Спосіб магнітокерованої електрошлакової плавки титанових сплавів
Номер патенту: 55560
Опубліковано: 15.04.2003
Автори: Протоковілов Ігор Вікторович, Компан Ярослав Юрійович

Формула / Реферат
Спосіб магнітокерованої електрошлакової плавки титанових сплавів, який включає плавку витратного електроду і кристалізацію зливка в кристалізаторі з використанням зовнішнього поздовжньо-радіального магнітного поля, який відрізняється тим, що в нижніх шарах шлакової ванни, по її периферії, утворюють зону для осадження шкідливих включень, а зовнішнє поздовжньо-радіальне магнітне поле концентрують в верхніх шарах шлакової ванни та забезпечують обертальний рух розплаву, що призводить до направленого переміщення рідкого електродного металу в зону осадження, а також - до її заповнення та наступного осадження шкідливих включень в цій зоні, при цьому металеву ванну формують із рідкого металу, що перетікає в неї при переповненні зони осадження, верхній рівень якої знаходиться вище дзеркала металевої ванни.
Текст
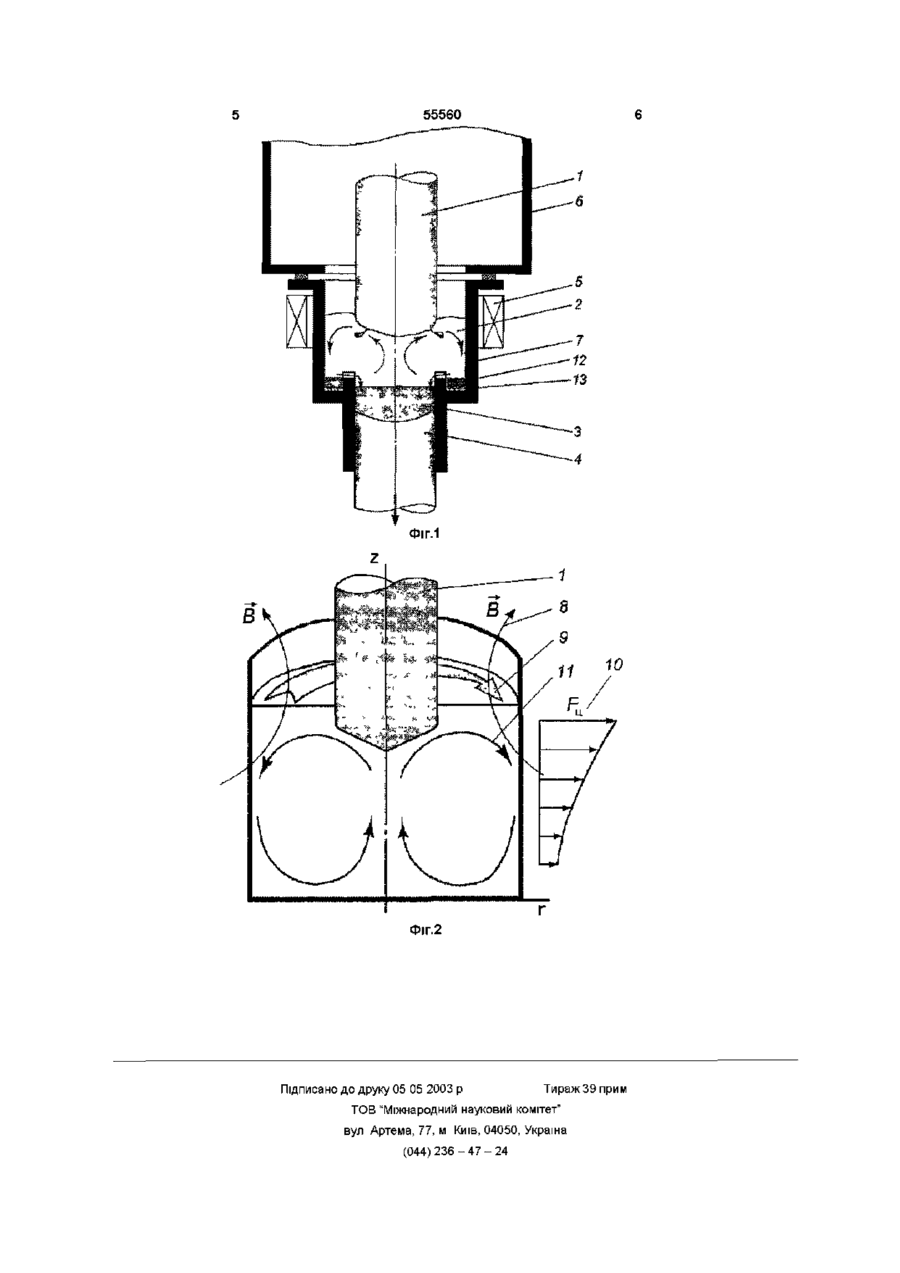
Спосіб магнітокерованої електрошлакової плавки титанових сплавів, який включає плавку витратного електроду і кристалізацію зливка в кристалізаторі з використанням зовнішнього Винахід належить до області металурги, а саме до магнітокерованої електрошлакової плавки, і може знайти застосування в виробництві титанових сплавів Відомий спосіб магнітокерованої електрошлакової плавки титану і сплавів на його основі, який включає в себе плавку витратного електроду і кристалізацію зливка в кристалізаторі під впливом зовнішнього радіального магнітного поля (патент США №6113666, 9/2000) Цей спосіб дозволяє отримувати титанові зливки з високою ХІМІЧНОЮ і фізичною однорідністю і дрібнозернистою кристалічною структурою металу Він також дозволяє ефективно розчиняти і виводити в гарнісажну скоринку оксинітриди титану - дефекти типу LDI (Low Density Inclusions) Однак, одним з недоліків цього способу є низька ефективність видалення тугоплавких шкідливих включень високої ЩІЛЬНОСТІ - так званих дефектів типу HDI (High Density Inclusions) Ці дефекти являють собою включення на основі WC, МоС та ш , які потрапляють в металургійну ванну з шихтовими компонентами Наявність таких дефектів в металі значно погіршує його ресурсні характеристики В основу винаходу покладене завдання, створити такий спосіб магнітокерованої електрошлакової плавки титанових сплавів, який ПЛАВКИ ТИТАНОВИХ СПЛАВІВ поздовжньо-радіального магнітного поля, який відрізняється тим, що в нижніх шарах шлакової ванни, по її периферії, утворюють зону для осадження шкідливих включень, а зовнішнє поздовжньо-радіальне магнітне поле концентрують в верхніх шарах шлакової ванни та забезпечують обертальний рух розплаву, що призводить до направленого переміщення рідкого електродного металу в зону осадження, а також до її заповнення та наступного осадження шкідливих включень в цій зоні, при цьому металеву ванну формують із рідкого металу, що перетікає в неї при переповненні зони осадження, верхній рівень якої знаходиться вище дзеркала металевої ванни завдяки особливостям течій металургійного розплаву та наявності зони осадження дозволив би видаляти HDI включення з металу зливка і за рахунок цього покращити його експлуатаційні показники Поставлене завдання вирішується тим, що у способі магнітокерованої електрошлакової плавки титанових сплавів, який включає плавку витратного електроду та кристалізацію зливка в кристалізаторі з використанням зовнішнього поздовжньо-радіального магнітного поля, ВІДПОВІДНО винаходу в нижніх шарах шлакової ванни, по її периферії, створюють зону для осадження шкідливих включень, а зовнішнє поздовжньо-радіальне магнітне поле концентрують в верхніх шарах шлакової ванни та забезпечують обертальний рух розплаву, що призводить до направленого переміщення рідкого електродного металу в зону осадження, а також до її заповнення та наступного осадження шкідливих включень в цій зоні, при цьому, металеву ванну формують із рідкого металу, що перетікає в неї при переповненні зони осадження, верхній рівень якої знаходиться вище дзеркала металевої ванни Використання зовнішнього поздовжньорадіального магнітного поля, яке зосереджене в верхніх шарах шлакової ванни, дозволяє створити О о (О ю ю ю 55560 в шлаковій ванні електровихрові течи, які виносять електродні краплини на периферію шлакової ванни і потім в зону осадження, де HDI включення осідають у вигляді металевого гарнісажу Спосіб магнітокерованої електрошлакової плавки титанових сплавів пояснюється фігурами 1 і2 На фіг 1 схематично зображений пристрій для здійснення способу згідно винаходу, а на фіг 2 схематичне зображення характеру обертання шлакового розплаву при магнітокерованій електрошлаковій плавці Сутність способу заключається в наступному Електричний струм пропускають через витратний електрод 1 (фиг 1), шлакову ванну 2, металеву ванну 3 і метал зливка 4 В результаті проходження скрізь шлакову ванну електричного струму, в ній виділяється основне тепло, так як питомий опір рідкого шлаку на 2-3 порядки більше опору твердого і розплавленого металу Витратний електрод розплавляється в шлаковій ванні з утворенням металевої ванни і подальшим формуванням зливка Процес плавлення металу здійснюється під впливом зовнішнього магнітного поля, створеного електромагнітним пристроєм 5 Зона плавлення металу та розігрітий до високої температури електрод ізольовані від атмосфери вакуумною камерою 6, і герметично з'єднаним з нею Тобразним кристалізатором 7 Перед плавкою плавильна камера піддається вакуумуванню, а потім заповнюється інертним газом В процесі плавки електричний струм, який має ЩІЛЬНІСТЬ J взаємодіє з ЗОВНІШНІМ, створеним електромагнітною системою, магнітним полем В _ утворюючи електромагнітні сили е в розплаві Fe = ]хВ Так як в циліндричних координатах z, r, cp електричний струм має складові (j z , j r , 0), а зовнішнє магнітне поле - (B z , Br, 0), то Fe =J JxB , е електромагнітна сила буде мати Fe =(0,0,uB r - j r B/ z ) -,- _ е v JZ r Jr z складові Тобто зовнішнє магнітне поле 8 (фіг 2) при взаємодії зі струмом плавки створює азимутальну електромагнітну силу, яка призводить до обертання розплаву навколо ВІСІ симетрії як це показано стрілкою 9 При цьому, складові електромагнітної сили j z B r і j r B z діють в одному напрямку Якщо, зовнішнє поздовжньо-радіальне поле зосередити в верхніх шарах шлакової ванни, то це поле там буде мати найбільше значення індукції, і ВІДПОВІДНО обертання розплаву у верхніх шарах ванни буде максимальним Розплав шлаку буде відкидатися від ВІСІ ванни з більшою силою в верхніх шарах ванни і з меншою - в нижніх Під дією розподіленою таким чином відцентрової сили, яка умовно зображена позицією 10, розплав приходить до руху, показаного стрілкою 11, в площині z-r Наявність такого руху в шлаковій ванні призводить до того, що краплини розплавленого металу та нерозчинені включення під дією відцентрових сил та течій шлаку, потрапляють спочатку в зону осадження 12, яка може бути виконана у вигляді канавки, а потім через прорізи перетікають в металеву ванну При цьому, ШКІДЛИВІ HDI включення осідають в канавці у вигляді металевого гарнісажу 13 Оптимальне значення індукції зовнішнього магнітного поля визначається окремо, для кожного конкретного випадку, виходячи з типорозміру електроду, зливка, складу флюсу та електроду, та конструктивних особливостей кристалізатора Приклад 3 використанням запропонованого способу і способу прототипу було виплавлено 6 зливків титанового сплаву ВТ22 Витратні електроди були виконані в вигляді прутків діаметром 105мм, в центральну частину яких навмисно вводили включення WC В таблиці наведені режими плавок і результати досліджень наявності в зливках включень WC Таблиця № п/п 1 2 3 4 5 6 Спосіб плавки Спосіб Прототип Запропонований Спосіб Сила струму плавки, А Індукція магнітного поля, Тл 7000 6500 7000 7000 6500 6500 0,6 0,8 0,4 0,6 0,8 1,0 Як видно із Таблиці, використання запропонованого способу плавки на оптимальних КІЛЬКІСТЬ КІЛЬКІСТЬ включень в електроді включень в зливку 5 5 Характеристика процесу Сталий Сталий Сталий сталий сталий несталий режимах, дозволило виділити приблизно 80% шкідливих HDI включень, в той час, як спосіб прототип тільки 15% 6 6 55560 В Фіг.2 Підписано до друку 05 05 2003 р Тираж 39 прим ТОВ "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)236-47-24
ДивитисяДодаткова інформація
Назва патенту англійськоюA process for the titanium alloys magnet controlled electroslag melting
Назва патенту російськоюСпособ магнитоуправляемой электрошлаковой плавки титановых сплавов
МПК / Мітки
МПК: C22B 9/18
Мітки: титанових, спосіб, магнітокерованої, плавки, сплавів, електрошлакової
Код посилання
<a href="https://ua.patents.su/3-55560-sposib-magnitokerovano-elektroshlakovo-plavki-titanovikh-splaviv.html" target="_blank" rel="follow" title="База патентів України">Спосіб магнітокерованої електрошлакової плавки титанових сплавів</a>
Флюс для плавки та рафінування магнію та його сплавів
Номер патенту: 36141
Опубліковано: 16.04.2001
Автори: Герб Андрій Павлович, Баранник Іван Андрійович, Комелін Ігор Михайлович, Петрів Михайло Іванович
МПК: C22B 9/10, C22B 26/00
Мітки: сплавів, флюс, магнію, плавки, рафінування
Текст:
...5(NаF) 0,3 4 35 39,5 20 5(МgF2) 0,5 5 40 38,0 6 8 2 5(СаF2) 1,0 6 20 19,7 20 35 5(СаF2) 0,3 Таблиця 2. Результати дослідних плавок Метал, що рафінується Склад флюсу 1 2 3 Магній Сплав магнію Сплав магнію №1 №2 №3 98,1 97,0 97,3 не має не має не має 6 8 7 4 Сплав магнію №4 97,5 одне включення 6 5 Сплав магнію №5 97,0 не має 7 96,5 три цяточних включення 11 6 Сплав магнію Вихід...
Пристрій електрошлакової переплавки та спосіб електрошлакової переплавки

Номер патенту: 51774
Опубліковано: 16.12.2002
Автори: Медовар Борис Ізраїльович, Патон Борис Євгенович, Цикуленко Анатолій Костянтинович, Федоровський Борис Борисович, Шевченко Віталій Юхимович, Грабівський Цезарій Францович, Ус Василь Іванович, Чернець Олександр Владиславович, Ланцман Ізраїль Абович, Медовар Лев Борисович, Саєнко Володимир Якович
МПК: B22D 11/04, B22D 19/16, C22B 9/18, C22B 9/187
Мітки: переплавки, електрошлакової, спосіб, пристрій
Формула / Реферат:
1. Пристрій електрошлакової переплавки, що містить струмопідвідний кристалізатор, щонайменше один витратний електрод, розташований уздовж вертикальної осі кристалізатора, джерело живлення й електричний ланцюг кристалізатора, що з'єднує струмопідвідний кристалізатор із джерелом живлення, який відрізняється тим, що містить додаткове джерело живлення й електричний ланцюг витратного електрода, що з'єднує згаданий щонай- менше один витратний...
Спосіб плавки і лиття активних та тугоплавких металів і сплавів та пристрій для його реалізації
Номер патенту: 44460
Опубліковано: 15.02.2002
Автори: Добкина Юлія Георгіївна, Левицький Микола Іванович, Вербило Марія Олексіївна, Аникін Юрій Пилипович, Мірошниченко Володимир Іванович
МПК: B22D 11/113, B22C 23/00
Мітки: металів, реалізації, спосіб, тугоплавких, плавки, сплавів, активних, пристрій, лиття
Формула / Реферат:
1. Спосіб плавки і лиття активних та тугоплавких металів і сплавів, що включає завантаження шихти в завантажувальний механізм, вакуумування її з подальшим завантаженням в плавильний тигель, який відрізняється тим, що шихту нагрівають, причому, поступово: спочатку до температури, що становить 0,1 – 0,5 Тпл, а потім 0,5-0,9 Тпл.2. Пристрій для плавки і лиття активних та тугоплавких металів і сплавів, що включає в себе плавильну камеру,...
Пристрій для електрошлакової виплавки порожнистих зливків

Номер патенту: 35800
Опубліковано: 16.04.2001
Автори: Дудник Михайло Іванович, Комнацький Олександр Леонідович, Бондаренко Леонід Іванович, Корнійчук В'ячеслав Анатолійович, Гладкий Євген Дмитрович, Марченко Олександр Михайлович, Москалик Микола Вікторович, Адєєв Дмитро Вадимович
Мітки: порожнистих, зливків, електрошлакової, пристрій, виплавки
Формула / Реферат:
1. Пристрій для електрошлакової виплавки порожнистих зливків, що складається з кристалізатора і дорна з кронштейнами, які одночасно виконують роль патрубків підведення та відведеная охолоджувача всистемі охолодження дорна, з допомогою яких він жорстко кріпиться в середині кристалізатора в зоні шлакової ванни, який відрізняється тим, що верхня грань кронштейнів розташовується в одній площини з верхньою поверхнею дорна, створюючи таким...
Спосіб одержання порошків-гранул з титанових сплавів
Номер патенту: 50981
Опубліковано: 15.11.2002
Автори: Гріга Юдіт, Петрунько Анатолій Миколайович, Дрозденко Віктор Антонович, Джонс Михайло Михайлович, Дрозденко Ганна Вікторівна
МПК: B22F 9/08
Мітки: порошків-гранул, сплавів, одержання, спосіб, титанових
Формула / Реферат:
Спосіб одержання порошків-гранул з титанових сплавів, що включає диспергування розплавленого металу з заглиблення робочого інструменту, який відрізняється тим, що метал розплавляють безпосередньо в заглибленні робочого інструменту, якому надають коливання з частотою 10-1000 сек-1, що диспергують розплавлений метал на окремі краплини, які твердіють при вільному падінні у вигляді частинок сферичної форми.
Попередній патент: Оправа для встановлення на аерозольному контейнері
Наступний патент: Схемний пристрій з дезактивовуваним сканувальним ланцюгом
Випадковий патент: Процес отримання термоелектричного матеріалу на основі bi-te-se-sb