Пристрій для вимірювання параметрів змінних магнітних полів
Номер патенту: 43731
Опубліковано: 25.08.2009



Формула / Реферат
Пристрій для вимірювання параметрів змінних магнітних полів, що містить резистивний дільник та вимірювальну котушку, навантажену на інвертуючий підсилювач, вихід якого через перший резистор з'єднано з його інвертуючим входом, при цьому його неінвертуючий вхід підсилювача приєднано до середньої точки резистивного дільника, другий вихід одного із резисторів підключено до виходу підсилювача, а другий кінець другого резистора - до спільної шини, причому співвідношення величин резисторів пліч дільника менше співвідношення величин внутрішнього активного опору вимірювальної котушки до величини першого резистора, який відрізняється тим, що додатково містить послідовно з'єднані блоки широкосмугових фільтрів, блок узгоджуючого підсилювача, блок вихідного підсилювача, блок керуючого резистивного дільника та блок індикатора, підключені до виходу підсилювача, блок керування, перший, другий, третій, четвертий виходи якого підключено відповідно до керуючих входів блоків широкосмугових фільтрів, узгоджуючого підсилювача, індикатора та керуючого резистивного дільника, котрий виконано у вигляді магазина резисторів, вихід якого підключено до неінвертуючого входу підсилювача та через зразковий резистор - до спільної шини.
Текст
Пристрій для вимірювання параметрів змінних магнітних полів, що містить резистивний дільник та вимірювальну котушку, навантажену на інвертуючий підсилювач, вихід якого через перший резистор з'єднано з його інвертуючим входом, при цьому його неінвертуючий вхід підсилювача приєднано до середньої точки резистивного дільника, другий вихід одного із резисторів підключено до виходу підсилювача, а другий кінець другого рези 3 блок індикатора, підключені до виходу підсилювача, блок керування, перший, другий, третій, четвертий вихід якого підключено відповідно до керуючих входів блоків широкополосних фільтрів, узгоджуючого підсилювача, індикатора та керуючого резистивного дільника, котрий виконано у вигляді магазина резисторів, вихід якого через зразковий резистор підключений до спільної шини, вихід якого підключено до неінвертуючого входу підсилювача та через зразковий резистор до неінвертируючого входу підсилювача. На Фіг. представлена функціональна блоксхема пристрою для вимірювання змінних магнітних полів, що пропонується. Пристрій для вимірювання змінних магнітних полів має вимірювальну безферітну котушку 1, підсилювач 2, перший резистор 3, другий резистор 4, третій резистор 5, четвертий резистор 6, блок керування 7 (БК), блок широкополосних фільтрів 8 (БШФ), блок узгоджуючого підсилювача 9 (БУП), блок вихідного підсилювача 10 (БВП), блок керуючого резистивного дільника 11 (БКРД), блок індикатора 12 (БІ), зразковий резистор 13. Розглянемо роботу пристрою для вимірювання змінних магнітних полів. Вимірювальна котушка (R ) 1, яка має внутрішній активний опір 6 0 , навантажена на підсилювач 2. Використовується інвертуючий (-) вхід підсилювача з ціллю отримання меншого вхідного опору. Підсилювач охоплений від'ємним зворотнім зв'язком через перший резис(R ) тор 3 1 . Вхідний опір підсилювача R Rвх = 1 (1.1) K1 , K де 1 - коефіцієнт підсилення підсилювача 2, без зворотнього зв'язку. Постійна часу вимірювальної котушки складає L t1 = (1.2) R, де L - індуктивність безферітної котушки 1, а R R = R0 + Rвх = R0 + 1 (1.3) K1 . Мета корисної моделі - звести значення постійної часу до мінімального значення, це значно розширить частотний діапазон вимірювального пристрою. Ця задача вирішується за рахунок введення додаткових блоків керування 7, широкополосних фільтрів 8, узгоджуючого підсилювача 9, вихідного підсилювача 10, блок керуючого резистивного дільника 11, індикатора 12 їх взаємозв'язку приводить до ефективної роботи позитивного зворотнього зв'язку, що подається із зразкового резистора 13 на неінвертований вхід, через резистивний дільник значення активного опору якого дорівнює (R 2 ´ R зраз ) / R3 ´ (R2 + R зраз ) , (1.4) R активний дільник утворений другим 2 4, зраR зковим зраз 13 і третім R3 5 резисторами, які еквівалентні введенню в його вхідний ланцюг 43731 4 Rвід від’ємного опору . R 2 ´ R зраз / R3 ´ R2 + Rзраз ( ) ( Співвідношення ) підбирається таким чином, щоб виконувалося рівняння Rвід = R0 + де R2 ´ Rзраз R1 + + DR K1 R2 + Rзраз ´ R3 ´ K ДП + КВП [( ) ]( ) , (1.5) K ДП - коефіцієнт підсилення узгоджуючого підсилювача 9, КВП - коефіцієнт підсилення вихідного підсилювача 10, DR - деяка мала величина. Тоді сумарно активний опір ланцюгу вимірювальної котушки - вхід підсилювача, R R = R0 + 1 - Rвід = DR (1.6) K1 та постійна часу інтегрування вимірювальної котушки, L t1 = (1.7) DR що дає можливість змінювати опір в широкому 1 t1 = 2pfi забездіапазоні, тоді при постійній часу печується нормальна робота інтегратора в широкому діапазону частот в плоть до нижньої границі частоти fi . На виході цепочки - вихідного підсилювачу 10 - напруга являється інтегралом напруги, наведеного в вимірювальної котушці 1. Яка пропорційна похідній від вимірювального значення маг¶B ¶B нітної індукції ¶t . Інтеграл від ¶t є значення індукції магнітного поля B(t). Для досягнення сталості роботи схеми, виключення випадкового збудження, необхідно виконання умови R 2 ´ Rзраз R á 0. R2 + R зраз ´ R3 ´ K ДП + КВП R1 [( ) ] ( ) (1.8) Найбільше приближення відношення значення R2 ´ Rзраз R0 (R2 + Rзраз )´ R3 ´ (K ДП + КВП ) до R1 дає максима [ ] льне зниження нижньої граничної частоти вимірювального тракту. Таким чином, завдяки введенню блоків їх взаємозв'язку, нижня межа частоти може вимірюватися від сотої долі Гц до 100кГц. Сигнал з підсилювача 2 потрапляє до блоку широкополосних фільтрів 8 (БШФ), де фільтрується та йде на блок узгоджую чого підсилювача 9 (БУП), де отриманий сигнал узгоджується та потрапляє до блоку вихідного підсилювача 10 (БВП). У блоці БВП сигнал підсилюється та потрапляє до блоку керуючого резистивного дільника 11 (БКРД), котрий виконано у вигляді магазину резисторів з'єднаних із зразковим резистором 13, підключеним до спільної шини, а другим кінцем до неінвертуючего входу підсилювача 2. З БКРД сигнал потрапляє до блоку індикатора 12 (БІ), який індукує значення вимірюваного сигналу магнітної індукції. Блок керування (БК) підключено першим виходом до БШФ, завдяки БК проводиться установка діапазону, який треба пропустити крізь БШФ і автоматична настройка другим виходом БК, який підключено до БУП, в якому проводиться узгодження 5 43731 сигналу отриманого з БШФ. Третій вихід БК підключено до БІ, завдяки даному зв'язку ми можемо установити, який по величині сигнал посилається. Четвертий вихід БК підключено до БКРД, цей зв'язок призначений для автоматичної настройки системи, а саме для врівноваження поміх створюваних приладом. Сигнал із зразкового резистора R зраз поступає на вхід підсилювача, забезпечуючи зворотний зв'язок вихідного сигналу з вхідним. Комп’ютерна верстка Л. Купенко 6 Таким чином завдяки введенню додаткових блоків (перерахувати) взаємодії їх зв'язками досягається значне розширення частотного діапазону від інфранизьких до високих частот, підвищення стабільності, за рахунок позитивного і від'ємного зворотнього зв'язку та однозначність отриманого значення магнітної індукції в вимірювальному тракті за рахунок узгодження сигналу з блоку керування. Підписне Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for measurement of parameters of varying magnetic fields
Автори англійськоюTereschenko Mykola Fedorovych, Lytkyn Ihor Mykhailovych
Назва патенту російськоюУстройство для измерения параметров переменных магнитных полей
Автори російськоюТерещенко Николай Федорович, Литкин Игорь Михайлович
МПК / Мітки
МПК: G01R 33/00
Мітки: змінних, пристрій, магнітних, вимірювання, параметрів, полів
Код посилання
<a href="https://ua.patents.su/3-43731-pristrijj-dlya-vimiryuvannya-parametriv-zminnikh-magnitnikh-poliv.html" target="_blank" rel="follow" title="База патентів України">Пристрій для вимірювання параметрів змінних магнітних полів</a>
Пристрій для вимірювання квазістатичних магнітних полів
Номер патенту: 15239
Опубліковано: 30.06.1997
Автори: Калінін Сергій Вікторович, Нестеров Володимир Вікторович, Курносіков Олег Володимирович, Банщіков Олександр Іванович, Грошенко Микола Олександрович
МПК: G01R 33/32
Мітки: полів, квазістатичних, вимірювання, магнітних, пристрій
Формула / Реферат:
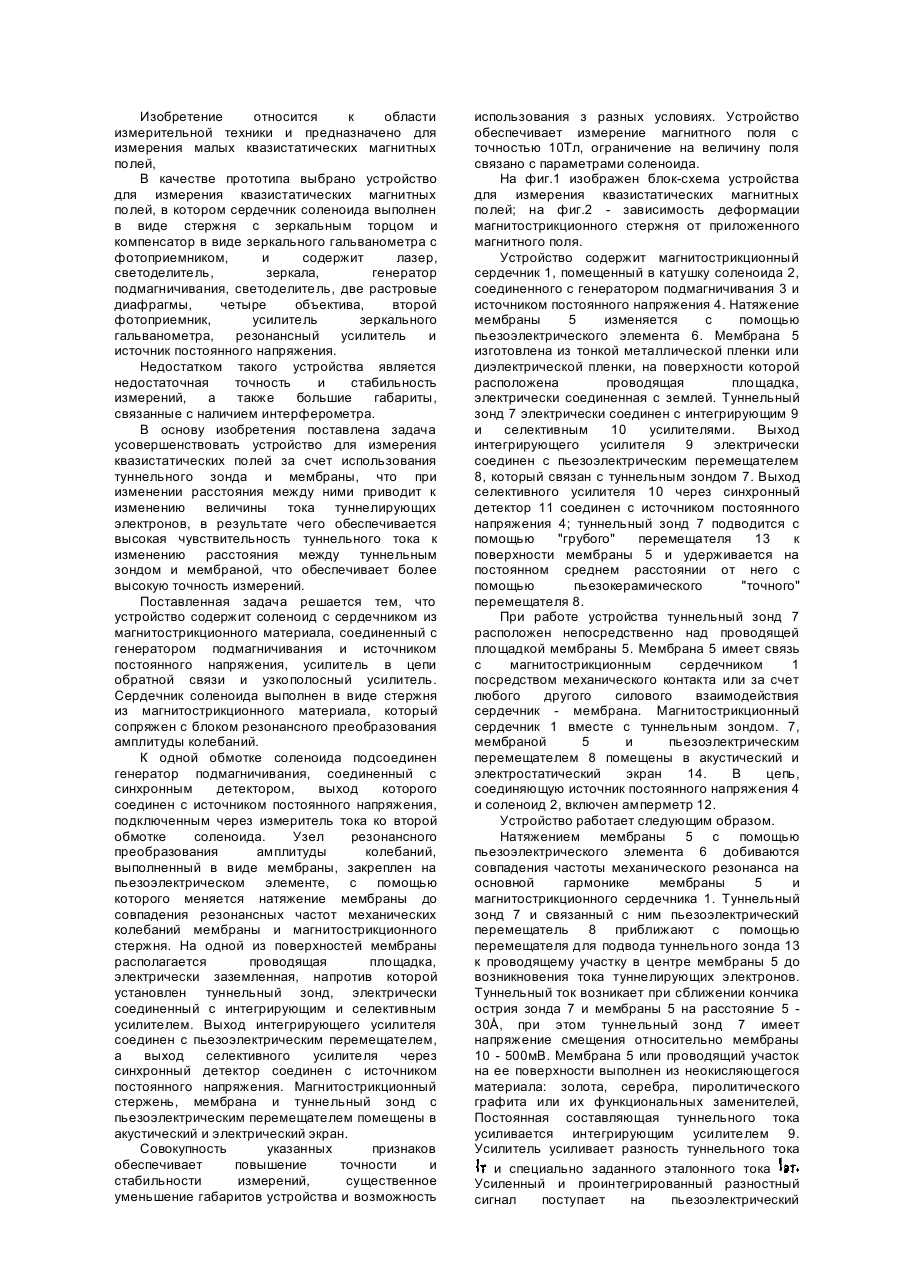
1. Устройство для измерения квазистатических магнитных полей, включающее соленоид с сердечником из магнитострикционного материала, соединенный с генератором подмагничивания и источником постоянного напряжения, и резонансный усилитель, отличающееся тем, что дополнительно содержит блок резонансного преобразования, амплитуды колебаний, состоящий из мембраны, закрепленной на пьезокерамическом кольце и сопряженной с магнитострикционным сердечником...
Пристрій для вимірювання квазістатичних магнітних полів
Номер патенту: 25908
Опубліковано: 26.02.1999
Автори: Нєстєров Володимир Вікторович, Курносіков Олег Володимирович, Банщіков Олександр Іванович, Грошенко Микола Олександрович, Карт Олександр Маркович
МПК: G01R 33/18, G01R 33/12
Мітки: вимірювання, магнітних, полів, квазістатичних, пристрій
Формула / Реферат:
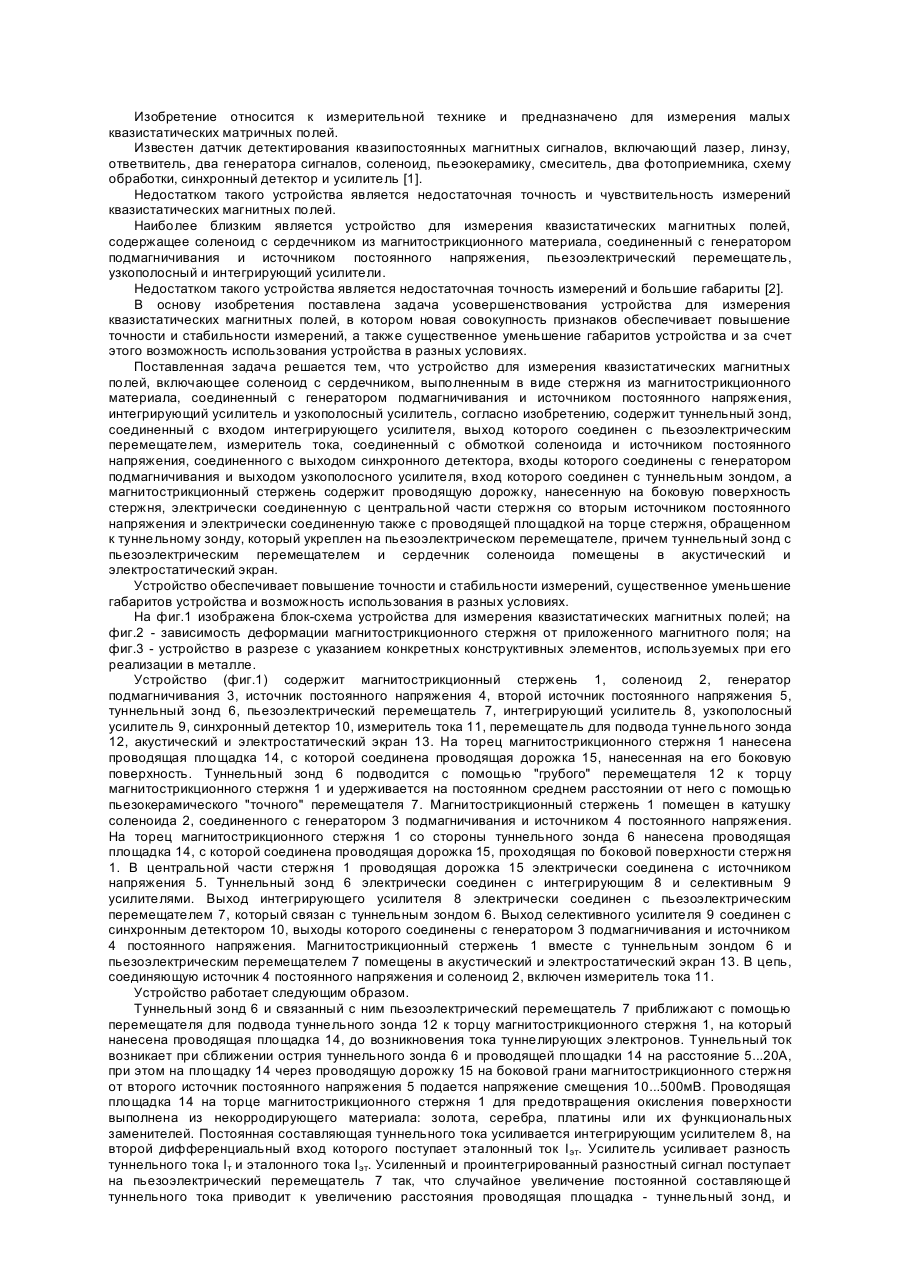
Устройство для измерения квазистатических магнитных полей, включающее соленоид с сердечником, выполненным в виде стержня из магнитострикционного материала, соединенный с генератором подмагничивания и источником постоянного напряжения, интегрирующий усилитель и узкополосный усилитель, отличающееся тем, что оно содержит туннельный зонд, соединенный с входом интегрирующего усилителя, выход которого соединен с пьезоэлектрическим перемещателем,...
Спосіб відбору тварин з підвищеною чутливістю до впливу слабких змінних магнітних полів наднизької частоти для дослідження в експериментах в галузі біофізики та космічної біології

Номер патенту: 3279
Опубліковано: 27.12.1994
Автори: Темурьянц Наталія Арменакіївна, Макєєв Валерій Борисович, Грабовська Олена Юр'ївна
МПК: C12Q 1/32, C12N 9/02, C12N 9/04, A61B 5/05, G01N 1/30, G01N 21/00
Мітки: частоти, біології, магнітних, експериментах, полів, слабких, чутливістю, підвищеною, біофізики, відбору, галузі, космічної, тварин, дослідження, впливу, змінних, наднизької, спосіб
Формула / Реферат:
Способ отбора животных с повышенной чувствительностью к действию переменных магнитных полей сверхнизкой частоты для исследования в экспериментах в области биофизики и космической биологи путем цитохимического определения в лимфоцитах периферической крови активности сукцинат- и альфа-глицерофосфат-дегидрогеназы и при значении первого показателя 24,0-29,0 гранул формазана и второго 17,0-22,0 гранул формазана осуществляют отбор животных с...
Пристрій для знищення магнітних полів
Номер патенту: 62765
Опубліковано: 15.12.2003
Автор: Тюріков Василь Опанасович
МПК: G12B 17/00
Мітки: знищення, полів, пристрій, магнітних
Формула / Реферат:
1. Пристрій для знищення магнітних полів, що має корпус, який відрізняється тим, що корпус виконаний у вигляді металевого рівностороннього трикутника, сторони якого в розрізі Г-подібного профілю і дорівнюють 450±5 мм.2. Пристрій за п. 1, який відрізняється тим, що сторони трикутника виконані з косинців металевого прокату з полицями 40х40 мм.
Пристрій для генерування магнітних полів
Номер патенту: 33203
Опубліковано: 15.02.2001
Автори: Філіпов Юрій Олександрович, Привалов Володимир Миколайович, Філіпова Олександра Юрійовна, Руденко Анатолій Іванович, Путілов Юрій Григорович, Соколовський Іван Івановіч, Житник Микола Явтухович
МПК: A61N 2/08
Мітки: полів, пристрій, магнітних, генерування
Текст:
...повільно - виводити швидко, якщо відстань між скошеною поверхнею рухомого магніта і біооб'єктом зменшується, починаючи з максимального значення при повороті диска. Напружність магнітного поля в указаному проміжку зростає повільно до максимального значення, після чого напружність стрибкоподібно знижується до мінімальної. При зворотному ході привода напружність магнітного поля від максимальної плавно знижується до мінімальної, тобто графічно...
Попередній патент: Інтерферометр для контролю форми поверхонь оптичних деталей
Наступний патент: Комбінований спосіб нанесення дифузійних покриттів
Випадковий патент: Маніпулятор