Спосіб пуску синхронного двигуна
Номер патенту: 54983
Опубліковано: 15.12.2005
Автори: Півняк Геннадій Григорович, Кириченко Владислав Віталійович, Кириченко Віталій Іванович, Школа Микола Іванович
Формула / Реферат
Спосіб профілактики медикаментозної гастропатії, що включає використання препаратів з антисекреторною дією, який відрізняється тим, що використовують препарат колоїдного вісмуту Де-Нол по 1 таблетці чотири рази на добу за 40 хвилин до їжі.
Текст
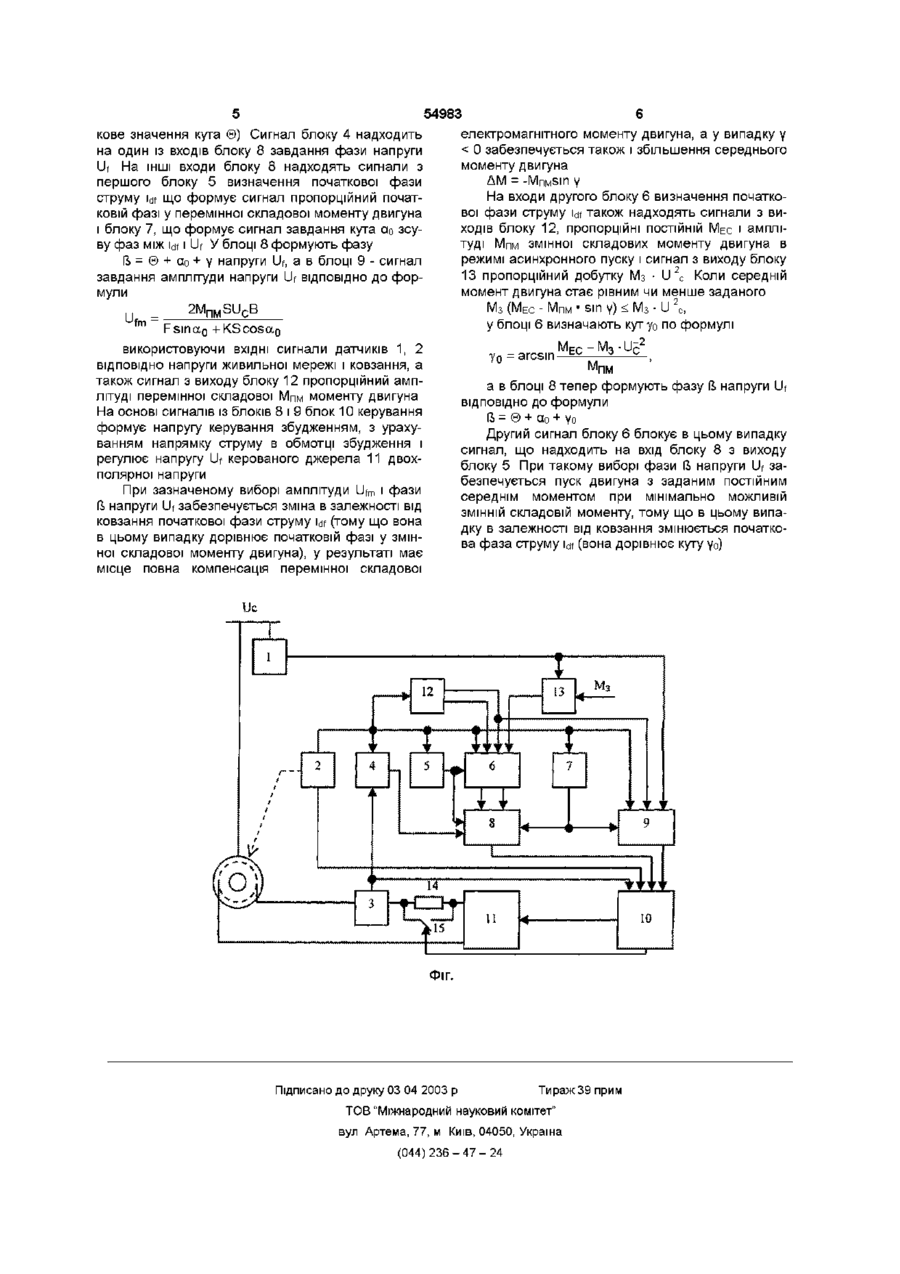
Спосіб пуску синхронного двигуна, при якому вимірюють ковзання ротора, струм обмотки збудження, визначають кутове положення ротора, подають в обмотку збудження синусоїдальну напругу збудження, яка змінюється з частотою ковзання, змінну складову ад початкової фази якої регулюють у залежності від ковзання, приймаючи и значення рівними значенням змінної складової кута зсуву фаз між синусоїдальною напругою збудження і складовою струму статора по подовжній осі, обумовленою зазначеною напругою збудження, при досягненні заданого значення ковзання в обмотку збудження подають постійну напругу, який відрізняється тим, що визначають при вимірі ковзання амплітуду Мпм, початкову фазу у змінної і величину постійної МЕС складових електромагнітного моменту в режимі асинхронного пуску, вимірюють напругу живильної мережі, задають значення Мз моменту і порівнюють його зі значенням середнього моменту двигуна, регулюють у залежності від ковзання амплітуду Ufm і другу у 0 змінну складову початкової фази синусоїдальної напруги збудження, причому амплітуду Ufm визначають за формулою ,, _ 2M n M SU c B Fsma 0 +KScosa 0 —• /Y Y y2 \ _ i+_ D / Y Y \ П—Y Y^ • В- r \ E d t A d - A f - A a d J r \ f t A d - A E d - A d j r - A d - r \ E d , S- ковзання, K=XEdXad-X ad, Uc - напруга живильної мережі, Rf, REd - активні опори ланцюга обмотки збудження і пускової обмотки по подовжній осі, Xf, Xd, XEd, Xad - реактивні опори обмотки збудження, обмоток статора і пускової по подовжній осі й опір взаємної індукції між обмотками статора і ротора по подовжній осі, а значення уо, коли середній момент двигуна більше заданого моменту Мз, приймають рівними значенням початкової фази у змінної складової моменту, а в протилежному разі визначають за формулою a = arcsm 'ЕС a І~2 М З -Іи С 'ПМ CO 0 0 о> ю Винахід відноситься до електротехніки і може бути використаний для зменшення пускових навантажень синхронного електропривода У потужних синхронних електроприводах (наприклад, рудорозмельних млинів) ІЗ пружною механічною частиною при синхронному пуску можливе резонансне посилення коливань моменту на валу в зоні частот обертання ротора двигуна (зона резонансу), коли частота власних коливань механічної частини електропривода fu « fn (де fn - частота змінної складової моменту двигуна) Тому актуальними є міри, спрямовані на зниження змінної складової моменту двигуна під час пуску Відомий спосіб пуску синхронного двигуна, базується на подачі в обмотку збудження напруги, що змінюється з частотою ковзання в сполученні з дискретною зміною пускового опору, спрямований на підвищення постійної складової моменту двигуна При використанні цього способу спостерігаються значні коливання електромагнітного моменту двигуна, що приводить до неприпустимих перевантажень у синхронному електроприводі з пружною механічною частиною при проходженні зони резонансу (Пат РФ 2014720 Способ пуска и самозапуска синхронного электродвигателя/ Г В Сивокобыленко, Г В Краснокутская - Б И , 1994, №11) Недолік- зазначений спосіб не знайшов широкого застосування через складність його реалізації 54983 Найбільш близьким до способу, що заявляється, є спосіб пуску синхронного двигуна (Урусов Н Д и Камша М М Анализ некоторых способов улучшения асинхронных характеристик синхронных двигателей для обеспечения их синхронизации Изв АН СССР, Энергетика и транспорт, 1979, №4, с 83-91) По цьому способі в області малих ковзань на обмотку збудження подається синусоїдальна напруга Uf, що змінюється з частотою ковзання ротора, амплітуда Ufm якої залишається постійною Перемінну складову ао початкової фази а = ао- 90° напруги Uf регулюють зі зміною ковзання, причому кут ао є також змінною складовою кута \ао -180°\ зсуву фаз між напругою Uf і складовою idf струму id статора по подовжній осі, що з'являється за рахунок подачі напруги Uf Спосіб спрямований на максимальне збільшення середнього моменту двигуна при використанні циклічного збудження, тому що забезпечує незмінну оптимальну початкову фазу (90°) струму idf, при якій спостерігається максимальне збільшення постійної складової моменту при будь-якому значенні ковзання Недоліком способу є значне збільшення амплітуди змінної складової електромагнітного моменту двигуна, що веде до небезпечного резонансного посилення коливань моменту на валу синхронного електропривода з пружними зв'язками В основу винаходу поставлена задача удосконалення способу пуску синхронного двигуна, у якому шляхом зміни параметрів змінної напруги збудження забезпечується зниження змінної складової моменту двигуна при підтримці постійної складової моменту двигуна на рівні не нижче заданого, і за рахунок цього зниження пускових навантажень синхронних електроприводів Задача вирішується тим, що у відомому способі пуску синхронного двигуна, при якому вимірюють ковзання ротора, струм обмотки збудження, визначають кутове положення ротора, подають в обмотку збудження синусоїдальну напругу збудження, яка змінюється з частотою ковзання, змінну складову ао початкової фази якої регулюють у залежності від ковзання, приймаючи и значення рівними значенням змінної складової кута зсуву фаз між синусоїдальною напругою збудження і складовою струму статора по подовжній осі, обумовленою напругою збудження, при досягненні ковзанням заданого значення в обмотку збудження подають постійну напругу, що відрізняється тим, що визначають при вимірі ковзання амплітуду Мпм початкову фазу у змінної і величину постійної МЕС складових електромагнітного моменту в режимі асинхронного пуску, вимірюють напругу живильної мережі, задають значення Мз моменту і порівнюють його зі значенням середнього моменту двигуна, регулюють у залежності від ковзання амплітуду Ufm і другу уо перемінну складову початкової фази синусоїдальної напруги збудження, причому амплітуду Ufm визначають по формулі 2M n M SU c B Ufm = fm Fsma 0 +KScosa 0 де В = Red (Xd • Xf - X2ad)+ Rf (Xd F - Xad " Red, S-ковзання, - X асі), 4 К = Xed Xad — X ad , Uc - напруга живильної мережі, Rf, Red - активні опори ланцюга обмотки збудження і пускової обмотки по подовжній осі, Xf, Xd, Xed, Xad реактивні опори обмотки збудження, обмоток статора і пускової по подовжній осі й опір взаємної індукції між обмотками статора і ротора по подовжній осі, а значення уо , коли середній момент двигуна більше заданого моменту Мз, приймають рівними значенням початкової фази у перемінної складової моменту, а в противному випадку визначають по формулі = arcsm 'ЕС Із • (2) 'пм З сучасного рівня техніки не відоме використання початкової фази у, амплітуди Мпм змінної і величини МЕС ПОСТІЙНОЇ складових електромагнітного моменту синхронного двигуна при асинхронному пуску із замкнутою на пусковий опір обмоткою збудження, напруги живильної мережі при визначенні початкової фази й амплітуди синусоїдальної напруги збудження при циклічному збудженні Отже технічне рішення, що заявляється, має винахідницький рівень На фіг наведено пристрій, що реалізує пропонований спосіб Пристрій складається з датчиків 1,2,3 ВІДПОВІДНО напруги живильної мережі, ковзання і струму збудження, блоку 4 визначення кута ©, першого 5 і другого 6 блоків визначення початкової фази струму idf блоку 7 завдання кута ао зсуву фаз струму idf і напруги Uf на входи блоків 4,5,6 і 7 подається сигнал від датчика ковзання, блоку 8 завдання фази напруги Uf, на входи якого надходять сигнали блоків 4,5,6 і 7, блоку 9 завдання амплітуди напруги Uf на входи якого надходять сигнали блоків 1,2 і 7, блоку керування 10, на входи якого надходять сигнали блоків 2,3,8 і 9, керованого джерела 1 1 двохполярної напруги, на вхід якого надходять сигнали блоку 10, блоку 12 визначення постійної і змінної складових моменту двигуна, на вхід якого надходять сигнали блоку 2, нелінійного елемента 13, пускового опору 14 і комутатора 15 Спосіб полягає в наступному На початку пуску обмотку статора синхронного двигуна з обмоткою збудження, замкнутою на пусковий опір 14, підключають до напруги живильної мережі Uc Починається розгін двигуна, у процесі якого вимірюють ковзання ротора по якому визначають початкову фазу у (блок 5), амплітуду М п н перемінної і величину МЕС ПОСТІЙНОЇ складових моменту двигуна з обмоткою збудження, замкнутою на пусковий опір (блок 12), а також кут ао зсуву фаз між напругою збудження і складовою idf струму статора по подовжній осі, обумовленою напругою Uf (блок 7) Вимірюють струм обмотки збудження (блок 3), напругу живильної мережі (блок 1) і задають значення Мз моменту (блок 13) У блоці 4 формується сигнал пропорційний кутовому положенню ротора (кут ©) і включають його в роботу після досягнення заданого значення ковзання, строго в момент переходу струму в обмотці збудження через нуль в область позитивних значень (у такий спосіб забезпечується задане почат 54983 кове значення кута ©) Сигнал блоку 4 надходить на один із входів блоку 8 завдання фази напруги Uf На ІНШІ входи блоку 8 надходять сигнали з першого блоку 5 визначення початкової фази струму idf що формує сигнал пропорційний початковій фазі у перемінної складової моменту двигуна і блоку 7, що формує сигнал завдання кута сіо зсуву фаз між idf і Uf У блоці 8 формують фазу 3 = © + сіо + у напруги Uf, а в блоці 9 - сигнал І> завдання амплітуди напруги Uf ВІДПОВІДНО ДО формули ,, _ 2M n M SU c B електромагнітного моменту двигуна, а у випадку у < 0 забезпечується також і збільшення середнього моменту двигуна ДМ = -Mnivisin у На входи другого блоку 6 визначення початкової фази струму idf також надходять сигнали з виходів блоку 12, пропорційні ПОСТІЙНІЙ МЕС І амплітуді Мпм змінної складових моменту двигуна в режимі асинхронного пуску і сигнал з виходу блоку 13 пропорційний добутку U с Коли середній момент двигуна стає рівним чи менше заданого М з ( М Е С М П м • s i n у ) ВІДПОВІДНО до формули 1 = © + а0 + уо 5 Другий сигнал блоку 6 блокує в цьому випадку сигнал, що надходить на вхід блоку 8 з виходу блоку 5 При такому виборі фази 3 напруги Uf заІ> безпечується пуск двигуна з заданим постійним середнім моментом при мінімально можливій ЗМІННІЙ складовій моменту, тому що в цьому випадку в залежності від ковзання змінюється початкова фаза струму idf (вона дорівнює куту уо) Uc 12 І М у блоці 6 визначають кут уо по формулі Fsma 0 +KScosa 0 використовуючи ВХІДНІ сигнали датчиків 1, 2 ВІДПОВІДНО напруги живильної мережі і ковзання, а також сигнал з виходу блоку 12 пропорційний амплітуді перемінної складової Мпм моменту двигуна На основі сигналів із блоків 8 і 9 блок 10 керування формує напругу керування збудженням, з урахуванням напрямку струму в обмотці збудження і регулює напругу Uf керованого джерела 11 двохполярної напруги При зазначеному виборі амплітуди Ufm і фази 3 напруги Uf забезпечується зміна в залежності від І> ковзання початкової фази струму idf (тому що вона в цьому випадку дорівнює початковій фазі у змінної складової моменту двигуна), у результаті має місце повна компенсація перемінної складової 1 ! 1 Фіг. Підписано до друку 03 04 2003 р Тираж 39 прим ТОВ "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)236-47-24
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for starting synchronous motor
Автори англійськоюPivniak Hennadii Hryhorovych, Kyrychenko Vladyslav Vitaliiovych, Kyrychenko Vitalii Ivanovych
Назва патенту російськоюСпособ пуска синхронного электродвигателя
Автори російськоюПивняк Геннадий Григорьевич, Кириченко Владислав Витальевич, Кириченко Виталий Иванович
МПК / Мітки
МПК: H02P 1/16
Мітки: синхронного, двигуна, спосіб, пуску
Код посилання
<a href="https://ua.patents.su/3-54983-sposib-pusku-sinkhronnogo-dviguna.html" target="_blank" rel="follow" title="База патентів України">Спосіб пуску синхронного двигуна</a>
Спосіб пуску синхронного двигуна
Номер патенту: 41735
Опубліковано: 17.09.2001
Автори: Нізімов Родіон Вікторович, С'янов Олександр Михайлович, Нізімов Віктор Борисович
МПК: H02P 1/16
Мітки: пуску, двигуна, синхронного, спосіб
Формула / Реферат:
1. Спосіб пуску синхронного двигуна, при якому синхронний двигун підмикають до мережі змінного струму через тиристорний перетворювач із природною комутацією, обмотку збудження підключають до пускового резистора, подають в обмотки статора імпульси струму, величина і тривалість яких формується різницею між дійсною і заданою величинами пускового струму статора, впливом на тиристорний перетворювач, який відрізняється тим, що роблять заряд...
Спосіб пуску синхронного двигуна з блоком пуску
Номер патенту: 9850
Опубліковано: 30.09.1996
Автори: Количев Сергій Вікторович, Нізімов Віктор Борисович
МПК: H02P 1/16
Мітки: синхронного, пуску, блоком, двигуна, спосіб
Формула / Реферат:
1. Способ пуска синхронного двигателя с блоком пуска, выполненным в виде последовательно соединенных пускового резистора и блока емкостной компенсации, при котором подключают статор к сети и замыкают обмотку возбуждения на пусковой блок, отличающийся тем, что определяют полярность ЭДС и тока ротора при различной их полярности шунтируют блок емкостной компенсации.2. Способ пуска синхронного двигателя по п.1, отличающийся тем, что при...
Система запуску синхронного двигуна групи г-д
Номер патенту: 36065
Опубліковано: 16.04.2001
Автори: Пасмурских Олександр Олексійович, Вошун Олексій Миколайович, Добрецов Володимир Валентинович, Луговой Анатолій Васильович, Долженко Віктор Володимирович, Родькін Дмитро Йосипович, Чорний Олексій Петрович, Шварцман Ернст Володимирович
МПК: H02P 7/06
Мітки: г-д, двигуна, система, групи, запуску, синхронного
Формула / Реферат:
Система запуску синхронного двигуна групи Г-Д, що включає синхронний двигун, тиристорний двигун, тиристорний перетворювач, генератор постійного струму із збуджувачем, контакторний апарат, що з'єднує якірний ланцюг генератора з тиристорним перетворювачем, яка відрізняється тим, що додатково обладнана датчиками напруги і струму тиристорного перетворювача, датчиком струму збудження генератора, обчислювальним блоком з чотирма входами, причому...
Спосіб пуску асинхронного двигуна
Номер патенту: 8075
Опубліковано: 15.07.2005
Автори: Некрасов Андрій Вікторович, Решетняк Анатолій Володимирович
МПК: H02P 1/00
Мітки: асинхронного, спосіб, пуску, двигуна
Формула / Реферат:
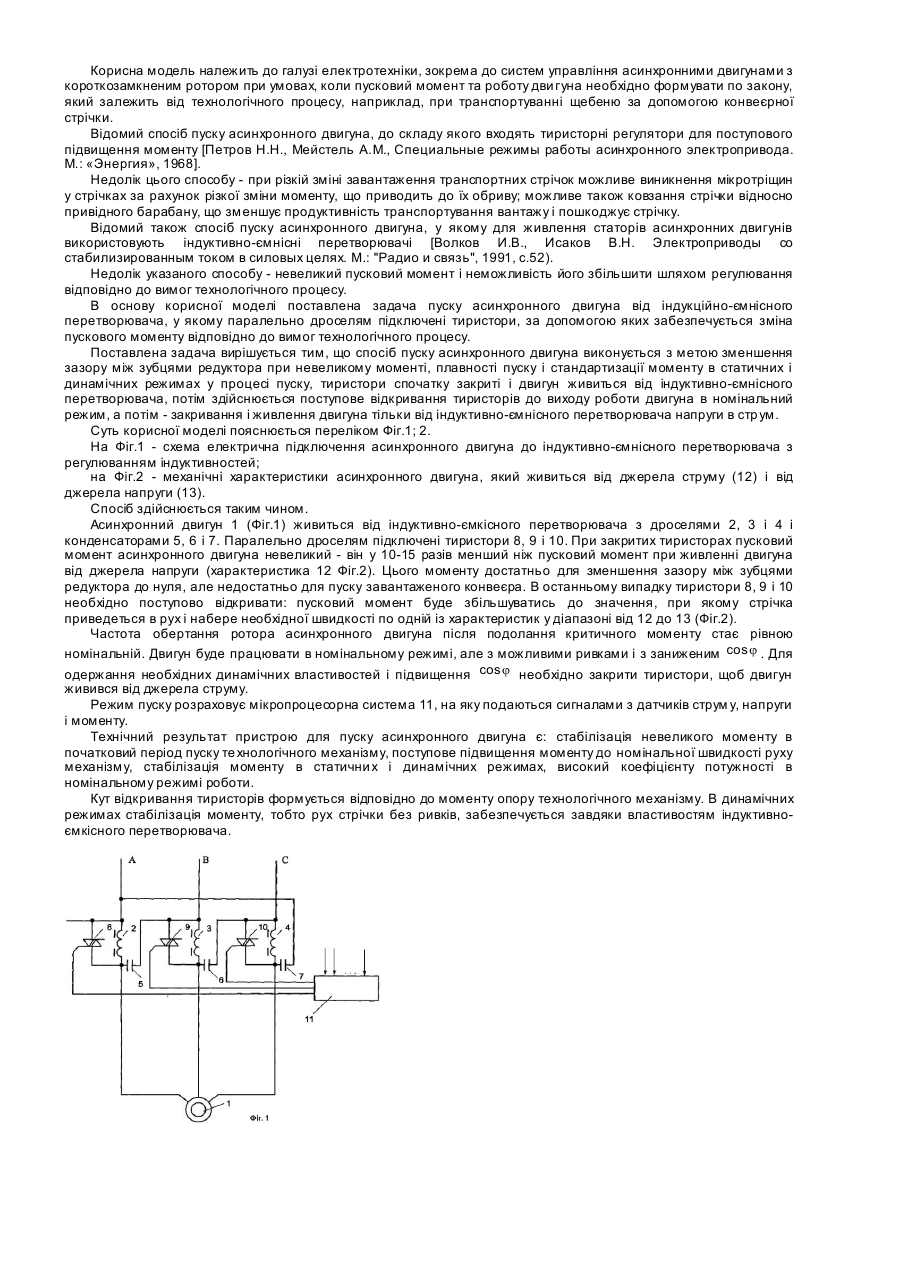
Спосіб пуску та живлення асинхронного двигуна з короткозамкненим ротором, який полягає в підключенні обмоток статора двигуна до трифазної мережі через індуктивно-ємнісний перетворювач, у якому паралельно дроселям включені тиристори, і в контролі процесу запуску у функції моменту або струму, який відрізняється тим, що для зменшення зазору між зубцями редуктора при невеликому моменті, плавності пуску і стандартизації моменту в статичних і...
Система запуску та контролю режимів роботи синхронного двигуна групи г-д
Номер патенту: 50114
Опубліковано: 15.10.2002
Автори: Чорний Олексій Петрович, Вошун Олексій Миколайович, Пасмурских Олександр Олексійович, Родькін Дмитро Йосипович, Зубова Олена Іванівна, Марченко Андрій Бронікович
МПК: H02P 7/06
Мітки: режимів, контролю, синхронного, двигуна, г-д, запуску, групи, роботи, система
Формула / Реферат:
1. Система запуску та контролю режиму роботи синхронного двигуна групи Г-Д, яка вмикає синхронний двигун з вимикачем у мережі статора, збуджувачем у мережі збудження та генератором постійного струму на валу, джерела живлення якірної мережі генератора з комутуючим апаратом, контакторний апарат в мережі живлення двигуна, перетворювачі для живлення обмотки збудження та якірної мережі на період пуску, яка відрізняється тим, що для спрощення...
Попередній патент: Рушій літального апарата
Наступний патент: Система кулькового очищення конденсаторних трубок
Випадковий патент: Фунгiцидна композицiя