Пристрій для автоматичного слідкування за частотою лінійними електричними колами
Формула / Реферат
1. Пристрій для автоматичного слідкування за частотою (АСЧ) лінійними електричними колами, який містить керований блок (КБ), петля зворотного керування якого містить послідовно з'єднані частотний дискримінатор (ЧД), згладжуючий фільтр нижніх частот (ЗФНЧ) і керуючий елемент (КЕ), вихід якого з'єднаний із входом керування КБ, вихід якого, будучи виходом пристрою АСЧ, з'єднаний із входом ЧД, який відрізняється тим, що КБ являє собою відомі керовані блок-схеми чи/і послідовного типу з одночасним керуванням, чи/і паралельного типу з одночасним або неодночасним керуванням, блоки яких є відомі, чи/і лінійні системи АСЧ, чи/і слідкувальні фільтри (СФ), чи/і типові лінійні електричні чи електронні кола з зосередженими параметрами.
2. Пристрій за п. 1, який відрізняється тим, що СФ є будь-якого типу вище другого порядку і певної реалізації, ЧД і КЕ мають лінійну статичну характеристику на робочому частотному діапазоні з невеликим запасом, а частота переходу ЧД досить точно дорівнює частоті початкової настройки блока КБ і ЗФНЧ є фільтром першого чи другого порядку.
Текст
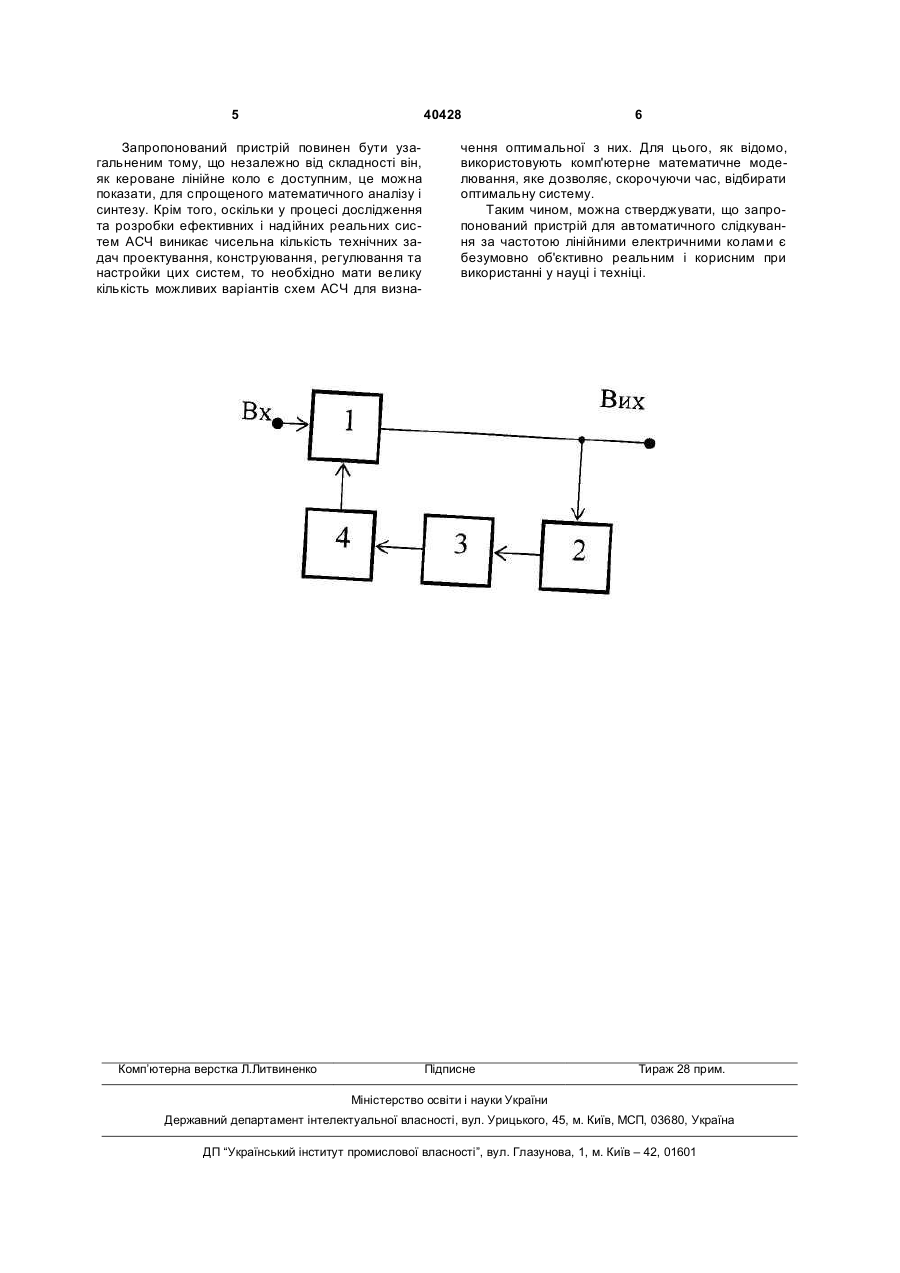
1. Пристрій для автоматичного слідкування за частотою (АСЧ) лінійними електричними колами, який містить керований блок (КБ), петля зворотного керування якого містить послідовно з'єднані частотний дискримінатор (ЧД), згладжуючий фільтр нижніх частот (ЗФНЧ) і керуючий елемент (КЕ), вихід якого з'єднаний із входом керування КБ, вихід якого, будучи виходом пристрою АСЧ, з'єд 3 ванням, блоки яких є відомі чи/і лінійні системи АСЧ, чи/і слідкувальні фільтри (СФ), чи/і типові лінійні електричні чи електронні кола з зосередженими параметрами [Трифонов И.И. Расчёт электронных цепей с заданными частотными характеристиками. М., «Радио и связь», 1988]. Відрізняється цей пристрій ще і тим, що СФ є будь-якого типу вище другого порядку і певної реалізації, ЧД і КЕ мають лінійну статичну характеристику на робочому частотному діапазоні з невеликим запасом, а частота переходу ЧД досить точно дорівнює частоті початкової настройки блоку КБ і ЗФНЧ є фільтром першого чи другого порядку. На кресленні, що додається, наведена структурна електрична схема пристрою АСЧ. На цій схемі позначено керований блок (КБ)-1, частотний дискримінатор (ЧД)-2, згладжуючий фільтр нижніх частот (ЗФНЧ)-3 і керуючий елемент (КЕ)-4. Входом пристрою АСЧ є сигнальний вхід блоку КБ-1, вихід якого є виходом пристрою АСЧ. Цей вихід з'єднаний зі входом керування КБ-1 через петлю зворотного керування, яка містить послідовно з'єднані ЧД-2, ЗФНЧ-3 і КЕ-4. Працює запропонований пристрій таким чином: Нехай напруга, що надходить на сигнальний вхід КБ-1 запропонованого пристрою АСЧ, являє собою довільний нестаціонарний процес - сигнал у загальному випадку разом з перешкодами. У початковий момент після підключення зазначеної напруги, коли зовнішнє діяння являє собою короткий імпульс, широкосмуговий спектр якого є суцільним і однорідним, на виході КБ-1 ще не встигає сформуватися початковий фронт перехідного процесу. З цієї причини на виході ЧД-2 відсутня управляюча напруга, тому зворотний зв'язок виявляється відключеним і КБ-1 працює у режимі стаціонарного кола. Однак, якщо керування блоком КБ-1 відбувалося би за відомим принципом масштабної перестройки, то вже на цьому початковому етапі припинився би наступний перехідний процес настройки КБ-1. Щоб цього не відбулося, необхідно використовувати інший принцип зміщення частоти настройки КБ-1. Режим стаціонарного КБ-1 буде продовжуватися доти, поки на його виході не сформується визначена частина початкового фронту перехідного процесу. У залежності від смуги пропускання КБ-1, він виділить зі зазначеного спектра лише відносно вузькосмугову частину його. Відповідно до основ спектрального синтезу, тривалість зазначеного початкового фронту обернено пропорційна смузі пропускання і частоті початково настроєного того кола, що входить до КБ-1. Під час формування на виході КБ-1 початкового фронту перехідного процесу, у визначений момент часу, у залежності від крутості цього фронту і величини порога спрацьовування ЧД-2, на його виході з'явиться визначеної величини напруга. Ця напруга надходить на вхід ЗФНЧ-3. Згладжена управляюча напруга з виходу ЗФНЧ-3 надходить на вхід КЕ-4, який перетворює управляючу напругу у керовані чи/і резистивний, чи/і ємнісний, чи/і ін 40428 4 дуктивний елементи. З цього моменту починається процес захоплювання - самонастроювання КБ-1. Характер цього процесу залежить тільки від функції миттєвої частоти, яка є наслідком взаємодії (биття) вільної і усталеної складових перехідного процесу на виході тепер вже нестаціонарного КБ1. Важливо помітити, що ця миттєва частота несе повну інформацію не тільки про функцію миттєвої частоти вхідного сигналу, але і про структурну особливість пристрою АСЧ у цілому. Саме функція цієї миттєвої частоти визначає закон самонастроювання, який по зворотному зв'язку трансформує характеристики КБ-1 так, що він поступово виявляється настроєний на частоту вхідного сигналу. Незалежно від зазначеного закону, у стійких фільтрах вільна складова перехідного процесу неодмінно згасає, залишається тільки усталена складова. Тому тривалість процесу самонастроювання однозначно визначається тільки тривалістю перехідного процесу на виході КБ-1. З закінченням процесу самонастроювання, коли на виході КБ-1 почнуть з'являтися перші коливання, на виході ЧД-2 з'явиться напруга, пропорційна частоті цих коливань. Так починається усталений режим утримання автоматично настроєного КБ-1 на відзначену частоту. Оскільки КБ-1 є лінійним колом і в ньому не міститься додаткових джерел коливання іншої частоти, то у цьому режимі сигнали на вході і виході КБ-1 не можуть відрізнятися один від іншого по частоті. Отже, КБ-1 виявляється досить точно настроєним на частоту саме вхідного сигналу, що і потрібно. Причому, цей результат не залежить ні від типу блоків, що входять до КБ-1, ні від його початкової настройки. Точність настройки чи значення залишкового розстроювання КБ-1 по відношенню до частоти вхідного сигналу, як відомо, залежать тільки від особливостей блоків, що входять у петлю зворотного зв'язку. Якщо частота вхідного сигналу повільно змінюється за будь-яким заздалегідь невідомим законом, то, відповідно до розглянутого принципу самонастроювання, пристрій АСЧ буде надійно відслідковувати зміни цієї частоти на усьому її діапазоні за умови, що верхня гранична частота спектру вхідного сигналу свідомо не перевищує так звану критичну частоту, вище якої пристрій АСЧ, як відомо, збуджується. Коли одна (номінальна) частота, яка заздалегідь обрана зі спектральних частот функції зміни частоти вхідного сигналу, збіжиться з частотою початково настроєного КБ-1, слідкування повинне призупинитися. Щоб це відбулося, значення перехідної частоти ЧД-2 повинно досить точно дорівнювати значенню зазначеної номінальної частоти, а щоб слідкуванням був охоплений увесь передбачуваний частотний діапазон зміни частоти вхідного сигналу необхідно, щоб характеристики ЧД-2 і УЕ-4 мали лінійну ділянку, яка перевищує з запасом цей діапазон. Відзначені особливості роботи запропонованого пристрою і зазначені вимоги до його окремих блоків є наслідком досліджень комп'ютерних різних математичних моделей, у яких використовувалися різні КБ-1, ЧД-2 і ЗФНЧ-3. 5 40428 Запропонований пристрій повинен бути узагальненим тому, що незалежно від складності він, як кероване лінійне коло є доступним, це можна показати, для спрощеного математичного аналізу і синтезу. Крім того, оскільки у процесі дослідження та розробки ефективних і надійних реальних систем АСЧ виникає чисельна кількість технічних задач проектування, конструювання, регулювання та настройки цих систем, то необхідно мати велику кількість можливих варіантів схем АСЧ для визна Комп’ютерна верстка Л.Литвиненко 6 чення оптимальної з них. Для цього, як відомо, використовують комп'ютерне математичне моделювання, яке дозволяє, скорочуючи час, відбирати оптимальну систему. Таким чином, можна стверджувати, що запропонований пристрій для автоматичного слідкування за частотою лінійними електричними колами є безумовно об'єктивно реальним і корисним при використанні у науці і техніці. Підписне Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for frequency automatic tracking with help of linear automatic circuits
Автори англійськоюTunyk Volodymyr Fedotovych
Назва патенту російськоюDevice for frequency automatic tracking with help of linear automatic circuits
Автори російськоюТуник Владимир Федотович
МПК / Мітки
МПК: G05B 13/02, H03H 21/00
Мітки: автоматичного, слідкування, пристрій, електричними, колами, частотою, лінійними
Код посилання
<a href="https://ua.patents.su/3-40428-pristrijj-dlya-avtomatichnogo-slidkuvannya-za-chastotoyu-linijjnimi-elektrichnimi-kolami.html" target="_blank" rel="follow" title="База патентів України">Пристрій для автоматичного слідкування за частотою лінійними електричними колами</a>
Пристрій для автоматичного слідкування за частотою нестаціонарними фільтрами
Номер патенту: 23124
Опубліковано: 10.05.2007
Автор: Туник Володимир Федотович
МПК: H03G 5/16
Мітки: фільтрами, слідкування, частотою, пристрій, автоматичного, нестаціонарними
Формула / Реферат:
1. Пристрій для автоматичного слідкування за частотою нестаціонарними фільтрами (АСНФ), який містить керований фільтр (КФ), петля зворотного зв'язку якого містить послідовно з'єднані частотний дискримінатор (ЧД), згладжуючий фільтр нижніх частот (ФНЧ) і керуючий елемент (КЕ), вихід якого з'єднаний із входом керування КФ, вихід якого, будучи виходом АСНФ, з'єднаний із входом ЧД, який відрізняється тим, що КФ є будь-який з відомих...
Пристрій для електроімпульсної терапії посиленими електричними сигналами тіла людини
Номер патенту: 12744
Опубліковано: 15.02.2006
Автори: ГАВРИЛЕНКО АНДРІЙ ВЛАДЛЕНОВИЧ, Григоренко Наталія Іванівна
МПК: A61N 1/00
Мітки: посиленими, терапії, електроімпульсної, сигналами, тіла, пристрій, людини, електричними
Формула / Реферат:
1. Пристрій для електроімпульсної терапії посиленими електричними сигналами тіла людини, який складається з генератора електричних імпульсів, підсилювача, провідника та контактного блоку, який відрізняється тим, що замість генератора електричних імпульсів використовують електричні сигнали, зняті з тіла здорової людини.2. Пристрій за п.1, який відрізняється тим, що електричні сигнали, зняті з тіла здорової людини, записують на...
Спосіб керування частотою генератора гармонічних коливань та пристрій для його здійснення
Номер патенту: 55288
Опубліковано: 17.03.2003
Автор: Тверезовський Василь Семенович
МПК: G01R 23/00
Мітки: здійснення, генератора, пристрій, спосіб, коливань, частотою, керування, гармонічних
Формула / Реферат:
1. Спосіб керування частотою гармонічних коливань, в якому використовують генератор гармонічних коливань, в частотно-задавальному контурі якого використовують варикап, ємністю якого управляють напругою, чим змінюють частоту генератора, який відрізняється тим, що в способі також використовують програмований запам'ятовуючий пристрій, який наперед програмують, при цьому задаються значенням величини сходинки по частоті
Пристрій для налаштовування поза верстатом токарних різців за лінійними розмірами
Номер патенту: 3290
Опубліковано: 15.11.2004
Автори: Денисюк Віктор Юрійович, Михалевич Володимир Теофілович, Марчук Віктор Іванович, Кайдик Олег Леонтійович
МПК: B23B 25/00
Мітки: розмірами, різців, верстатом, токарних, налаштовування, лінійними, пристрій
Формула / Реферат:
1. Пристрій для налаштовування поза верстатом токарних різців за лінійними розмірами, що містить приладдя для налаштування на розмір, корпус, різець, кріпильні елементи та два індикатори, який відрізняється тим, що приладдя для налаштування на розмір виконано у формі двох індуктивних датчиків з блоком відтворювання інформації та системи підтискувачів, при цьому індуктивні датчики розміщені у двох взаємно перпендикулярних площинах.2....
Пристрій для автоматичного тримування
Номер патенту: 36470
Опубліковано: 27.10.2008
Автори: Прокоф'єва Тетяна Петрівна, Постніков Володимир Миколайович, Швець Наталія Сергіївна, Бандура Іван Миколайович
МПК: B64C 13/00
Мітки: тримування, автоматичного, пристрій
Формула / Реферат:
Пристрій для автоматичного тримування, що складається з послідовно з'єднаних підсилювача кермової машинки, двополярного порогового елемента з зоною нечутливості, реле часу, електромеханізму тримування і поляризованого реле, який відрізняється тим, що в нього введений перший та другий аналізатори сигналу керування на рискання, до того ж аналізатори сигналу керування на рискання ввімкнені між виходом підсилювача кермової машинки і входом реле...
Попередній патент: Акваріум
Наступний патент: Універсальна машина калібрування овочів
Випадковий патент: Проміжне кріплення рейки