Мікромеханічний гіроскоп
Номер патенту: 61843
Опубліковано: 25.07.2011
Автори: Бондар Павло Михайлович, Житнік Тетяна Сергіївна, Лошкарьова Катерина Валеріївна
Формула / Реферат
Мікромеханічний гіроскоп, що містить два однакові чутливі елементи (ЧЕ), генератор, пристрій віднімання сигналів вторинних коливань, який відрізняється тим, що додатково містить пристрій додавання вторинних коливань.
Текст
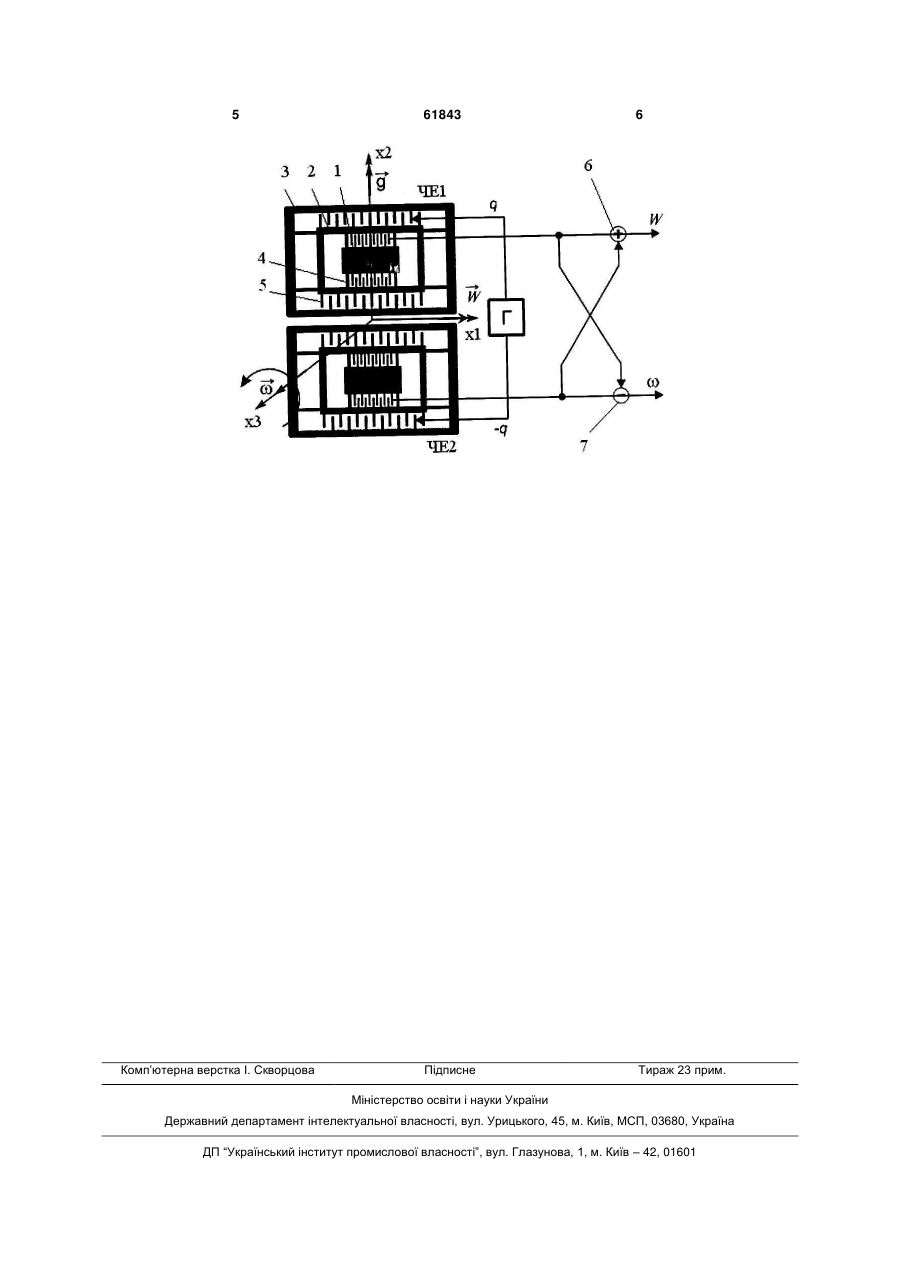
Мікромеханічний гіроскоп, що містить два однакові чутливі елементи (ЧЕ), генератор, пристрій віднімання сигналів вторинних коливань, який відрізняється тим, що додатково містить пристрій додавання вторинних коливань. (19) (21) u201102536 (22) 03.03.2011 (24) 25.07.2011 (46) 25.07.2011, Бюл.№ 14, 2011 р. (72) БОНДАР ПАВЛО МИХАЙЛОВИЧ, ЛОШКАРЬОВА КАТЕРИНА ВАЛЕРІЇВНА, ЖИТНІК ТЕТЯНА СЕРГІЇВНА 3 де h1 і h2 - коефіцієнти демпфування, відповідні руху чутливого елемента в напрямку координат х1 і х2, k 2 - парціальна частота інерційної маси, 2 2 - парціальна частота рамки з інерційною маk 1 сою, - кутова швидкість, d - безрозмірні коефі 61843 4 цієнти інерційної асиметрії, W - лінійне прискорення, q(p) - узагальнене прискорення. Система рівнянь руху чутливих елементів розпадається на дві групи незалежних рівнянь. Оскільки нас цікавлять тільки вторинні коливання знайдемо розв'язок тільки першого та третього рівняння. Розв'язок першого рівняння відноситься до ЧЕ1: 2 2 2 p 2h2p k 21 W p 2pqp x1p . (1.2) 2 k 2 2 p2 2h p k 2 2 42p2 p 2h1p 2 2 1 Розв'язок третього рівняння відноситься до ЧЕ2: 2 2 2 p 2h2p k 21 W p 2pqp x'1 p . (1.3) 2 k 2 2 p2 2h p k 2 2 42p2 p 2h1p 2 2 1 Диференціальний вихід дозволяє виділити сигнали про кутову швидкість і про переносне лінійне прискорення. При цьому переносна кутова швидкість вимірюється шляхом вирахування вихідних сигналів вимірювачів яке здійснюється за допомогою пристрою віднімання вторинних коливань 7, а переносне лінійне прискорення - шляхом складання цих сигналів, за допомогою пристрою додавання вторинних коливань 6. Таким чином якщо додати вирази (1.2) і (1.3) одержимо: 2p2 2h2p k 2 2 W p 2 x1p x'1 (p) . 2 k 2 2 p2 2h p k 2 2 42p2 p 2h1p 2 2 1 Якщо частота змінювання прискорення значно менша частоти первинних коливань, останній вираз можна спростити: 2 k 2 2 W 2 2W x1p x'1 (p) . k 2 2 k 2 2 k 2 2 1 2 1 Отриманий вираз підтверджує, що результатом складання вхідних сигналів вимірювачів є інформація про лінійне прискорення. Одержання інформації не лише про кутову швидкість а й про лінійне прискорення розширює функціональні можливості приладу. Додаткова інформація про лінійне прискорення може бути використана, наприклад, для забезпечення своєчасного включення бокових подушок безпеки в автомобілі. 5 Комп’ютерна верстка І. Скворцова 61843 6 Підписне Тираж 23 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMicro-mechanical gyroscope
Автори англійськоюBondar Pavlo Mykhailovych, Loshkariova Kateryna Valeriivna, Zhytnyk Tetiana Serhiivna
Назва патенту російськоюМикромеханический гироскоп
Автори російськоюБондарь Павел Михайлович, Лошкарева Екатерина Валериевна, Житник Татьяна Сергеевна
МПК / Мітки
МПК: G01C 23/00
Мітки: мікромеханічний, гіроскоп
Код посилання
<a href="https://ua.patents.su/3-61843-mikromekhanichnijj-giroskop.html" target="_blank" rel="follow" title="База патентів України">Мікромеханічний гіроскоп</a>
Поплавковий гіроскоп

Номер патенту: 61841
Опубліковано: 25.07.2011
Автори: Мельник Вікторія Миколаївна, Карачун Володимир Володимирович, Тривайло Михайло Семенович
МПК: G01C 19/20
Мітки: гіроскоп, поплавковий
Формула / Реферат:
Поплавковий гіроскоп, що містить корпус з циліндричною частково заповненою робочою рідиною порожниною і розташований в порожнині корпусу гіровузол з опорами і датчиками вимірювань відхилень від заданого курсу, який відрізняється тим, що зовнішня поверхня корпусу в поздовжньому напрямку має бочкоподібну форму.
Півсферичний резонаторний гіроскоп з складовим резонатором
Номер патенту: 24037
Опубліковано: 11.06.2007
Автори: Яценко Юрій Олексійович, Чіковані Валерій Валеріанович, Щербань Володимир Іванович, Коваленко Володимир Анатолійович
МПК: G01C 19/00
Мітки: гіроскоп, складовим, резонатором, півсферичний, резонаторний
Формула / Реферат:
1. Півсферичний резонаторний гіроскоп з складовим резонатором, що містить півсферичний резонатор, кільцевий електрод збудження і множину ємкісних електродів для підтримки коливань півсферичного резонатора і зняття інформації, розташованих у вузлах і пучностях коливань півсферичного резонатора, який відрізняється тим, що в ньому півсферичний резонатор виконаний без ніжки і містить отвір в його полюсі, кільцевий електрод збудження виконаний у...
Півсферичний резонаторний гіроскоп з складовим резонатором

Номер патенту: 24460
Опубліковано: 25.06.2007
Автори: Щербань Володимир Іванович, Чіковані Валерій Валеріанович, Коваленко Володимир Анатолійович, Яценко Юрій Олексійович
МПК: G01C 19/00
Мітки: складовим, півсферичний, гіроскоп, резонатором, резонаторний
Формула / Реферат:
1. Півсферичний резонаторний гіроскоп з складовим резонатором, що містить півсферичний резонатор, кільцевий електрод збудження і множину ємкісних електродів для зняття інформації, розташованих у вузлах і пучностях коливань півсферичного резонатора, який відрізняється тим, що в ньому півсферичний резонатор виконаний без ніжки і оснащений отвором в його полюсі, кільцевий електрод збудження виконаний у вигляді п'єзоелектричного диска з отвором...
Вібраційний гіроскоп, чутливий до коріолісового прискорення
Номер патенту: 22153
Опубліковано: 10.04.2007
Автори: Яценко Юрій Олексійович, Чіковані Валерій Валеріанович, Коваленко Володимир Анатолійович
МПК: G01C 19/56
Мітки: гіроскоп, коріолісового, чутливий, вібраційний, прискорення
Формула / Реферат:
1. Вібраційний гіроскоп, чутливий до Коріолісового прискорення, який містить основу, резонатор, виконаний у вигляді циліндра з днищем, п'єзоелектричні елементи збудження і знімання інформації та вимірювальний контур, який відрізняється тим, що резонатор має нижню і верхню частини, при цьому нижня частина циліндра, з'єднана з днищем, виконана гнучкою з меншою товщиною стінок, ніж верхня жорстка частина, в днищі виконана множина отворів,...
Півсферичний резонаторний гіроскоп зі складовим резонатором
Номер патенту: 24057
Опубліковано: 11.06.2007
Автори: Щербань Володимир Іванович, Яценко Юрій Олексійович, Коваленко Володимир Анатолійович, Чіковані Валерій Валеріанович
МПК: G01C 19/00
Мітки: резонаторний, півсферичний, гіроскоп, резонатором, складовим
Формула / Реферат:
1. Півсферичний резонаторний гіроскоп зі складовим резонатором, що містить півсферичний резонатор і кільцевий електрод збудження, який відрізняється тим, що в ньому півсферичний резонатор виконаний без ніжки і має отвір в його полюсі, кільцевий електрод збудження виконаний у вигляді п'єзоелектричного диска з отвором по центру і з провідною поверхнею, розбитою на сегменти, які створюють окремі групи, перша з яких для подачі на її сегменти...
Попередній патент: Спосіб підсилення радіохвиль
Наступний патент: Блок відмовостійких сервоприводів для каналу тангажа
Випадковий патент: Спосіб запобігання захворюванню медоносних бджіл нозематозом