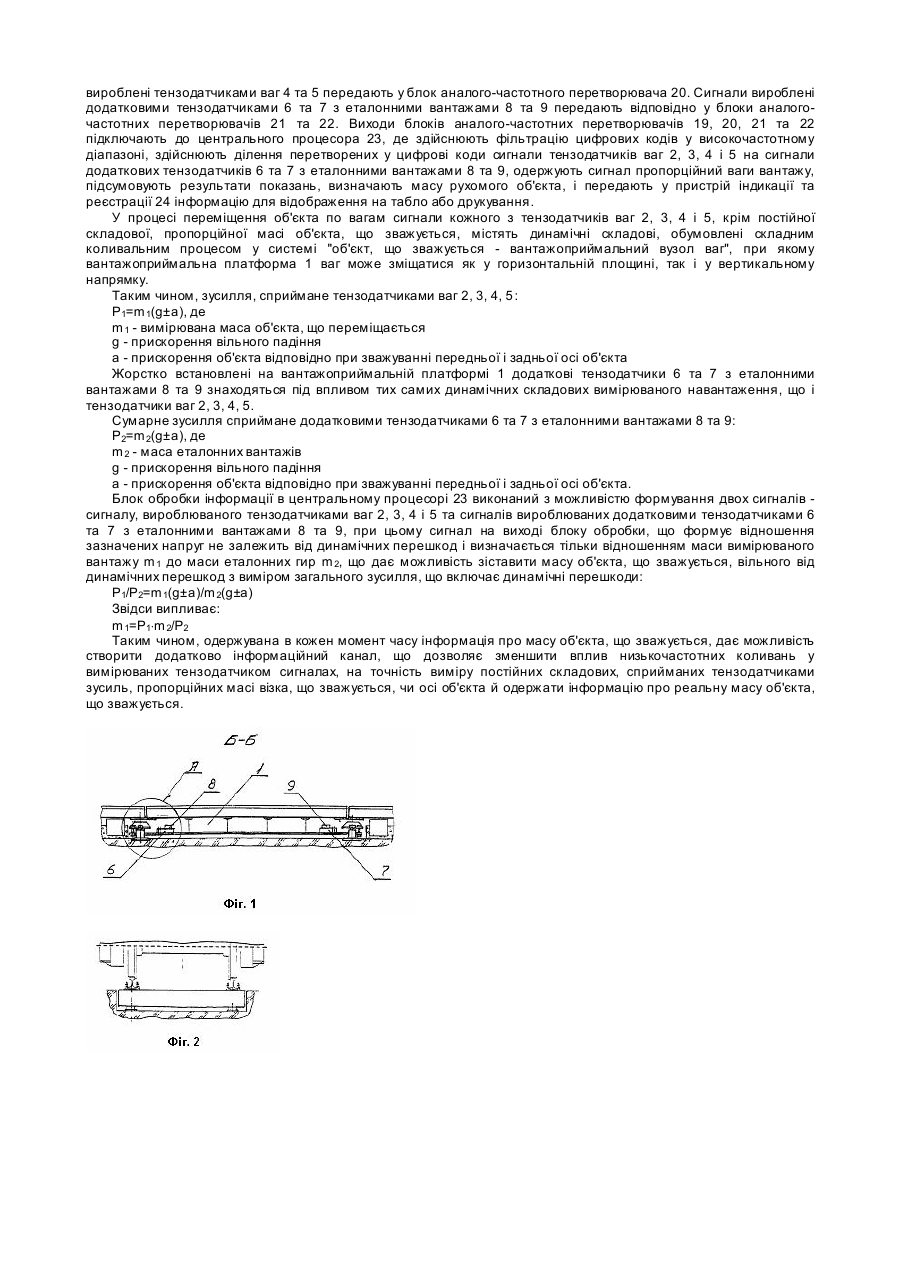
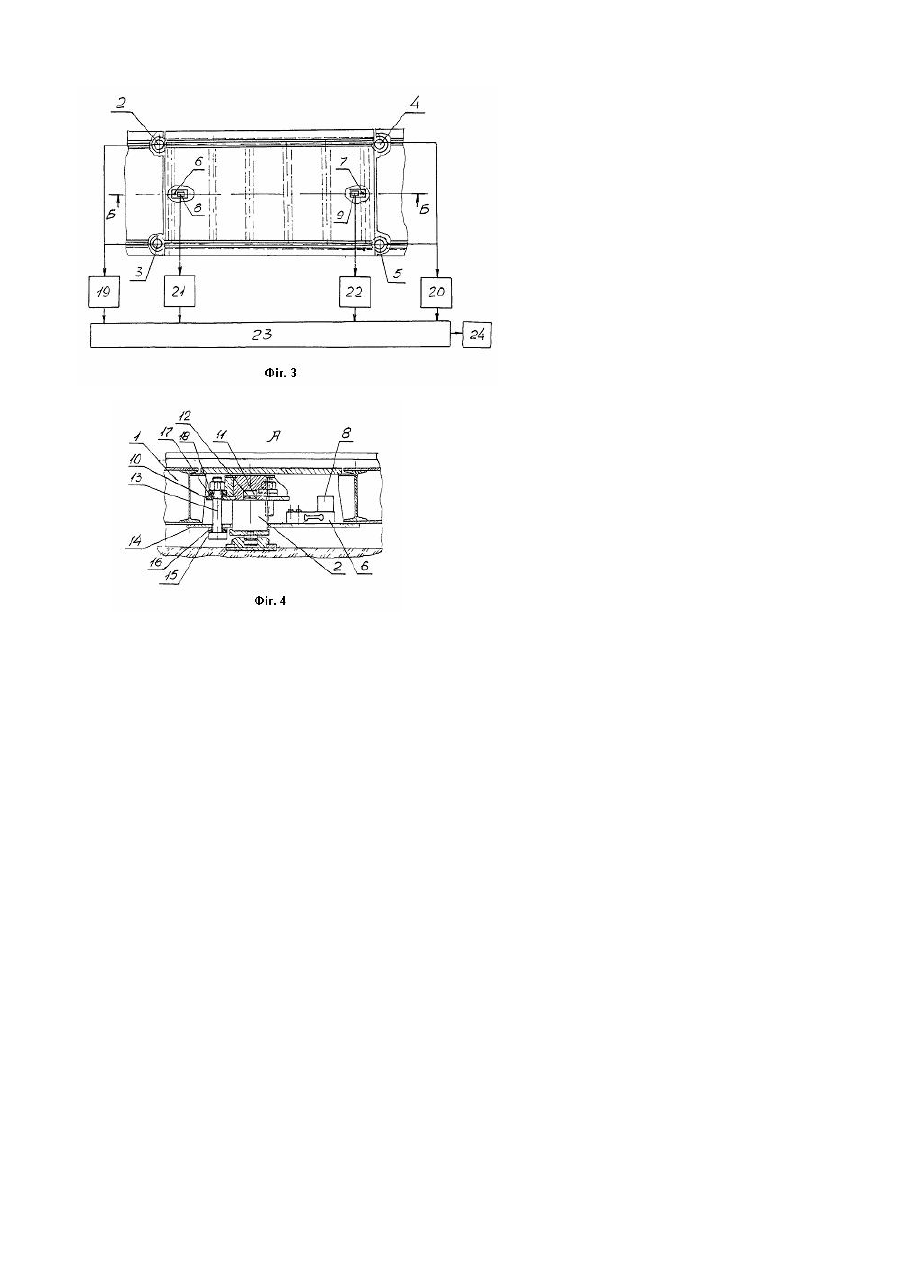
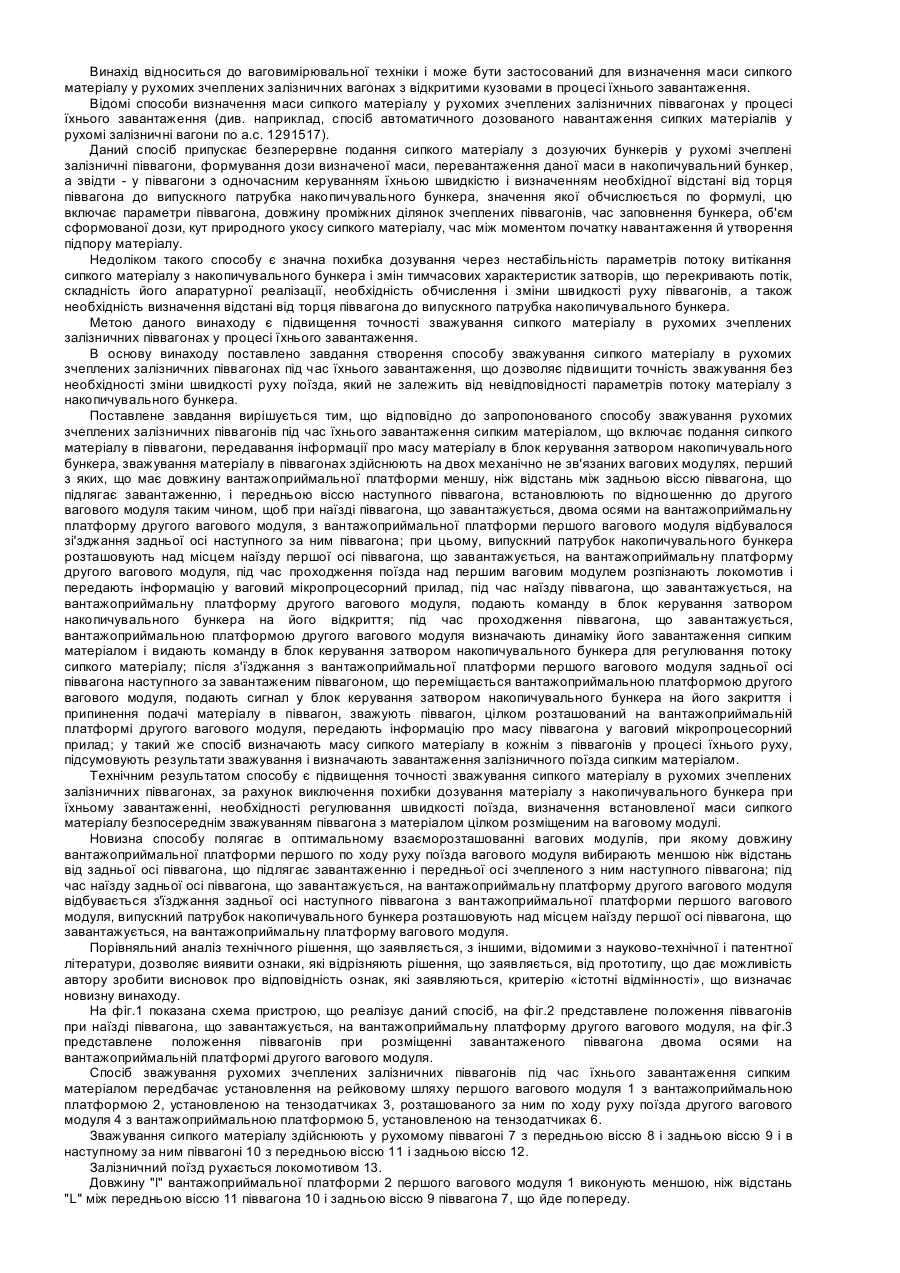
Винахід відноситься до ваговимірювальної техніки і може бути використаний для зважування вантажів в умовах динамічних перешкод, наприклад, для зважування в русі вантажів, що перевозить залізничний транспорт. Відомі способи зважування рухомих об'єктів, при яких з метою підвищення точності вимірів сигнали тензодатчиків для придушення динамічних перешкод перепускають через фільтр із визначеною характеристикою, а після обчислення множать на задані коефіцієнти [див. наприклад, спосіб зважування рухомих об'єктів, по A. с. 1732175]. У даному способі в умові досить швидкого проїзду об'єкта вантажоприймальною платформою ваг і досить великої кількості вимірів, вироблених вимірювальним приладом в одиницю часу (порядку 1000 вимірів у секунду) для придушення перешкод обраний жорстко налагоджений фільтр у вигляді заданої вагової функції. Недоліком даного способу є те, що характеристику фільтра вибирають з аналізу групи динамічних характеристик ваг знятих заздалегідь. Таким чином, фільтр налагоджений на деяку усереднену характеристику і не враховує індивідуальних особливостей кожного окремого зважування, крім того, методи фільтрації, що існують, забезпечують ослаблення тільки високочастотних періодичних складових динамічних навантажень. Низькочастотні ж фільтри високих порядків послабляють періодичні перешкоди, але вони самі вносять коливання у вимірюваний сигнал, що може привести до додаткових похибок. Метою даного винаходу є підви щення точності вимірів при зважуванні рухомих об'єктів. В основу винаходу поставлено завдання створення способу зважування рухомих об'єктів, на тензометричних вагах, що дозволяють за рахунок зменшення впливу низькочастотних коливань у вимірюваних тензодатчиками сигналах, підвищити точність виміру постійної складової сприйманих тензодатчиком зусиль, пропорційних масі візка, що зважується, або осі об'єкта й одержати інформацію про реальну масу об'єкта, що зважується. Поставлене завдання вирішується тим, що відповідно до запропонованого способу зважування рухомих об'єктів, який включає установлення на залізничній колії вантажоприймальної платформи ваг, що передає навантаження від об'єкта, що зважується, на тензодатчики ваг, перетворення вихідних сигналів тензодатчиків у цифрові коди з виділенням постійної складової зусиль, сприйманих тензодатчиками, обробку цифрових кодів і їхню фільтрацію, підсумовування результатів обробки, - на вантажоприймальній платформі ваг установлюють додаткові тензодатчики, навантажують їх еталонними вантажами, при переміщенні об'єкта передають одночасно вихідні сигнали тензодатчиків ваг і додаткових тензодатчиків з еталонними вантажами відповідно у перший та другий блоки аналого-частотних перетворювачів, перетворюють їх у цифрові коди, передають у центральний процесор, здійснюють фільтрацію цифрових кодів у високочастотному діапазоні, здійснюють ділення перетворених у ци фрові коди сигналів тензодатчиків ваг на сигнали додаткових тензодатчиків з еталонними вантажами, визначають відношення відповідне результатам зважування, підсумовують результати показань, визначають масу рухомого об'єкта і передають у пристрій індикації та реєстрації інформацію для відображення на табло або друкуванням. Технічним результатом способу є підвищення точності виміру під час зважування рухомих об'єктів, шля хом уведення додаткового інформаційного каналу, що дає можливість за рахунок порівняння сигналів тензодатчиків ваг і сигналів додаткових тензодатчиків з еталонними вантажами зменшити вплив низькочастотних коливань у вимірюваних тензодатчиками ваг сигналах на точність виміру постійних складових, сприйманих тензодатчиками ваг і зусиль, пропорційних масі візка, що зважується, або осі об'єкта й одержати інформацію про реальну масу об'єкта, що зважується. Новизна способу полягає в створенні додаткового інформаційного каналу, що дозволяє за рахунок ділення перетворених у цифрові коди сигналів тензодатчиків ваг, на сигнали додаткових тензодатчиків з еталонними вантажами, зменшити вплив низькочастотних перешкод у вимірюваних тензодатчиками ваг сигналах на точність виміру й одержати інформацію про реальну масу об'єкта, що зважується. Порівняльний аналіз технічного рішення, що заявляється, з іншими, відомими з науково-технічної і патентної літератури, дозволяє виявити ознаки, що відрізняють рішення, яке заявляється, від прототипу, що дає можливість авторам зробити висновок про відповідність ознак, які заявляються, критерію "істотні відмінності", що визначає новизну винаходу. На Фіг.1, 2, 3 схематично представлений пристрій, що реалізує спосіб. Спосіб зважування рухомих об'єктів, передбачає установлення на залізничній колії ваг із вантажоприймальною платформою 1, що передає навантаження від об'єкта, що зважується, на тензодатчики ваг 2, 3, 4, 5, а також установлення на вантажоприймальній платформі 1 жорстко закріплених додаткових тензодатчиків 6 та 7 з еталонними вантажами 8, 9. Передавання навантаження на кожний з тензодатчиків 2, 3, 4, 5, здійснюється через траверсу 10 з нерухомо розміщеним у ній силоввідним елементом 11, що контактує із силовимірювальним елементом 12 тензодатчика ваг. Траверса 10 зв'язана з вантажоприймальною платформою 1 за допомогою вертикально розташованих тяг 13, що передають зусилля від навантаження, сприйманого вантажоприймальною платформою 1 на тензодатчик через жорстко закріплену до нижньої частини вантажоприймальної платформи 1 плиту 14 за допомогою шарнірних з'єднань, що складаються з напівсферичних підп'ятників 15 і контактуючи х з ними конічних шайб 16, а також через траверсу 10 і шарнірні з'єднання, що складаються з напівсферичних підп'ятників 17 і контактуючи х з ними шайб 18. Тензодатчики ваг 2 та 3 підключені до першого блоку аналого-частотного перетворювача 19, а тензодатчики ваг 4 та 5 підключені до другого блоку аналого-частотного перетворювача 20. Додаткові тензодатчики 6 та 7 з еталонними вантажами 8 та 9 підключені відповідно до блоків аналогочастотних перетворювачів 21 та 22. Ви ходи аналого-частотних перетворювачів 19, 20, 21, 22 зв'язані з центральним процесором 23, вихід якого зв'язаний з пристроєм індикації та реєстрації 24. Спосіб здійснюється таким чином. Під час переміщення рухомого об'єкта, по вантажоприймальній платформі 1, навантаження на кожний з тензодатчиків ваг 2, 3, 4, 5 передається через тяги 13, траверсу 10 і силоввідний елемент 11 на силовимірювальний елемент 12 тензодатчика ваг, який виробляє сигнал пропорційний прикладеному зусиллю. Сигнали вироблені тензодатчиками ваг 2 та 3 передають у блок аналого-частотного перетворювача 19, а сигнали вироблені тензодатчиками ваг 4 та 5 передають у блок аналого-частотного перетворювача 20. Сигнали вироблені додатковими тензодатчиками 6 та 7 з еталонними вантажами 8 та 9 передають відповідно у блоки аналогочастотних перетворювачів 21 та 22. Виходи блоків аналого-частотних перетворювачів 19, 20, 21 та 22 підключають до центрального процесора 23, де здійснюють фільтрацію цифрових кодів у високочастотному діапазоні, здійснюють ділення перетворених у цифрові коди сигнали тензодатчиків ваг 2, 3, 4 і 5 на сигнали додаткових тензодатчиків 6 та 7 з еталонними вантажами 8 та 9, одержують сигнал пропорційний ваги вантажу, підсумовують результати показань, визначають масу рухомого об'єкта, і передають у пристрій індикації та реєстрації 24 інформацію для відображення на табло або друкування. У процесі переміщення об'єкта по вагам сигнали кожного з тензодатчиків ваг 2, 3, 4 і 5, крім постійної складової, пропорційної масі об'єкта, що зважується, містять динамічні складові, обумовлені складним коливальним процесом у системі "об'єкт, що зважується - вантажоприймальний вузол ваг", при якому вантажоприймальна платформа 1 ваг може зміщатися як у горизонтальній площині, так і у вертикальному напрямку. Таким чином, зусилля, сприймане тензодатчиками ваг 2, 3, 4, 5 : P1=m 1(g±a), де m 1 - вимірювана маса об'єкта, що переміщається g - прискорення вільного падіння а - прискорення об'єкта відповідно при зважуванні передньої і задньої осі об'єкта Жорстко встановлені на вантажоприймальній платформі 1 додаткові тензодатчики 6 та 7 з еталонними вантажами 8 та 9 знаходяться під впливом тих самих динамічних складових вимірюваного навантаження, що і тензодатчики ваг 2, 3, 4, 5. Сумарне зусилля сприймане додатковими тензодатчиками 6 та 7 з еталонними вантажами 8 та 9: Р2=m 2(g±а), де m 2 - маса еталонних вантажів g - прискорення вільного падіння а - прискорення об'єкта відповідно при зважуванні передньої і задньої осі об'єкта. Блок обробки інформації в центральному процесорі 23 виконаний з можливістю формування двох сигналів сигналу, вироблюваного тензодатчиками ваг 2, 3, 4 і 5 та сигналів вироблюваних додатковими тензодатчиками 6 та 7 з еталонними вантажами 8 та 9, при цьому сигнал на виході блоку обробки, що формує відношення зазначених напруг не залежить від динамічних перешкод і визначається тільки відношенням маси вимірюваного вантажу m 1 до маси еталонних гир m 2, що дає можливість зіставити масу об'єкта, що зважується, вільного від динамічних перешкод з виміром загального зусилля, що включає динамічні перешкоди: P1/P2=m 1(g±a)/m 2(g±a) Звідси випливає: m 1=Р1×m 2/P2 Таким чином, одержувана в кожен момент часу інформація про масу об'єкта, що зважується, дає можливість створити додатково інформаційний канал, що дозволяє зменшити вплив низькочастотних коливань у вимірюваних тензодатчиком сигналах, на точність виміру постійних складових, сприйманих тензодатчиками зусиль, пропорційних масі візка, що зважується, чи осі об'єкта й одержати інформацію про реальну масу об'єкта, що зважується.
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for weighing moving objects
Автори англійськоюKalinin Oleksandr Ivanovych, Kalinin Oleksandr Oleksandrovych
Назва патенту російськоюСпособ взвешивания движущихся объектов
Автори російськоюКалинин Александр Иванович, Калинин Александр Александрович
МПК / Мітки
МПК: G01G 19/04, G01G 19/02
Мітки: зважування, об'єктів, спосіб, рухомих
Код посилання
<a href="https://ua.patents.su/3-68137-sposib-zvazhuvannya-rukhomikh-obehktiv.html" target="_blank" rel="follow" title="База патентів України">Спосіб зважування рухомих об’єктів</a>
Спосіб зважування рухомих зчеплених залізничних піввагонів під час їхнього завантаження сипким матеріалом
Номер патенту: 67915
Опубліковано: 15.07.2004
Автор: Калінін Олександр Олександрович
МПК: G01G 19/04, G01G 11/00
Мітки: зважування, залізничних, матеріалом, рухомих, завантаження, їхнього, піввагонів, сипким, спосіб, зчеплених
Формула / Реферат:
Спосіб зважування рухомих зчеплених залізничних піввагонів під час їхнього завантаження сипким матеріалом, що включає подання сипкого матеріалу в піввагони, передавання інформації про масу матеріалу в блок керування затвором накопичувального бункера, який відрізняється тим, що зважування матеріалу в піввагонах здійснюють на двох механічно незв'язаних вагових модулях, перший з яких, що має довжину вантажоприймальної платформи меншу, ніж...
Спосіб зважування рухомих об`єктів
Номер патенту: 17600
Опубліковано: 06.05.1997
Автор: Дашевський Яків Тевелович
МПК: G01G 23/00, G01G 19/04
Мітки: об'єктів, спосіб, рухомих, зважування
Формула / Реферат:
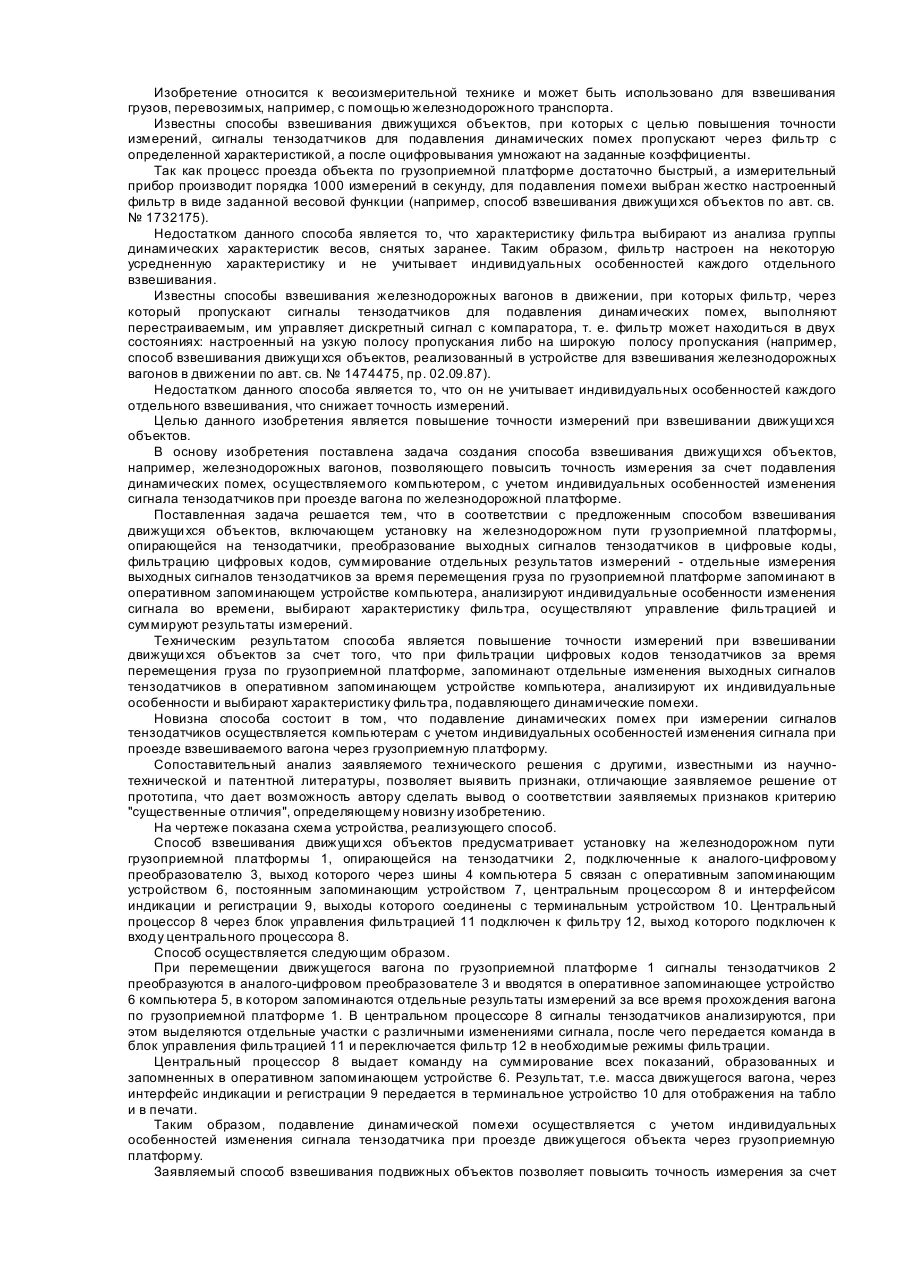
Способ взвешивания движущихся объектов, включающий установку на железнодорожном пути грузоприемной платформы, опирающейся на тензодатчики, преобразование выходных сигналов тензодатчиков в цифровые коды, фильтрацию цифровых кодов, суммирование отдельных результатов измерений, отличающийся тем, что отдельные измерения выходных сигналов тензодатчиков за время перемещения груза по грузоприемной платформе запоминают в оперативном запоминающем...
Спосіб поколесного зважування рухомих об’єктів
Номер патенту: 22542
Опубліковано: 17.03.1998
Автор: Калінін Олександр Іванович
МПК: G01G 19/04
Мітки: поколесного, спосіб, рухомих, зважування, об'єктів
Формула / Реферат:
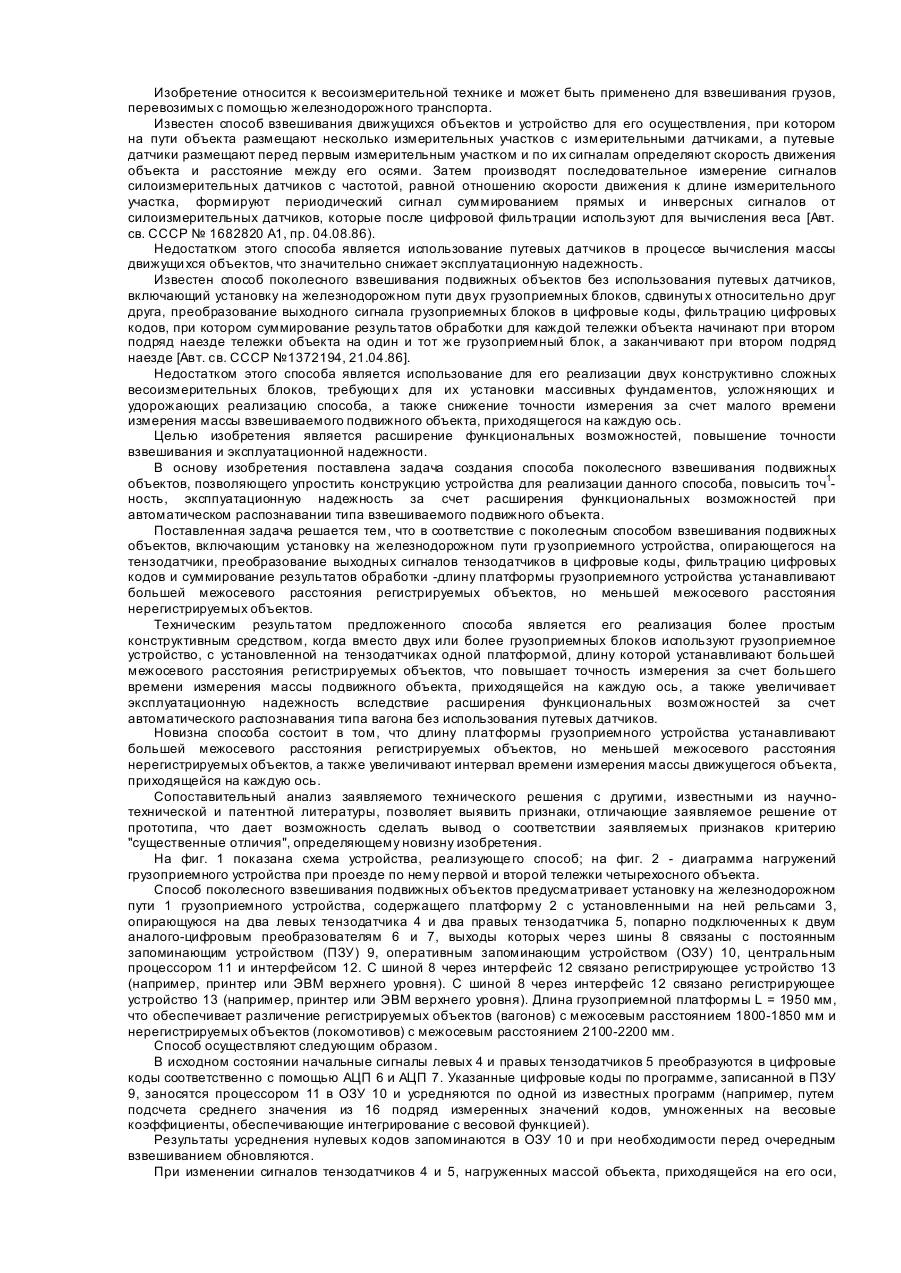
Способ поколесного взвешивания подвижных объектов, включающий установку на железнодорожном пути грузоприемного устройства, опирающегося на тензодатчики, преобразование выходных сигналов тензодатчиков в цифровые коды, фильтрацию цифровых кодов и суммирование результатов обработки, отличающийся тем, что длину платформы грузоприемного устройства с расположенными на ней рельсами устанавливают большей межосевого расстояния регистрируемых объектов,...
Спосіб поосного зважування автомобілів у русі
Номер патенту: 44669
Опубліковано: 15.02.2002
Автор: Нікітінський Михайло Павлович
МПК: G01G 19/03, G01G 19/02
Мітки: спосіб, русі, поосного, автомобілів, зважування
Формула / Реферат:
Спосіб поосного зважування автомобілів у русі, який передбачає установлення на полотні дороги вагового пристрою, визначення навантаження на кожну вісь автомобіля, підсумовування окремих результатів вимірювань, який відрізняється тим, що у ваговому пристрої використовують вантажоприймальну платформу довжиною, більшою, ніж сума міжосьових відстаней строєних осей автомобіля, але меншою, ніж відстань між одиночною та здвоєною осями і відстань між...
Пристрій для зважування рухомих залізничних составів
Номер патенту: 12608
Опубліковано: 28.02.1997
Автори: Сільванський Микола Олександрович, Цимбалюк Анатолій Григорович, Нікітінський Михайло Павлович
МПК: G01G 19/04
Мітки: рухомих, зважування, составів, залізничних, пристрій
Формула / Реферат:
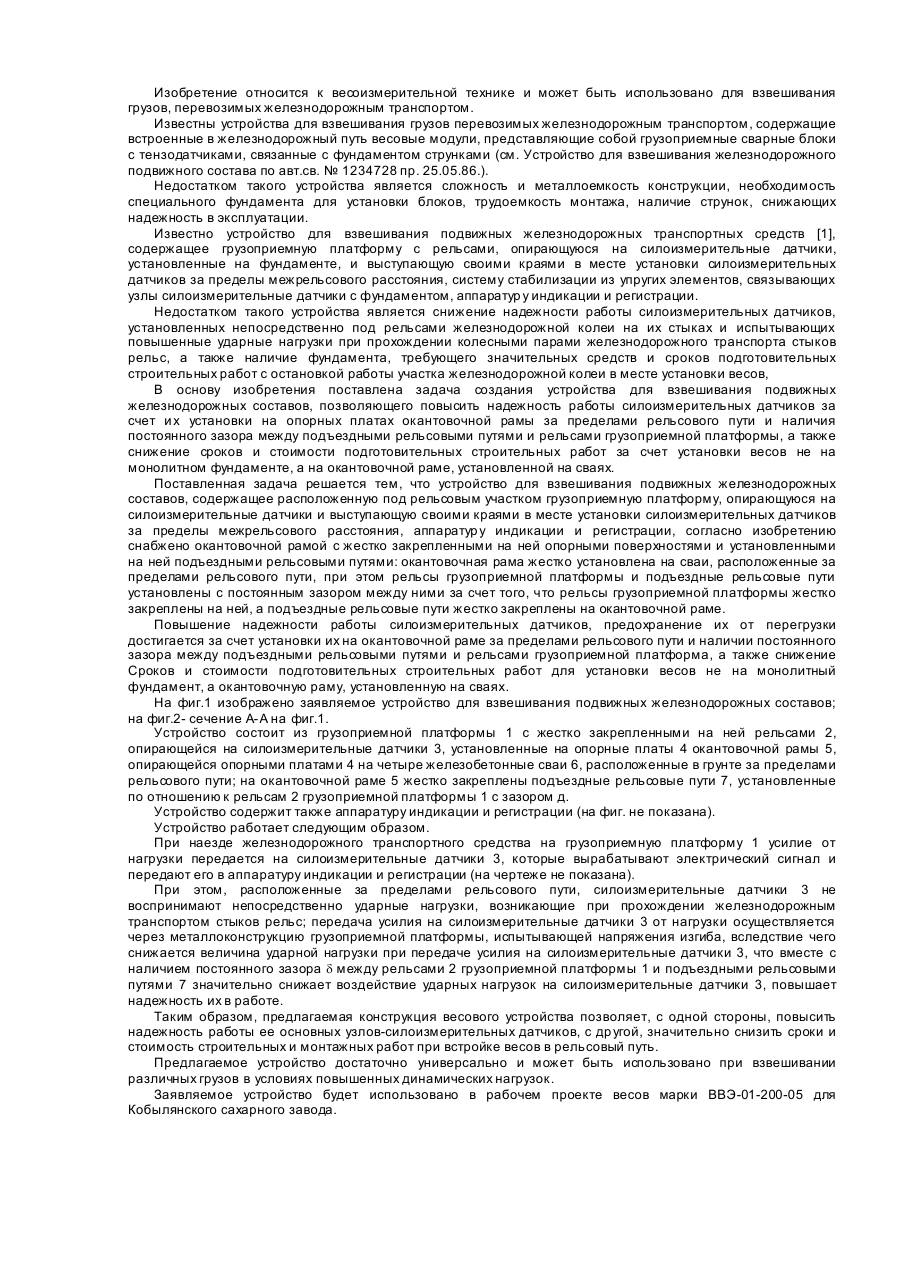
Устройство для взвешивания железнодорожных подвижных составов, содержащее расположенную под рельсовым участком грузоприемную платформу с рельсами, опирающуюся на силоизмерительные датчики и выступающую своими краями в месте установки силоизмерительных датчиков за пределы межрельсового расстояния, аппаратуру индикации и регистрации, отличающееся тем, что оно снабжено окантовочной рамой с жестко закрепленными опорными платами и...
Попередній патент: Спосіб ідентифікації генотипів ячменю
Наступний патент: Безалкогольний тонізуючий напій “тропік”
Випадковий патент: Хліб безглютеновий з рисовим борошном