Пристрій для зважування на кранах у динамічних умовах
Номер патенту: 18201
Опубліковано: 15.11.2006
Автори: Потильчак Олексій Петрович, Черепащук Григорій Олександрович
Формула / Реферат
Пристрій для зважування на кранах у динамічних умовах, що являє собою тензорезисторний перетворювач сили, підсилювач, блок обчислення та індикатор, який відрізняється тим, що до входу підсилювача, котрий виконаний багатоканальним, підключено два мікромеханічні акселерометри, перший з яких орієнтований у вертикальній площині, зв'язаної з пристроєм системи координат, другий - у горизонтальній площині, зв'язаної з пристроєм системи координат, вихід підсилювача в свою чергу з'єднаний з входом аналого-цифрового перетворювача, вихід якого з'єднаний з входом блока обчислення, керуючий вихід якого з'єднаний з керуючим входом підсилювача.
Текст
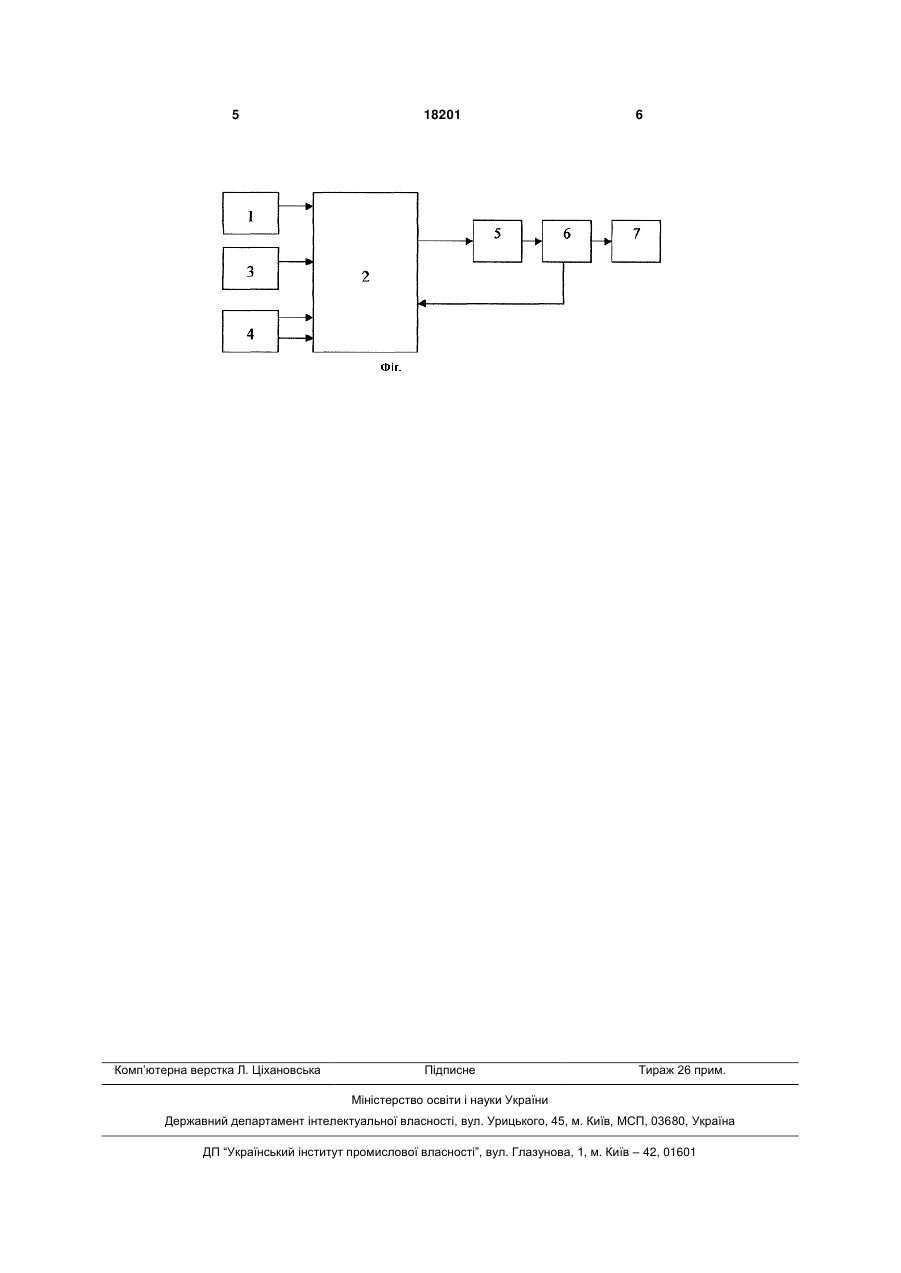
Пристрій для зважування на кранах у динамічних умовах, що являє собою тензорезисторний перетворювач сили, підсилювач, блок обчислення 3 18201 4 пристрій для зважування на кранах у динамічних показів пристрою. умовах, що являє собою тензорезисторний перетПід час розгойдування пристрою з вантажем ворювач сили, підсилювач, блок обчислення та виникає нестабільність показів пристрою, яка приіндикатор, і в якому, згідно з корисною моделлю, зводить до збільшення часу вимірювання. З метою до входів підсилювача, котрий виконаний багатоусунення нестабільності показів у блоці обчисленканальним, підключено два мікромеханічні аксеня 6 відбувається обчислення дійсного значення лерометри, перший з яких орієнтований у вертимаси вантажу згідно з формулою кальній площині зв'язаної з пристроєм системи g , m m' координат, другий - у горизонтальній площині зв'я(1) 2 a zk g a2 a2 k 2 x y заної з пристроєм системи координат, вихід підсилювача в свою чергу з'єднаний з входом аналогоде m - дійсна маса вантажу; цифрового перетворювача, вихід якого з'єднаний з m' - виміряне значення маси вантажу; входом блоку обчислення, керуючий вихід якого g - прискорення вільного падіння; з'єднаний з керуючим входом підсилювача. аz - прискорення пристрою по осі OZ зв'язаної Використання мікромеханічних акселерометрів з пристроєм системи координат; дозволяє підвищити швидкодію пристрою під час k - конструктивний параметр пристрою, який динамічних зважувань, зокрема під час розгойдухарактеризує відношення відстані між точкою підвання пристрою з вантажем. вісу пристрою та центром мас вантажу до відстані Використання аналого-цифрового перетворюміж центрами мас пристрою та вантажу, його невача дозволяє підвищити точність та роздільну обхідно враховувати, тому що прискорення вантаздатність пристрою. жу під час розгойдування пристрою з вантажем На кресленні (Фіг.) зображено структурну схевідрізняється від прискорення пристрою, котре му пристрою для зважування на кранах у динамічвимірюється мікромеханічними акселерометрами них умовах. 3 та 4; Пристрій для зважування на кранах у динамічаx - прискорення пристрою по осі ОХ зв'язаної них умовах складається з тензорезисторного пез пристроєм системи координат; ретворювача сили 1, підключеного до першого ау - прискорення пристрою по осі OY зв'язаної входу підсилювача 2, котрий виконаний багатоказ пристроєм системи координат. нальним. До другого входу підсилювача 2 підклюБлок обчислення 6 формує цикл вимірювання, чений мікромеханічний акселерометр 3, а до треякий складається з послідовного аналоготього та четвертого входів підсилювача 2 цифрового перетворення вихідних сигналів підсимікромеханічний акселерометр 4. Вихід підсилюлювача 2, що відповідають значенням m', аz, аx, aу вача 2 з'єднаний з входом аналого-цифрового пета обчислення дійсного значення маси вантажу m ретворювача 5, до виходу якого підключений блок за формулою (1). Значення конструктивного параобчислення 6. До виходу блока обчислення 6 підкметру k змінюється під час експлуатації, і може лючений індикатор 7, керуючий вихід блоку обчисдорівнювати від 1 до 2. При значній різниці між лення 6 підключений до керуючого входу підсилюзначенням k, що використовується під час обчисвача 2. лення дійсного значення маси вантажу, та реальПристрій працює наступним чином. Маса ванним значенням k результат обчислення формули тажу перетворюється у тензорезисторному перет(1) не відповідає дійсному значенню маси вантажу. ворювачі сили 1 в електричний сигнал, який подаВикористання формули (1) в такому випадку лише ється на перший вхід підсилювача 2. Вихідний зменшує амплітуду коливань показів пристрою, сигнал мікромеханічного акселерометра 3, який при чому вона буде тим меншою, чим ближче знапропорційний прискоренню пристрою по осі OZ чення k, що використовується під час обчислення, зв'язаної з пристроєм системи координат подастьдо реального. Таким чином, використовуючи інфося на другий вхід підсилювача 2. Вихідні сигнали рмацію про різницю між значеннями m, отриманимікромеханічного акселерометра 4, котрі пропорми у двох сусідніх циклах вимірювання, блок обчиційні прискоренням пристрою по осям ОХ та OY, слення 6 здійснює адаптивний підбір значення k зв'язаної з пристроєм системи координат подадо тих пір, поки не стане справедливим вираз ються на третій та четвертий входи підсилювача 2. m' , (2) В залежності від стану керуючого входу підсилюде m' - різниця між значеннями m’, отримавача 2, на який подається сигнал з керуючого виними у двох сусідніх циклах вимірювання; ходу блока обчислення 6, на вихід підсилювача - припустима похибка усунення нестабільнопоступає підсилений сигнал, поданий на один з сті показів. його входів. Сигнал з виходу підсилювача 2 подаПеревагами представленого пристрою у поріється па вхід аналого-цифрового перетворювача внянні з аналогами є: 5, де перетворюється у цифровий код. Цифровий - можливість швидкого зважування вантажів у код подається на вхід блоку обчислення 6, де віддинамічних умовах, зокрема під час розгойдування бувається обробка вимірювальної інформації. Цивантажу; фровий код з виходу блоку обчислення 6 подаєть- висока точність та роздільна здатність. ся на вхід індикатора 7, з якого здійснюється відлік 5 Комп’ютерна верстка Л. Ціхановська 18201 6 Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for weighing a load when lifting the load by a crane
Автори англійськоюCherepaschuk Hryhorii Oleksandrovych
Назва патенту російськоюУстройство для взвешивания груза при подъеме краном
Автори російськоюЧерепащук Григорий Александрович
МПК / Мітки
МПК: G01G 9/00
Мітки: зважування, пристрій, кранах, динамічних, умовах
Код посилання
<a href="https://ua.patents.su/3-18201-pristrijj-dlya-zvazhuvannya-na-kranakh-u-dinamichnikh-umovakh.html" target="_blank" rel="follow" title="База патентів України">Пристрій для зважування на кранах у динамічних умовах</a>
Пристрій для зважування в умовах коливань вантажу

Номер патенту: 72094
Опубліковано: 17.01.2005
Автори: Калінін Олександр Іванович, Калінін Олександр Олександрович
МПК: G01G 19/00
Мітки: коливань, зважування, пристрій, вантажу, умовах
Формула / Реферат:
Пристрій для зважування в умовах коливань вантажу, що містить вантажоприймальний вузол, встановлений на основному силовимірювальному тензодатчику, нерухомо встановленому на жорсткій основі, додатковий силовимірювальний тензодатчик з еталонним вантажем, який відрізняється тим, що додатковий силовимірювальний тензодатчик з еталонним вантажем нерухомо горизонтально розміщений у порожнині основи таким чином, що точка прикладання навантаження...
Пристрій для визначення ваги розплаву у ковшах на підйомних кранах
Номер патенту: 55852
Опубліковано: 15.04.2003
Автори: Самчелєєв Юрій Павлович, Дорофєєв Володимир Миколайович, Дрючин Віктор Гаврилович
МПК: G01G 19/00, G01N 5/00, B66C 13/00
Мітки: кранах, визначення, підйомних, пристрій, ваги, ковшах, розплаву
Формула / Реферат:
Пристрій для визначення ваги розплаву у ковшах на підйомних кранах, що містить перший та другий аналого-цифрові перетворювачі, три суматори, перший та другий помножувачі, цифровий блок задавання, що має три виходи, індикатор ваги розплаву та індикатор ваги одного компонента розплаву, при цьому вихід першого аналого-цифрового перетворювача з'єднаний з одним із входів першого помножувача, вихід другого помножувача з'єднаний з входом індикатора...
Пристрій для вимірювання в динамічних умовах ширини щілини з переміщуваними в мікронних межах краями
Номер патенту: 10119
Опубліковано: 15.11.2005
Автори: Романюк Владислав Федорович, Поперенко Леонід Володимирович, Вінніченко Катерина Леонідівна, Зависляк Ігор Володимирович
МПК: G01B 11/04, G01B 9/08
Мітки: мікронних, умовах, динамічних, ширини, межах, вимірювання, переміщуваними, краями, щілини, пристрій
Формула / Реферат:
Пристрій для вимірювання в динамічних умовах ширини мікрощілини з переміщуваними її краями, що містить освітлювальну систему, пристрій реєстрації з вхідним вікном світлового пучка, який відрізняється тим, що за освітлювальною системою в нього введені за ходом світлового променя формувач профілю мікрощілини, проекційна система з мікрооб'єктивом з мікрометричною сіткою та колективною лінзою, а в площині сформованого проекційною системою...
Спосіб зважування вантажів
Номер патенту: 62555
Опубліковано: 15.12.2003
Автори: Ситий Володимир Іванович, Раздобаров Віктор Георгійович, Сацюк Валерій Іванович, Чаков Олександр Миколайович, Лісовий Віталій Васильович
МПК: G01G 23/18
Мітки: спосіб, зважування, вантажів
Формула / Реферат:
Спосіб зважування вантажів, що включає дискретні виміри сигналу силовимірювальних датчиків, підсумовування дискретних значень сигналу протягом визначеного інтервалу часу, обчислення середнього значення сигналу за інтервал часу і видачу результату на вихідні пристрої, який відрізняється тим, що визначають розмах амплітуд завади (Uі + Uі+1) шляхом обчислення різниці максимального (Umax) і мінімального (Umin) значень сигналу в кожнім періоді...
Пристрій для повізкового зважування залізничних вагонів
Номер патенту: 60679
Опубліковано: 15.10.2003
Автори: Сацюк Валерій Іванович, Павлець Олексій Гаврилович, Нагіх Констянтин Валерійович, Лісовий Віталій Васильович, Архіпов Олександр Миколайович, Раздобаров Віктор Георгійович, Чаков Олександр Миколайович
МПК: G01G 5/00, G06G 7/00, G01G 19/04
Мітки: повізкового, залізничних, зважування, пристрій, вагонів
Формула / Реферат:
Пристрій для повізкового зважування залізничних вагонів, який містить вантажопрймальну платформу з ваговимірювальними датчиками, підключеними до вхідного блока, вихід якого з'єднаний з входом аналого-цифрового перетворювача (АЦП), вихід якого підключений до інформаційного входу обчислювального блока, з'єднаного з термінальною апаратурою, шляхові датчики, що підключені через формуючі підсилювачі до блока ідентифікації візків вагонів, який...
Попередній патент: Суміш органічних розчинників для комплексного використання у флексографії
Наступний патент: Спосіб перетворення потенційної енергії атмосферного тиску в механічну енергію
Випадковий патент: Спосіб виробництва труб