Ультразвуковий пристрій для вимірювання рівня середовищ з нерівномірною поверхнею
Номер патенту: 59060
Опубліковано: 10.05.2011
Автори: Євсюков Володимир Володимирович, Стенцель Йосип Іванович, Томсон Андрій Владиславович
Формула / Реферат
Ультразвуковий пристрій для вимірювання рівня середовищ з нерівномірною поверхнею, що включає послідовно з'єднані п'єзокерамічний випромінювач, підсилювач, компаратор, мікроконтролер, регульоване джерело імпульсів збудження, яке з'єднане з п'єзокерамічним випромінювачем, при цьому компаратор з'єднаний з джерелом опорної напруги, мікроконтролер - з блоком обробки та індикації, а блок визначення амплітуди сигналу - з підсилювачем і мікроконтролером, який відрізняється тим, що мікроконтролер виконаний з можливістю зменшення похибки вимірювання рівня середовищ з нерівномірною поверхнею залежно від амплітуди фонового сигналу, визначеної блоком визначення амплітуди сигналу.
Текст
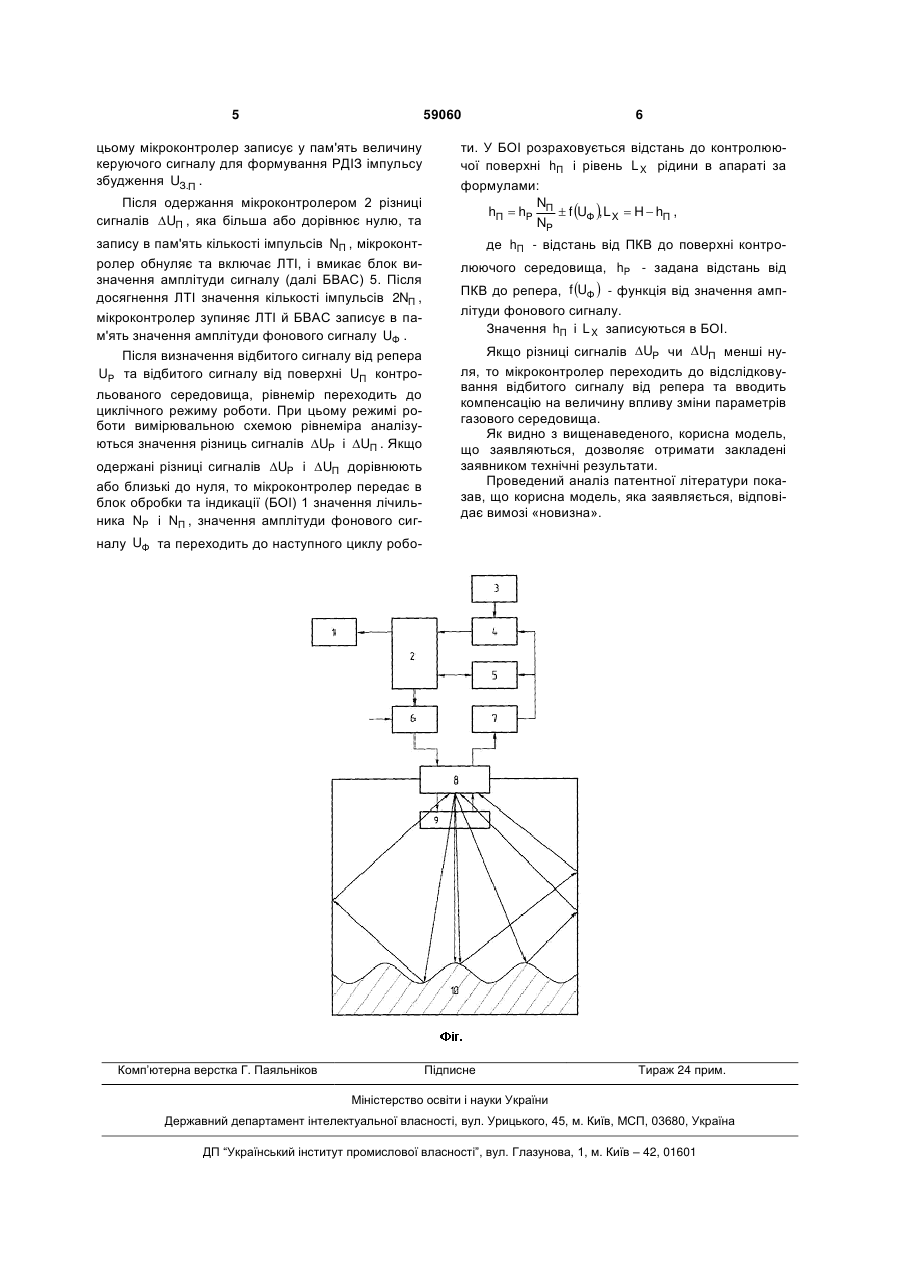
Ультразвуковий пристрій для вимірювання рівня середовищ з нерівномірною поверхнею, що 3 та індикації, а блок визначення амплітуди сигналу - з підсилювачем і мікроконтролером відрізняється тим, що мікроконтролер виконаний з можливістю зменшення похибки вимірювання рівня середовищ з нерівномірною поверхнею у залежності від амплітуди фонового сигналу, визначеної блоком визначення амплітуди сигналу. Запропонована корисна модель ультразвукового пристрою має блок визначення сигналу для визначення амплітуди фонового сигналу, який при визначенні часу проходження ультразвуковим імпульсом подвійної відстані від п'єзокерамічного випромінювача до поверхні середовища та часу проходження ультразвуковим імпульсом подвійної відстані від п'єзокерамічного випромінювача до реперної пластини змінює амплітуду випроміненого імпульсу в залежності від виміряного рівня таким чином, щоб амплітуда прийнятого ультразвукового імпульсу залишалася постійною. На фіг. приведена блок-схема для реалізації запропонованого пристрою, де: 1. блок обробки інформації та індикації; 2. мікроконтролер; 3. джерело опорної напруги; 4. компаратор; 5. блок визначення амплітуди сигналу; 6. регульоване джерело імпульсів збудження; 7. підсилювач; 8. п'єзокерамічний випромінювач; 9. реперна пластина; 10. контрольоване середовище. Запропонована корисна модель ультразвукового пристрою для вимірювання рівня середовищ з нерівномірною поверхнею працює наступним чином. Після включення ультразвукового пристрою в роботу мікроконтролер 2 видає керуючий сигнал на регулююче джерело імпульсів збудження (далі РДІЗ) 6, який формує і видає одиничний імпульс з мінімальним значенням напруги на п'єзокерамічний випромінювач (далі ПКВ) 8. Одночасно обнуляється і включається лічильник тактових імпульсів (далі ЛТІ). При цьому ПКВ генерує ультразвуковий імпульс такої амплітуди, щоб при його розповсюдженні у повітрі при нормальних умовах різниця між ультразвуковим сигналом UP (відбитим від репера 9, прийнятим та перетвореним ПКВ в електричний сигнал і підсиленим підсилювачем 7) і сигналом джерела опорної напруги UОП (далі ДОН) 3 дорівнювала б нулю. Різниця між цими сигналами визначається компаратором 4, перший вхід якого з'єднаний з підсилювачем 7, другий - з ДОН 3, а вихід - з мікроконтролером 2. При роботі рівнеміра в середовищі, відмінному від повітря, або при роботі в повітрі з параметрами, відмінними від нормальних умов, відбитий сигнал UP від репера 9 може бути більшим або меншим сигналу UОП з ДОН. Якщо різниця сигналів UP UОП UP на виході компаратора 3 більша або дорівнює нулю, то мікроконтролер 2 зупиняє ЛТІ і записує у пам'ять кількість відрахованих імпульсів NP і різницю сигналів UP . 59060 4 Якщо різниця сигналів UP менша нуля, то мікроконтролер зупиняє ЛТІ після досягнення кількості імпульсів NP max , що відповідає часу проходження ультразвуковим імпульсом відстані, яка в 4 рази перевищує відстань від репера до ПКВ у повітрі при нормальних умовах. Мікроконтролер видає керуючий сигнал на РДІЗ, який формує та видає на ПКВ імпульс збудження UЗ.P , який більший попереднього на UЗ . Одночасно обнуляється та включається ЛТ1. Якщо мікроконтролер одержує різницю сигналів UP , яка є більшою або дорівнює нулю до досягнення ЛТІ кількості імпульсів NP max , то мікроконтролер зупиняє ЛТІ і записує в пам'ять кількість імпульсів NP , різницю сигналів UP та керуючий сигнал для формування РДІЗ імпульсу збудження UЗ.P . У протилежному випадку мікроконтролер виконує попередню послідовність дій. На цьому закінчується перший етап роботи рівнеміра - визначення відбитого сигналу від репера. Другий етап роботи рівнеміра починається з того, що визначається величина відбитого сигналу від поверхні контрольованого середовища 10. Мікроконтролер 2 обнуляє та включає ЛТІ, подає керуючий сигнал на РДІЗ 6, який формує та подає на ПКВ 8 імпульс збудження UЗ.П , який більший попереднього імпульсу збудження UЗ.P на величину UЗ . Ультразвукові імпульси (перший відбитий від репера 9, а другий від поверхні контрольованого середовища 10) приймаються та перетворюються ПКВ відповідно в електричні сигнали UP та UП і підсилюються підсилювачем 7. Якщо різниця сигналів UП UОП UП на виході компаратора 4 стане більшою або дорівнює нулю, то мікроконтролер зупиняє ЛТІ і записує в пам'ять кількість імпульсів NП , різницю сигналів UП та керуючий сигнал для формування РДІЗ імпульсу збудження UЗ.P . Мікроконтролер сприймає сигнал на виході компаратора як різницю сигналів UП , більшу або рівну нулю, тільки коли значення ЛТІ більше, ніж NP , у двох випадках: 1. Якщо мікроконтролер отримав попередню різницю сигналів з виходу компаратора більшу 0, коли кількість імпульсів ЛТІ була менша ніж NP ; 2. Якщо мікроконтролер отримав першу різницю сигналів з виходу компаратора більшу 0, коли кількість імпульсів ЛТІ була більша ніж NP . Якщо різниця сигналів UП менша нуля, то мікроконтролер зупиняє ЛТІ після досягнення ним кількості імпульсів N П max , яка відповідає часу проходження ультразвуковим імпульсом відстані, котра в 4 рази перевищує відстані вимірюваної рівномір у повітрі при нормальних умовах і максимальній амплітуді імпульсу збудження UЗ.П . При 5 59060 цьому мікроконтролер записує у пам'ять величину керуючого сигналу для формування РДІЗ імпульсу збудження UЗ.П . Після одержання мікроконтролером 2 різниці сигналів UП , яка більша або дорівнює нулю, та запису в пам'ять кількості імпульсів NП , мікроконтролер обнуляє та включає ЛТІ, і вмикає блок визначення амплітуди сигналу (далі БВАС) 5. Після досягнення ЛТІ значення кількості імпульсів 2NП , мікроконтролер зупиняє ЛТІ й БВАС записує в пам'ять значення амплітуди фонового сигналу UФ . Після визначення відбитого сигналу від репера UP та відбитого сигналу від поверхні UП контрольованого середовища, рівнемір переходить до циклічного режиму роботи. При цьому режимі роботи вимірювальною схемою рівнеміра аналізуються значення різниць сигналів UP і UП . Якщо одержані різниці сигналів UP і UП дорівнюють або близькі до нуля, то мікроконтролер передає в блок обробки та індикації (БОІ) 1 значення лічильника NP і NП , значення амплітуди фонового сиг 6 ти. У БОІ розраховується відстань до контролюючої поверхні hП і рівень L X рідини в апараті за формулами: N hП hP П f UФ , L X H hП , NP де hП - відстань від ПКВ до поверхні контролюючого середовища, hP - задана відстань від ПКВ до репера, f UФ - функція від значення амплітуди фонового сигналу. Значення hП і L X записуються в БОІ. Якщо різниці сигналів UP чи UП менші нуля, то мікроконтролер переходить до відслідковування відбитого сигналу від репера та вводить компенсацію на величину впливу зміни параметрів газового середовища. Як видно з вищенаведеного, корисна модель, що заявляються, дозволяє отримати закладені заявником технічні результати. Проведений аналіз патентної літератури показав, що корисна модель, яка заявляється, відповідає вимозі «новизна». налу UФ та переходить до наступного циклу робо Комп’ютерна верстка Г. Паяльніков Підписне Тираж 24 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюUltrasonic device for measurement of level of media with inhomogeneous surface
Автори англійськоюYevsiukov Volodymyr Volodymyrovych, Stentsel Yosyp Ivanovych, Tomson Andrii Vladyslavovych
Назва патенту російськоюУльтразвуковое устройство для измерения уровня сред с неравномерной поверхностью
Автори російськоюЕвсюков Владимир Владимирович, Стенцель Иосиф Иванович, Томсон Андрей Владиславович
МПК / Мітки
МПК: G01F 23/28
Мітки: нерівномірною, рівня, ультразвуковий, пристрій, поверхнею, середовищ, вимірювання
Код посилання
<a href="https://ua.patents.su/3-59060-ultrazvukovijj-pristrijj-dlya-vimiryuvannya-rivnya-seredovishh-z-nerivnomirnoyu-poverkhneyu.html" target="_blank" rel="follow" title="База патентів України">Ультразвуковий пристрій для вимірювання рівня середовищ з нерівномірною поверхнею</a>
Спосіб вимірювання рівня рідких середовищ і ультразвуковий рівнемір
Номер патенту: 82594
Опубліковано: 25.04.2008
Автори: Посошко Віктор Миколайович, Уваров Анатолій Якович, Лагода Дмитро Павлович, Мєтьолкін Максим Іванович
МПК: G01F 23/28, G01S 15/00
Мітки: середовищ, вимірювання, спосіб, рівня, рідких, ультразвуковий, рівнемір
Формула / Реферат:
1. Спосіб вимірювання рівня рідких середовищ, що заснований на використанні ультразвукових імпульсів, який відрізняється тим, що блок датчика живлять постійним струмом від блока електронного вимірювального по двопровідній лінії, а інформацію від блока датчика до блока електронного вимірювального передають по цій лінії у вигляді цифрового багаторозрядного коду, який формують за допомогою амплітудної модуляції струму, споживаного блоком датчика...
Пристрій для вимірювання рівня рідинних середовищ
Номер патенту: 30475
Опубліковано: 15.11.2000
Автори: Жуков Борис Володимирович, Черепков Олексій Іванович, Спалек Юрій Михайлович, Андрієнко Юрій Олександрович, Воронін Альберт Олексійович
МПК: G01F 23/28
Мітки: рідинних, вимірювання, рівня, середовищ, пристрій
Формула / Реферат:
Пристрій для вимірювання рівня рідинних середовищ, який містить вимірювальну трубу з акустичним випромінювачем зондуючого сигналу та першим приймачем акустичних сигналів, підсилювач - формувач зондуючих сигналів, підсилювач-формувач прийнятих сигналів, схему вимірювання часового інтервалу, функційно пов'язаного з вимірюємим рівнем та індикатор, що відрізняється тим, що до нього введений другий приймач акустичних сигналів, який розташовано...
Пристрій для вимірювання рівня рідинних середовищ
Номер патенту: 321
Опубліковано: 30.04.1999
Автори: Андрієнко Юрій Олександрович, Воронін Альберт Олексійович, Зиков Віктор Володимирович, Спалек Юрій Михайлович, Черепков Олексій Іванович, Жуков Борис Володимирович
МПК: G01F 23/28
Мітки: пристрій, рідинних, вимірювання, рівня, середовищ
Формула / Реферат:
Пристрій для вимірювання рівня рідинних середовищ, що має вимірювальну трубу з акустичним випромінювачем зондуючого сигналу і приймачем акустичних сигналів, підсилювачі-формувачі зондуючого сигналу та сигналів, що приймаються, схему вимірювання часового - інтервалу, функціонально зв'язаного з рівнем, що вимірюється, та індикатор, який відрізняється тим, що вимірювальна труба вибирається з діаметром d < 1.22l, де l - довжина хвилі головної...
Ультразвуковий пристрій для вимірювання концентрації компонентів рідинних середовищ
Номер патенту: 24450
Опубліковано: 17.07.1998
Автори: Яковлев Валерій Федорович, Адон'єв Євген Олександрович, Мартиненко Іван Іванович, Гончарова Діна Миколаївна
МПК: G01N 29/14, G01N 29/02
Мітки: середовищ, концентрації, вимірювання, компонентів, ультразвуковий, рідинних, пристрій
Формула / Реферат:
Ультразвуковое устройство для измерения концентрации компонентов жидких сред, содержащее последовательно соединенные генератор зондирующих импульсов, излучающий и приемный акустические преобразователи, усилитель-формирователь, а также триггер, схему задержки, датчик температуры, отличающееся тем, что оно снабжено акустической измерительной камерой, в специальных цилиндрических стойках которой расположены излучающий и приемный акустические...
Спосіб вимірювання рівня рідинних середовищ
Номер патенту: 30742
Опубліковано: 15.12.2000
Автори: Жуков Борис Володимирович, Воронін Альберт Олексійович, Черепков Олексій Іванович, Андрієнко Юрій Олександрович, Спалек Юрій Михайлович
МПК: G01F 23/28
Мітки: рідинних, спосіб, середовищ, вимірювання, рівня
Формула / Реферат:
Спосіб вимірювання рівня рідинних середовищ, що включає випромінювання перпендикулярно поверхні рідини зондуючого сигналу, прийняття відбитого від межі розподілу середовищ сигналу та вимірювання часового інтервалу, що функційно пов'язаний з вимірюваним рівнем, що відрізняється тим, що зондуючий та відбитий сигнали каналізують у хвилеведучому тракті у вигляді поздовжніх акустичних хвиль, приймають ці сигнали послідовно у двох (першій та...
Попередній патент: Суміш макромолекул дезоксирибонуклеїнової кислоти тваринного походження як носій для терапевтичних агентів
Випадковий патент: Вітрогідроенергетична установка