Пристрій для виміру дальності “далекомір лазерний лвв “бджола”
Номер патенту: 51836
Опубліковано: 10.08.2010
Автори: Пономарьов Олександр Васильович, Шевелев Анатолій Дмитрович, Пастушенко Юрій Юрійович, Арбузов Юрій Васильович, Литвиненко Олександр Іванович, Семенюк Павло Миколайович, Бочаров Борис Миколайович

Формула / Реферат
Пристрій для виміру дальності, що містить лазерний випромінювач, фотоприймальний вузол, вимірник інтервалів часу, вузол відображення інформації, засіб автоматики, перетворювач постійного струму, засіб для підпалу, панель управління й джерело живлення, який відрізняється тим, що додатково містить обчислювач, а засіб автоматики виконаний з можливістю випромінювання пари імпульсів протягом 0,20-0,55 секунд з періодом 4-6 секунд.
Текст
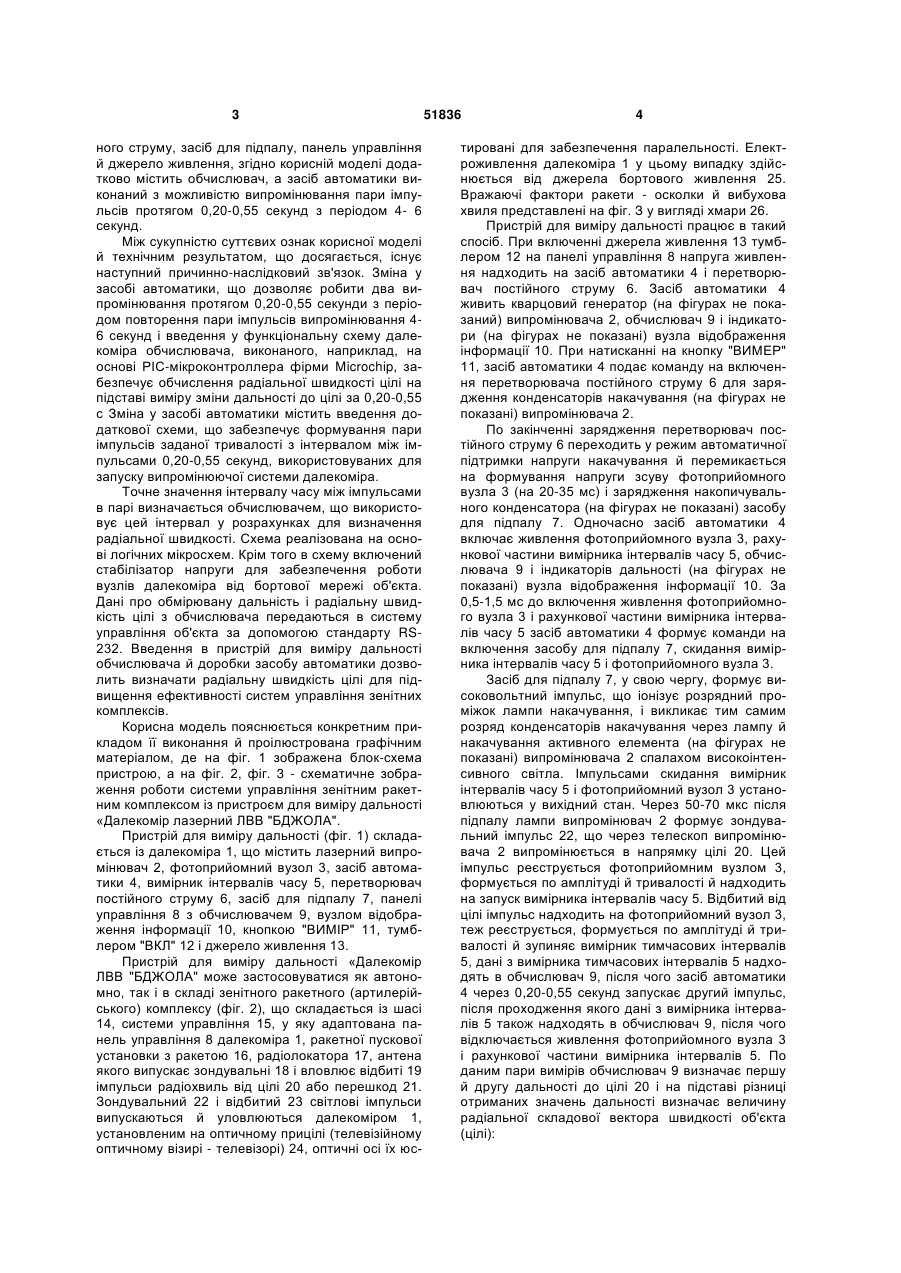
Пристрій для виміру дальності, що містить лазерний випромінювач, фотоприймальний вузол, вимірник інтервалів часу, вузол відображення інформації, засіб автоматики, перетворювач постійного струму, засіб для підпалу, панель управління й джерело живлення, який відрізняється тим, що додатково містить обчислювач, а засіб автоматики виконаний з можливістю випромінювання пари імпульсів протягом 0,20-0,55 секунд з періодом 4-6 секунд. (19) (21) u200908653 (22) 17.08.2009 (24) 10.08.2010 (46) 10.08.2010, Бюл.№ 15, 2010 р. (72) АРБУЗОВ ЮРІЙ ВАСИЛЬОВИЧ, ШЕВЕЛЕВ АНАТОЛІЙ ДМИТРОВИЧ, СЕМЕНЮК ПАВЛО МИКОЛАЙОВИЧ, БОЧАРОВ БОРИС МИКОЛАЙОВИЧ, ЛИТВИНЕНКО ОЛЕКСАНДР ІВАНОВИЧ, ПАСТУШЕНКО ЮРІЙ ЮРІЙОВИЧ, ПОНОМАРЬОВ ОЛЕКСАНДР ВАСИЛЬОВИЧ (73) ФЕОДОСІЙСЬКИЙ КАЗЕННИЙ ОПТИЧНИЙ ЗАВОД 3 ного струму, засіб для підпалу, панель управління й джерело живлення, згідно корисній моделі додатково містить обчислювач, а засіб автоматики виконаний з можливістю випромінювання пари імпульсів протягом 0,20-0,55 секунд з періодом 4- 6 секунд. Між сукупністю суттєвих ознак корисної моделі й технічним результатом, що досягається, існує наступний причинно-наслідковий зв'язок. Зміна у засобі автоматики, що дозволяє робити два випромінювання протягом 0,20-0,55 секунди з періодом повторення пари імпульсів випромінювання 46 секунд і введення у функціональну схему далекоміра обчислювача, виконаного, наприклад, на основі РІС-мікроконтроллера фірми Microchip, забезпечує обчислення радіальної швидкості цілі на підставі виміру зміни дальності до цілі за 0,20-0,55 с Зміна у засобі автоматики містить введення додаткової схеми, що забезпечує формування пари імпульсів заданої тривалості з інтервалом між імпульсами 0,20-0,55 секунд, використовуваних для запуску випромінюючої системи далекоміра. Точне значення інтервалу часу між імпульсами в парі визначається обчислювачем, що використовує цей інтервал у розрахунках для визначення радіальної швидкості. Схема реалізована на основі логічних мікросхем. Крім того в схему включений стабілізатор напруги для забезпечення роботи вузлів далекоміра від бортової мережі об'єкта. Дані про обмірювану дальність і радіальну швидкість цілі з обчислювача передаються в систему управління об'єкта за допомогою стандарту RS232. Введення в пристрій для виміру дальності обчислювача й доробки засобу автоматики дозволить визначати радіальну швидкість цілі для підвищення ефективності систем управління зенітних комплексів. Корисна модель пояснюється конкретним прикладом її виконання й проілюстрована графічним матеріалом, де на фіг. 1 зображена блок-схема пристрою, а на фіг. 2, фіг. 3 - схематичне зображення роботи системи управління зенітним ракетним комплексом із пристроєм для виміру дальності «Далекомір лазерний ЛВВ "БДЖОЛА". Пристрій для виміру дальності (фіг. 1) складається із далекоміра 1, що містить лазерний випромінювач 2, фотоприйомний вузол 3, засіб автоматики 4, вимірник інтервалів часу 5, перетворювач постійного струму 6, засіб для підпалу 7, панелі управління 8 з обчислювачем 9, вузлом відображення інформації 10, кнопкою "ВИМІР" 11, тумблером "ВКЛ" 12 і джерело живлення 13. Пристрій для виміру дальності «Далекомір ЛВВ "БДЖОЛА" може застосовуватися як автономно, так і в складі зенітного ракетного (артилерійського) комплексу (фіг. 2), що складається із шасі 14, системи управління 15, у яку адаптована панель управління 8 далекоміра 1, ракетної пускової установки з ракетою 16, радіолокатора 17, антена якого випускає зондувальні 18 і вловлює відбиті 19 імпульси радіохвиль від цілі 20 або перешкод 21. Зондувальний 22 і відбитий 23 світлові імпульси випускаються й уловлюються далекоміром 1, установленим на оптичному прицілі (телевізійному оптичному візирі - телевізорі) 24, оптичні осі їх юс 51836 4 тировані для забезпечення паралельності. Електроживлення далекоміра 1 у цьому випадку здійснюється від джерела бортового живлення 25. Вражаючі фактори ракети - осколки й вибухова хвиля представлені на фіг. З у вигляді хмари 26. Пристрій для виміру дальності працює в такий спосіб. При включенні джерела живлення 13 тумблером 12 на панелі управління 8 напруга живлення надходить на засіб автоматики 4 і перетворювач постійного струму 6. Засіб автоматики 4 живить кварцовий генератор (на фігурах не показаний) випромінювача 2, обчислювач 9 і індикатори (на фігурах не показані) вузла відображення інформації 10. При натисканні на кнопку "ВИМЕР" 11, засіб автоматики 4 подає команду на включення перетворювача постійного струму 6 для зарядження конденсаторів накачування (на фігурах не показані) випромінювача 2. По закінченні зарядження перетворювач постійного струму 6 переходить у режим автоматичної підтримки напруги накачування й перемикається на формування напруги зсуву фотоприйомного вузла 3 (на 20-35 мс) і зарядження накопичувального конденсатора (на фігурах не показані) засобу для підпалу 7. Одночасно засіб автоматики 4 включає живлення фотоприйомного вузла 3, рахункової частини вимірника інтервалів часу 5, обчислювача 9 і індикаторів дальності (на фігурах не показані) вузла відображення інформації 10. За 0,5-1,5 мс до включення живлення фотоприйомного вузла 3 і рахункової частини вимірника інтервалів часу 5 засіб автоматики 4 формує команди на включення засобу для підпалу 7, скидання вимірника інтервалів часу 5 і фотоприйомного вузла 3. Засіб для підпалу 7, у свою чергу, формує високовольтний імпульс, що іонізує розрядний проміжок лампи накачування, і викликає тим самим розряд конденсаторів накачування через лампу й накачування активного елемента (на фігурах не показані) випромінювача 2 спалахом високоінтенсивного світла. Імпульсами скидання вимірник інтервалів часу 5 і фотоприйомний вузол 3 установлюються у вихідний стан. Через 50-70 мкс після підпалу лампи випромінювач 2 формує зондувальний імпульс 22, що через телескоп випромінювача 2 випромінюється в напрямку цілі 20. Цей імпульс реєструється фотоприйомним вузлом 3, формується по амплітуді й тривалості й надходить на запуск вимірника інтервалів часу 5. Відбитий від цілі імпульс надходить на фотоприйомний вузол 3, теж реєструється, формується по амплітуді й тривалості й зупиняє вимірник тимчасових інтервалів 5, дані з вимірника тимчасових інтервалів 5 надходять в обчислювач 9, після чого засіб автоматики 4 через 0,20-0,55 секунд запускає другий імпульс, після проходження якого дані з вимірника інтервалів 5 також надходять в обчислювач 9, після чого відключається живлення фотоприйомного вузла 3 і рахункової частини вимірника інтервалів 5. По даним пари вимірів обчислювач 9 визначає першу й другу дальності до цілі 20 і на підставі різниці отриманих значень дальності визначає величину радіальної складової вектора швидкості об'єкта (цілі): 5 Д2 51836 Д1 t , де Д1 - перша дальність до об'єкта, м; Д2 – друга дальність до об'єкта, м; Δt - обмірюваний інтервал часу, с Результати вимірів передаються на індикатори вузла відображення інформації 10, на яких протягом 13-17 секунд відображаються друга дальність у метрах і радіальна складова вектора швидкості в м/с, після чого засіб автоматики відключає живлення індикаторної частини вузла відображення інформації 10. Для проведення чергового виміру, але не раніше, ніж через 5-7 секунд необхідно знову натиснути кнопку "ВИМІР". Система управління зенітним ракетним комплексом із пристроєм для виміру дальності до об'єктів і їх радіальної швидкості - «Далекоміром лазерним ЛВВ "Бджола" працює в такий спосіб. Комп’ютерна верстка І.Скворцова 6 При виявленні засобами ППО повітряної цілі 20 і видачі даних на неї зенітному ракетному комплексу подальший супровід цілі 20 до зони поразки забезпечується радіолокаційною станцією 17 комплексу. У випадку постановки супротивником радіоперешкод 21, що знижують ефективність зондувальних радіоімпульсів 18, або з міркувань маскування супровід цілі 20 переводиться на телевізійний оптичний візир 24. При вході цілі 20 у зону поразки зенітного ракетного комплексу 14 лазерним далекоміром 1 (порівнянням зондувального 23 і відбитого 24 світлових імпульсів) визначається дальність до цілі і її радіальна швидкість, отримані дані передаються в систему управління 15, що виробляє настанови для стрільби. Після підтвердження рішення здійснюється пуск ракети 16, бойова частина якої підривається при зближенні з ціллю 20 і осколками й вибуховою хвилею 26 знищує її. Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for measurement of range “laser range-finder lvv “bdzhola”
Автори англійськоюArbuzov Yurii Vasyliovych, Shevelev Anatolii Dmytrovych, Semeniuk Pavlo Mykolaiovych, Bocharov Borys Mykolaiovych, Lytvynenko Oleksandr Ivanovych, Pastushenko Yurii Yuriiovych, Ponomariov Oleksandr Vasyliovych
Назва патенту російськоюУстройство для измерения дальности "дальномер лазерный лвв "пчела"
Автори російськоюАрбузов Юрий Васильевич, Шевелев Анатолий Дмитриевич, Семенюк Павел Николаевич, Бочаров Борис Николаевич, Литвиненко Александр Иванович, Пастушенко Юрий Юрьевич, Пономарев Александр Васильевич
МПК / Мітки
МПК: G01S 15/00
Мітки: лазерний, дальності, виміру, лвв, пристрій, далекомір, бджола
Код посилання
<a href="https://ua.patents.su/3-51836-pristrijj-dlya-vimiru-dalnosti-dalekomir-lazernijj-lvv-bdzhola.html" target="_blank" rel="follow" title="База патентів України">Пристрій для виміру дальності “далекомір лазерний лвв “бджола”</a>
Спосіб виміру дальності до об’єкта, що рухається, і пристрій для його здійснення
Номер патенту: 78384
Опубліковано: 15.03.2007
Автори: Величко Анатолій Федорович, Величко Дмитро Анатолійович, Луценко Владислав Іванович
МПК: G01S 13/02
Мітки: рухається, спосіб, здійснення, об'єкта, дальності, виміру, пристрій
Формула / Реферат:
1. Спосіб виміру дальності до об'єкта, що рухається, який включає випромінювання в простір безперервного електромагнітного сигналу з гармонійною частотною модуляцією, прийом сигналу, відбитого від місцевості та від об'єкта, що рухається на відстані r, перетворення його шляхом перемножування з першим опорним сигналом, за який використовується частина потужності випромінюваного сигналу, розгалуження перетвореного сигналу на два канали,...
Лазерний далекомір

Номер патенту: 67494
Опубліковано: 15.06.2004
Автори: Федун Олексій Вікторович, Білинський Володимир Йосипович, Білинський Йосип Йосипович
МПК: G01C 3/00
Формула / Реферат:
Лазерний далекомір, який містить лазер, оптичний фільтр, лінзу, оптичний вхід якої зв'язано з виходом оптичного фільтра, який відрізняється тим, що в нього введені блок фоконів з роздільними оптичними входами та спільним оптичним виходом, вхід якого зв'язаний з виходом лінзи, сенсор, оптичний вхід якого зв'язаний з виходом блока фоконів, обчислювальний пристрій, вхід якого зв'язаний з виходом сенсора, та кроковий двигун для керування блоком...
Лазерний далекомір
Номер патенту: 88987
Опубліковано: 10.12.2009
Автори: Брух Георгій Андрійович, Титаренко Іван Титович, Гринюк Ігор Євгенович, Пасько Ігор Матвійович
МПК: G01C 3/00
Формула / Реферат:
Лазерний далекомір, що містить коліматор з об'єктивом і напівпровідниковим лазером, блок живлення, приймальний об'єктив, оптична вісь якого паралельна оптичній осі коліматора, фотоприймач і електрично з'єднаний з ним блок обробки сигналів, який відрізняється тим, що в нього додатково введений набір коліматорів, діаметри об'єктивів яких, а також їх фокусні відстані не менше ніж в три рази менші діаметра і фокусної відстані приймального...
Оптичний далекомір
Номер патенту: 35108
Опубліковано: 15.03.2001
Автори: Белінський Борис Олексійович, Каравашкін Борис Михайлович, Марцинюк Віктор Іванович, Павленко Анатолій Володимирович
Формула / Реферат:
Оптичний далекомір, що містить два об'єктиви, який відрізняється тим, що згадані об'єктиви встановлені на кінцях бази далекоміра й один з об'єктивів повернений щодо лінії візування далекоміра на фіксований кут @11°, а у фокальній площині об'єктивів установлені ПЗС-матриці, повний телевізійний сигнал (ПТС), із виходу яких надходить на вхід блока виміру дальності, до виходу якого залучений відеоконтрольний пристрій, причому ПТС з виходу однієї...
Танковий приціл-далекомір
Номер патенту: 1338
Опубліковано: 15.08.2002
Автори: Матузко Борис Павлович, Саєнко Максим Валерійович
Мітки: приціл-далекомір, танковий
Формула / Реферат:
Танковий приціл-далекомір, що має пульт управління, встановлений на корпусі прицілу, випромінювач, приймач випромінювання, встановлені окремо підсилювач далекоміра, блок вимірювання часових інтервалів, лічильник двійковий, розміщені в електроблоці прицілу, блок лінз оптичного каналу, механізм зміни кратності з електроприводом, що складається з електродвигуна з обмотками управління і редуктора, кінематично зв'язаного з блоком лінз оптичного...
Попередній патент: Спосіб визначення жувальної ефективності (жувальна проба по шукліну в.а.)
Наступний патент: Спосіб прогнозування групи інвалідності у хворих на цукровий діабет
Випадковий патент: Агрегат "мрія"