Спосіб підвищення точності роботи направляючих і пристрій для його здійснення
Номер патенту: 40072
Опубліковано: 16.07.2001
Автори: Бабін Олег Фавієвич, Мельник Максим Сергійович, Ковальов Віктор Дмитрович

Формула / Реферат
1.Спосіб підвищення точності роботи направляючих, при якому здійснюється корекція положення рухомого вузла за допомогою приводів малих переміщень, відрізняється тим, що у якості вимірюваальної бази використовують еталонну поверхню, яка має форму траєкторії руху рухомого вузла, контролюють положення рухомого вузла за допомогою взаємодії датчиків з еталонною поверхнею, які вимірюють величину відхилення положення рухомого вузла відносно еталонної поверхні, при цьому датчики з'єднані з приводами малих переміщень, які здатні переміщувати рухомий вузол у напрямку, протилежному відхиленню, що виміряне датчиками, на величину, яка виміряна датчиками.
2.Пристрій для підвищення точності роботи направляючих, що містить направляючі, рухомий вузол, розташований на гідростатичних опорах, регулятори подачі мастила у кишені гідростатичних опор, насосну станцію, підсилювачі постійного струму і фотоелектричні датчики, відрізняється тим, що пристрій обладнаний еталонною поверхнею, виконаною у вигляді двох паралельних променів світла, що створюється двома малопотужними лазерами, а датчики встановлені на рухомому вузлі з можливістю взаємодії з променями світла, причому датчики з'єднані з регуляторами подачі мастила через підсилювачі таким чином, що зміненім товщини шару мастила, яке викликане сигналом від датчика, викликає переміщення рухомого вузла у напрямку, протилежному відхиленню, що виміряне датчиками.
Текст
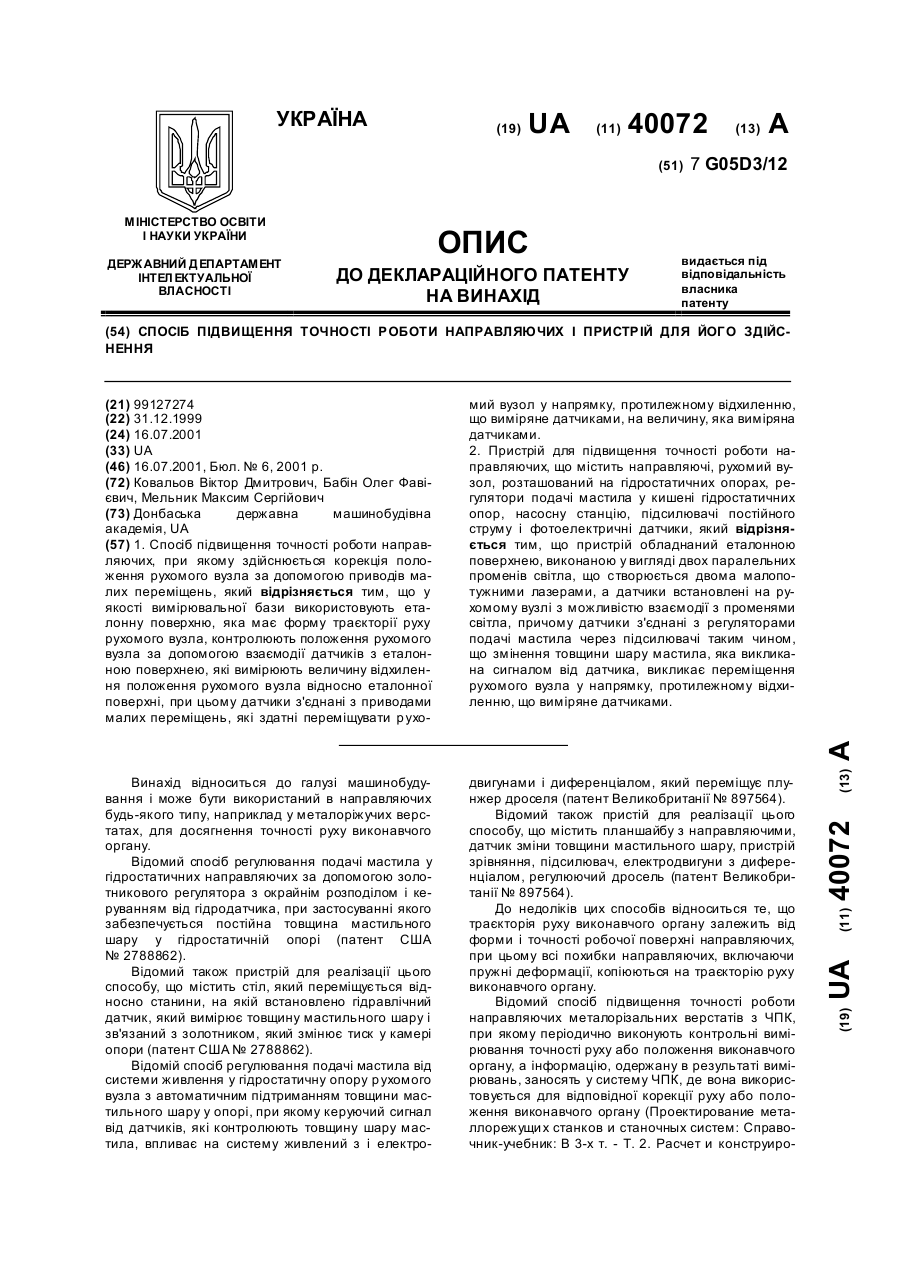
1. Спосіб підвищення точності роботи направляючих, при якому здійснюється корекція положення рухомого вузла за допомогою приводів малих переміщень, який відрізняється тим, що у якості вимірювальної бази використовують еталонну поверхню, яка має форму траєкторії руху рухомого вузла, контролюють положення рухомого вузла за допомогою взаємодії датчиків з еталонною поверхнею, які вимірюють величину відхилення положення рухомого вузла відносно еталонної поверхні, при цьому датчики з'єднані з приводами малих переміщень, які здатні переміщувати р ухо 40072 вание узлов и элементов станков / А.С. Пронников, Е.И. Борисов, В.В. Бушуев и др.; Под общ. ред. А.С. Пронникова. - М.: Издательство МГТУ им. Н.Э. Баумана: Машиностроение, 1995. – С. 320, ил.). До недоліків цього способу слід віднести періодичність операції контрольного вимірювання, обмеженість галузі застосування (верстати з ЧПК), а також обмеженість точності корекції точністю приводів та механізмів подачі верстату з ЧПК. В основу винаходу поставлена задача - підвищення точності траєкторії руху виконавчого органу за рахунок безперервної компенсації похибок робочої поверхні направляючих. Поставлена задача вирішується використанням у рухомому вузлі приводів малих переміщень, компенсуючих похибки направляючих, керування якими здійснюється за допомогою датчиків, взаємодіючих з еталонною поверхнею. Еталонною поверхнею може бути копірна лінійка, струна або промінь світла. Датчик може бути: контактним, фотоелектричним, параметричним або іншим. Привод малих переміщень може бути: електромеханічним, гідравлічним, теплофізичним тощо. Крім того, як привод малих переміщень можуть бути використані гідростатичні опори рухомого вузла, у яких регулюється товщина шару мастила, а також власні приводи виконавчого вузла, наприклад, привод поперечної подачі токарного верстату, якщо такі є. Запропоноване технічне рішення відповідає критерію "винахідницький рівень", тому що в те хніці не відомо використання еталонної поверхні для компенсації похибок реальної поверхні направляючих Суть способу заключається у тому, що з метою досягнення високої точності руху виконавчого органу у якості вимірювальної бази використовується еталонна поверхня, яка має форму траєкторії руху рухо вого вузла, датчик безперервно контролює положення рухомого вузла відносно еталонної поверхні, і у випадку відхилення від заданого значення виробляє сигнал корекції, який керує приводом малих переміщень, коректуючим положення рухомого вузла. Корекція може виконуватись у одному або декількох напрямках. Прикладом реалізації способу може бути пристрій, що містить руховий вузол на гідростатичних направляючих, п'ять фотоелектричних датчиків, встановлених на рухомому вузлі, еталонну поверхню у вигляді двох паралельних променів світла, підсилювачі постійного струму і регулятори подачі мастила у кишені гідростатичної опори. У якості приводів малих переміщень використовуються гідростатичні опори з можливістю керування і товщиною шару мастила шляхом зміни подачі мастила у відповідну кишеню опори. Роль джерел світла можуть виконувати малопотужні лазери, або лампи розжарювання з відповідною оптичною системою. Використання в пристрої датчиків, взаємодіючих з еталонною поверхнею у п'яти точках, які створюють опорну і направляючу вимірювальні бази, дозволяє зменшити відхилення від прямолінійності направляючих по двом напрямам до значення відхилень еталонної поверхні, а також виключити повороти рухомого вузла навколо трьох осей координат. На кресленні приведена схема пристрою. На фіг. 1 зображений вид спереду, на фіг. 2 - вид зверху, на фіг. 3 - поперечний розтин напрямних, на фіг. 4 - схема з'єднання датчика, підсилювача і регулятора подачі мастила. Пристрій містить: рухомий вузол 1, направляючі 2, проміні світла 3, фотоелектричні датчики положення 4...8, гідростатичні опори 9, які керуються товщиною шару мастила, і умовно зображені на схемі у вигляді гідроциліндрів, насосну станцію 10, підсилювач постійного струму 11, регулятор подачі мастила 12, напівпрозоре дзеркало 13. Кожен з фотоелектричних датчиків положення 4...8 містить два фотодіоди 14, розташовані поряд. Датчики взаємодіють з променями світла. Датчики 4, 7, 8 вимірюють переміщення у напрямку осі Х , а датчики 5, 6 - у напрямку осі Y. Кожний з датчиків має електричний зв'язок з підсилювачем, який, у свою чергу, керує регулятором подачі мастила у відповідну кишеню гідростатичної опори. Керування подачею мастила здійснюється таким чином, що зміна товщини шару мастила здійснюється в кишені, біля якої розташований її датчик, який керує, у напрямку, протилежному зміщенню, яке вимірюється. Таким чином, кожен датчик зі своїм підсилювачем, регулятором і кишенею гідростатичної опори, створюють коло від'ємного зворотного зв'язку, який стабілізує положення рухомого вузла по п'яти ступенях свободи. Елементи пристрою можливо здійснити таким чином. У якості джерел променів світла використовуються малопотужні напівпровідникові або гелієві лазери. Фотоелектричні датчики можуть бути будь-якого типу, наприклад, напівпровідникові фотодіоди, вихідний сигнал яких змінюється по монотонній безперервній функції залежно від освітленості, або від положення крапки, у яку попадає промінь світла. Підсилювачі постійного струму можуть бути виконані по будь-якій схемі на напівпровідникових або електронновакуумних елементах. Регуляторами подачі мастила можуть бути дроселі, що регулюються з приводом від електродвигуна постійного струму, або з електромагнітним приводом. 2 40072 Фіг. 1 Фіг. 2 Фіг. 3 Фіг. 4 __________________________________________________________ ДП "Український інститут промислової власності" (Укрпатент) Україна, 01133, Київ-133, бульв. Лесі Українки, 26 (044) 295-81-42, 295-61-97 __________________________________________________________ Підписано до друку ________ 2001 р. Формат 60х84 1/8. Обсяг ______ обл.-вид. арк. Тираж 50 прим. Зам._______ ____________________________________________________________ УкрІНТЕІ, 03680, Київ-39 МСП, вул. Горького, 180. (044) 268-25-22 ___________________________________________________________ 3
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of accuracy increase of guide operation and device for its implementation
Автори англійськоюKovaliov Viktor Dmytrovych, Babin Oleh Faviyevych, Melnyk Maksym Serhiyovych
Назва патенту російськоюСпособ повышения точности работы направляющих и устройство для его осуществления
Автори російськоюКовалев Виктор Дмитриевич, Бабин Олег Фавиевич, Мельник Максим Сергеевич
МПК / Мітки
МПК: G05D 3/12
Мітки: спосіб, роботи, точності, пристрій, направляючих, підвищення, здійснення
Код посилання
<a href="https://ua.patents.su/3-40072-sposib-pidvishhennya-tochnosti-roboti-napravlyayuchikh-i-pristrijj-dlya-jjogo-zdijjsnennya.html" target="_blank" rel="follow" title="База патентів України">Спосіб підвищення точності роботи направляючих і пристрій для його здійснення</a>
Спосіб перевірки ступеня точності або надійності засобів вимірювання і пристрій для його здійснення
Номер патенту: 26902
Опубліковано: 29.12.1999
Автор: ГОУЛД Грегорі
МПК: G01N 1/20
Мітки: перевірки, здійснення, точності, засобів, вимірювання, ступеня, надійності, пристрій, спосіб
Формула / Реферат:
(57) 1. Способ проверки степени точности или надежности средств измерения, используемых при измерении одной или более характеристик сыпучего материала, включающий этапы измерения одной или более характеристик сыпучего материалас помощью средств измерения, отличающийся тем, что одновременно измеряют одну или более переменных, независимых от средств измерения характеристик сыпучего материала, но прямо или косвенно влияющих на нормальную...
Спосіб роботи холодильної машини та пристрій для його здійснення
Номер патенту: 1388
Опубліковано: 25.03.1994
Автори: Тітлов Олександр Сергійович, Чайковський Владислав Феліксович
МПК: F25B 15/00
Мітки: здійснення, роботи, холодильної, спосіб, машини, пристрій
Формула / Реферат:
1. Способ работы абсорбционной холодильной машины, включающий генерацию паров хладагента-сорбента, подачу паров хладагента в конденсатор, их сжижение, дросселирование жидкого хладагента с последующим кипением и поглощением паров хладагента в процессе абсорбции слабым раствором, отличающийся тем, что в качестве хладагента используют смесь с различными нормальными температурами кипения, причем каждый из компонентов смеси является сорбатом, а в...
Спосіб роботи двигуна внутрішнього згорання і пристрій для його здійснення
Номер патенту: 20964
Опубліковано: 07.10.1997
Автори: Васильєв Ігор Павлович, Станіславський Леопольд Викторович, Дзецина Олексій Олегович, Дзеціна Олег Петрович
МПК: F02D 21/00
Мітки: внутрішнього, роботи, пристрій, згорання, здійснення, двигуна, спосіб
Формула / Реферат:
1. Способ работы двигателя внутреннего сгорания путем заполнения цилиндра воздухом, сжатия воздуха в цилиндре, сгорания топливовоздушной смеси, расширения продуктов сгорания и подач дополнительного газа через дополнительный впускной клапан после окончания подачи топлива, отличающийся тем, что в качестве дополнительного газа подают газ с переменной по углу поворота коленчатого вала концентрацией кислорода и газом дополнительно турбулизируют...
Спосіб підвищення проникності рідинно-газових колекторів і пристрій для його здійснення
Номер патенту: 25244
Опубліковано: 30.10.1998
Автор: Бажал Анатолій Гнатович
МПК: E21B 43/25, E21B 43/28
Мітки: здійснення, підвищення, спосіб, рідинно-газових, колекторів, пристрій, проникності
Формула / Реферат:
1. Спосіб підвищення проникності рідинно-газових колекторів, містить в собі розкриття пласта корисної копалини свердловиною і заповнення її рідиною, генерування хвиль заданої структури на поверхні з наступним передаванням їх через стовп рідини в свердловину і поворотом хвиль уздовж пласта, відбиттям їх в зоні колектора, який відрізняється тим, що хвилі заданої структури передають з поверхні до колектора через рідинний хвилевод, утворений...
Спосібдля підвищення якості тяги та пристрій для його здійснення
Номер патенту: 31264
Опубліковано: 15.12.2000
Автори: Далека Василь Хомич, Гайдуков Валерій Євгенович, Мінєєва Юлія Віталіївна, Папуга Михайло Дмитрович
МПК: B60L 11/02
Мітки: підвищення, якості, здійснення, пристрій, тяги, спосібдля
Текст:
...о іш^льсwsm пдрдтворсвачаш, М* "Транспорт* IS86, с* 105, шл« $& ] % Шдоліксш відомого способ" те пристрію в неможливість його застосування « режимах тяги. Як, прототип прійнято спосіб» ЯКИЙ 8Ийориетов*ла£ь *^ пристрої для рег'^Блиня e?{rc*is збудження тягових еі:екї'род£ИГ!'Шв, Згіуцво s відед&ш способом лроводять вирівшвання які (них eggrcds при рси* боті |ггхоиогд скла^г w зшй кріра і іого стабілізацій ш рівні* що передо...
Попередній патент: Спосіб безперервного контролю та управління рн і лужністю соків цукрового виробництва
Наступний патент: Спосіб очищення грунтових вод та грунтів від нафтопродуктів
Випадковий патент: Пристрій для завантаження сипких матеріалів у клапанні мішки