Спосіб виміру дальності до об’єкта, що рухається, і пристрій для його здійснення
Номер патенту: 78384
Опубліковано: 15.03.2007
Автори: Величко Анатолій Федорович, Луценко Владислав Іванович, Величко Дмитро Анатолійович



Формула / Реферат
1. Спосіб виміру дальності до об'єкта, що рухається, який включає випромінювання в простір безперервного електромагнітного сигналу з гармонійною частотною модуляцією, прийом сигналу, відбитого від місцевості та від об'єкта, що рухається на відстані r, перетворення його шляхом перемножування з першим опорним сигналом, за який використовується частина потужності випромінюваного сигналу, розгалуження перетвореного сигналу на два канали, перемножування цих сигналів із другим і третім опорними сигналами, за які для третього сигналу першого каналу використовується k-та гармоніка частоти модуляції Fm безпосередньо, а для другого - та ж гармоніка з додатковим фазовим зсувом, фільтрацію перетворених в обох каналах сигналів у смузі доплерівських зсувів частоти, що відповідають діапазону швидкостей об'єкта, і вимір дальності за різницею фаз сигналів, який відрізняється тим, що у вихідний сигнал доплерівської частоти другого каналу вводять додатковий зсув фаз на 90°, підсумовують і віднімають отриманий сигнал із вихідним сигналом доплерівської частоти першого каналу, одержуючи сумарний і різницевий сигнали, і визначають різницю фаз φ між сумарним сигналом і різницевим сигналом на доплерівській частоті, за якою обчислюють дальність до об'єкта, що рухається, за формулою
![]() , де
, де
с - швидкість поширення радіохвиль,
φ - фазовий зсув у градусах, при цьому третій опорний сигнал має 90° додатковий зсув відносно другого опорного сигналу.
2. Пристрій виміру дальності до об'єкта, що рухається, який містить модулятор, генератор, антену, перший перетворювач частоти, підсилювач, другий перетворювач частоти, перший підсилювач доплерівських частот, які з'єднані послідовно, а також фазометр і помножувач частоти, вхід якого з'єднаний з виходом модулятора, а вихід - із другим входом другого перетворювача частоти і через перший фазозсувач - із другим входом третього перетворювача частоти, вихід якого з'єднаний з входом другого підсилювача доплерівських частот, при цьому другий вихід генератора з'єднаний із другим входом першого перетворювача частоти, який відрізняється тим, що додатково введені другий фазозсувач, а також суматор і блок обчислення різниці, перші входи яких з'єднані з виходом першого підсилювача доплерівських частот, а другі входи через другий фазозсувач - з виходом другого підсилювача доплерівських частот, при цьому вихід суматора з'єднаний з першим входом, а вихід блока обчислення різниці - із другим входом фазометра, а перші входи другого і третього перетворювачів частоти з'єднані між собою.
Текст
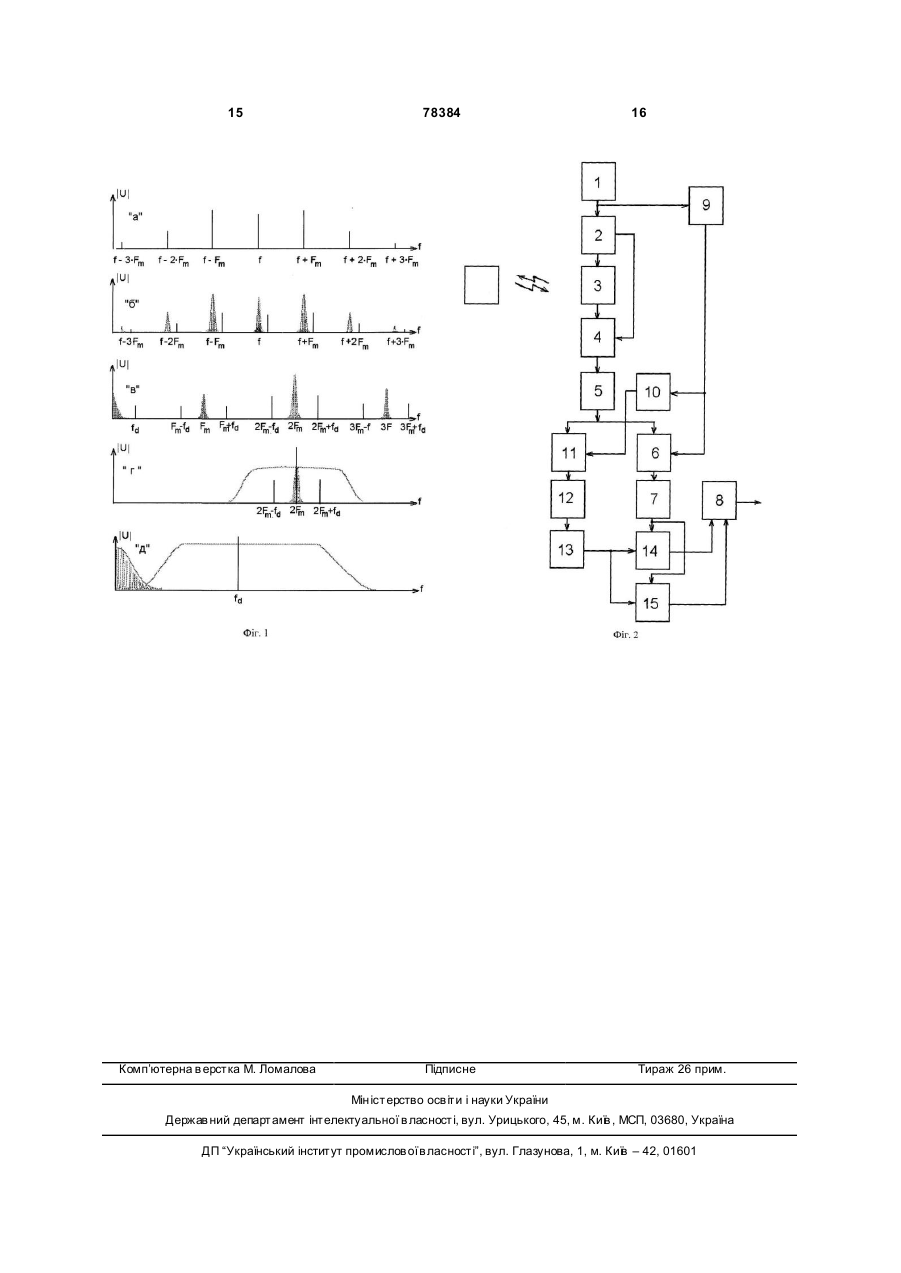
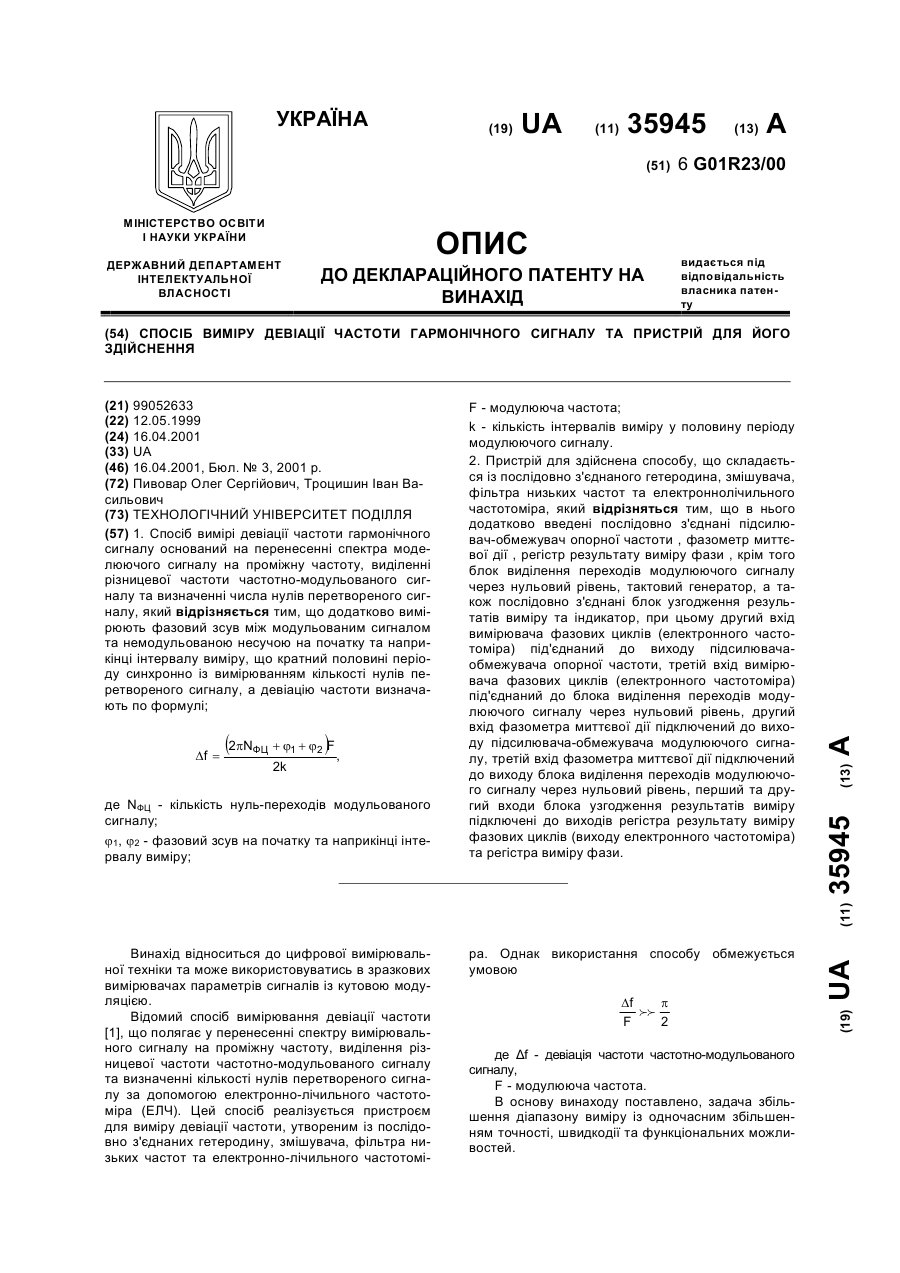
1. Спосіб виміру дальності до об'єкта, що рухається, який включає випромінювання в простір безперервного електромагнітного сигналу з гармонійною частотною модуляцією, прийом сигналу, відбитого від місцевості та від об'єкта, що рухається на відстані r, перетворення його шляхом перемножування з першим опорним сигналом, за який використовується частина потужності випромінюваного сигналу, розгалуження перетвореного сигналу на два канали, перемножування цих сигналів із другим і третім опорними сигналами, за які для третього сигналу першого каналу використовується k-та гармоніка частоти модуляції Fm безпосередньо, а для другого - та ж гармоніка з додатковим фазовим зсувом, фільтрацію перетворених в обох каналах сигналів у см узі доплерівських зсувів частоти, що відповідають діапазону швидкостей об'єкта, і вимір дальності за різницею фаз сигналів, який відрізняється тим, що у вихідний сигнал доплерівської частоти другого каналу вводять додатковий зсув фаз на 90°, підсумовують і відніма C2 2 UA 1 3 78384 реалізація оптимальної фільтрації відбитого сигналу при ідентичності фазочастотних характеристик каналів. Вимір відстані необхідний практично у всіх областях науки, те хніки і виробництва. Радіофізичні методи виміру відстані використовуються в цих областях дуже широко, зокрема, у висотомірах, у вимірниках швидкості і відстані до об'єкта, що рухається. Одержали поширення прості гомодинні радіолокаційні вимірники, в яких частина випромінюваної потужності використовується для перетворення прийнятого сигналу. Це дає можливість обмежитися одним генератором і одержати високу чутливість приймача. Підвищення точності вимірників даного типу і зниження нижнього порога швидкості руху об'єктів, дальність до яких виміряється, дозволяє підвищити якість виконуваних робіт, розширити сферу застосування приладів і тому є актуальним. У відомому способі «Вимір дальності до об'єкта, що рухається», [М.Сколник Введение в технику радиолокационных систем // Пер. с англ. под ред. К.Н.Трофимова. - Μ.: Мир, 1965. - 747с.], використовується вимір частоти биттів запізнілого відбитого і випромінюваного сигналу. Реалізований у звичайних частотних далекомірах він має наступний недолік - дискретну (крокову) погрішність виміру дальності Dr, яка пов'язана з девіацією частоти зондувального сигналу й обумовлена співвідношенням c (1) Dr = , 8 × Df де Df - девіація частоти, с - швидкість електромагнітних хвиль. Зниження крокової помилки досягається за рахунок застосування додаткової модуляції фази випромінюваної радіохвилі [див. книгу М.Сколника і пат. Японії 50-22418, НКІ: 111A1,1975p.]. Це знижує крокову помилку, але не усуває її повністю. Найближчим способом того ж призначення до заявленого способу є фа-зометричний спосіб виміру дальності до об'єкта, що рухається, при безперервному випромінюванні радіохвиль, викладений у [патенті США №3116483 НКВ. 343-14, 1963р.], що включає випромінювання в простір безперервного електромагнітного сигналу з гармонійною частотною модуляцією, прийом сигналу, відбитого від місцевості і об'єкту, що р ухається на відстані r від вимірювача, перетворення прийнятого сигналу частиною випромінюваної потужності, поділ перетвореного сигналу на два канали, у кожному з яких фільтруються відповідно верхні і нижня бічні смуги щодо k-тієї гармоніки частоти модуляції Fm, перемножування виділених сигналів з опорними коливаннями, у якості яких для одного з каналів використовується k-та гармоніка частоти, що модулює, безпосередньо, а в іншому така, яка має деяке регульоване фазове зрушення, фільтрацію перетворених в обох каналах сигналів у смузі доплеровських частот, що відповідають діапазонові швидкостей руху цілей, виділення напруги, пропорційної різниці фаз між вихідними сигналами першого і другого каналів і управління ним фазою опорного коливання другого каналу таким чином, щоб забезпечити фазовий зсув між вихід 4 ними сигналами каналів p, при цьому по напрузі, що надходить на управління фазовим зсувом опорного коливання другого каналу, визначають дальність до рухомої цілі. При фільтровому методі виділення верхньої і нижньої бічних смуг, реалізованому в розглянутому способі, пред'я вляються жорсткі вимоги до частотних характеристик каналів. Потрібне велике придушення сусідніх, розташованих поблизу на осі частот спектральних компонентів, і висока ідентичність фазочастотних характеристик. Виконання першої вимоги утр удняється при зменшенні доплеровського зсуву і при могутніх, набагато перевищуючий корисний сигнал перешкоджаючих відбиттях від нерухомих предметів; виконанню останньої вимоги заважає та обставина, що при збільшенні доплеровського зсуву частота сигналу в нижній смузі знижується, а у верхній смузі - збільшується. У зв'язку з цим при застосуванні розглянутого способу точність виміру дальності невелика особливо для цілей, що р ухаються з малими швидкостями. Відомий пристрій виміру дальності, у якому використовується залежність амплітудно-фазових характеристик відбитого сигналу від дальності до рухомої цілі [патент Великобританії №1268634 М.кл. G 01S 9/24 від 1972p., «Радіовисотомір»]. Радіовисотомір містить передавальний тракт, що включає послідовно з'єднаний НВЧ змішувач і селективний підсилювач, вихід якого з'єднаний з першими входами двох синхронних детекторів. Другі входи синхронних детекторів з'єднані з виходом модулятора через два фазозсувача. Виходи синхронних детекторів з'єднані з фільтрами доплеровських частот. Співвідношення амплітуд ви хідних сигналів з фільтрів доплеровських частот відповідає відстані до рухомої цілі. Воно може вимірятися безпосередньо, або за допомогою вимірювальної схеми, що включає додаткові підсилювачі-обмежники, синхронні детектори і систему автоматичного регулювання посиленням. У цій системі використовується залежність амплітуди вихідного сигналу доплеровської частоти від фази опорного сигналу. Однак, у зв'язку з використанням комбінації фазових і амплітудних характеристик відбитого сигналу, у зв'язку з погрішностями, внесеними системою автоматичного регулювання посиленням, точність виміру дальності у такій системі невелика. Найбільш близьким пристроєм того ж призначення, що і заявлений пристрій виміру дальності до об'єкта, що рухається, є пристрій [патент США №3116483 НКВ. 343-14,1963г.], що містить передавальний тракт, що включає послідовно з'єднані передавальну антену, ЧM генератор, модулятор, множник частоти, що модулює, і прийомний тракт, що включає послідовно з'єднані приймальну антену, вхідний НВЧ змішувач, др угий вхід якого з'єднаний із ЧM генератором, блок селекції, вихід якого підключений до входів опорного і вимірювального каналів, що містять синхронні детектори, виходи яких підключені через підсилювачі доплеровських частот до відповідних входів фазового детектора, з'єднаного своїм виходом з регулюючим пристроєм. Вихід множника частоти 5 78384 зв'язаний з гетеродинним входом синхронного детектора опорного каналу безпосередньо, а вимірювального каналу - через регульований фазозсувач, що керує, вхід якого з'єднаний з регулюючим пристроєм. Блок селекції виконаний у вигляді паралельно включених своїми входами двох смугових підсилювачів, ви ходи яких і є виходами блоку селекції. Один зі смугових підсилювачів забезпечує виділення нижньої бічної смуги частот k×Fm-F dmax£f£k×Fm-Fdmin в околиці k-τοϊ гармоніки частоти модуляції, а іншої - верхньої бічної смуги частот k×Fm+F dmi n£f£k×Fm+Fdmax, де Fm - частота модуляції, f - частота, Fdmin , Fdmax - мінімальний і максимальний доплеровський зсув прийнятого сигналу. Очевидно, що при фільтровому методі виділення верхньої і нижньої бічних смуг, реалізованому в розглянутому пристрої, пред'являються жорсткі вимоги до характеристик підсилювачів. Потрібне велике придушення сусідніх, розташованих поблизу на осі частот спектральних компонентів і висока ідентичність фазочастотних характеристик. Виконання першої вимоги утрудняється при зменшенні доплеровського зсуву і при могутніх, набагато перевищуючий корисний сигнал перешкоджаючих відбиттях від нерухомих предметів; виконанню останньої вимоги заважає та обставина, що при збільшенні доплеровського зсуву частота сигналу в нижній смузі знижується, а у верхній смузі - збільшується. У зв'язку з цим при застосуванні розглянутого пристрою точність виміру дальності невелика особливо для цілей, що рухаються з малими швидкостями і при великому діапазоні доплеровськіх зсувів відбити х сигналів. Відзначимо, що в пристроях, які використовують частотно-модульований сигнал і визначення запізнювання по частоті биттів використовується широка смуга перебудови генератора і широка щодо спектра відбитого сигналу смуга в приймачі; оптимальна фільтрація не розглядається. Утруднена оптимальна фільтрація й у пристрої, що є прототипом. Це значно обмежує можливості застосовуваних способів і пристроїв в області поліпшення співвідношення сигнал/шум, від якого також залежить точність виміру параметрів прийнятого радіосигналу. В основу першого з групи винаходів поставлена задача: удосконалити спосіб виміру дальності до об'єкта, що р ухається, шля хом заміни фільтрового методу виділення верхньої і нижньої бічних смуг на фазокомпенсаційний, що приводить до підвищення точності виміру дальності й одночасно з цим забезпечує глибоке придушення відбиттів від нерухомих предметів. В основу др угого з гр упи винаходів поставлена задача: удосконалити пристрій виміру дальності до об'єкта, що рухається, шляхом заміни виділення верхньої і нижньої бічних смуг, що здійснювалося за допомогою фільтрів, на введення додаткових фазових зрушень у компенсаційний канал, що приводить до підвищення точності виміру дальності й одночасно з цим забезпечує глибоке придушення відбиттів від нерухомих предметів. 6 Задача, поставлена перед першим із групи винаходів, вирішується за рахунок того, що відомий спосіб виміру дальності до об'єкта, що р ухається, який включає випромінювання в простір безперервного електромагнітного сигналу з гармонійною частотною модуляцією, прийом сигналу, відбитого від місцевості і від об'єкта, що рухається на відстані r, перетворення його шляхом перемножування з першим опорним сигналом, у якості якого використовується частина потужності випромінюваного сигналу, розгалуження перетвореного сигналу на два канали, перемножування їхніх сигналів із другим і третім опорними сигналами, у якості яких для третього сигналу першого каналу використовується k-та гармоніка частоти модуляції Fm безпосередньо, а для другого - така ж гармоніка з додатковим фазовим зсувом, фільтрацію перетворених в обох каналах сигналів у смузі доплеровських зсувів частоти, що відповідають діапазонові швидкостей об'єкта, і вимір дальності по різниці фаз сигналів, відповідно до винаходу у вихідний сигнал доплеровської частоти другого каналу вводять додатковий 90° зсув, підсумовують і віднімають отриманий сигнал з вихідним сигналом доплеровської частоти першого каналу, одержуючи, таким чином, сумарний і різницевий сигнали, і визначають різницю фаз j між сумарним сигналом і різницевим сигналом на доплеровській частоті, по якій обчислюють дальність до об'єкта, що р ухається, по формулі j c r= × , 360 2k × Fm де с - швидкість поширення радіохвиль, j фазовий зсув у градуса х, при цьому третій опорний сигнал має 90° додатковий зсув стосовно другого опорного сигналу. Введення у ви хідний сигнал доплеровської частоти другого каналу зсуву фаз на 90°, підсумовування і вирахування отриманого сигналу з вихідним сигналом доплеровської частоти першого каналу, забезпечує виділення в сумарному і різницевому сигналах верхньої і нижньої бічних смуг різницю фаз фазокомпенсаційним методом. При цьому забезпечується глибоке придушення відбиттів від нерухомих предметів. Для реалізації фазокомпенсаційного поділу вер хньої і нижньої бічних смуг у третій опорний сигнал вводять додатковий 90° зсув стосовно другого опорного сигналу. При цьому визначають різницю фаз j між сумарним і різницевим сигналами на доплеровській частоті, по якій обчислюють дальність до об'єкта, що р ухається, як j c r= × 360 2k × Fm де с - швидкість поширення радіохвиль, j фазовий зсув у градуса х, Fm, - часто та модуляції, k - номер гармоніки. Виділення компонентів спектра сигналу, отриманого після перетворення відбиттів від об'єкта частиною випромінюваної потужності, відомо. Деякі способи відзначені вище. Однак пропонована в способі, що заявляється, фазокомпенсаційна обробка (подвійна квадратурна обробка) з наступним лінійним перетворенням вихідних коливань кана 7 78384 лів, за рахунок яких досягається перенос фазового набігу, що виникає через запізнювання відбитої радіохвилі, на сигнал на частоті доплеровського зсуву, раніше не застосовувалися. Факт новизни пояснюється, зокрема, тим, що раніше застосовувані способи мали точність, що задовольняла вимогам практики, до простих радіолокаційних датчиків, до яких відносяться гомодинні РЛС. При цьому не пред'являлися вимоги селекції слабкого сигналу на фоні могутні х перешкоджаючих відбиттів, не виникала необхідність в оптимальній фільтрації, часто було достатнє лише виявлення об'єкта. Застосування подвійної квадратурної (фазокомпенсаційної) обробки відбитих від об'єктів, що рухаються, і від місцевості сигналів у РЛС із ЧM випромінюванням у сполученні із селекцією в діапазоні доплеровських зсувів і ідентичним розташуванням спектральних компонентів сигналу дозволяє набагато підвищити придушення перешкоджаючих відбиттів від нерухомих предметів і використовувати різницево-фазовий метод виміру дальності, що не може бути реалізовано іншими відомими методами. Для переносу на низькі частоти аналізованого доплеровського зсуву частоти сигналу, відбитого від цілі, для того, щоб глибоко придушити могутні перешкоджаючи відбиття від місцевості, що слабко відрізняються від нього по частоті, здійснюється друге перетворення прийнятих сигналів шляхом перемножування з другим опорним коливанням k-ої гармонікою частоти модуляції. При цьому через згортання верхньої і нижньої бічних смуг (щодо k-ої гармоніки) інформація про дальність до цілі утримується у вихідному сигналі у вигляді амплітудного множника і лише використання другої квадратури і додаткова фазова обробка дозволяють виділити окремо верхні і нижню бічні смуги і трансформувати інформацію про дальність до цілі у фазовий набіг на доплеровській частоті, що раніше не застосовувалося в способах виміру дальності, які використовують частотно модульований сигнал. При малих доплеровських зсувах частоти луни-сигналу цілі виділення верхніх і нижньої бічних смуг в околиці k-ої гармоніки частоти модуляції для виміру дальності різницево-фазовим методом іншими відомими способами неможливо. Задача, поставлена перед другим із групи винаходів, вирішується за рахунок того, що відомий пристрій виміру дальності до об'єкта, що рухається, який містить модулятор, генератор, антену, перший перетворювач частоти, підсилювач, другий перетворювач частоти, перший підсилювач доплеровських частот, з'єднані послідовно, а також фазометр і множник частоти, вхід якого з'єднаний з виходом модулятора, а вихід - із другим входом другого перетворювача частоти і через перший фазозсувач - із другим входом третього перетворювача частоти, вихід якого з'єднаний з входом другого підсилювача доплеровських частот, при цьому другий ви хід генератора з'єднаний із другим входом першого перетворювача частоти, відповідно до винаходу додатково введено другий фазозсувач, а також суматор і блок різниці, перші 8 входи яких з'єднані з виходом першого підсилювача доплеровських частот, а др угі входи через другий фазозсувач - з виходом другого підсилювача доплеровських частот, при цьому вихід суматора з'єднаний з першим входом, а вихід блоку різниці, із другим входом фазометра, а перші входи другого і третього перетворювачів частоти з'єднані між собою. Введення другого фазозсувача, суматора і блоку різниці, перші входи яких з'єднані з виходом першого підсилювача доплеровських частот, а другі входи через другий фазозсувач - з ви ходом другого підсилювача доплеровської частоти, при цьому вихід суматора з'єднаний з першим входом, а вихід блоку різниці - із другим входом фазометра, а перші входи другого і третього перетворювачів частоти з'єднані між собою, забезпечує шляхом уведення додаткових фазових зсувів у компенсаційний канал виділення верхньої і нижньої бічних смуг, що поліпшує ступінь придушення відбиттів від нерухомих предметів і підвищує точність виміру дальності, у тому числі і для малошвидкісних об'єктів. Це дозволяє в сполученні з фазокомпенсаційним поділом верхньої і нижньої бічних смуг підвищити точність виміру дальності, у тому числі і для малошвидкісних об'єктів. Виділення компонентів спектра сигналу, різниця фаз між якими містить інформацію про дальність, за допомогою фільтрів відомо. Однак введення в пристрій блоків, що заявляється, другого фазозсувача, суматора і блоку різниці дозволяє реалізувати фазовий поділ компонентів спектра, у тому числі й у тих випадках , коли доплеровський зсув частоти луни-сигналу цілі незначно відрізняється від доплеровського зсуву частоти перешкоджаючих розсіювачів. Можливість поділу компонент спектра, що несуть інформацію про дальність і одночасно з цим глибоке придушення відбиттів від місцевих предметів, реалізоване новими, додатково введеними блоками, в сукупності з існуючими у відомому пристрої, дозволяє підвищити точність виміру дальності, у тому числі і для об'єктів, які рухаються повільно; це принципово неможливо в пристрої-прототипі. Застосування з використанням уведених блоків і зв'язків подвійної квадратурної (фазокомпенсаційної) обробки відбитих від об'єктів, що р ухаються, і від місцевості сигналів у РЛС із ЧM випромінюванням у сполученні із селекцією в діапазоні доплеровських зсувів за допомогою доплеровських фільтрів і ідентичним розташуванням спектральних компонентів сигналу дозволяє набагато підвищити придушення перешкоджаючих відбиттів від нерухомих предметів і використовува ти різницево-фазовий метод виміру дальності, що неможливо реалізувати іншими відомими пристроями. Суть винаходу пояснюється кресленнями. На Фіг.1а,б,в,г,д представлені спектр випромінюваного сигналу, спектр відбитого сигналу, спектр прийнятого і перетвореного частиною випромінюваної потужності сигналу, взаємне розташування на осі частот k-тієї гармоніки модуляції і спектральних компонентів сигналу в каналах після фільтрації і спектр сигналу після другого перетворення відпо 9 78384 відно, на Фіг.2 - структурна схема пристрою для виміру дальності до об'єкта, що рухається. Спосіб виміру дальності до об'єкта, що рухається, який включає випромінювання в простір безперервного електромагнітного сигналу з гармонійною частотною модуляцією, прийом сигналу, відбитого від місцевості і від об'єкта, що рухається на відстані r, перетворення його шляхом перемножування з першим опорним сигналом, у якості якого використовується частина потужності випромінюваного сигналу, розгалуження перетвореного сигналу на два канали, перемножування їхніх сигналів із другим і третім опорними сигналами, у якості яких для третього сигналу першого каналу використовується k-та гармоніка частоти модуляції Fm безпосередньо, а для другого - така ж гармоніка з додатковим фазовим зсувом, фільтрацію перетворених в обох каналах сигналів у смузі доплеровських зсувів частоти, що відповідають діапазонові швидкостей об'єкта, і вимір дальності по різниці фаз сигналів, додатково у ви хідний сигнал доплеровської частоти другого каналу вводять 90° зсув, підсумовують і віднімають отриманий сигнал з вихідним сигналом доплеровської частоти першого каналу, одержуючи, таким чином, сумарний і різницевий сигнали, і визначають різницю фаз j між сумарним сигналом і різницевим сигналом на доплеровській частоті, по якій обчислюють дальність до об'єкта, що рухається, по формулі j c r= × 360 2k × Fm де с - швидкість поширення радіохвиль, j фазовий зсув у градуса х, при цьому третій опорний сигнал має 90° додатковий зсув стосовно другого опорного сигналу. Сукупність перетворень сигналу, що складають суть способу, полягає в наступному. Випромінюваний генератором безперервний 4M сигнал визначається співвідношенням et=U×cos[2p×f×t+m×cos(2p×Fmt+j m)+jt ], (2) де U, f, jt - амплітуда, частота і початкова фаза випромінюваного сигналу відповідно, Fm,jm частота і початкова фаза коливання, що модулює, m - індекс модуляції. Спектр випромінюваного сигналу при m=1,5 представлений на Фіг.1а. Прийнятий сигнал містить відбиття від місцевості й об'єкта, що рухається. У представленому на Фіг.1б спектрі цього сигналу, що флуктуірує, відбиття від місцевості розташовані на місці компонентів спектра випромінюваного сигналу і зображені пунктирними лініями. Відбиття від об'єкта, що р ухається, зрушені на частоту доплера щодо гармонік випромінюваного сигналу і представлені суцільними лініями. У прийомному тракті відбувається перетворення прийнятого сигналу частиною випромінюваної потужності. На виході першого перетворювача виділяється різницевий сигнал, що у даному випадку зручно виразити [див. Величко А.Ф., Величко Д.А. Характеристики отраженного сигнала при ретрансляционном методе и ограниченном подавлении боковых компонент спектра // Изв. высш. учеб. заведений, Радиоэлектроника. 2000. - т.43. - №3. - С.11-20.] наступним співвідношенням 10 é 2r ù eпр = Uпр exp ê j(2pf - jo ú ´ c ë û k = +¥ ì ü é ùï rö ï æ ´ å Jk ( z) exp í- jk ê 2pFm ç t - ÷ + jm ú ý, ï è cø ë ûï î þ k = -¥ (3) rö æ z = 2m × sinç 2pFm ÷ cø è де Uпp - амплітуда сигналу після перетворення, r - відстань РЛС-об'єкт, jο - зсув фази при відбитті від об'єкта. 2r Величина f × , що входить у загальний мноc жник, включає і постійну і змінну величину фазового набігу на несучій хвилі відповідно до залежності r=rо+Vr×t, де ro, Vr - відстань РЛС-об'єкт у початковий момент часу і радіальна складової його швидкості відповідно. Перемінна частина величини 2r f× дорівнює доплеровському зсуву. На Фіг.1в c показане розташування спектральних складових сигналу, відбитого об'єктом, що рухається, і перетвореного сигналу суцільними лініями, що флуктуірують, відбиття від місцевості, що розташовані на місці гармонік модуляції, зображені пунктиром. Отримані коливання піддаються обробці, що включає фільтрацію і друге перетворення. За допомогою фільтрації виділяються коливання в околиці k-тої гармоніки, виділені коливання розгалужуються на два ідентичних перетворювачі. Відзначимо, що через фільтр пропускаються і спектральний компонент, частота якого вище часто ти k-ої гармоніки модуляції, і спектральний компонент, частота якого нижче частоти цієї гармоніки. У прототипі був потрібен поділ даних спектральних компонентів. Розташування виділених смуг сигналу і перетворюючого коливання в каналах представлено на Фіг.1г. Для другого перетворення використовуються коливання, що відрізняються тільки по фазі: у першому каналі k-я гармоніка частоти, що модулює (4a) eг1=Uг1×cos(k×2pFm×t+k×jm), в другому каналі - k-я гармоніка з 90° зсувом æ pö e г 2 = Uг 2 × cosç k × 2 p Fm × t + k × jm - ÷ (4b) 2ø è Після згортки в кожнім каналі виробляється фільтрація коливань у смузі доплеровських зсувів об'єкта (див. Фіг.1д), у др угому каналі виділеним коливанням додається фазовий зсув 90°. Результати обробки сигналів у каналах при парному і непарному "k" відрізняються і можуть бути виражені в такий спосіб. При парному "k" на виході першого каналу буде отримане коливання æ 2r ö eв их k = U × Jk ( z) × cosæ k × 2pFm × r ö × cosç 2pf × - jo ÷ , (5a) ç ÷ 1 è cø c è ø на виході другого каналу коливання описується співвідношенням r pö 2p pö æ æ eв их2k = U × Jk (z ) × cosç k × 2 pFm × + ÷ × cosç 2pf × - jo + ÷ c 2ø c 2ø è è (5b) 11 78384 Вихід першого каналу розгалужується на два напрямки: частина вихідного сигналу надходить на підсумовування з вихідним коливанням другого каналу, друга частина використовується для вирахування з неї вихідного сигналу другого каналу. Це приводить до формування сумарного і різницевого сигналів, фази яких порівнюються. Підсумовування і вирахування коливань (5а) і (5Ь) при рівних коефіцієнтах передачі каналів дає гармонійні коливання, обумовлені відповідно співвідношеннями: æ 2r rö e S = U × Jk (z ) × cosç 2pf × - jo - k × 2 pFm × ÷ , c cø è (6a) 2r rö æ e D = U × Jk (z)× cosç 2pf × - jo + k × 2pFm × ÷ . (6b) c cø è При непарному "k" у першому каналі буде отримано: æ r ö æ 2r ö eвих1k = U × Jk (z) × cosç k × 2pFm × + p ÷ × cosç 2p f × - jo ÷ , (5c) c c è ø è ø на виході 2-го каналу буде отримано: æ r pö æ 2r pö eвих 2k = U × Jk × cosçk × 2pFm × + ÷ × cosç 2p × - jo - ÷ , (5d) c 2ø c 2ø è è після підсумовування сигналів коливання має вигляд: æ 2r rö eS = U × Jk ( z ) × cosç 2pf × - jo + k × 2pFm × ÷ c cø è (6с) а після вирахування: æ 2r rö e D = U × Jk (z )× cos ç 2pf × - jo - k × 2p Fm × ÷ . c cø è (6d) Як видно з приведених співвідношень фазовий набіг на частоті модуляції, що з'являється в результаті поширення радіохвилі до об’єкта і назад, перенесений на коливання на частоті доплеровського зсуву. У сумарному коливанні при парному "k" цей фазовий набіг зменшує фазу коливання першого каналу, при непарному "k" - збільшує, а в різницевому навпаки. Порівняння фази коливань (6а) або (6с) з фазою коливання (6b) або (6d) дозволяє виділити фазове запізнювання: r (7) j = 2 k × 2 p Fm × , c по величині якого обчислюється відстань: j c r= × . (8) 2p k × Fm Як видно з представлених перетворень, глибоке придушення перешкоджаючих відбиттів виконується в діапазоні доплеровських зсувів частоти. Реалізація характеристик фільтрів може досягатися за допомогою відомих методів [див., наприклад, Ханзел Г. Справочник по расче у фильтров / Пер. с англ. В.А. Старостина под ред. А.Е.Знаменского. - Μ.: Сов. радио, 1974, -288с.]. Аналіз перетворень і фільтрації компонентів спектра, з яких витягається інформація про дальність, дозволяє зробити висновок про те, що селекція прийнятого сигналу в обох каналах виконується в цілком співпадаючих частотних інтервалах, тому розходження в характеристиках фільтрів, які використовуються, буде тільки за рахунок відхилень при виготовленні елементів, з яких склада 12 ються пристрої каналів, що дозволяє досягали високої ідентичності фазочастотних характеристик каналів. Пристрій виміру дальності до об'єкта, що рухається, (Фіг.2), містить послідовно з'єднані модулятор 1, генератор 2, антену 3, перший перетворювач частоти 4, підсилювач 5, др угий перетворювач частоти 6, перший підсилювач доплеровських частот 7 з'єднані послідовно, а також фазометр 8 і множник частоти 9, вхід якого з'єднаний з виходом модулятора 1, а вихід - із другим входом другого перетворювача частоти 6 і через перший фазозсувач 10 - із другим входом третього перетворювача частоти 11, вихід якого з'єднаний із входом другого підсилювача доплеровських частот 12, при цьому другий вихід генератора 2 з'єднаний із другим входом першого перетворювача частоти 4, і др угий фазозсувач 13, а також суматор 14 і блок різниці 15, перші входи яких з'єднані з виходом першого підсилювача доплеровских частот 7, а другі входи через другий фазозсувач 13 - з виходом другого підсилювача доплеровских частот 12, при цьому вихід суматора 14 з’єднаний з першим входом, а вихід блоку різниці 15 із другим входом фазометра 8, а перші входи друго го 6 і третього 11 перетворювачів частоти з'єднані між собою. Пристрій виміру дальності працює в такий спосіб. Генератор 2, керований модулятором 1, виробляє відповідно співвідношенню (2) безперервні ЧM коливання НВЧ, що надходять на вхід приймально-передавальної антени 3, випромінюються нею в простір і відбиваються об'єктом. Спектр випромінюваного сигналу показаний на Фіг.1а, спектр відбитого сигналу представлений на Фіг.1б: суцільними лініями зображені компоненти спектру сигналу, який відбитий об'єктом, що рухається і має доплеровський зсув, п унктиром нанесені флуктуючі відбиття від місцевості. Частина відбитих радіохвиль повертається в антену 3 і з її виходу надходить на перший вхід першого перетворювача 4, у якому відбувається перетворення прийнятого сигналу частиною випромінюваної потужності, що надходить із другого ви ходу генератора 2. Перетворений сигнал, спектр якого відповідає співвідношенню (3) і показаний на Фіг.1в, надходить у підсилювач 5, де може провадитися фільтрація компонентів, розташованих вище і нижче обраної гармоніки модуляції. Частотна фільтрація в підсилювачі 5 допомагає позбутися деяких видів перешкод і в даному випадку не є обов'язковою, виділена область частот представлена на Фіг.1г. З ви ходу підсилювача 5 сигнал надходить на з'єднані між собою паралельно входи перетворювача 6 і перетворювача 11. На другі входи цих перетворювачів надходять коливання з виходу множника частоти модуляції 9: на другий перетворювач 6 безпосередньо (див. співвідношення (4а)), на третій перетворювач 11 - з фазовим зсувом 90° (див. співвідношення (4b)), що забезпечується першим фазозсувачом 10. У перетворювачах виробляється згортка спектральних компонентів, коливання з виходів перетворювачів надходять на однакові підсилювачі допле 13 78384 ровських частот, у яких селектируються коливання, викликані тільки прилягаючими до обраної гармоніки модуляції компонентами. Ця фільтрація дублює роботу фільтра підсилювача 5 в області високочастотних компонентів спектра і придушує низькочастотні перешкоди, викликані флуктуючими відбиттями від сторонніх об'єктів і місцевості. Коливання з виходу першого підсилювача доплеровських частот 7 підкоряються співвідношенням (5а) при парній гармоніці частоти модуляції і (5с) при непарному. Вихідний сигнал підсилювача доплеровських частот 12 підкоряється співвідношенням (5b) при парній гармоніці і (5d) при непарній. Крім фазового зсуву, що з'являється в другому каналі в результаті роботи першого фазозсувача 10, вихідний сигнал підсилювача 12 зсувається по фазі на 90° у другому фазозсувачі 13, чим забезпечується подвійне квадратурне перетворення. Сигнали з виходу першого каналу, яким є вихід підсилювача доплеровської частоти 7, і з виходу др угого каналу, яким є вихід др угого фазозсувача 13, очищені від перешкод, надходять у суматор 14 і блок різниці 15. Результатом додавання двох гармонік у суматорі 14 при рівному коефіцієнті передачі каналів є також гармоніка, що містить фазове запізнювання, пропорційне фазовому набігові на частоті модуляції Fm; сумарне коливання виражається співвідношеннями (6а) або (6с). Результатом вирахування двох гармонік у блоці різниці є також гармоніка, що містить фазове запізнювання, пропорційне фазовому набігові на частоті модуляції Fm, і описується співвідношеннями (6b) і (6d). Таким чином, на виході суматора виділяється сигнал верхньої бічної смуги з фазовим зсувом на доплеровській частоті, пропорційним дальності до об'єкта, а на виході блоку різниці виділяється сигнал нижньої бічної смуги з таким же по модулю і зворотним за знаком фазовим зсувом. З виходу суматора 14 коливання подається на перший вхід фазометра 8, на другий вхід якого надходить коливання з виходу першого каналу; різниця фаз між цими коливаннями (див. співвідношення (7)) містить інформацію про дальність, що може визначатися по формулі (8). 14 Аналіз співвідношення (8) показує, що діапазон вимірюваних до об'єкта дальностей залежить від діапазону виміру різниці фаз j сигналів фазометром, довжини хвилі Lm (частоти Fm сигналу, що модулює,), номера гармоніки k, що використовується. Наприклад, якщо заданий діапазон виміру дальностей до об'єкта 1,5км, фазометр забезпечує вимір різниці фаз від 0 до 2p , для вимірів використовується 2-а гармоніка сигналу, що модулює, то необхідна довжина Lm хвилі (F mчастота) модуляції буде: 2p Lm = 2k × × rmax = 6000м , j c Fm = = 100кГц . Lm Номер гармоніки, яка використовується в трактах обробки сигналу для виміру дальності, вибирається, як правило, з розумінь забезпечення необхідної залежності від дальності рівня прийнятого відбитого сигналу. Можна рекомендувати при вимірі дальності до крапкових об'єктів використовувати другу гармоніку (в інтерференційній області 4-у гармоніку), а при вимірі дальності до поверхнево розподілених об'єктів - суша, море (тобто в режимі висотоміра) - першої гармоніки частоти модуляції. Пропонований спосіб може бути реалізований при застосуванні існуючої елементної бази. Дальність до об'єкта виміряється з підвищеною точністю за рахунок: - переходу до виміру фазового набігу на частоті модуляції, що виникає при поширенні радіохвилі; - глибокого придушення перешкоджаючих відбиттів від нерухомих предметів і застосування оптимальної фільтрації відбитого сигналу; - простоти реалізації на низьких частотах ідентичних фазочастотних характеристик каналів. Заявлений спосіб і пристрій для його здійснення на відміну від відомих дотепер способів, що використовують сигнал з гармонійною частотною модуляцією, дозволяє вимірювати дальність до об'єкта, що повільно рухається на фоні місцевості. 15 Комп’ютерна в ерстка М. Ломалова 78384 Підписне 16 Тираж 26 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for distance measurement to moving object and device for its realization
Автори англійськоюVelychko Dmytro Anatoliiovych, Lutsenko Vladyslav Ivanovych
Назва патенту російськоюСпособ измерения дальности до движущегося объекта и устройство для его осуществления
Автори російськоюВеличко Дмитрий Анатолиевич, Луценко Владислав Иванович
МПК / Мітки
МПК: G01S 13/02
Мітки: об'єкта, пристрій, спосіб, рухається, дальності, здійснення, виміру
Код посилання
<a href="https://ua.patents.su/8-78384-sposib-vimiru-dalnosti-do-obehkta-shho-rukhaehtsya-i-pristrijj-dlya-jjogo-zdijjsnennya.html" target="_blank" rel="follow" title="База патентів України">Спосіб виміру дальності до об’єкта, що рухається, і пристрій для його здійснення</a>
Спосіб виміру девіації частоти гармонічного сигналу та пристрій для його здійснення
Номер патенту: 35945
Опубліковано: 16.04.2001
Автори: Троцишин Іван Васильович, Пивовар Олег Сергійович
МПК: G01R 23/00, G01R 25/00
Мітки: девіації, здійснення, сигналу, гармонічного, частоти, спосіб, виміру, пристрій
Формула / Реферат:
1. Спосіб вимірювання девіації частоти, оснований на перенесенні спектру модулюючого сигналу на проміжну частоту, виділенні різницевої частоти у частотно-модульованого сигналу та визначенні числа нулів перетвореного сигналу, який відрізняється тим, що додатково вимірюють фазовий зсув між модульованим сигналом та немодульованою несучою на початку та наприкінці інтервалу виміру, що кратний половині періоду синхронно із вимірюванням кількості...
Спосіб виміру добротності контуру методом биття частот і пристрій для його здійснення
Номер патенту: 44149
Опубліковано: 15.01.2002
Автор: Голощапов Сергій Степанович
МПК: G01R 27/26
Мітки: добротності, частот, здійснення, спосіб, биття, контуру, пристрій, виміру, методом
Формула / Реферат:
1. Спосіб виміру добротності контуру, що полягає в тому, що контур настроюють у резонанс шляхом зміни ємності настроювання, який відрізняється тим, що на вхід контуру подають дві високочастотних напруги з рівними амплітудами і частотами, що незначно відрізняються одна від одної, і розташованими симетрично зліва і справа від частоти виміру, після чого сигнал із виходу контуру посилюють і детектують, при цьому настроювання в резонанс...
Спосіб маркування матеріального тіла, яке рухається, та пристрій для його здійснення
Номер патенту: 26144
Опубліковано: 07.06.1999
Автори: Клемент Роберт Марк, Леджер Невіллє Річард
МПК: B23K 26/04, B23K 26/00
Мітки: спосіб, матеріального, рухається, здійснення, маркування, яке, тіла, пристрій
Формула / Реферат:
1. Способ маркировки движущегося материального тела, при котором направляют пучок с высокой плотностью энергии на маркируемое тело, концентрируют пучок для получения освещенного пятна на участке, расположенном на движущемся теле или внутри него, перемещают это пятно и управляют его перемещением в соответствии с результирующей двух составляющих движения, первая из которых равна скорости движения тела, а вторая соответствует знаку маркировки...
Спосіб диелькометричного виміру вологості сипучих матеріалів і пристрій для його здійснення
Номер патенту: 48438
Опубліковано: 15.08.2002
Автор: Занько Сергій Миколайович
МПК: G01N 27/00, G01N 27/22
Мітки: виміру, спосіб, диелькометричного, вологості, пристрій, сипучих, здійснення, матеріалів
Формула / Реферат:
1. Спосіб диелькометричного виміру вологості сипучих матеріалів, що полягає у вимірі діелектричної проникності двофазного міжелектродного середовища, що складається з досліджуваного сипучого матеріалу і газоповітряного наповнювача при...
Спосіб автоматичного виміру довжини стрибка та пристрій для його здійснення
Номер патенту: 39148
Опубліковано: 15.06.2001
Автори: Канішевський Станислав Михайлович, Попадюха Юрій Андрійович, Карпюк Юрій Іванович, Петрушевський Іван Іванович, Ульянов Володимир Іванович
МПК: A63B 5/00
Мітки: спосіб, довжини, пристрій, здійснення, автоматичного, виміру, стрибка
Формула / Реферат:
1. Спосіб автоматичного обчислення дальності стрибка, який включає визначення координати точки приземлення та обчислення відстані між нею та рискою відштовхування за допомогою оптичного методу, який відрізняється тим, ще координату точки приземлення в зоні приземлення фіксують по пересіченню спортсменом сформованого в цій зоні безпосередньо над поверхнею приземлення поля світлових променів, а довжину стрибка Т обчислюють як суму відстаней S...
Попередній патент: Спосіб розділення криптоно-ксенонового концентрату і пристрій для його здійснення
Наступний патент: Спосіб моделювання гідронефротичної трансформації
Випадковий патент: Спосіб підвищення виходу життєздатних ембріональних плюрипотентних прогенітоорних клітин