Спосіб доставки вільнопадаючого контейнера у задану точку

Формула / Реферат
Спосіб доставки вільнопадаючого контейнера у задану точку, що включає задання координат точки доставки контейнера, скидання контейнера з літального апарата, визначення поточних координат контейнера за допомогою системи супутникової навігації, який відрізняється тим, що задання координат точки доставки контейнера, а саме: географічної широти ![]() , географічної довготи
, географічної довготи ![]() та висоти
та висоти ![]() знаходження контейнера над земним геоїдом, здійснюють за допомогою блока введення координат точки доставки контейнера з подальшою, після скидання контейнера з літального апарата, передачею їх в бортову цифрову обчислювальну машину, в яку також подаються із системи супутникової навігації поточні координати контейнера, що спускається, а саме: поточні координати географічної широти
знаходження контейнера над земним геоїдом, здійснюють за допомогою блока введення координат точки доставки контейнера з подальшою, після скидання контейнера з літального апарата, передачею їх в бортову цифрову обчислювальну машину, в яку також подаються із системи супутникової навігації поточні координати контейнера, що спускається, а саме: поточні координати географічної широти ![]()
![]() , географічної довготи
, географічної довготи ![]() і висоти
і висоти ![]() знаходження контейнера над земним геоїдом, та із датчика кутової швидкості сигнал про зміну кутової швидкості обертання контейнера
знаходження контейнера над земним геоїдом, та із датчика кутової швидкості сигнал про зміну кутової швидкості обертання контейнера ![]() ,
,![]() при цьому за допомогою бортової цифрової обчислювальної машини на підставі значень заданих координат точки доставки контейнера
при цьому за допомогою бортової цифрової обчислювальної машини на підставі значень заданих координат точки доставки контейнера ![]() ,
, ![]() ,
, ![]() і поточних координат контейнера
і поточних координат контейнера ![]() ,
, ![]() ,
, ![]() з урахуванням сигналу про зміну кутової швидкості контейнера
з урахуванням сигналу про зміну кутової швидкості контейнера ![]() формується сигнал управління рулями контейнера, що спускається, який подається в блок управління аеродинамічними рулями, і при досягненні значення поточної висоти
формується сигнал управління рулями контейнера, що спускається, який подається в блок управління аеродинамічними рулями, і при досягненні значення поточної висоти ![]() знаходження контейнера над земним геоїдом, рівного заданому
знаходження контейнера над земним геоїдом, рівного заданому ![]() , подається сигнал на відкривання парашута.
, подається сигнал на відкривання парашута.
Текст
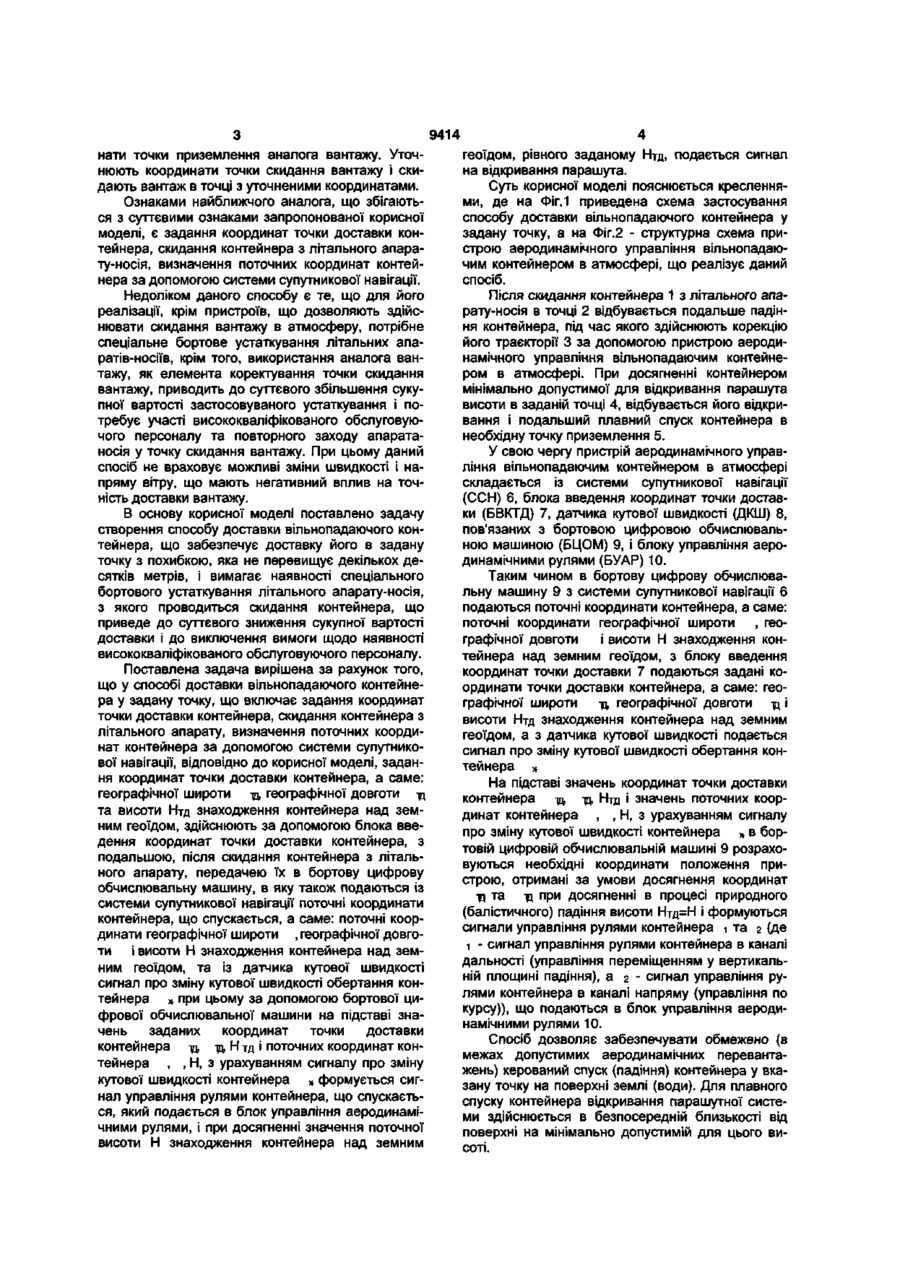
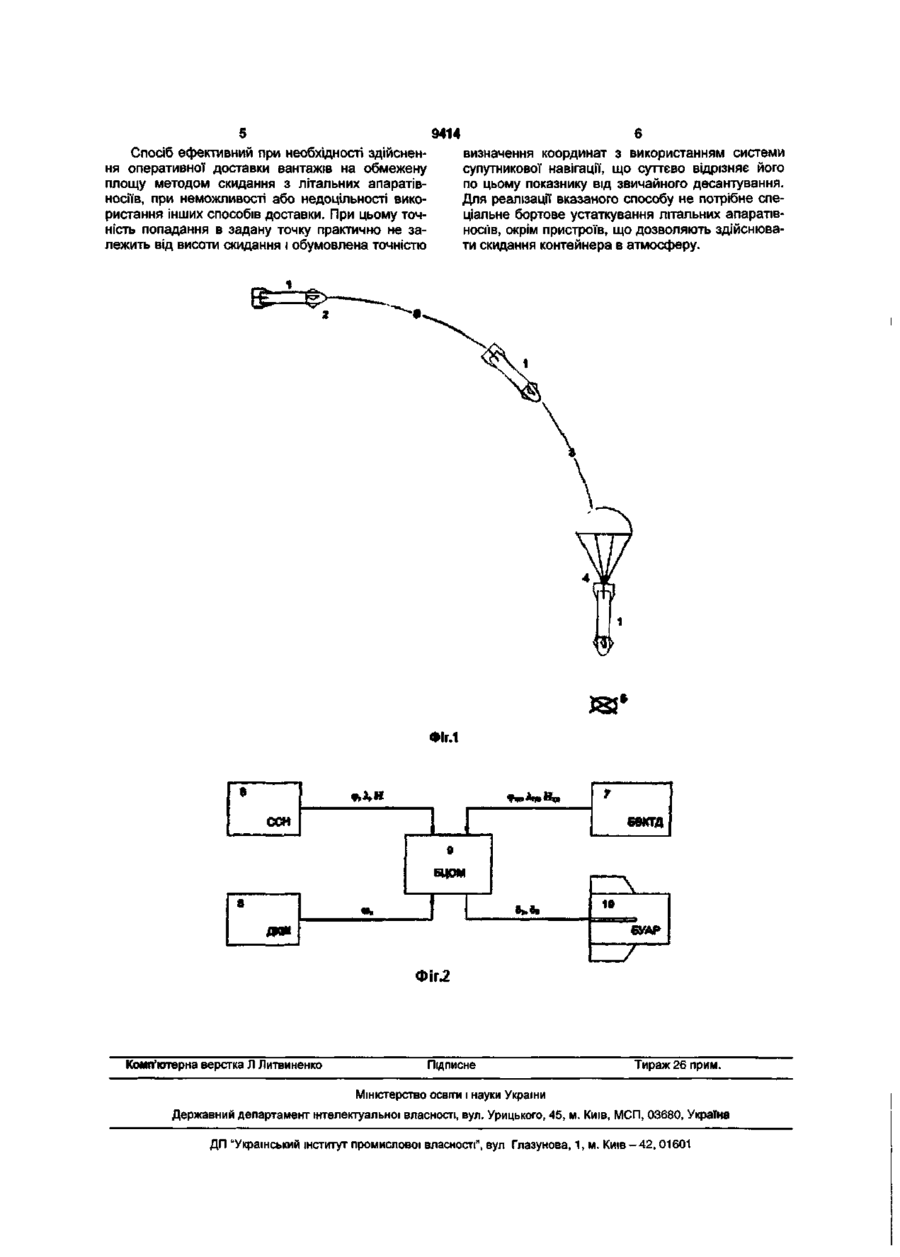
Спосіб доставки вільнопадаючого контейнера у задану точку, що включає задания координат точки доставки контейнера, скидання контейнера з літального апарата, визначення поточних координат контейнера за допомогою системи супутникової навігації, який відрізняється тим, що задания координат точки доставки контейнера, а саме: географічної широти сртд, географічної довготи Худ та висоти Нуд знаходження контейнера над земним геоїдом, здійснюють за допомогою блока введення координат точки доставки контейнера з подальшою, після скидання контейнера з літального апарата, передачею їх в бортову цифрову обчислювальну машину, в яку також подаються із системи супутникової навігації поточні координати контейнера, що спускається, а саме: поточні координати географічної широти ЧТД ' поточних координат контейнера ф, X, Н з урахуванням сигналу про зміну кутової швидкості контейнера «х формується сигнал управління рулями контейнера, що спускається, який подається в блок управління аеродинамічними рулями, і при досягненні значення поточної висоти Н знаходження контейнера над земним геоїдом, рівного заданому Нуд, подається сигнал на відкривання парашута. со Корисна модель відноситься до авіаційної техніки, зокрема до способів управління коректованими літальними апаратами, задачею яких є доставка з підвищеною точністю корисного вантажу з літака-носія у задану точку. Широко відомі способи десантної доставки вантажів з використанням парашутів. До недоліків цих систем відноситься те, що вони мають низьку точність через великий вплив вітру на всій ділянці спуску вантажу, а також вимагають наявності спеціальних прицільних систем десантування, що враховують швидкість і напрям вітру та поточні значення швидкості вантажу, що вимагає використання спеціальних літаків і устаткування. Також відомі способи десантної доставки вантажів з використанням витяжних парашутів. Проте забезпечення більш високої точності в цьому випадку досягається за рахунок більш низької точки скидання вантажу над землею, що робить вживан ня цього способу неможливим, наприклад, в гірській та лісовій місцевості. Найбільш близьким аналогом заявленої корисної моделі є спосіб прицільного скидання вантажу з літального апарата-носія [патент Російської Федерації RU 2220883, МПК B64D1/02, 1/04, F41G3/22, опубл. 10.01.2004]. Спосіб полягає в тому, що заздалегідь задають координати точки доставки вантажу і по них визначають координати точки скидання вантажу в штильових умовах при стандартних параметрах атмосфери. Далі виводять літальний апарат-носій, оснащений бортовим обчислювачем і бортовою апаратурою супутникової навігації, в розраховану для штильових умов точку скидання вантажу. Після цього з літального апарату-носія скидають аналог вантажу, оснащений апаратурою супутникової навігації і приймачем-передавачем, що транслює сигнали на борт літального апарату-носія. За допомогою системи супутникової навігації визначають поточні координати аналога вантажу і коорди 0) 5Г 9414 нати точки приземлення аналога вантажу. Уточнюють координати точки скидання вантажу і скидають вантаж в точці з уточненими координатами. Ознаками найближчого аналога, що збігаються з суттєвими ознаками запропонованої корисної моделі, є задания координат точки доставки контейнера, скидання контейнера з літального апарату-носія, визначення поточних координат контейнера за допомогою системи супутникової навігації. Недоліком даного способу є те, що для його реалізації, крім пристроїв, що дозволяють здійснювати скидання вантажу в атмосферу, потрібне спеціальне бортове устаткування літальних апаратів-носіїв, крім того, використання аналога вантажу, як елемента коректування точки скидання вантажу, приводить до суттєвого збільшення сукупної вартості застосовуваного устаткування і потребує участі висококваліфікованого обслуговуючого персоналу та повторного заходу апаратаносія у точку скидання вантажу. При цьому даний спосіб не враховує можливі зміни швидкості і напряму вітру, що мають негативний вплив на точність доставки вантажу. В основу корисної моделі поставлено задачу створення способу доставки вільнопадаючого контейнера, що забезпечує доставку його в задану точку з похибкою, яка не перевищує декількох десятків метрів, і вимагає наявності спеціального бортового устаткування літального апарату-носія, з якого проводиться скидання контейнера, що приведе до суттєвого зниження сукупної вартості доставки і до виключення вимоги щодо наявності висококваліфікованого обслуговуючого персоналу. Поставлена задача вирішена за рахунок того, що у способі доставки вільнопадаючого контейнера у задану точку, що включає задания координат точки доставки контейнера, скидання контейнера з літального апарату, визначення поточних координат контейнера за допомогою системи супутникової навігації, відповідно до корисної моделі, задания координат точки доставки контейнера, а саме: географічної широти - , географічної довготи щ щ та висоти Нтд знаходження контейнера над земним геоїдом, здійснюють за допомогою блока введення координат точки доставки контейнера, з подальшою, після скидання контейнера з літального апарату, передачею їх в бортову цифрову обчислювальну машину, в яку також подаються із системи супутникової навігації поточні координати контейнера, що спускається, а саме: поточні координати географічної широти , географічної довготи і висоти Н знаходження контейнера над земним геоїдом, та із датчика кутової швидкості сигнал про зміну кутової швидкості обертання контейнера * при цьому за допомогою бортової цифрової обчислювальної машини на підставі значень заданих координат точки доставки контейнера щ, -д, Н тд і поточних координат контейнера , , Н, з урахуванням сигналу про зміну кутової швидкості контейнера * формується сигнал управління рулями контейнера, що спускається, який подається в блок управління аеродинамічними рулями, і при досягненні значення поточної висоти Н знаходження контейнера над земним 4 геоїдом, рівного заданому Нтд, подається сигнал на відкривання парашута. Суть корисної моделі пояснюється кресленнями, де на Фіг.1 приведена схема застосування способу доставки вільнопадаючого контейнера у задану точку, а на Фіг.2 - структурна схема пристрою аеродинамічного управління вільнопадаючим контейнером в атмосфері, що реалізує даний спосіб. Після скидання контейнера 1 з літального апарату-носія в точці 2 відбувається подальше падіння контейнера, під час якого здійснюють корекцію його траєкторії 3 за допомогою пристрою аеродинамічного управління вільнопадаючим контейнером в атмосфері. При досягненні контейнером мінімально допустимої для відкривання парашута висоти в заданій точці 4, відбувається його відкривання і подальший плавний спуск контейнера в необхідну точку приземлення 5. У свою чергу пристрій аеродинамічного управління вільнопадаючим контейнером в атмосфері складається із системи супутникової навігації (ССН) 6, блока введення координат точки доставки (БВКТД) 7, датчика кутової швидкості (ДКШ) 8, пов'язаних з бортовою цифровою обчислювальною машиною (БЦОМ) 9, і блоку управління аеродинамічними рулями (БУАР) 10. Таким чином в бортову цифрову обчислювальну машину 9 з системи супутникової навігації 6 подаються поточні координати контейнера, а саме: поточні координати географічної широти , географічної довготи і висоти Н знаходження контейнера над земним геоїдом, з блоку введення координат точки доставки 7 подаються задані координати точки доставки контейнера, а саме: географічної широти -д, географічної довготи -д і висоти Нтд знаходження контейнера над земним геоїдом, а з датчика кутової швидкості подається сигнал про зміну кутової швидкості обертання контейнера * На підставі значень координат точки доставки контейнера -д, -д Нтд і значень поточних координат контейнера , , Н, з урахуванням сигналу про зміну кутової швидкості контейнера » в бортовій цифровій обчислювальній машині 9 розраховуються необхідні координати положення пристрою, отримані за умови досягнення координат • та -д при досягненні в процесі природного д (балістичного) падіння висоти Нтд=Н і формуються сигнали управління рулями контейнера і та г (де і - сигнал управління рулями контейнера в каналі дальності (управління переміщенням у вертикальній площині падіння), а 2 - сигнал управління рулями контейнера в каналі напряму (управління по курсу)), що подаються в блок управління аеродинамічними рулями 10. Спосіб дозволяє забезпечувати обмежено (в межах допустимих аеродинамічних перевантажень) керований спуск (падіння) контейнера у вказану точку на поверхні землі (води). Для плавного спуску контейнера відкривання парашутної системи здійснюється в безпосередній близькості від поверхні на мінімально допустимій для цього висоті. 9414 Спосіб ефективний при необхідності здійснення оперативної доставки вантажів на обмежену площу методом скидання з літальних апаратівносіїв, при неможливості або недоцільності використання інших способів доставки. При цьому точність попадання в задану точку практично не залежить від висоти скидання і обумовлена точністю визначення координат з використанням системи супутникової навігації, що суттєво відрізняє його по цьому показнику від звичайного десантування. Для реалізації вказаного способу не потрібне спеціальне бортове устаткування літальних апаратівносґів, окрім пристроїв, що дозволяють здійснювати скидання контейнера в атмосферу. JS?» ФІГ.1 Г сен евкгд і 9 БЦОМ
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for delivery of free-falling container into given point
Автори англійськоюKovryzhkin Oleh Heorhiiovych
Назва патенту російськоюСпособ доставки свободнопадающего контейнера в заданную точку
Автори російськоюКоврижкин Олег Георгиевич
МПК / Мітки
Мітки: спосіб, доставки, контейнера, задану, точку, вільнопадаючого
Код посилання
<a href="https://ua.patents.su/4-9414-sposib-dostavki-vilnopadayuchogo-kontejjnera-u-zadanu-tochku.html" target="_blank" rel="follow" title="База патентів України">Спосіб доставки вільнопадаючого контейнера у задану точку</a>
Клапанний вузол контейнера для напою, контейнер для напою і спосіб заповнення і випорожнення контейнера
Номер патенту: 71919
Опубліковано: 17.01.2005
Автори: Тімп Піт Хейн Віллем, ван Бал Патрік Міхаель
Мітки: контейнера, заповнення, клапанний, випорожнення, напою, вузол, спосіб, контейнер
Формула / Реферат:
1. Клапанний вузол контейнера для напою, зокрема газованого напою, такого як пиво, що містить корпус, канал для напою з клапанним елементом, функціональні засоби для переміщення клапанного елемента, причому згадані функціональні засоби містять перші з’єднувальні засоби для з’єднання каналу для напою із засобами розливу напою для випорожнення контейнера через клапанний елемент або вздовж нього та другі з’єднувальні засоби для з’єднання каналу...
Спосіб ліофілізації та герметизації продукту, який упорскується, вузол контейнера, пристрій контейнера та голчастого шприца
Номер патенту: 27970
Опубліковано: 16.10.2000
Автор: Гарріс Дейл
МПК: A61M 5/00, A61M 37/00, A61B 19/00
Мітки: продукту, контейнера, голчастого, герметизації, вузол, упорскується, шприца, ліофілізації, спосіб, пристрій
Текст:
...литьем под давлением, хотя можно применять другие соответствующие материалы с колпачком, изготовленным соответственно Колпачок 20 имеет цилиндрическую нижнюю часть, или юбку, 22 с данной осевой длиной и внутренним радиусом, достаточным, чтобы располагаться вокруг по меньшей мере части цилиндрического контейнера для лиофилизации. Как будет дальше описано, нижняя часть, или юбка, 22 стабилизиру ет коппачок 20, когда он находится на...
Спосіб ініціювання самопливної доставки закладного матеріалу
Номер патенту: 29819
Опубліковано: 15.11.2000
Автор: Перепелиця Валентин Григорович
МПК: E21F 15/08
Мітки: доставки, ініціювання, матеріалу, спосіб, закладного, самопливної
Текст:
...горизонтальної ділянки вмикають пневмопульсацію. Момент досягнення транспортуємим матеріалом горизонтальної ділянки вібровпливу визначають розрахунковим шляхом, виходячи із відомих швидкості руху суміші і відстані до зазначеної ділянки. Пневмопульсаційний вплив здійснюють безперервно на протязі усього процесу доставки матеріалу, вимикаючись у випадках технологічної необхідності після очистки всього трубопроводу від транспортуємого...
Контейнер, спосіб і пристрій виготовлення контейнера, а також спосіб і пристрій наповнення контейнера
Номер патенту: 57131
Опубліковано: 16.06.2003
Автори: Моссберг Ульф, Шехольм Йохан
МПК: B65B 3/04, B31B 1/74, B65B 1/04, B65D 33/36, B65D 30/10
Мітки: також, контейнера, наповнення, спосіб, контейнер, виготовлення, пристрій
Формула / Реферат:
1. Контейнер для рідкого або порошкоподібного вмісту, що містить стінки, які сполучені між собою таким чином, що утворюють закриту камеру, причому дві протилежні бічні стінки сполучені вздовж загальної з'єднувальної ділянки, причому контейнер має канальний засіб, який утворений між двома бічними стінками і проходить від камери до зовнішньої сторони контейнера, який відрізняється тим, що стінки є гнучкими, так що об'єм камери залежить від...
Спосіб виготовлення оболонки контейнера, спосіб виготовлення контейнера, оболонка, контейнер і спосіб зберігання
Номер патенту: 61996
Опубліковано: 15.12.2003
Автори: Андерссон Клаес-Йєран, Філдінг Петер Бернард, Ніколас Едвард Девід, Хедман Томмі
МПК: B23K 20/12
Мітки: зберігання, контейнера, контейнер, виготовлення, спосіб, оболонки, оболонка
Формула / Реферат:
1. Спосіб виготовлення корозійно стійкої оболонки контейнера для радіоактивних матеріалів, при якому зварюють одна з одною за допомогою тертя щонайменше дві секції з міді або мідного сплаву.2. Спосіб за п. 1, який відрізняється тим, що зварюють одна з одною за допомогою тертя всі секції оболонки.3. Спосіб за пп. 1 або 2, який відрізняється тим, що в оболонці передбачають отвір, виконаний з можливістю завантаження через нього...
Попередній патент: Система керування параметрами організації
Наступний патент: Пристрій для одержання газомеханічної піни
Випадковий патент: 8-заміщені бензоазепіни як модулятори toll-подібного рецептора