Пристрій багатоканального вводу сигналів програмованого контролера
Номер патенту: 62641
Опубліковано: 15.12.2003
Автори: Назаренко Віталій Вікторович, Макаров Микита Сергійович, Цилюрік Леонід Іванович, Макаров Сергій Анатольович
Формула / Реферат
Пристрій багатоканального вводу сигналів програмованого контролера, який містить контролер, мультиплексор, до інформаційних входів якого підключені перші виходи датчиків дискретних сигналів, який відрізняється тим, що до виходу мультиплексора підключений вхід таймера та перший кінець конденсатора, другий кінець якого підключений до нульової шини, а до виходу таймера підключені: вхід переривань контролера, лічильний вхід лічильника, другі кінці датчиків дискретних сигналів, паралельно яким підключені опори, перші кінці датчиків опору, другі кінці яких підключені до інформаційних входів мультиплексора, до адресних входів якого підключені інформаційні виходи лічильника, вхід скидання у нуль якого підключений до дискретного виходу контролера.
Текст
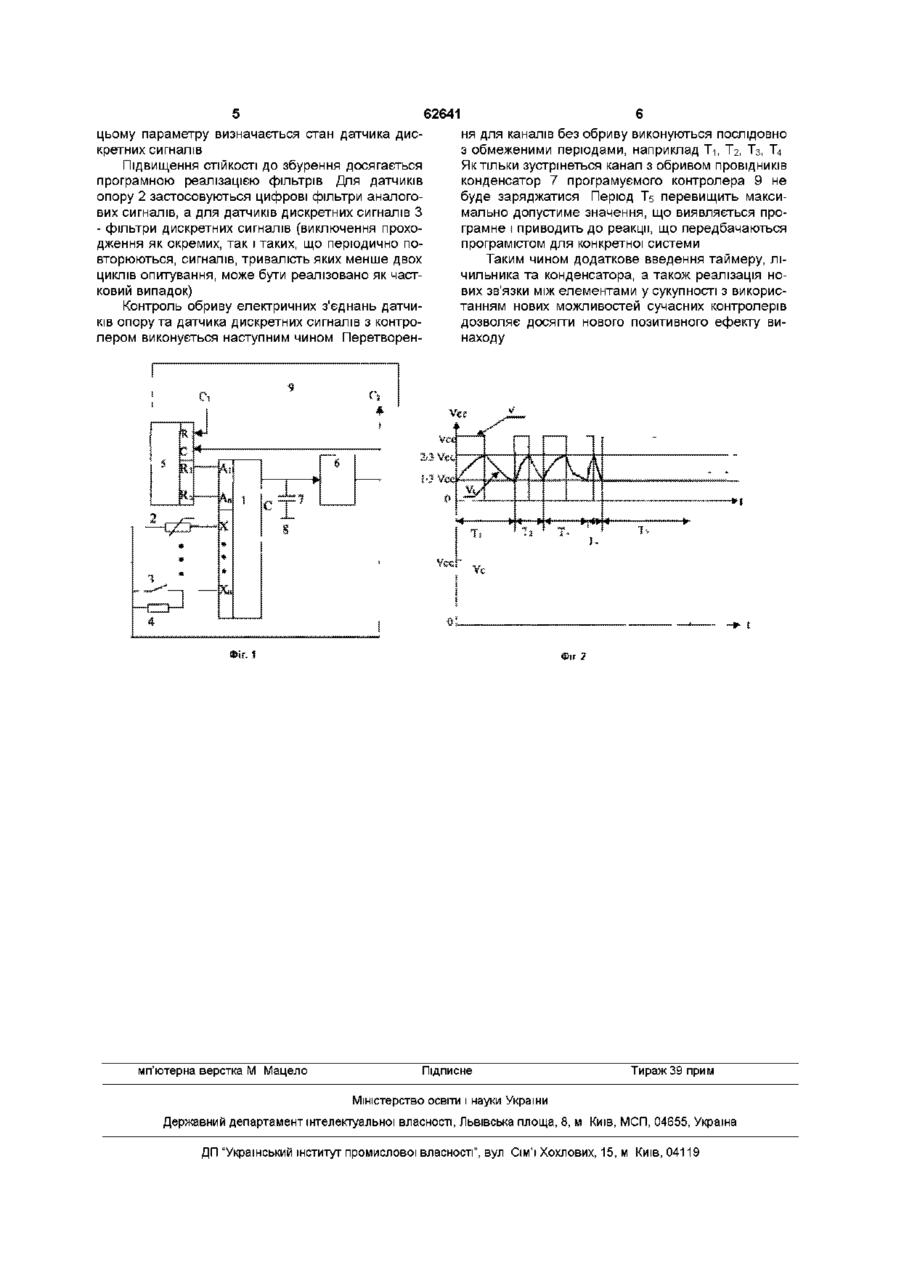
Пристрій багатоканального вводу сигналів програмованого контролера, який містить контролер, мультиплексор, до інформаційних входів якого підключені перші виходи датчиків дискретних сигналів, який відрізняється тим, що до виходу мультиплексора підключений вхід таймера та перший кінець конденсатора, другий кінець якого підключений до нульової шини, а до виходу таймера підключені вхід переривань контролера, лічильний вхід лічильника, другі КІНЦІ датчиків дискретних сигналів, паралельно яким підключені опори, перші КІНЦІ датчиків опору, другі КІНЦІ ЯКИХ підключені до інформаційних входів мультиплексора, до адресних входів якого підключені інформаційні виходи лічильника, вхід скидання у нуль якого підключений до дискретного виходу контролера Винахід відноситься до області управління технологічними процесами і може бути використаний у системах з послідовним вводом сигналів з датчиків, наприклад у системах управління кондицюнуванням повітря Відомий пристрій вимірювання електричного опору, що використовує мікросхему таймера, датчик опору і конденсатор Основною перевагою даного пристрою є простота і універсальність З його допомогою можна вимірювати багато параметрів технологічних процесів, для яких існують датчики опору, наприклад, температури, положення, тощо [1] Недоліком відомого пристрою є те, що при багатоканальному вимірюванні опору датчиків для кожного каналу необхідно використовувати свою схему перетворення, що суттєво підвищує КІЛЬКІСТЬ електронних компонентів і підвищує вартість системи Крім того для підключення такого пристрою до програмуємого контролера необхідно використовувати велику КІЛЬКІСТЬ ЙОГО дискретних входів та виходів Найбільш близьким за технічною сутністю та результатом, що досягається, є пристрій для опитування входів програмуємого контролера що складається із мультиплексора, першого і другого блоків пам'яті, першого і другого запам'ятовуючих елементів, елемента виключне або і елемента І Інформаційні входи мультіплексера через елементи узгодження з'єднані з дискретними датчиками об'єкта управління Входи запису обох запам'ятовуючих елементів входи вибірки обох блоків пам'яті даних і один вхід елемента І підключені до виходів синхронізації, а адресні входи мультиплексора і обох блоків пам'яті даних - до ВІДПОВІДНИХ адресних виходів програмуємого контролера Наявність елемента виключне або і елемента І, а також їх зв'язків МІЖ собою та іншими елементами схеми виключає проходження як окремих, так і таких, що періодично повторюються, сигналів, тривалість яких менше двох циклів опитування [2] Недоліками прототипу є низька функціональність пристрою, можливий ввід у контролер тільки дискретних сигналів, і велика КІЛЬКІСТЬ дискретних входів та виходів, що використовуються для підключення до контролера Необхідно також ВІДМІТИТИ, що у прототипі підвищення надійності роботи пристрою досягається схемно шляхом введення двох блоків пам'яті даних, двох запам'ятовуючих елементів, одного елемента І та одного елемента виключне або По перше, вказані елементи не оправдано ускладнюють схему, бо при наявності контролера функцію зменшення чутливості до збурень можна реалізувати програмне По друге, введення цих елементів не вирішує задачу контролю ЦІЛЬНОСТІ електричних з'єднань, за допомогою яких датчики підключені до контролера Якщо такий обрив буде мати місце, то невірний сигнал може повторюватися більше двох разів, що призведе до його вводу як правильного у прототипі (О (О 62641 Завданням винаходу є підвищення функціональних можливостей пристрою для опитування входів програмуємого контролера шляхом додаткової реалізації можливостей вводу сигналів з датчиків опору та контролю обриву провідників, що використовуються для підключення датчиків, а також спрощення пристрою за рахунок програмної реалізації функції проходження як окремих, так і таких, що періодично повторюються, сигналів, тривалість яких менше двох циклів опитування, а також зменшення КІЛЬКОСТІ з'єднань між програмуємим контролером і пристроєм Поставлене завдання досягається тим, що пристрій багатоканального вводу сигналів програмуємого контролера, який містить контролер, мультиплексор до інформаційних входів якого підключені перші КІНЦІ датчиків дискретних сигналів, згідно з даним винаходом, до виходу мультиплексора підключені вхід таймеру та перший кінець конденсатора, другий кінець якого підключений до нульової шини, а до виходу таймера підключені вхід переривань контролера, лічильний вхід лічильника, другі КІНЦІ датчиків дискретних сигналів, паралельно яким підключені опори, перші КІНЦІ датчиків опору, другі КІНЦІ ЯКИХ підключені до інформаційних входів мультиплексору до адресних входів якого підключені інформаційні виходи лічильника, вхід скидання у нуль якого підключений до дискретного виходу контролера Таким чином додаткове введення таймеру, лічильника та конденсатора, а також реалізація нових зв'язки між елементами дозволяє досягти нового позитивного ефекту винаходу, що виражається в підвищенні функціональності за рахунок можливостей додаткового вводу сигналів з датчиків опору і контролю обриву електричних провідників, що використовуються для їх підключення, а також спрощення схеми за рахунок програмної реалізації схеми контролю, та зменшення КІЛЬКОСТІ електричних з'єднань між программуємим контролером та пристроєм Винахід пояснюється кресленнями, де на фіг 1 приведена структурна схема пристрою, а на фіг 2 діаграми його роботи Пристрій складається з мультиплексора 1, до інформаційних входів якого підключені другі КІНЦІ датчиків опору 2 та перші КІНЦІ датчиків дискретних сигналів 3, паралельно яким підключені опори 4, до адресних входів мультиплексора 1 підключені інформаційні виходи лічильника 5, а до виходу мультеплексора 1, підключений вхід таймару 6 підключені та першій кінець конденсатора 7, другий кінець якого підключений до нульової шини 8 До виходу таймара 6 вхід переривань контролера 9, лічильний вхід лічильника 5, другі КІНЦІ датчиків дискретних сигналів 3, перші КІНЦІ датчиків опору 2 Вхід скидання у нуль лічильника підключений до діскретного виходу контролера 9 Пристрій працює таким чином При включенні контролер виконує програму початкової ініціалізації, яка установлює перший лічильник програмуємого контролера 9 у режим роботи таймера, розряд С1 порта у режим дискретного виходу а розрад С2 у режим дискретного входу з генерацією переривань по фронту сигналу, що поступає з виходу таймера 6, і записом поточ ного значення коду першого лічильника у шістнадцяти розрядний регістр захвата ICR1H.L програмуємого контролера 9 [В В Гребнев Контроллеры семейства AVR ATMEL Издательское предприятие Радиософт Москва, 2002 ] Далі програма початкової ініціалізації скидає у нуль програмно організований лічильник каналів, розрядність якого співпадає з розрядністю лічильника 5, програмно генерує короткий імпульс на виході Сі програмуємого контролера, що поступає на вхід R лічильника 5 і скидає його у нуль Крім того програма початкової ініціалізації запам'ятовує поточне значення першого таймера програмуємого контролера 9, надалі Трг Перетворення по кожному каналу виконуються циклічно наступним чином Нульовий код лічильника 5 Ri Rn поступає на входи адреса Аі Ап мультиплексора 1, що приводить до підключення датчика опору 2 до конденсатора 7 і таймеру 6 На виході таймеру б появляється напруга Vc2 Конденсатор 7 починає заряджатися відносно шини 8 і коли напруга Vc на ньому досягне значення 2/3 Vcc вихід таймера 6 переключається у нуль і напруга Vc знижається до значення 1/3 Vcc Це приводить до появи фронту імпульсу VT на виході таймара 6, який поступає на вхід С лічильника 5 і переключає його у наступний стан Одночасно фронт імпульсу VT поступає на вхід C-z програмуємого контролера 9, що приводить до запису поточного коду першого таймера контролера 9 у шістнадцяти розрядного регістра захвата ICR1H.L, і передачі управління програмі обробки переривання по фронту даного сигналу Програма обробки переривання обчислює код перетворення інтервалу Ті у код Кті шляхом віднімання коду Трг від поточного коду регістра ICR1H.L програмуємого контролера 9 Після обчислення коду Кп на місце попереднього значення коду Трг записується поточне значення коду шістнадцяти розрядного регістра захвата ICRIH.L програмуємого контролера 9 для його використання на наступному циклі у ролі попереднього Крім того значення коду Кп запам'ятовується у масиві памяти програмуємого контролера 9 номер елемента масива співпадає з значенням програмне організованого лічильника каналів, після чого значення цього лічильника збільшується на одиницю Одночасно фронт імпульсу VT переключає лічильник 5 у наступний стан і аналогічно інтервалу Ті виконується перетворення опору наступного датчика у код Ктг на інтервалі Тг Цикли перетворення виконуються послідовно для усіх каналів поки при появі наступного фронту імпульсу VT значення програмне організованого лічильника каналів не перевищить максимальну КІЛЬКІСТЬ каналів Тоді значення програмне організованого лічильника каналів обнуляється, генерується імпульс Vci і цикл перетворення по всім каналам повторюється Надалі коди перетворення Кті служать для обчислення значень фізичних параметрів на виході датчиків опору, наприклад температури Перетворення сигналу дискретного датчика має свої особливості При замкнутому стані датчика дискретних сигналів 3, період перетворення буде коротким При розімкнутому стані період буде визначатися значенням опору 4 і буде більшим По 62641 цьому параметру визначається стан датчика дискретних сигналів Підвищення СТІЙКОСТІ до збурення досягається програмною реалізацією фільтрів Для датчиків опору 2 застосовуються цифрові фільтри аналогових сигналів, а для датчиків дискретних сигналів З - фільтри дискретних сигналів (виключення проходження як окремих, так і таких, що періодично повторюються, сигналів, тривалість яких менше двох циклів опитування, може бути реалізовано як частковий випадок) Контроль обриву електричних з'єднань датчиків опору та датчика дискретних сигналів з контролером виконується наступним чином Перетворен мп'ютерна верстка М Мацело ня для каналів без обриву виконуються послідовно з обмеженими періодами, наприклад Т-і, Тг, Тз, Т4 Як тільки зустрінеться канал з обривом провідників конденсатор 7 програмуємого контролера 9 не буде заряджатися Період Ts перевищить максимально допустиме значення, що виявляється програмне і приводить до реакції, що передбачаються програмістом для конкретної системи Таким чином додаткове введення таймеру, лічильника та конденсатора, а також реалізація нових зв'язки між елементами у сукупності з використанням нових можливостей сучасних контролерів дозволяє досягти нового позитивного ефекту винаходу Підписне Тираж39 прим Міністерство освіти і науки України Державний департамент інтелектуальної власності, Львівська площа, 8, м Київ, МСП, 04655, Україна ДП "Український інститут промислової власності", вул Сім'ї Хохлових, 15, м Київ, 04119
ДивитисяДодаткова інформація
Назва патенту англійськоюMultichannel device for entering signals into a programmable controller
Назва патенту російськоюМногоканальное устройство для ввода сигналов в программируемый контроллер
МПК / Мітки
МПК: G05B 19/18
Мітки: сигналів, контролера, програмованого, багатоканального, пристрій, вводу
Код посилання
<a href="https://ua.patents.su/3-62641-pristrijj-bagatokanalnogo-vvodu-signaliv-programovanogo-kontrolera.html" target="_blank" rel="follow" title="База патентів України">Пристрій багатоканального вводу сигналів програмованого контролера</a>
Пристрій вводу даних в комп’ютерний томограф
Номер патенту: 50269
Опубліковано: 15.10.2002
Автори: Скрипець Андрій Васильович, Зеленков Олександр Аврамович, Соченко Петро Степанович, Цвігун Григорій Володимирович
МПК: A61B 6/03
Мітки: пристрій, комп'ютерній, вводу, даних, томограф
Формула / Реферат:
Пристрій вводу даних в комп'ютерний томограф містить багатоелементний детектор-інтегратор рентгенівського випромінювання, аналоговий мультиплексор, аналого-цифровий перетворювач, буферний запам'ятовуючий пристрій, цифровий мультиплексор, порт вводу даних в мікропроцесор, який відрізняється тим, що дані вимірювань вводяться паралельно в окремі секції буферного запам'ятовуючого пристрою за допомогою модулів вводу, причому кожний модуль вводу...
Пристрій для багатоканального магнітного запису та відтворення сигналів
Номер патенту: 8886
Опубліковано: 30.09.1996
Автори: Макаренко Володимир Васильович, Подтепа Віктор Олексійович, Любашенко Юрій Вікторович, Местечкіна Галина Донівна
МПК: G11B 5/035
Мітки: магнітного, багатоканального, сигналів, запису, відтворення, пристрій
Формула / Реферат:
Устройство для многоканальной магнитной записи и воспроизведения сигналов, содержащее в канале записи входные шины информационных сигналов, каждая из которых подключена к головке записи информационного сигнала, генератор опорного сигнала, головки записи опорного сигнала, а в каждой группе каналов воспроизведения головки воспроизведения информационных и опорных сигналов, подключенные к соответствующим усилителям воспроизведения, линию...
Пристрій для багатоканального магнітного запису та відтворення сигналів
Номер патенту: 8891
Опубліковано: 30.09.1996
Автори: Местечкіна Галина Донівна, Макаренко Володимир Васильович
МПК: G11B 5/09, G11B 20/00
Мітки: магнітного, багатоканального, сигналів, пристрій, відтворення, запису
Формула / Реферат:
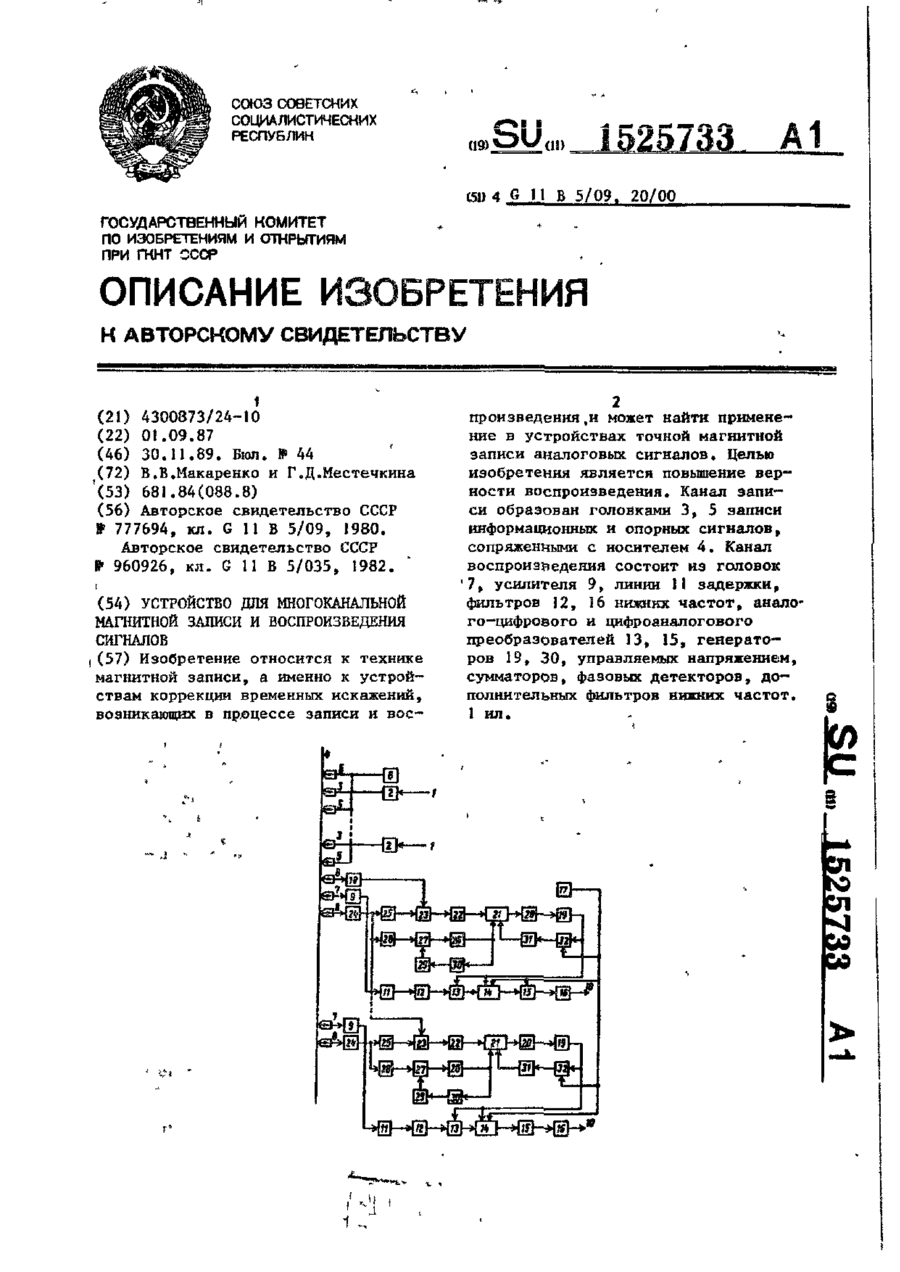
Устройство для многоканальной магнитной записи и воспроизведения сигналов, содержащее в канале записи входные шины информационных сигналов, каждая из которых подключена через усилитель записи к головке записи информационных сигналов, генератор опорного сигнала, головки записи опорного сигнала, а в каждой группе каналов воспроизведения - головки воспроизведения информационных и опорного сигналов, подключенные к соответствующим усилителям...
Пристрій виявлення сигналів
Номер патенту: 37871
Опубліковано: 15.05.2003
Автори: Мокеєв Юрій Геннадійович, Траілін Вячеслав Федорович, КОНОНОВИЧ ВІКТОР ЯКОВИЧ, Падалко Віктор Григорович, Каспирович Олександр Геннадійович, Лаврентьєв Володимир Миколайович, Мирошниченко Михайло Іванович, КОПНОВ МИХАЙЛО ОЛЕКСАНДРОВИЧ, Немчин Олександр Федорович
МПК: G01S 7/02
Мітки: пристрій, виявлення, сигналів
Формула / Реферат:
Пристрій виявлення сигналів , який містить розв'язувальний блок, який відрізняється тим, що додатково містить блок оцінки рівня шуму, допоміжний блок затримки, об'єднані входи яких є входом пристрою, подільник, вхід якого підключений до виходу допоміжного блока затримки, послідовно з'єднані (k-1) блоки затримки, виходи кожного з яких та вхід першого підключені відповідно до перших входів k компараторів, вхід першого блока затримки з'єднаний...
Пристрій виявлення сигналів інформації
Номер патенту: 37871
Опубліковано: 15.05.2001
Автори: КОПНОВ МИХАЙЛО ОЛЕКСАНДРОВИЧ, Мирошниченко Михайло Іванович, Каспирович Олександр Геннадійович, Немчин Олександр Федорович, КОНОНОВИЧ ВІКТОР ЯКОВИЧ, Мокеєв Юрій Геннадійович, Лаврентьєв Володимир Миколайович, Падалко Віктор Григорович, Траілін Вячеслав Федорович
МПК: G01S 7/02
Мітки: інформації, сигналів, пристрій, виявлення
Формула / Реферат:
Пристрій виявлення сигналів , який містить розв'язувальний блок, який відрізняється тим, що додатково містить блок оцінки рівня шуму, допоміжний блок затримки, об'єднані входи яких є входом пристрою, подільник, вхід якого підключений до виходу допоміжного блока затримки, послідовно з'єднані (k-1) блоки затримки, виходи кожного з яких та вхід першого підключені відповідно до перших входів k компараторів, вхід першого блока затримки з'єднаний...
Попередній патент: Спосіб комплексного лікування конглобатної форми розацеа
Наступний патент: Пристрій для охолодження листового прокату на рольгангу
Випадковий патент: Модульний гірничо-збагачувальний комплекс