Пристрій для вимірювання рівня рідинних середовищ
Номер патенту: 30475
Опубліковано: 15.11.2000
Автори: Черепков Олексій Іванович, Спалек Юрій Михайлович, Воронін Альберт Олексійович, Андрієнко Юрій Олександрович, Жуков Борис Володимирович
Формула / Реферат
Пристрій для вимірювання рівня рідинних середовищ, який містить вимірювальну трубу з акустичним випромінювачем зондуючого сигналу та першим приймачем акустичних сигналів, підсилювач - формувач зондуючих сигналів, підсилювач-формувач прийнятих сигналів, схему вимірювання часового інтервалу, функційно пов'язаного з вимірюємим рівнем та індикатор, що відрізняється тим, що до нього введений другий приймач акустичних сигналів, який розташовано нижче першого приймача на фіксованій відстані від нього та вище максимально припустимого рівня рідини для даного резервуару, при цьому обидва приймача встановлені нижче рівня випромінювача на зовнішній стінці вимірювальной труби та пов'язані входами з її порожниною узгоджуючими трансформаторами, а виходами крізь підсилювач-формувач прийнятих сигналів підключені до сигнального входу схеми вимірювання часового інтервалу, функціонально пов'язаного з рівнем, що вимірюють, виконаний на мікпроцесорі, що реалізує задану програму керування процесом вимірювання та обчислення усереденного значення рівня рідини lр відповідно до призначення та початковими даними за формулою
![]() ,
,
де L - відстань від другого (нижнього) приймача до дна резервуару; l0 - фіксована відстань між обома приймачами; N - кількість останніх відліків, по яким провадиться усереднення результатів вимірювань рівня; txi - часовий інтервал між зондуючим та відбитим сигналами, прийнятими другим приймачем у iтому вимірюванні; t0i - часовий інтервал між прийняттям зондуючого сигналу першим та другим приймачами у iтому вимірюванні; t'0i - часовий інтервал між прийняттям відбитого сигналу другим та першим приймачами у iтому вимірюванні, - при цьому перший вихід мікропроцесору, синхронізуючий, підключено до керуючого входу підсилювача - формувача зондуючих відеосигналів, другий вихід, інформаційний, з'єднано з входом індикатору вимірюємого рівня, а третій вихід призначений для зв'язку з зовнішніми пристроями, наприклад, ЕОМ.__________________________________
Текст
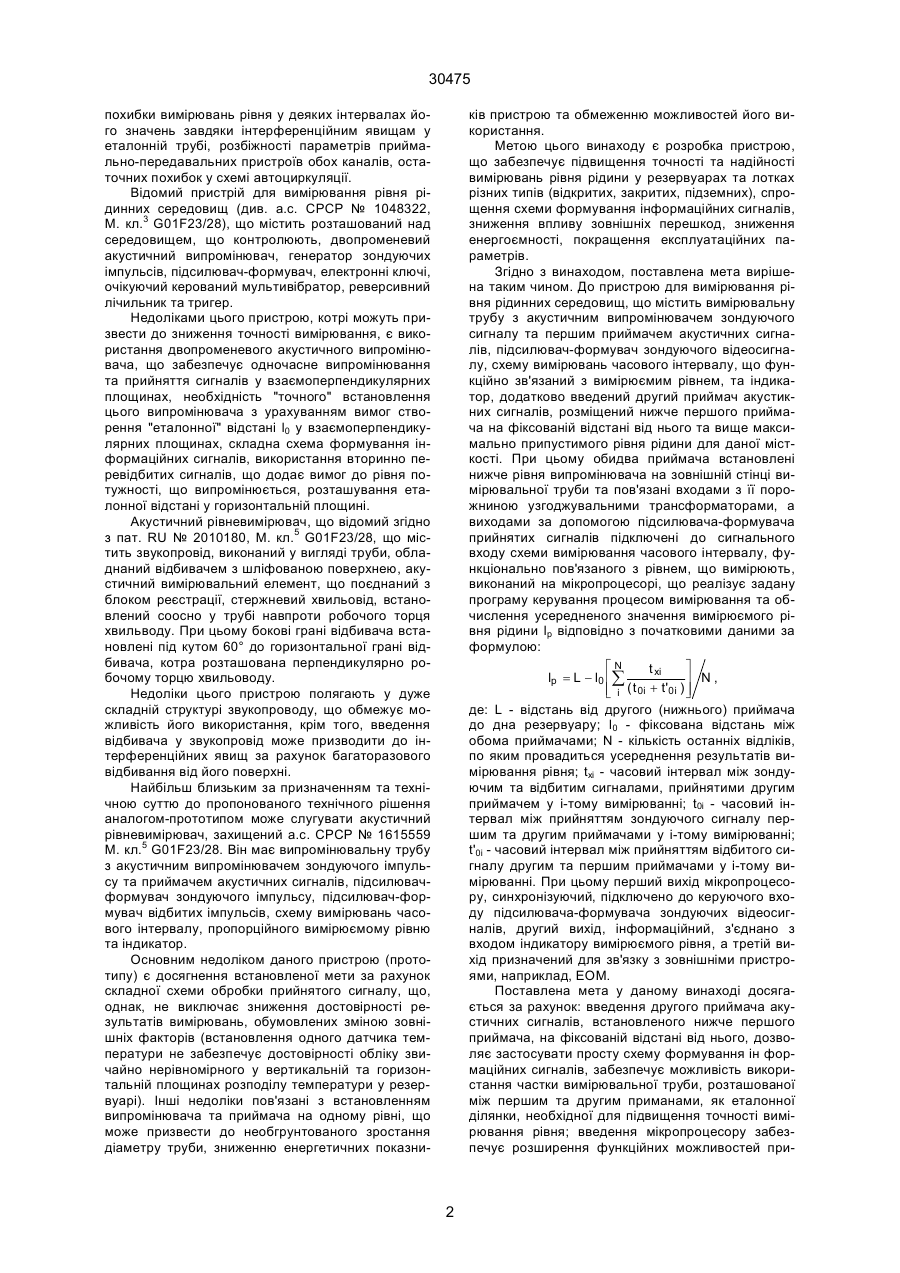
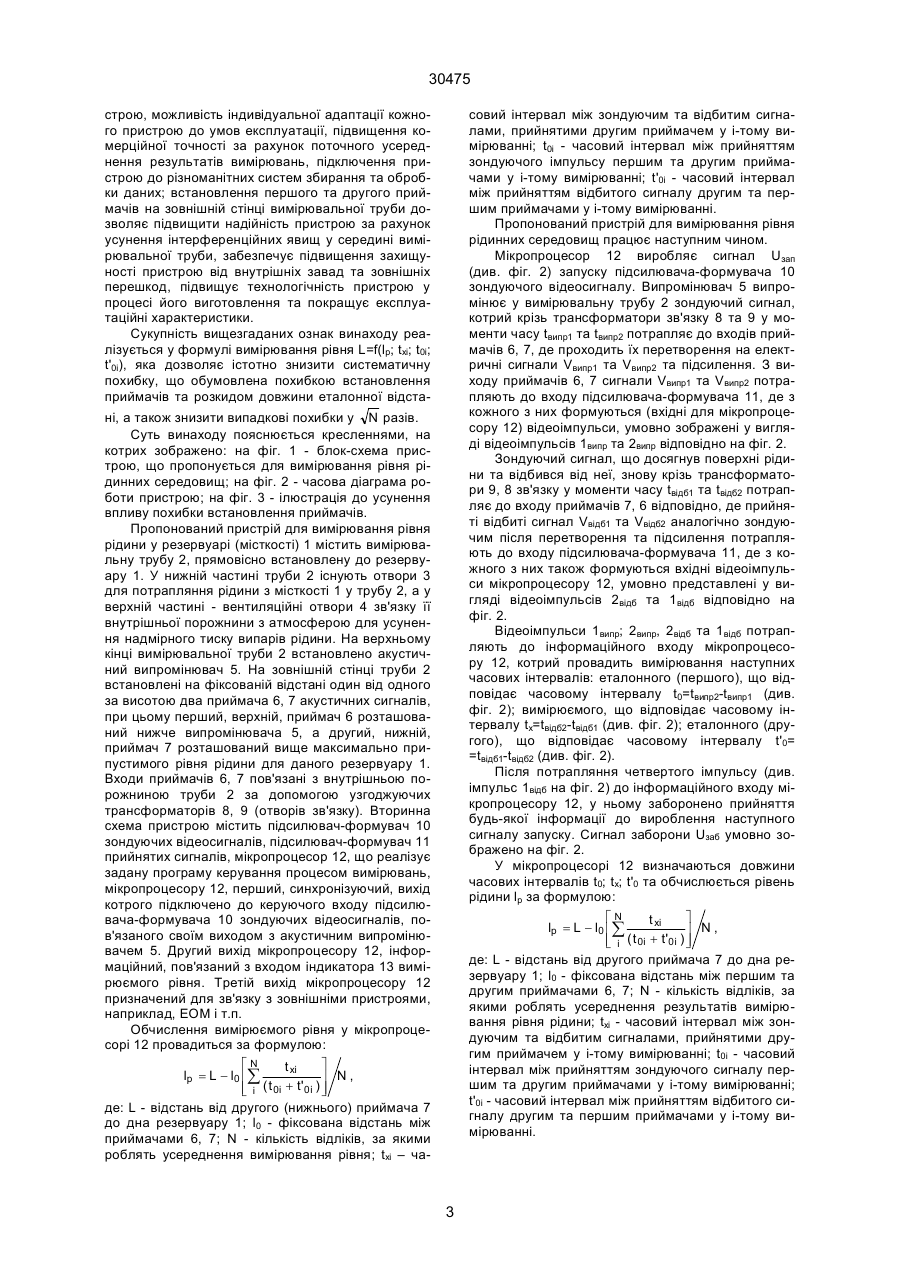
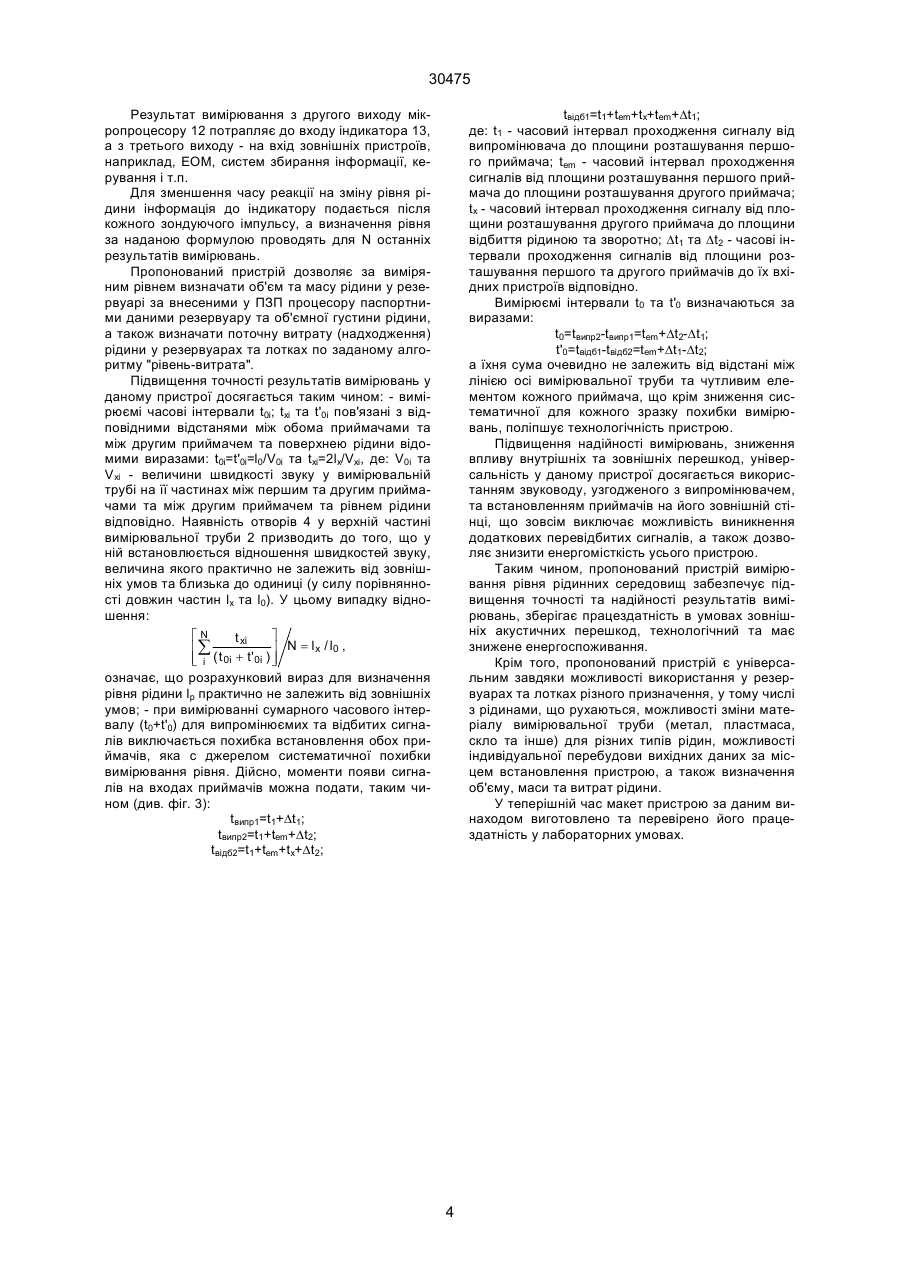
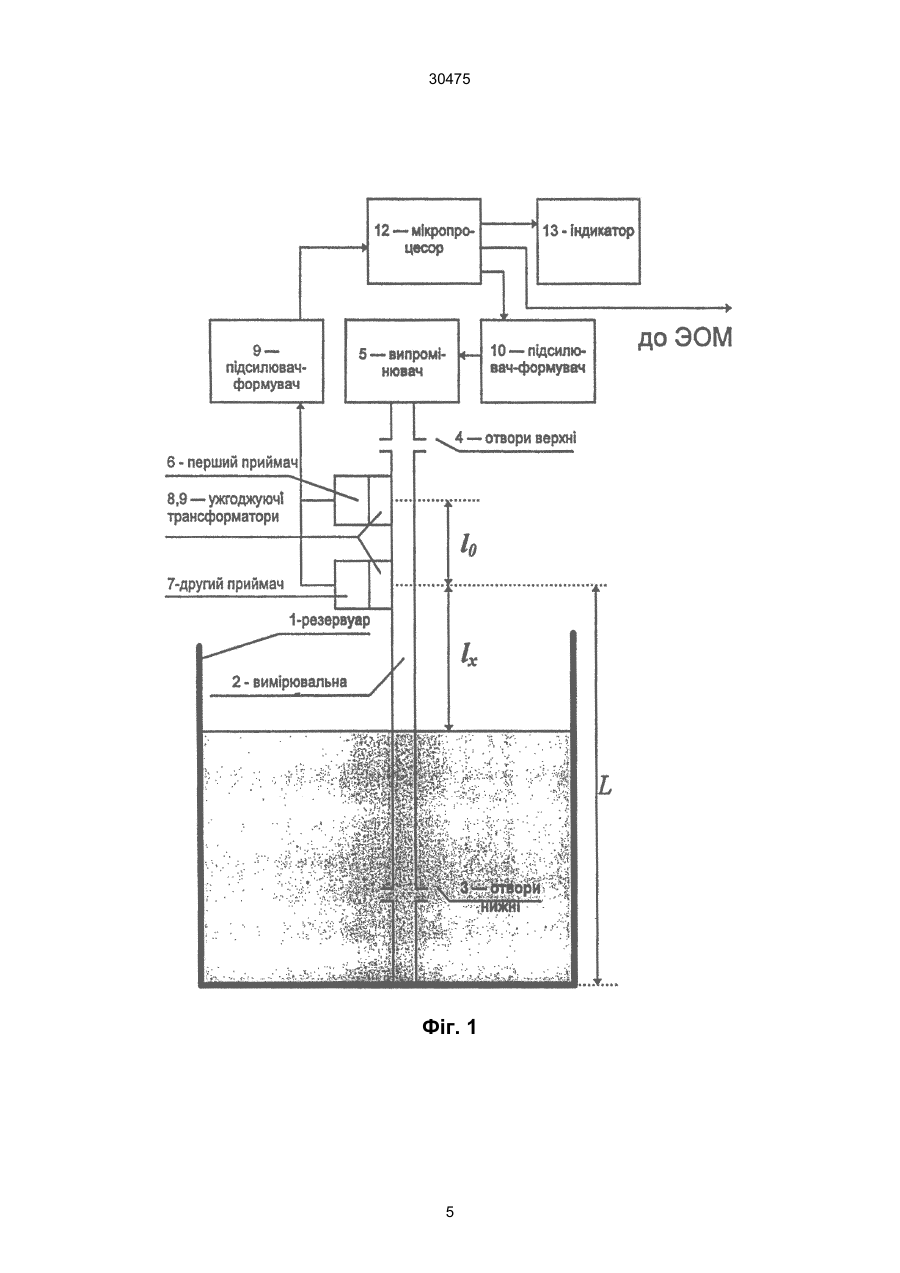
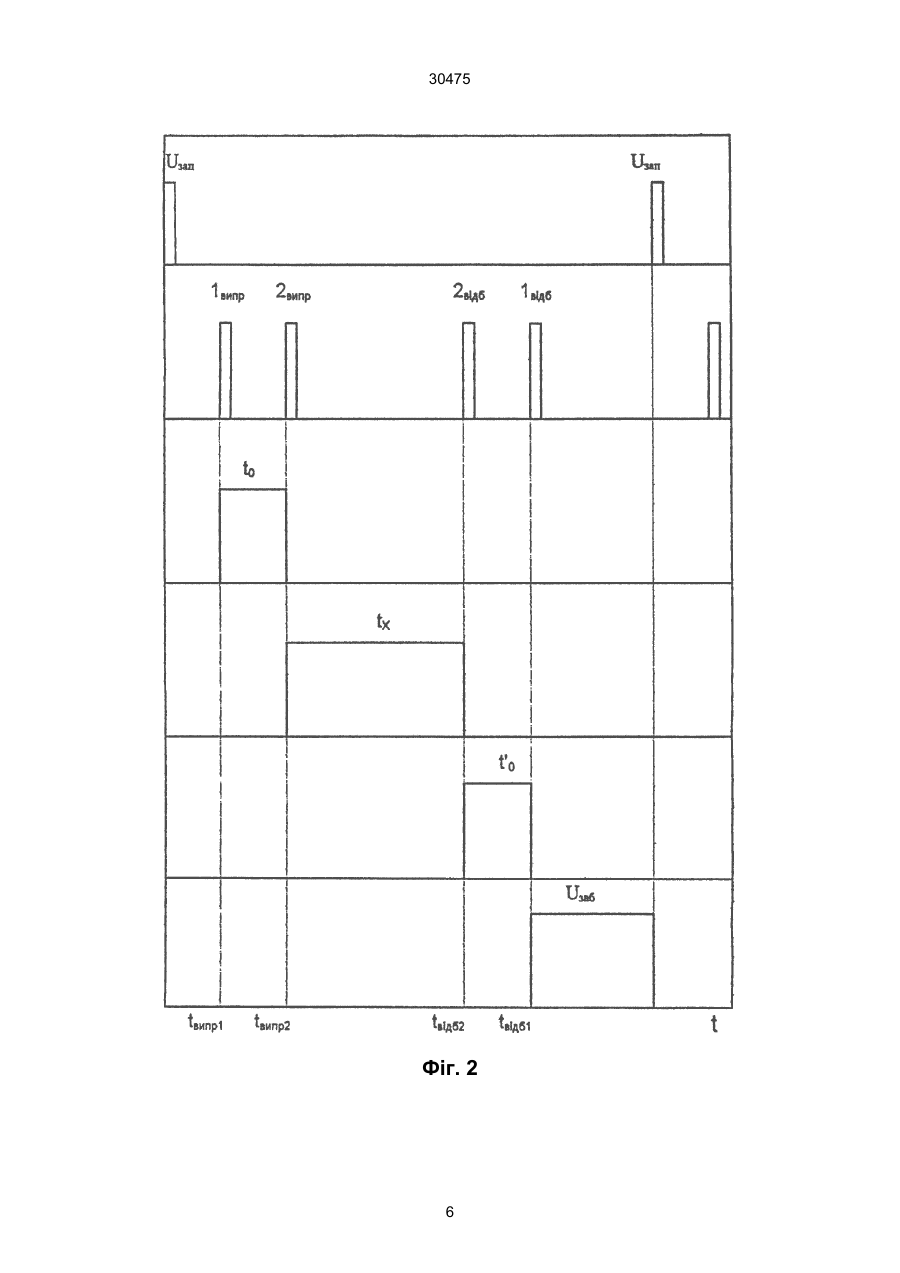
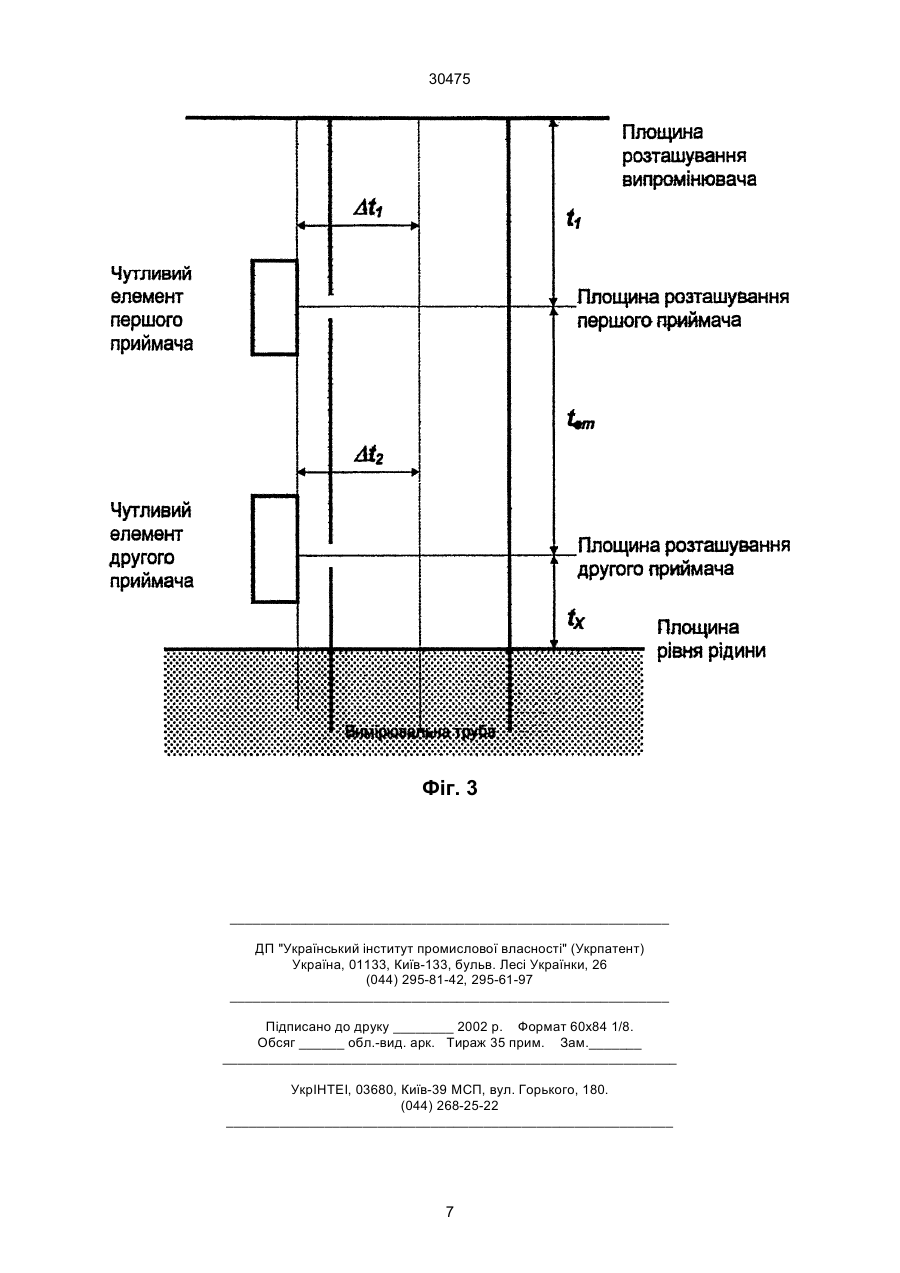
Пристрій для вимірювання рівня рідинних середовищ, який містить вимірювальну трубу з акустичним випромінювачем зондуючого сигналу та першим приймачем акустичних сигналів, підсилювач - формувач зондуючих сигналів, підсилювачформувач прийнятих сигналів, схему вимірювання часового інтервалу, функційно пов'язаного з вимірюємим рівнем та індикатор, що відрізняється тим, що до нього введений другий приймач акустичних сигналів, який розташовано нижче першого приймача на фіксованій відстані від нього та вище максимально припустимого рівня рідини для даного резервуару, при цьому обидва приймача встановлені нижче рівня випромінювача на зовнішній стінці вимірювальной труби та пов'язані входами з її порожниною узгоджуючими трансформаторами, A (54) ПРИСТРІЙ ДЛЯ ВИМІРЮВАННЯ РІВНЯ РІДИННИХ СЕРЕДОВИЩ 30475 похибки вимірювань рівня у деяких інтервалах його значень завдяки інтерференційним явищам у еталонній трубі, розбіжності параметрів приймально-передавальних пристроїв обох каналів, остаточних похибок у схемі автоциркуляції. Відомий пристрій для вимірювання рівня рідинних середовищ (див. а.с. СРСР № 1048322, М. кл.3 G01F23/28), що містить розташований над середовищем, що контролюють, двопроменевий акустичний випромінювач, генератор зондуючих імпульсів, підсилювач-формувач, електронні ключі, очікуючий керований мультивібратор, реверсивний лічильник та тригер. Недоліками цього пристрою, котрі можуть призвести до зниження точності вимірювання, є використання двопроменевого акустичного випромінювача, що забезпечує одночасне випромінювання та прийняття сигналів у взаємоперпендикулярних площинах, необхідність "точного" встановлення цього випромінювача з урахуванням вимог створення "еталонної" відстані l0 у взаємоперпендикулярних площинах, складна схема формування інформаційних сигналів, використання вторинно перевідбитих сигналів, що додає вимог до рівня потужності, що випромінюється, розташування еталонної відстані у горизонтальній площині. Акустичний рівневимірювач, що відомий згідно з пат. RU № 2010180, M. кл.5 G01F23/28, що містить звукопровід, виконаний у вигляді труби, обладнаний відбивачем з шліфованою поверхнею, акустичний вимірювальний елемент, що поєднаний з блоком реєстрації, стержневий хвильовід, встановлений соосно у трубі навпроти робочого торця хвильводу. При цьому бокові грані відбивача встановлені під кутом 60° до горизонтальної грані відбивача, котра розташована перпендикулярно робочому торцю хвильоводу. Недоліки цього пристрою полягають у дуже складній структурі звукопроводу, що обмежує можливість його використання, крім того, введення відбивача у звукопровід може призводити до інтерференційних явищ за рахунок багаторазового відбивання від його поверхні. Найбільш близьким за призначенням та технічною суттю до пропонованого технічного рішення аналогом-прототипом може слугувати акустичний рівневимірювач, захищений а.с. СРСР № 1615559 М. кл.5 G01F23/28. Він має випромінювальну трубу з акустичним випромінювачем зондуючого імпульсу та приймачем акустичних сигналів, підсилювачформувач зондуючого імпульсу, підсилювач-формувач відбитих імпульсів, схему вимірювань часового інтервалу, пропорційного вимірюємому рівню та індикатор. Основним недоліком даного пристрою (прототипу) є досягнення встановленої мети за рахунок складної схеми обробки прийнятого сигналу, що, однак, не виключає зниження достовірності результатів вимірювань, обумовлених зміною зовнішніх факторів (встановлення одного датчика температури не забезпечує достовірності обліку звичайно нерівномірного у вертикальній та горизонтальній площинах розподілу температури у резервуарі). Інші недоліки пов'язані з встановленням випромінювача та приймача на одному рівні, що може призвести до необгрунтованого зростання діаметру труби, зниженню енергетичних показни ків пристрою та обмеженню можливостей його використання. Метою цього винаходу є розробка пристрою, що забезпечує підвищення точності та надійності вимірювань рівня рідини у резервуарах та лотках різних типів (відкритих, закритих, підземних), спрощення схеми формування інформаційних сигналів, зниження впливу зовнішніх перешкод, зниження енергоємності, покращення експлуатаційних параметрів. Згідно з винаходом, поставлена мета вирішена таким чином. До пристрою для вимірювання рівня рідинних середовищ, що містить вимірювальну трубу з акустичним випромінювачем зондуючого сигналу та першим приймачем акустичних сигналів, підсилювач-формувач зондуючого відеосигналу, схему вимірювань часового інтервалу, що функційно зв'язаний з вимірюємим рівнем, та індикатор, додатково введений другий приймач акустикних сигналів, розміщений нижче першого приймача на фіксованій відстані від нього та вище максимально припустимого рівня рідини для даної місткості. При цьому обидва приймача встановлені нижче рівня випромінювача на зовнішній стінці вимірювальної труби та пов'язані входами з її порожниною узгоджувальними трансформаторами, а виходами за допомогою підсилювача-формувача прийнятих сигналів підключені до сигнального входу схеми вимірювання часового інтервалу, функціонально пов'язаного з рівнем, що вимірюють, виконаний на мікропроцесорі, що реалізує задану програму керування процесом вимірювання та обчислення усередненого значення вимірюємого рівня рідини lр відповідно з початковими даними за формулою: éN ù t xi lp = L - l0 êå ú N, ê i ( t 0i + t'0i ) ú ë û де: L - відстань від другого (нижнього) приймача до дна резервуару; l0 - фіксована відстань між обома приймачами; N - кількість останніх відліків, по яким провадиться усереднення результатів вимірювання рівня; txi - часовий інтервал між зондуючим та відбитим сигналами, прийнятими другим приймачем у і-тому вимірюванні; t0i - часовий інтервал між прийняттям зондуючого сигналу першим та другим приймачами у і-тому вимірюванні; t'0i - часовий інтервал між прийняттям відбитого сигналу другим та першим приймачами у і-тому вимірюванні. При цьому перший вихід мікропроцесору, синхронізуючий, підключено до керуючого входу підсилювача-формувача зондуючих відеосигналів, другий вихід, інформаційний, з'єднано з входом індикатору вимірюємого рівня, а третій вихід призначений для зв'язку з зовнішніми пристроями, наприклад, ЕОМ. Поставлена мета у даному винаході досягається за рахунок: введення другого приймача акустичних сигналів, встановленого нижче першого приймача, на фіксованій відстані від нього, дозволяє застосувати просту схему формування ін формаційних сигналів, забезпечує можливість використання частки вимірювальної труби, розташованої між першим та другим приманами, як еталонної ділянки, необхідної для підвищення точності вимірювання рівня; введення мікропроцесору забезпечує розширення функційних можливостей при 2 30475 строю, можливість індивідуальної адаптації кожного пристрою до умов експлуатації, підвищення комерційної точності за рахунок поточного усереднення результатів вимірювань, підключення пристрою до різноманітних систем збирання та обробки даних; встановлення першого та другого приймачів на зовнішній стінці вимірювальної труби дозволяє підвищити надійність пристрою за рахунок усунення інтерференційних явищ у середині вимірювальної труби, забезпечує підвищення захищуності пристрою від внутрішніх завад та зовнішніх перешкод, підвищує технологічність пристрою у процесі його виготовлення та покращує експлуатаційні характеристики. Сукупність вищезгаданих ознак винаходу реалізується у формулі вимірювання рівня L=f(lр; txi; t0i; t'0i), яка дозволяє істотно знизити систематичну похибку, що обумовлена похибкою встановлення приймачів та розкидом довжини еталонної відста совий інтервал між зондуючим та відбитим сигналами, прийнятими другим приймачем у і-тому вимірюванні; t0i - часовий інтервал між прийняттям зондуючого імпульсу першим та другим приймачами у і-тому вимірюванні; t'0i - часовий інтервал між прийняттям відбитого сигналу другим та першим приймачами у і-тому вимірюванні. Пропонований пристрій для вимірювання рівня рідинних середовищ працює наступним чином. Мікропроцесор 12 виробляє сигнал Uзап (див. фіг. 2) запуску підсилювача-формувача 10 зондуючого відеосигналу. Випромінювач 5 випромінює у вимірювальну трубу 2 зондуючий сигнал, котрий крізь трансформатори зв'язку 8 та 9 у моменти часу tвипр1 та tвипр2 потрапляє до входів приймачів 6, 7, де проходить їх перетворення на електричні сигнали Vвипр1 та Vвипр2 та підсилення. З виходу приймачів 6, 7 сигнали Vвипр1 та Vвипр2 потрапляють до входу підсилювача-формувача 11, де з кожного з них формуються (вхідні для мікропроцесору 12) відеоімпульси, умовно зображені у вигляді відеоімпульсів 1випр та 2випр відповідно на фіг. 2. Зондуючий сигнал, що досягнув поверхні рідини та відбився від неї, знову крізь трансформатори 9, 8 зв'язку у моменти часу tвідб1 та tвідб2 потрапляє до входу приймачів 7, 6 відповідно, де прийняті відбиті сигнал Vвідб1 та Vвідб2 аналогічно зондуючим після перетворення та підсилення потрапляють до входу підсилювача-формувача 11, де з кожного з них також формуються вхідні відеоімпульси мікропроцесору 12, умовно представлені у вигляді відеоімпульсів 2відб та 1відб відповідно на фіг. 2. Відеоімпульси 1випр; 2випр, 2відб та 1відб потрапляють до інформаційного входу мікропроцесору 12, котрий провадить вимірювання наступних часових інтервалів: еталонного (першого), що відповідає часовому інтервалу t0=tвипр2-tвипр1 (див. фіг. 2); вимірюємого, що відповідає часовому інтервалу tx=tвідб2-tвідб1 (див. фіг. 2); еталонного (другого), що відповідає часовому інтервалу t'0= =tвідб1-tвідб2 (див. фіг. 2). Після потрапляння четвертого імпульсу (див. імпульс 1відб на фіг. 2) до інформаційного входу мікропроцесору 12, у ньому заборонено прийняття будь-якої інформації до вироблення наступного сигналу запуску. Сигнал заборони Uзаб умовно зображено на фіг. 2. У мікропроцесорі 12 визначаються довжини часових інтервалів t0; tx; t'0 та обчислюється рівень рідини lр за формулою: éN ù t xi lp = L - l0 êå ú N, ( t 0i + t'0i ) ú ê i ë û де: L - відстань від другого приймача 7 до дна резервуару 1; l0 - фіксована відстань між першим та другим приймачами 6, 7; N - кількість відліків, за якими роблять усереднення результатів вимірювання рівня рідини; txi - часовий інтервал між зондуючим та відбитим сигналами, прийнятими другим приймачем у і-тому вимірюванні; t0i - часовий інтервал між прийняттям зондуючого сигналу першим та другим приймачами у і-тому вимірюванні; t'0i - часовий інтервал між прийняттям відбитого сигналу другим та першим приймачами у і-тому вимірюванні. ні, а також знизити випадкові похибки у N разів. Суть винаходу пояснюється кресленнями, на котрих зображено: на фіг. 1 - блок-схема пристрою, що пропонується для вимірювання рівня рідинних середовищ; на фіг. 2 - часова діаграма роботи пристрою; на фіг. 3 - ілюстрація до усунення впливу похибки встановлення приймачів. Пропонований пристрій для вимірювання рівня рідини у резервуарі (місткості) 1 містить вимірювальну трубу 2, прямовісно встановлену до резервуару 1. У нижній частині труби 2 існують отвори 3 для потрапляння рідини з місткості 1 у трубу 2, а у верхній частині - вентиляційні отвори 4 зв'язку її внутрішньої порожнини з атмосферою для усунення надмірного тиску випарів рідини. На верхньому кінці вимірювальної труби 2 встановлено акустичний випромінювач 5. На зовнішній стінці труби 2 встановлені на фіксованій відстані один від одного за висотою два приймача 6, 7 акустичних сигналів, при цьому перший, верхній, приймач 6 розташований нижче випромінювача 5, а другий, нижній, приймач 7 розташований вище максимально припустимого рівня рідини для даного резервуару 1. Входи приймачів 6, 7 пов'язані з внутрішньою порожниною труби 2 за допомогою узгоджуючих трансформаторів 8, 9 (отворів зв'язку). Вторинна схема пристрою містить підсилювач-формувач 10 зондуючих відеосигналів, підсилювач-формувач 11 прийнятих сигналів, мікропроцесор 12, що реалізує задану програму керування процесом вимірювань, мікропроцесору 12, перший, синхронізуючий, вихід котрого підключено до керуючого входу підсилювача-формувача 10 зондуючих відеосигналів, пов'язаного своїм виходом з акустичним випромінювачем 5. Другий вихід мікропроцесору 12, інформаційний, пов'язаний з входом індикатора 13 вимірюємого рівня. Третій вихід мікропроцесору 12 призначений для зв'язку з зовнішніми пристроями, наприклад, ЕОМ і т.п. Обчислення вимірюємого рівня у мікропроцесорі 12 провадиться за формулою: éN ù t xi lp = L - l0 êå ú N, ê i ( t 0i + t'0i ) ú ë û де: L - відстань від другого (нижнього) приймача 7 до дна резервуару 1; l0 - фіксована відстань між приймачами 6, 7; N - кількість відліків, за якими роблять усереднення вимірювання рівня; txi – ча 3 30475 Результат вимірювання з другого виходу мікропроцесору 12 потрапляє до входу індикатора 13, а з третього виходу - на вхід зовнішніх пристроїв, наприклад, ЕОМ, систем збирання інформації, керування і т.п. Для зменшення часу реакції на зміну рівня рідини інформація до індикатору подається після кожного зондуючого імпульсу, а визначення рівня за наданою формулою проводять для N останніх результатів вимірювань. Пропонований пристрій дозволяє за виміряним рівнем визначати об'єм та масу рідини у резервуарі за внесеними у ПЗП процесору паспортними даними резервуару та об'ємної густини рідини, а також визначати поточну витрату (надходження) рідини у резервуарах та лотках по заданому алгоритму "рівень-витрата". Підвищення точності результатів вимірювань у даному пристрої досягається таким чином: - вимірюємі часові інтервали t0i; txi та t'0i пов'язані з відповідними відстанями між обома приймачами та між другим приймачем та поверхнею рідини відомими виразами: t0i=t'0i=l0/V0і та txi=2lx/Vxi, де: V0і та Vxі - величини швидкості звуку у вимірювальній трубі на її частинах між першим та другим приймачами та між другим приймачем та рівнем рідини відповідно. Наявність отворів 4 у верхній частині вимірювальної труби 2 призводить до того, що у ній встановлюється відношення швидкостей звуку, величина якого практично не залежить від зовнішніх умов та близька до одиниці (у силу порівнянності довжин частин lх та l0). У цьому випадку відношення: éN ù t xi êå ú N = l x / l0 , ê i ( t 0i + t'0i ) ú ë û означає, що розрахунковий вираз для визначення рівня рідини lр практично не залежить від зовнішніх умов; - при вимірюванні сумарного часового інтервалу (t0+t'0) для випромінюємих та відбитих сигналів виключається похибка встановлення обох приймачів, яка с джерелом систематичної похибки вимірювання рівня. Дійсно, моменти появи сигналів на входах приймачів можна подати, таким чином (див. фіг. 3): tвипр1=t1+∆t1; tвипр2=t1+tem +∆t2; tвідб2=t1+tem +tx+∆t2; tвідб1=t1+tem +tx+tem +∆t1; де: t1 - часовий інтервал проходження сигналу від випромінювача до площини розташування першого приймача; tеm - часовий інтервал проходження сигналів від площини розташування першого приймача до площини розташування другого приймача; tx - часовий інтервал проходження сигналу від площини розташування другого приймача до площини відбиття рідиною та зворотно; ∆t1 та ∆t2 - часові інтервали проходження сигналів від площини розташування першого та другого приймачів до їх вхідних пристроїв відповідно. Вимірюємі інтервали t0 та t'0 визначаються за виразами: t0=tвипр2-tвипр1=tem +∆t2-∆t1; t'0=tвідб1-tвідб2=tem +∆t1-∆t2; а їхня сума очевидно не залежить від відстані між лінією осі вимірювальної труби та чутливим елементом кожного приймача, що крім зниження систематичної для кожного зразку похибки вимірювань, поліпшує технологічність пристрою. Підвищення надійності вимірювань, зниження впливу внутрішніх та зовнішніх перешкод, універсальність у даному пристрої досягається використанням звуководу, узгодженого з випромінювачем, та встановленням приймачів на його зовнішній стінці, що зовсім виключає можливість виникнення додаткових перевідбитих сигналів, а також дозволяє знизити енергомісткість усього пристрою. Таким чином, пропонований пристрій вимірювання рівня рідинних середовищ забезпечує підвищення точності та надійності результатів вимірювань, зберігає працездатність в умовах зовнішніх акустичних перешкод, технологічний та має знижене енергоспоживання. Крім того, пропонований пристрій є універсальним завдяки можливості використання у резервуарах та лотках різного призначення, у тому числі з рідинами, що рухаються, можливості зміни матеріалу вимірювальної труби (метал, пластмаса, скло та інше) для різних типів рідин, можливості індивідуальної перебудови вихідних даних за місцем встановлення пристрою, а також визначення об'єму, маси та витрат рідини. У теперішній час макет пристрою за даним винаходом виготовлено та перевірено його працездатність у лабораторних умовах. 4 30475 Фіг. 1 5 30475 Фіг. 2 6 30475 Фіг. 3 __________________________________________________________ ДП "Український інститут промислової власності" (Укрпатент) Україна, 01133, Київ-133, бульв. Лесі Українки, 26 (044) 295-81-42, 295-61-97 __________________________________________________________ Підписано до друку ________ 2002 р. Формат 60х84 1/8. Обсяг ______ обл.-вид. арк. Тираж 35 прим. Зам._______ ____________________________________________________________ УкрІНТЕІ, 03680, Київ-39 МСП, вул. Горького, 180. (044) 268-25-22 ___________________________________________________________ 7
ДивитисяДодаткова інформація
Назва патенту англійськоюAppliance for measurement of level of liquid media
Автори англійськоюZhukov Borys Volodymyrovych, Voronin Albert Oleksiiovych, Andrienko Yurii Oleksandrovych, Cherepkov Oleksii Ivanovych, Spalek Yurii Mykhailovych
Назва патенту російськоюУстройство для измерения уровня жидких сред
Автори російськоюЖуков Борис Владимирович, Воронин Альберт Алексеевич, Андриенко Юрий Александрович, Черепков Алексей Иванович, Спалек Юрий Михайлович
МПК / Мітки
МПК: G01F 23/28
Мітки: середовищ, рідинних, рівня, пристрій, вимірювання
Код посилання
<a href="https://ua.patents.su/7-30475-pristrijj-dlya-vimiryuvannya-rivnya-ridinnikh-seredovishh.html" target="_blank" rel="follow" title="База патентів України">Пристрій для вимірювання рівня рідинних середовищ</a>
Пристрій для вимірювання рівня рідинних середовищ
Номер патенту: 321
Опубліковано: 30.04.1999
Автори: Зиков Віктор Володимирович, Жуков Борис Володимирович, Черепков Олексій Іванович, Воронін Альберт Олексійович, Спалек Юрій Михайлович, Андрієнко Юрій Олександрович
МПК: G01F 23/28
Мітки: вимірювання, рідинних, пристрій, рівня, середовищ
Формула / Реферат:
Пристрій для вимірювання рівня рідинних середовищ, що має вимірювальну трубу з акустичним випромінювачем зондуючого сигналу і приймачем акустичних сигналів, підсилювачі-формувачі зондуючого сигналу та сигналів, що приймаються, схему вимірювання часового - інтервалу, функціонально зв'язаного з рівнем, що вимірюється, та індикатор, який відрізняється тим, що вимірювальна труба вибирається з діаметром d < 1.22l, де l - довжина хвилі головної...
Ультразвуковий пристрій для вимірювання концентрації компонентів рідинних середовищ
Номер патенту: 24450
Опубліковано: 17.07.1998
Автори: Яковлев Валерій Федорович, Мартиненко Іван Іванович, Гончарова Діна Миколаївна, Адон'єв Євген Олександрович
МПК: G01N 29/02, G01N 29/14
Мітки: рідинних, концентрації, вимірювання, ультразвуковий, середовищ, пристрій, компонентів
Формула / Реферат:
Ультразвуковое устройство для измерения концентрации компонентов жидких сред, содержащее последовательно соединенные генератор зондирующих импульсов, излучающий и приемный акустические преобразователи, усилитель-формирователь, а также триггер, схему задержки, датчик температуры, отличающееся тем, что оно снабжено акустической измерительной камерой, в специальных цилиндрических стойках которой расположены излучающий и приемный акустические...
Пристрій для регулювання рівня розділу двох середовищ
Номер патенту: 18424
Опубліковано: 25.12.1997
Автори: Занічковська Любов Володимирівна, Обельовська Квітослава Михайлівна, Кочан Володимир Володимирович
МПК: G05D 9/00
Мітки: середовищ, рівня, двох, розділу, пристрій, регулювання
Формула / Реферат:
Устройство для регулирования уровня раздела двух сред, содержащее датчики нижнего и верхнего уровня первой жидкости, соединенные выходами с входами соответственно первого и второго измерительных преобразователей уровня, датчик нижнего уровня второй жидкости, соединенный выходом с входом третьего измерительного преобразователя уровня, а также два клапана слива, установленные на соответствующих трубопроводах слива первой и второй жидкостей, два...
Пристрій для вимірювання рівня рідини в каліброваних посудинах
Номер патенту: 639
Опубліковано: 16.10.2000
Автори: Таушан Євген Миколайович, Шувалов Валерій Федорович, Глінін Геннадій Павлович, Яніковський Анатолій Йосипович
МПК: G01F 23/00
Мітки: рівня, рідини, вимірювання, пристрій, каліброваних, посудинах
Формула / Реферат:
1. Пристрій для вимірювання рівня рідини в каліброваних посудинах, який складається із покажчика рівня наливу, що закріплений на шийці посудини, двох опор, які виконані у вигляді бонок, що діаметрально розташовані відносно шийки та жорстко закріплені на корпусі посудини, і метроштока, що містить коромисло і перпендикулярно закріплену з ним вимірювальну лінійку, який відрізняється тим, що кожна бонка додатково забезпечена буртиком, який...
Пристрій для вимірювання рівня шляхом вимірювання тиску в п’єзотрубці
Номер патенту: 22149
Опубліковано: 30.04.1998
Автор: Сербін Юрій Федорович
МПК: G01F 23/14
Мітки: п'єзотрубці, тиску, шляхом, рівня, вимірювання, пристрій
Формула / Реферат:
Устройство для измерения уровня путем измерения давления в пьезотрубке, включающее манометр, вход которого соединен основным импульсным трубопроводом со штуцером отбора основного импульса давления, пьезотрубку и штуцер для подачи воздуха в пьезотрубку, соединенный с ограничителем расхода воздуха, выполненным с возможностью соединения с линией подачи воздуха, отличающееся тем, что штуцер для подачи воздуха неразъемно соединен с...
Попередній патент: Спосіб обробки полімерного матеріалу
Наступний патент: Спосіб управління гідротранспортною установкою та пристрій для його здійснення
Випадковий патент: Шатун двигуна внутрішнього згоряння або компресора