Маніпулятор
Номер патенту: 188
Опубліковано: 30.04.1993
Автори: Мілушин Тимофій Тимофійович, Шумейко Дмитро Іванович, Кравчун Степан Іванович
Формула / Реферат
Формула изобретения
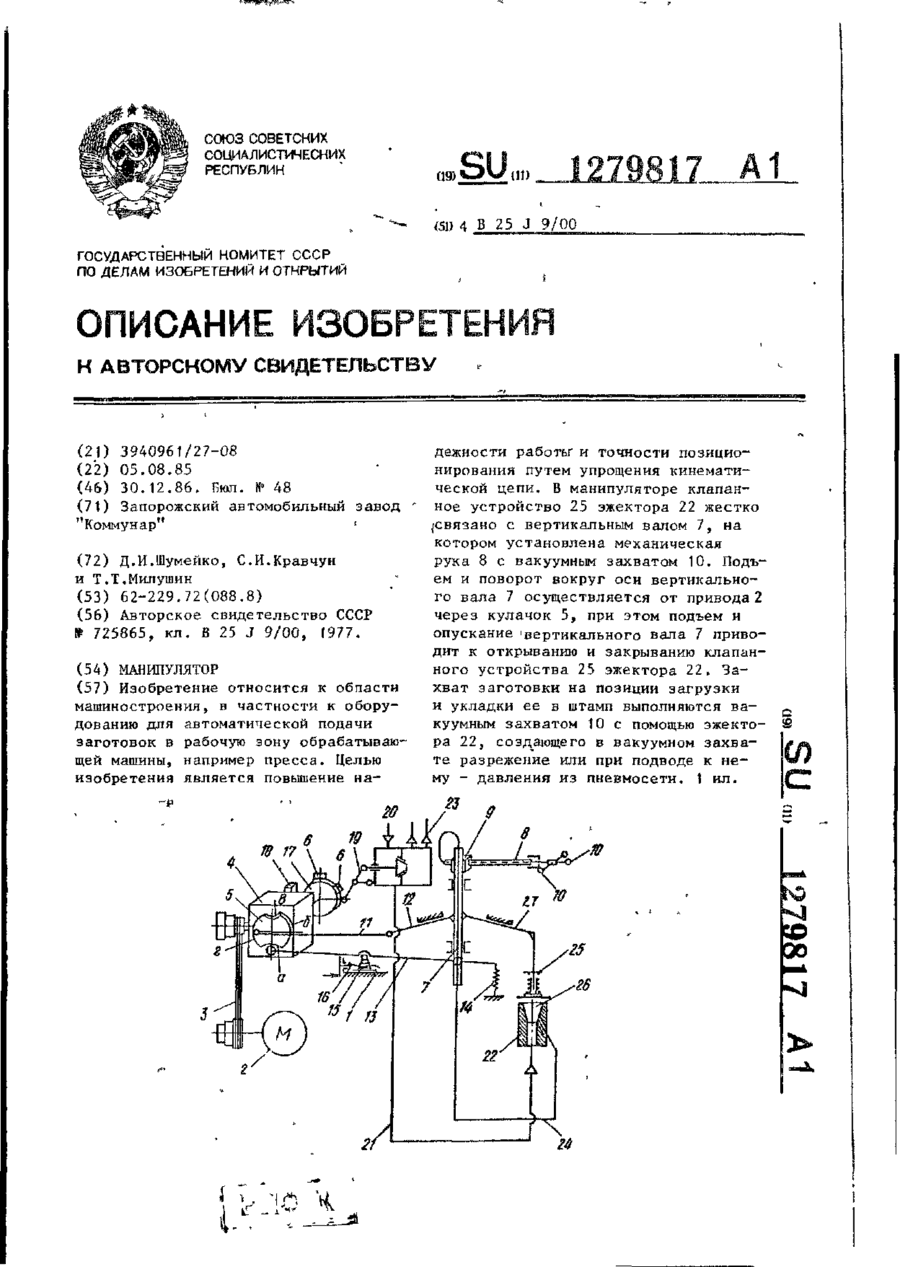
Манипулятор, содержащий механическую руку с пневматическими захватными органами, установленную на вертикальном валу, связанном посредством рычажной системы, с приводом ее подъема и поворота, кулачки, закрепленные на валу редуктора и взаимодействующие с пневмоклапаном, связанным трубопроводом с пневматическими механизмами, и эжектор с клапанным устройством, связанный трубопроводом с пневматическими захватными органами, отличающийся тем, что, с целью повышения надежности и точности позиционирования, клапанное устройство эжектора жестко связано с вертикальным валом посредством дополнительно введенной тяги, при этом ось эжектора параллельна оси вертикального вала.
Текст
Изобретение относится к обпасти машиностроения, в частности к оборудованию для автоматической подачи заготовок в рабочую зону обрабатывающей машины, например пресса. Целью изобретения является повышение на дежности работы и точности позиционирования путем упрощения кинематической цепи. В манипуляторе клапанное устройство 25 эжектора 22 жестко ^связано с вертикальным валом 7, на котором установлена механическая рука 8 с вакуумным захватом 10. Подъем и поворот вокруг оси вертикального вала 7 осуществляется от привода 2 через кулачок 5, при этом подъем и опускание 'вертикального вала 7 приводит к открыванию и закрыванию клапанного устройства 25 эжектора 22. Захват заготовки на позиции загрузки и укладки ее в штамп выполняются вакуумным захватом 10 с помощью эжектора 22, создающего в вакуумном захвате разрежение или при подводе к нему - давления из пневмосети. 1 ил. С. 1 79817 2 Изобретение относится к машиноПолость разрежения эжектора 22 строению, в частности к технологичеструбопроводом 24, проложенным внутри кому оборудованию для автоматической вертикального вала 7 и механической подачи заготовок в рабочую чону обраруки 8, соединена с захватными оргабатывающей машины, например пресса. 5 нами 10, клапанное устройство эжекЦелью изобретения является повытора 22 выполнено в виде подпружиненшение надежности работы и точности ного тарельчатого клапана 25, перепозиционирования путем упрощения кикрывающего выходное отверстие 26 нематической цепи. эжектора, и жестко закреплено с по10 мощью тяги 27 с вертикальным валом 7, На чертеже изображена кинематипри этом ось эжектора параллельна ческая схема манипулятора. оси вертикального вала 7. Манипулятор содержит корпус 1, на котором установлен привод (двигатель) Манипулятор работает следующим 2, соединенный чере з передачу, наобразом. пример многоручъевую ременную переІ5 В исходном состоянии механическая дачу 3, с редуктором 4. G обеих сторука 8 установлена на позиции загрузрон редуктора 4 смонтированы кулачки, и захватные органы, например ваки 5 и 6, причем кулачок 5 связан куумный захват 10, находятся в конрычажной системой с вертикальным ватакте с обрабатываемой заготовкой. лом 7. На верхнем выходном конце вер- 20 Сжатый воздух по трубопроводу 20 тикального вала 7 установлена механиподается в левую полость пневмокла- ^ ческая рука 8, закрепленная на нем пана 19 и по трубопроводу 21 - в с помощью зажима 9 и снабженная пневэжектор 22, где через выходное отматическими разборными захватными верстие 26 выходит в атмосферу, созорганами 10, выполненными в виде, 25 давая при этом разрежение, которое например, вакуумного захвата. Рычажпо трубопроводу 24 поступает к вакуная система представлена шатуном 11, умному захвату 10. В результате завзаимодействующим с кулачком 5 и шарготовка закреплена в нужном положенирно связанным с рычагом 12, и двунии на захвате 10. плечим рычагом 13, причем рычаги 12 30 Штамп пресса раскрыт и подготови 13 соединены с вертикальным валом 7 лен для установки на нем обрабатываесоответственно жестко и шарнирно. мой заготовки (не показан). Свободный конец рычага 13 с помощью При включении двигателя 2 через пружины 14 связан с корпусом 1, а передачу 3 и редуктор 4 движение средняя опора 15 смонтирована с воз35 передается кулачкам 5 и 6 и далее можностью перемещения относительно через рычажную систему - вертикалькорпуса 1 посредством винтовой переному валу 7. В результате взаимодейдачи 16 для регулировки величины ствия рычага 13 с участком о кулачподъема и опускания захватов. Кулачка 5 осуществляется опускание левого ки 6 закреплены на валу привода с поего плеча, при этом связь правого с мощью диска 17 и установлены с возвертикальным валом обеспечивает подъможностью взаимодействия с выключаем на необходимую высоту вертикальтелем 18 и управляющим пневмоклапаного вала 7 с захватом 10. После тоном 19, левая полость которого соединена трубопроводом 20 с пневмосетью 45 го, как кулачок 5 повернется и во взаимодействие с рычагом 13 вступит и трубопроводом 21 с эжектором 22, участок S , подъем вертикального ваа правая полость трубопроводами 23 ла 7 прекращается. Одновременно кусоединена со вспомогательными мехалачок 5 участком і взаимодействует низмами пресса, например механизмами с шатуном 11, шарнирно связанным с удаления готовых деталей из зоны 50 рычагом 12, вследствие чего осуществпресса. ляются поворот поднятого вертикального вала 7 вокруг продольной оси Вертикальный вал 7 и механическая и перенос детали в рабочую зону штамрука 8 выполнены полыми для установпа. При этом скорость поворота измеки внутри трубопроводов с энергоносителем. Вертикальный вал 7 смонтиро- 55 няется по гармоническому закону, что обеспечивает наибольшую производиван в подшипниках с возможностью тельность труда при минимальных диподъема и поворота вокруг своей пронамических нагрузках. дольной оси. 1279817 рует с управляющим пкевмоклапаном 19, После поворота кулачка 5 на 180 е который открывает свою правую полость ролик рычага 13, вновь попадает во для доступа сжатого воздуха в трубовпадину участка Ь и описанным путем под действием этого рычага вертипровод 23 и далее - к механизму удакальный вал 7 опускается и захват 10 ления готовой детали из зоны штампа, укладывает заготовки.точно в штамп. например, пневмосдувareлям. При опускании вертикального вала Цикл окончен. Конечным положением опускается и жестко связанная с ним является расположение руки и захвата тяга 27, соединенная в свою очередь на позиции загрузки. с тарельчатым клапаном 25, который Ю перекрывает выходное отверстие 26 Формула изобретения эжектора-22. taKHM образом, сжатый воздух по трубопроводу 24 подается Манипулятор, содержащий механик вакуумному захвату, происходит прическую руку с пневматическими захватнудительное отделение заготовки от 15 ными органами, установленную на верзахвата. Далее осуществляется подътикальном валу, связанном посредстем вертикального вала 7 при взаимовом рычажной системы,с приводом ее действии с выступом участка Ь кулач• подъема и поворота, кулачки, закрепка и поворот вертикального вала 7 ленные на валу редуктора и взаимодейв обратном направлении. При этом кла20 ствующие с пневмоклапаном, связанным пан 25 открывает выходное отверстие трубопроводом с пневматическими ме26 и сжатый воздух выходит в атмосфеханизмами, и эжектор с клапанным ру. Таким образом, по трубопроводу 24 устройством, связанный трубопроводом подается к захвату разрежение и зас пневматическими захватными органахват 10 подготовлен к следующему 25 ми, о т л и ч а ю щ и й с я тем, циклу. что, с целью повышения надежности и точности позиционирования, клапанное После поворота один из кулачков 6 устройство эжектора жестко связано .взаимодействует с выключателем 18, с вертикальным валом посредством подающим сигнал на включение рабочего хода пресса. Затем после штам30 дополнительно введенной тяги, при повки заготовки и подъема ползуна этом ось эжектора параллельна оси пресса другой из кулачков 6 контактивертикального вала. Редактор Н.Швыдкая Составитель ]>Г.Бакулина Техред Л.Олейник Корректор А.Обручар Заказ 7004/14 Тираж 1031 Подписное ВНИИПИ Государственного комитета СССР по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5 Лроизводственно-полиграфическое предприятие, Г.Ужгород, ул.Проектная, 4
ДивитисяДодаткова інформація
Автори англійськоюShumeiko Dmytro Ivanovych, Kravchun Stepan Ivanovych
Автори російськоюШумейко Дмитрий Иванович, Кравчун Степан Иванович
МПК / Мітки
МПК: B25J 9/00
Мітки: маніпулятор
Код посилання
<a href="https://ua.patents.su/4-188-manipulyator.html" target="_blank" rel="follow" title="База патентів України">Маніпулятор</a>
Поворотний пристрій
Номер патенту: 234
Опубліковано: 30.04.1993
Автори: Шелест Володимир Ілліч, Красильніков Геннадій Якович, Топоров Юрій Миколайович, Яніцький Віталій Генріхович, Петрук Анатолій Іванович
МПК: F16H 25/00
Мітки: поворотний, пристрій
Формула / Реферат:
Формула изобретенияПоворотное устройство, содержащее корпус, установленные в нем ведущий вал с кулачками, рабочий профиль одного из которых выполнен разомкнутым по минимальным радиусам-веторам, ведомый вал, установленное на нем коромысло с роликами, взаимодействующими с кулачками, и жестко связанное с ведомым валом исполнительное звено, отличающееся тем, что, с целью повышения надежности, оно снабжено размещенным на ведущем валу...
Система автоматичного регулювання двигуна внутрішнього згоряння
Номер патенту: 30
Опубліковано: 30.04.1993
Автор: Музичук Федір Максимович
МПК: G05D 13/00, F02D 1/08
Мітки: двигуна, внутрішнього, система, автоматичного, регулювання, згоряння
Формула / Реферат:
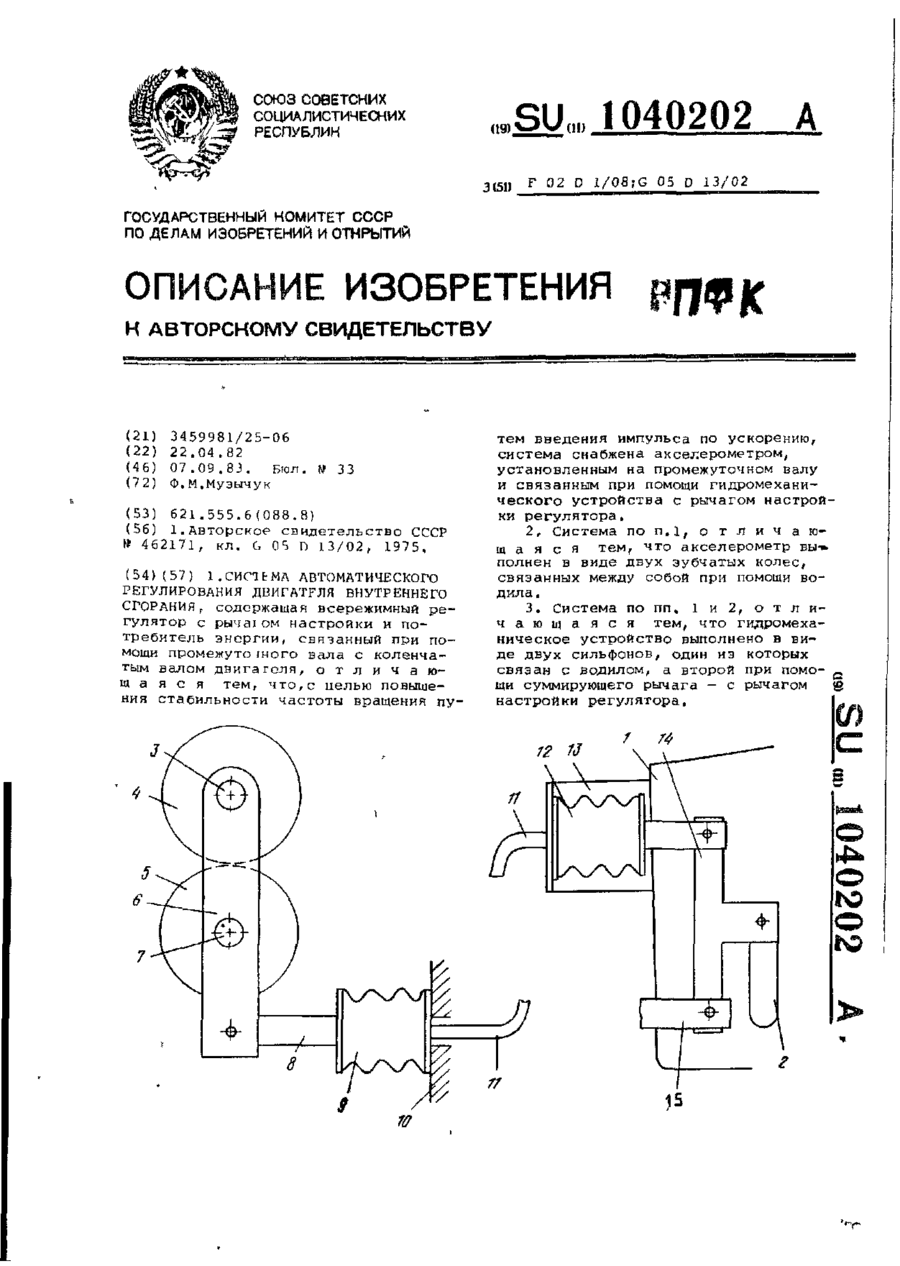
(57) 1.Система автоматического регулирования двигателя внутреннего сгорания, содержащая всережимный регулятор с рычагом настройки и потребитель энергии, связанный при помощи промежуточного вала с коленчатым валом двигателя, отличающаяся тем, что,с целью повышения стабильности частоты вращения путем введения импульса по ускорению, система снабжена акселерометром, установленным на промежуточном валу и связанным при помощи гидромеханического...
Силова установка

Номер патенту: 29
Опубліковано: 30.04.1993
Автор: Музичук Федір Максимович
Формула / Реферат:
(57) Силовая установка, содержащая дизель с топливным насосом и всережимным регулятором, снабженным рычагом управления, потребитель механической энергии, установленный на опорах фундамента, и систему дополнительного регулирования частоты вращения коленчатого вала дизеля, содержащую передаточный механизм, связанный с всережимным регулятором, о т л и ч а ю щ а я с я тем, что, с целью упрощения конструкции путем использования угловых перемещений...
Гіпсомішалка
Номер патенту: 339
Опубліковано: 30.04.1993
Автори: Кундін Станіслав Ісакович, Бурлика Анатолій Пилипович, Шульман Григорій Маркович, Фрідман Роман Аркадійович, Ларіонов Михайло Тихонович
МПК: B28C 5/16
Мітки: гіпсомішалка
Формула / Реферат:
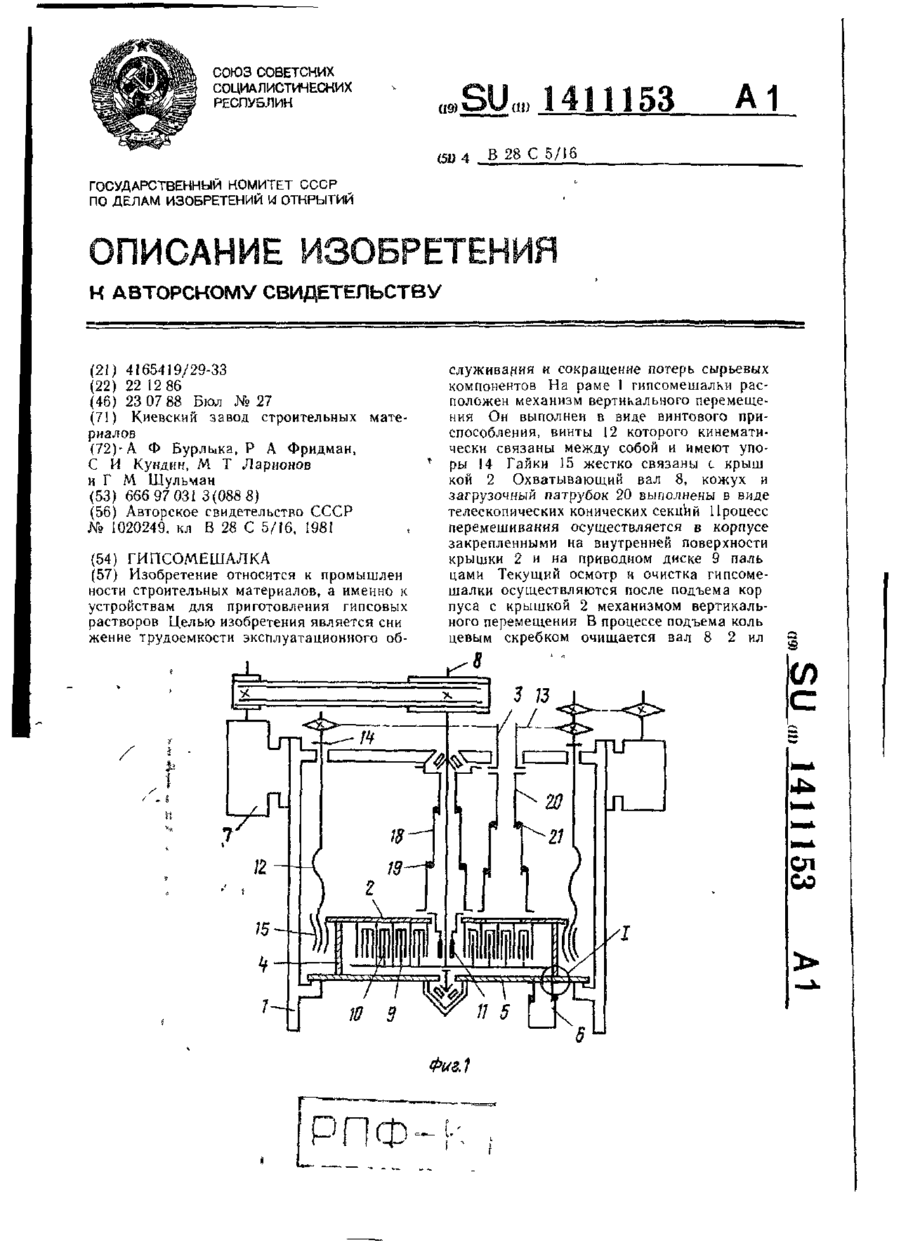
Формула изобретенияГипсомешалка, содержащая смонтированный на раме корпус с имеющей загрузочный патрубок крышкой, на внутренней поверхности которой установлены пальцы, расположенный в полости корпуса на приводном валу диск с параллельными оси вала пальцами и днище с выгрузочным патрубком, отличающаяся тем, что, с целью снижения трудоемкости эксплуатационного обслуживания и сокращения технологических потерь сырьевых компонентов, она...
Пристрій для укладення плоских виробів у пакет
Номер патенту: 336
Опубліковано: 30.04.1993
Автори: Ларіонов Михайло Тихонович, Вінокур Юрій Натанович, Гізунтерман Вілен Рафаілович, Кундін Станіслав Ісакович, Шульман Григорій Маркович, Бурлика Анатолій Пилипович, Фрідман Роман Аркадійович, Гелев Георгій Наумович
МПК: B65G 57/02
Мітки: плоских, пристрій, виробів, укладення, пакет
Формула / Реферат:
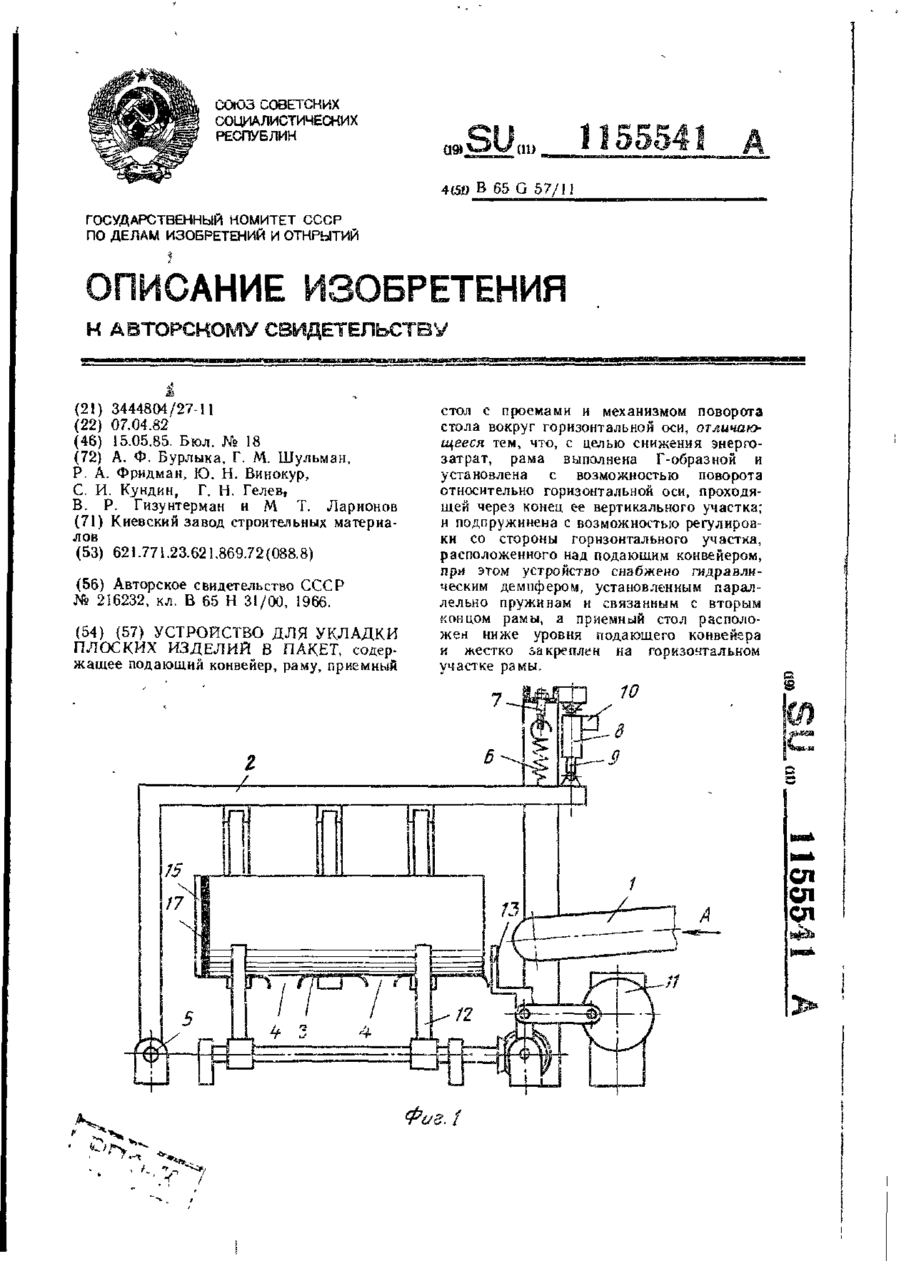
(57) Устройство для укладки плоских изделий в пакет, содержащее подающий конвейер, раму, приемный стол с проемами и механизмом поворота стола вокруг горизонтальной оси, отличающееся тем, что, с целью снижения энергозатрат, рама выполнена Г-образной и установлена с возможностью поворота относительно горизонтальной оси, проходящей через конец ее вертикального участка; и подпружинена с возможностью регулировки со стороны горизонтального участка,...
Попередній патент: Зовнішнє дзеркало заднього огляду
Наступний патент: Пристрій для опалення і вентиляції салону транспортного засобу
Випадковий патент: Спосіб хірургічного лікування черепно-мозкових поранень з газової ствольної зброї