Спосіб корегування траєкторії вільнопадаючого контейнера для доставки його у задану точку
Номер патенту: 43399
Опубліковано: 10.08.2009
Автори: Коваленко Ігор Анатолійович, Шмєльов Михайло Євгенович, Коврижкін Олег Георгійович
Формула / Реферат
Спосіб корегування траєкторії вільнопадаючого контейнера для доставки його у задану точку, що включає задання координат точки доставки контейнера, скидання контейнера з літального апарата, визначення поточних координат контейнера за допомогою системи супутникової навігації, який відрізняється тим, що задання координат точки доставки контейнера, зокрема географічної широти φТД, географічної довготи λТД та висоти НТД знаходження контейнера над земним геоїдом здійснюють за допомогою блока введення координат точки доставки контейнера з подальшою, після скидання контейнера з літального апарата, передачею їх в бортову цифрову обчислювальну машину, в яку також подають із системи супутникової навігації поточні координати контейнера, що спускається, зокрема поточні координати географічної широти φ, географічної довготи λ та висоти Н знаходження контейнера над земним геоїдом, та із датчика кутової швидкості сигнал про зміну кутової швидкості обертання контейнера ωх, при цьому за допомогою бортової цифрової обчислювальної машини на підставі значень заданих координат точки доставки контейнера φТД, λТД, НТД, і поточних координат контейнера φ, λ, Н з урахуванням сигналу про зміну кутової швидкості контейнера ωх формують сигнал управління рулями контейнера, що спускається, який подають в блок управління аеродинамічними рулями, і при досягненні значення поточної висоти Н знаходження контейнера над земним геоїдом, рівного заданому НТД, подають сигнал на відкривання парашута.
Текст
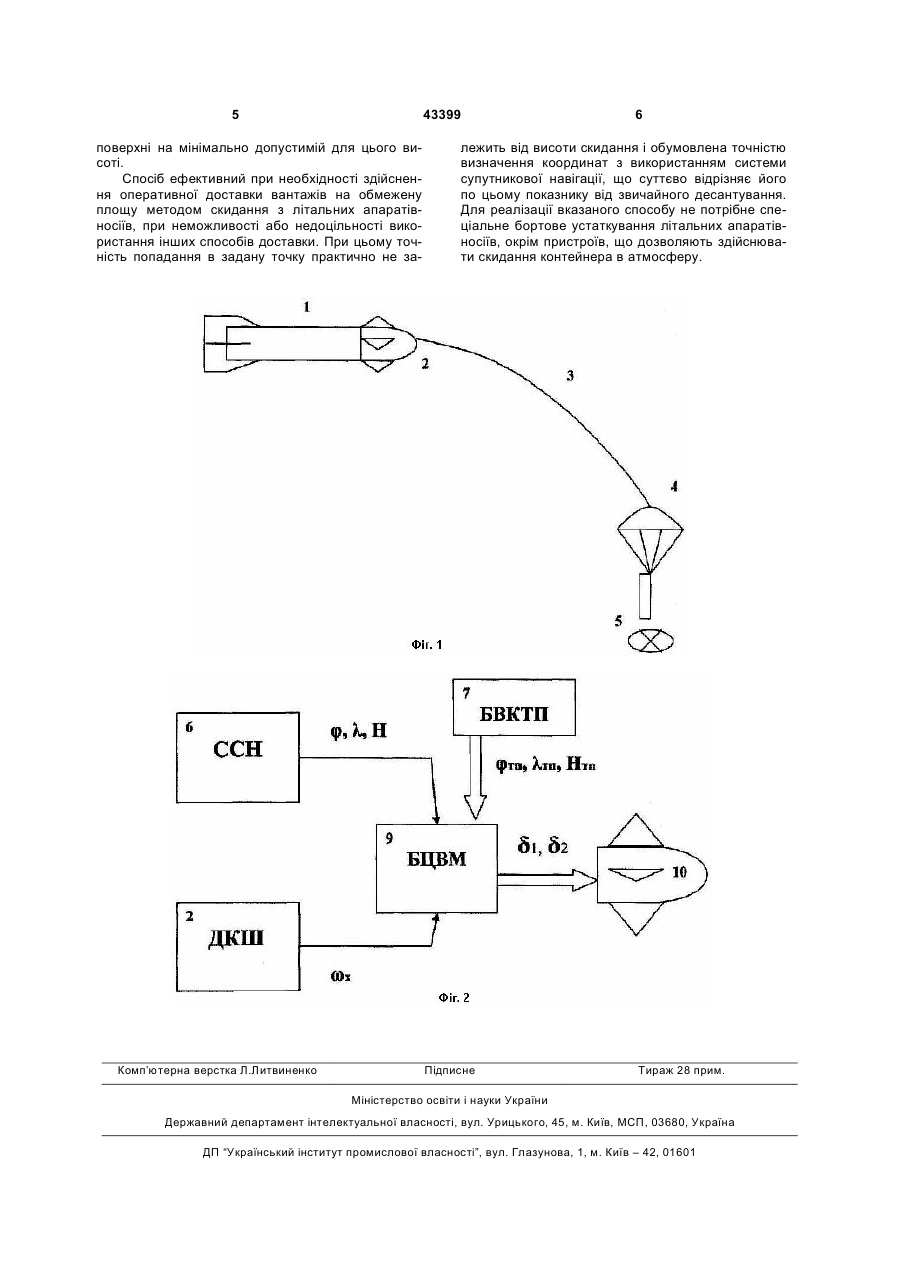
Спосіб корегування траєкторії вільнопадаючого контейнера для доставки його у задану точку, що включає задання координат точки доставки контейнера, скидання контейнера з літального апарата, визначення поточних координат контейнера за допомогою системи супутникової навігації, який відрізняється тим, що задання координат точки доставки контейнера, зокрема географічної широти φТД, географічної довготи λТД та висоти НТД знаходження контейнера над земним геоїдом здійснюють за допомогою блока введення координат U 2 (19) 1 3 Ознаками найближчого аналога, що збігаються з суттєвими ознаками запропонованої корисної моделі, є завдання координат точки доставки контейнера, скидання контейнера з літального апарату-носія, визначення поточних координат контейнера за допомогою системи супутникової навігації. Недоліком даного способу є те, що для його реалізації, крім пристроїв, що дозволяють здійснювати скидання вантажу в атмосферу, потрібне спеціальне бортове устаткування літальних апаратів-носіїв, крім того, використання аналога вантажу, як елемента коректування точки скидання вантажу, приводить до суттєвого збільшення сукупної вартості застосовуваного устаткування і потребує участі висококваліфікованого обслуговуючого персоналу та повторного заходу апаратаносія у точку скидання вантажу. При цьому даний спосіб не враховує можливі зміни швидкості і напряму вітру, що мають негативний вплив на точність доставки вантажу. В основу корисної моделі поставлено задачу створення способу корегування траєкторії вільнопадаючого контейнера, що забезпечує доставку його в задану точку з похибкою, яка не перевищує декількох десятків метрів, і вимагає наявності спеціального бортового устаткування літального апарату-носія, з якого проводиться скидання контейнера, що приведе до суттєвого зниження сукупної вартості доставки і до виключення вимоги щодо наявності висококваліфікованого обслуговуючого персоналу. Поставлена задача вирішена за рахунок того, що спосіб корегування траєкторії вільнопадаючого контейнера для його доставки у задану точку, включає завдання координат точки доставки контейнера, скидання контейнера з літального апарату, визначення поточних координат контейнера за допомогою системи супутникової навігації, відповідно до корисної моделі, завдання координат точки доставки контейнера, зокрема, географічної широти φТД, географічної довготи lТД та висоти НТД знаходження контейнера над земним геоїдом, здійснюють за допомогою блока введення координат точки доставки контейнера, з подальшою, після скидання контейнера з літального апарату, передачею їх в бортову цифрову обчислювальну машину, в яку також подають із системи супутникової навігації поточні координати контейнера, що спускається, зокрема, поточні координати географічної широти φ, географічної довготи l і висоти Н знаходження контейнера над земним геоїдом, та із датчика кутової швидкості сигнал про зміну кутової швидкості обертання контейнера ωх, при цьому за допомогою бортової цифрової обчислювальної машини на підставі значень заданих координат точки доставки контейнера φТД, lТД, НТД і поточних координат контейнера φ, l, Н, з урахуванням сигналу про зміну кутової швидкості контейнера ωх, формують сигнал управління рулями контейнера, що спускається, який подають в блок управління аеродинамічними рулями, і при досягненні значення поточної висоти Н знаходження контейнера над земним геоїдом, рівного заданому НТД, подають сигнал на відкривання парашута. 43399 4 Наведені нижче Фігури пояснюють сутність корисної моделі, що заявляється. Фігури креслення, як і опис прикладів конкретного виконання способу, наведені лише для ілюстрації заявленої корисної моделі і не обмежують обсяг прав, визначений формулою корисної моделі. Фіг. 1 - схема застосування способу корегування траєкторії вільнопадаючого контейнера для його доставки у задану точку; Фіг. 2 - структурна схема пристрою аеродинамічного управління вільнопадаючим контейнером в атмосфері. Після скидання контейнера 1 з літального апарату-носія в точці 2 відбувається подальше падіння контейнера, під час якого здійснюють корегування його траєкторії 3 за допомогою пристрою аеродинамічного управління вільнопадаючим контейнером в атмосфері. При досягненні контейнером мінімально допустимої для відкривання парашута висоти в заданій точці 4, здійснюють його відкривання і подальший плавний спуск контейнера в необхідну точку приземлення 5. У свою чергу пристрій аеродинамічного управління вільнопадаючим контейнером в атмосфері складається із системи супутникової навігації (ССН) 6, блока введення координат точки доставки (БВКТД) 7, датчика кутової швидкості (ДКШ) 8, пов'язаних з бортовою цифровою обчислювальною машиною (БЦОМ) 9, і блоку управління аеродинамічними рулями (БУАР) 10. Таким чином, в бортову цифрову обчислювальну машину 9 з системи супутникової навігації 6 подають поточні координати контейнера, зокрема, поточні координати географічної широти φ, географічної довготи l і висоти Н знаходження контейнера над земним геоїдом, з блоку введення координат точки доставки 7 подають задані координати точки доставки контейнера, зокрема, географічної широти φТД, географічної довготи lТД і висоти НТД знаходження контейнера над земним геоїдом, а з датчика кутової швидкості подають сигнал про зміну кутової швидкості обертання контейнера ωх. На підставі значень координат точки доставки контейнера φТД, lТД, НТД і значень поточних координат контейнера φ, l, Н, з урахуванням сигналу про зміну кутової швидкості контейнера ωх, в бортовій цифровій обчислювальній машині 9 розраховують необхідні координати положення пристрою, отримані за умови досягнення координат φТД та lТД при досягненні в процесі природного (балістичного) падіння висоти НТД=Н і формують сигнали управління рулями контейнера δ1 та δ2 (де δ1 сигнал управління рулями контейнера в каналі дальності (управління переміщенням у вертикальній площині падіння), а δ2 - сигнал управління рулями контейнера в каналі напряму (управління по курсу)), що подають в блок управління аеродинамічними рулями 10. Спосіб дозволяє забезпечувати обмежено (в межах допустимих аеродинамічних перевантажень) керований спуск (падіння) контейнера у вказану точку на поверхні землі (води). Для плавного спуску контейнера відкривання парашутної системи здійснюється в безпосередній близькості від 5 43399 поверхні на мінімально допустимій для цього висоті. Спосіб ефективний при необхідності здійснення оперативної доставки вантажів на обмежену площу методом скидання з літальних апаратівносіїв, при неможливості або недоцільності використання інших способів доставки. При цьому точність попадання в задану точку практично не за Комп’ютерна верстка Л.Литвиненко 6 лежить від висоти скидання і обумовлена точністю визначення координат з використанням системи супутникової навігації, що суттєво відрізняє його по цьому показнику від звичайного десантування. Для реалізації вказаного способу не потрібне спеціальне бортове устаткування літальних апаратівносіїв, окрім пристроїв, що дозволяють здійснювати скидання контейнера в атмосферу. Підписне Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of adjustment of trajectory of free-falling container for its delivery into given point
Автори англійськоюKovryzhkin Oleh Heorhiiovych, Kovalenko Ihor Anatoliiovych, Shmieliov Mykhailo Yevhenovych
Назва патенту російськоюСпособ корректировки траектории свободнопадающего контейнера для доставки его в заданную точку
Автори російськоюКоврижкин Олег Георгиевич, Коваленко Игорь Анатольевич, Шмелев Михаил Евгеньевич
МПК / Мітки
Мітки: корегування, задану, точку, контейнера, доставки, траєкторії, спосіб, вільнопадаючого
Код посилання
<a href="https://ua.patents.su/3-43399-sposib-koreguvannya-traehktori-vilnopadayuchogo-kontejjnera-dlya-dostavki-jjogo-u-zadanu-tochku.html" target="_blank" rel="follow" title="База патентів України">Спосіб корегування траєкторії вільнопадаючого контейнера для доставки його у задану точку</a>
Спосіб доставки вільнопадаючого контейнера у задану точку
Номер патенту: 9414
Опубліковано: 15.09.2005
Автор: Коврижкін Олег Георгійович
Мітки: доставки, вільнопадаючого, спосіб, задану, контейнера, точку
Формула / Реферат:
Спосіб доставки вільнопадаючого контейнера у задану точку, що включає задання координат точки доставки контейнера, скидання контейнера з літального апарата, визначення поточних координат контейнера за допомогою системи супутникової навігації, який відрізняється тим, що задання координат точки доставки контейнера, а саме: географічної широти , географічної довготи
Спосіб визначення відносного положення та природної відносної траєкторії другого зближуваного космічного апарата щодо першого та пристрій для його здійснення
Номер патенту: 27739
Опубліковано: 16.10.2000
Автор: Ферро Данієль
МПК: B64G 1/24
Мітки: відносної, відносного, положення, першого, траєкторії, визначення, пристрій, космічного, апарата, спосіб, другого, здійснення, природної, зближуваного
Текст:
...если указанный первый сближающийся космический аппарат имеет значительный и известный горизонтальный размах L, измеряют соответственно значение S1 или S2 места начала указанной системы отсчета, связанной с первым сближающимся космическим аппаратом, относительно указанной точки отсчета (О), связанной со вторым сближающимся космическим аппаратом, в каждый из моментов времени t1 и 12, измеряют в каждый из моментов времени t1 и 12,...
Спосіб переміщення вершини різця по розрахунковій траєкторії та пристрій для його реалізації
Номер патенту: 52335
Опубліковано: 16.12.2002
Автор: Зіненко Володимир Миколайович
МПК: B23B 5/00
Мітки: реалізації, вершини, переміщення, спосіб, траєкторії, пристрій, різця, розрахунковій
Формула / Реферат:
1. Спосіб переміщення вершини різця по розрахунковій траєкторії, що включає установлення вершини різця в початкову точку розрахункової траєкторії, розрахунок приростів координати "У" вершини різця на дискретах розрахункової траєкторії, завдання на дискретах траєкторії переміщення вершини різця по координаті "X" розрахункових приростів координати "У" вершини різця, який відрізняється тим, що в процесі переміщення...
Спосіб налагодження резонансного нвч підсилювача на задану частоту та пристрій для його здійснення
Номер патенту: 47431
Опубліковано: 15.07.2002
Автори: Скрипник Юрій Олексійович, Іващенко Володимир Олексійович, Шевченко Костянтин Леонідович
МПК: G01R 27/32
Мітки: резонансного, частоту, налагодження, підсилювача, пристрій, спосіб, задану, нвч, здійснення
Формула / Реферат:
1. Спосіб налагодження резонансного НВЧ підсилювача на задану частоту, який полягає у формуванні двох випробувальних НВЧ сигналів з частотами, симетричними резонансній частоті за межами смуги пропускання резонатора, пропусканні випробувальних сигналів через НВЧ підсилювач, порівнянні параметрів цих сигналів між собою, формуванні різницевого сигналу, котрим регулюють власну частоту резонатора до отримання рівності порівнюваних параметрів, який...
Клапанний вузол контейнера для напою, контейнер для напою і спосіб заповнення і випорожнення контейнера
Номер патенту: 71919
Опубліковано: 17.01.2005
Автори: Тімп Піт Хейн Віллем, ван Бал Патрік Міхаель
Мітки: вузол, клапанний, контейнер, випорожнення, напою, контейнера, спосіб, заповнення
Формула / Реферат:
1. Клапанний вузол контейнера для напою, зокрема газованого напою, такого як пиво, що містить корпус, канал для напою з клапанним елементом, функціональні засоби для переміщення клапанного елемента, причому згадані функціональні засоби містять перші з’єднувальні засоби для з’єднання каналу для напою із засобами розливу напою для випорожнення контейнера через клапанний елемент або вздовж нього та другі з’єднувальні засоби для з’єднання каналу...
Попередній патент: Спосіб виготовлення гонка
Наступний патент: Спосіб фасування панчіх в упаковку
Випадковий патент: Спосіб визначення механічної міцності агрегатів ґрунту