Спосіб параметричного збудження механічних коливань
Номер патенту: 63716
Опубліковано: 15.01.2004
Автори: Пивоваров Лев Володимирович, Суботін Олег Володимирович
Формула / Реферат
Винахід відноситься до галузі машинобудування і може застосовуватися у віброгасниках і параметричних генераторах коливань.
Способи параметричного збудження механічних коливань, реалізовані на основі винаходу, можуть бути використані для збудження коливань у механічних енергосилових установках, стаціонарних накопичувачах енергії, а також у системах компенсації динамічних навантажень.
Відомий спосіб збудження механічних коливань у системі масою, що додатково вводиться, для зменшення її змушених коливань, відповідно до якого робоче тіло містить додатковий вантаж Мд, що є віброгасником, з'єднаний з основною масою за допомогою пружини з коефіцієнтом жорсткості Сд. При певному співвідношенні Мд і Сд амплітуда змушених коливань основної маси буде дорівнювати нулю [1, 2].
Однак цілком механічна конструкція такого пристрою є досить громіздкою й інерційною, що утрудняє її застосування в електромеханічних системах.
Відомий також, обраний як прототип, спосіб поглинання крутильних коливань, запропонований Тейлором у 1936р., що полягає в тім, що до однієї з коливних мас системи то (диск, маховик) на відстані L від її осі обертання прикріплюється маятник з масою Mm (маятник Тейлора), на котрий діє зовнішній момент М. Коливання маятника здатні компенсувати крутильні коливання системи [3].
Вказаний спосіб припускає громіздкість конструкції, що визначає велику інерційність системи, неможливість генерації адекватних параметричних коливань маятника на високих частотах, що обмежує можливості його застосування.
Використання додаткового могутнього джерела енергії для реалізації коливальних рухів маятника і неможливість переміщення його уздовж осі диска (робочого тіла, маховика) робить систему енергоємною і малоефективною.
Відсутня можливість збудження крутильних коливань диска необоротність системи.
В основу винаходу поставлена задача усунення зазначених недоліків шляхом введення в систему додаткового дебалансного тіла (д-тіло) яке рухається в радіальних напрямних і має масу значно менше маси робочого тіла.
Суть винаходу складається в можливості генерування параметричних коливань робочого тіла з заданою амплітудою і частотою за рахунок адекватних коливань д-тіла.
Поставлена задача вирішується тим, що в способі поглинання крутильних коливань системи замість маятника Тейлора вводиться додаткове тіло (д-тіло), здатне здійснювати примусові зворотно-поступальні рухи уздовж радіальних напрямних і параметричний генератор коливань д-тіла (генератор накачування), що дозволяє шляхом зсуву центра мас системи викликати змушені коливання робочого тіла. Основна відзнака запропонованого пристрою складається в реалізації принципу параметричного збудження механічних коливань д-тіла.
Принцип параметричного збудження механічних коливань плоского однорідного важкого диска на горизонтальній осі обертання заснований на періодичній фазосинхронній зміні радіальної координати центра ваги диска. Для цих цілей використовується допоміжна дебалансна маса (д-тіло), вага якого Р значно менше ваги диска Р0. Під дією яких-небудь періодичних імпульсних сил д-тіло може здійснювати відносний радіальний зворотно-поступальний рух. Амплітуда коливань д-тіла регулюється, а імпульси сили діють на д-тіло кожен раз, коли радіус-вектор r збігається з вертикальною віссю і вектором полю земного тяжіння.
Застосування відносно легкого дебалансного тіла обумовлює невеликий обертаючий момент, прискорення і збільшує час розгону диска. Однак застосування д-тіла, маса якого значно менше маси робочого тіла, дозволяє збільшити к.к.д. і ефективність параметричного генератора коливань за рахунок того, що точкою опори д-тіла є саме робоче тіло, яке обертається з кутовою швидкістю . При великих частотах обертання диска кінетичну енергію д-тіла можливо зменшувати за рахунок зменшення амплітуди r його коливань, тим самим зменшуючи витрату енергії параметричного генератора коливань.
Крім того, відповідно до запропонованого способу, можна забезпечити формування механічних коливань д-тіла в протифазі виникаючим динамічним навантаженням з амплітудою, пропорційній величині навантаження, збільшуючи стійкість наданої електромеханічної системи до зовнішніх параметричних збурювань.
Для підвищення ефективності коливальної системи можливе використання декількох д-тіл, що дозволить збільшити обертаючий момент, прискорення і зменшить час розгону диска.
Заявлений спосіб реалізується таким чином.
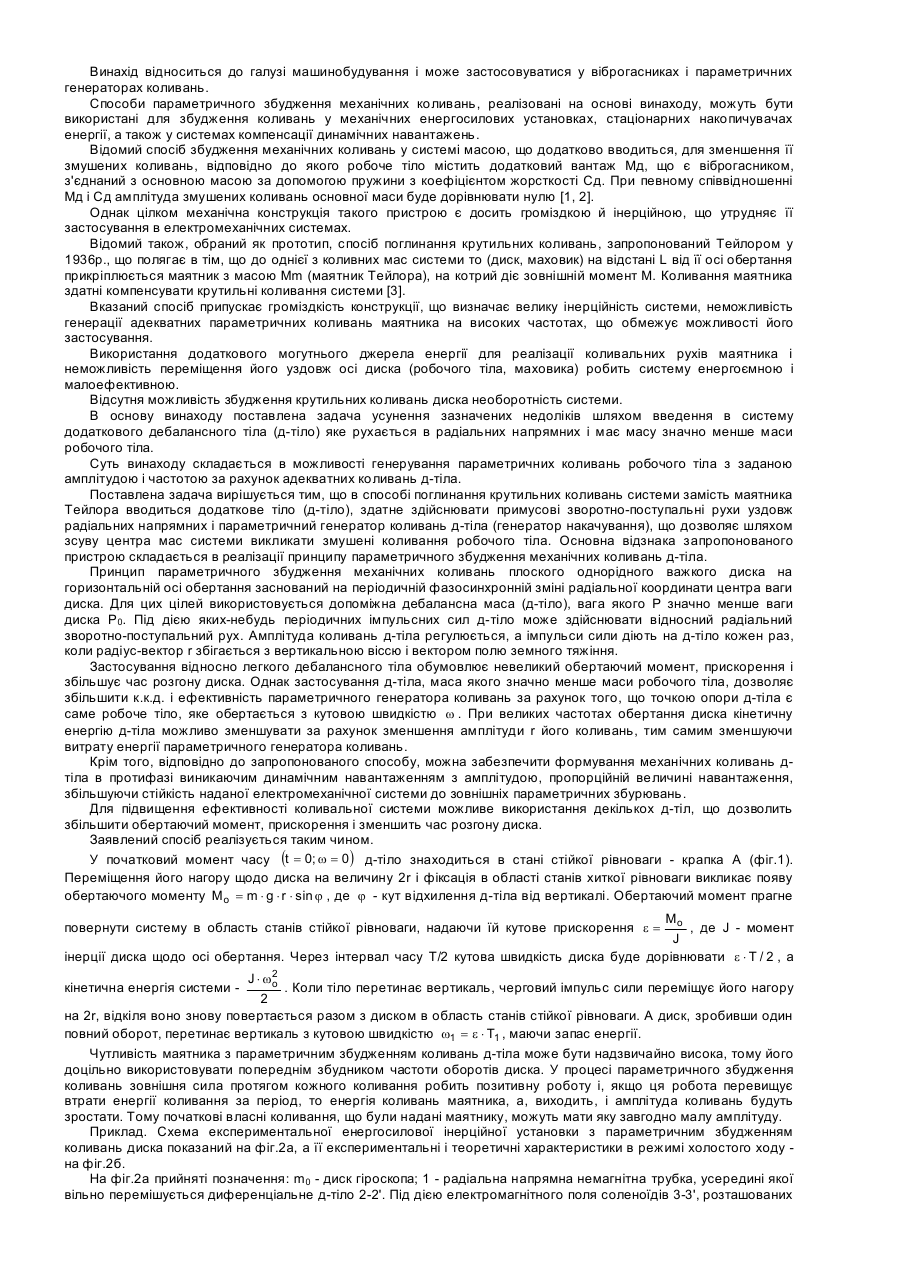
У початковий момент часу д-тіло знаходиться в стані стійкої рівноваги - крапка А (фіг.1). Переміщення його нагору щодо диска на величину 2r і фіксація в області станів хиткої рівноваги викликає появу обертаючого моменту , де - кут відхилення д-тіла від вертикалі. Обертаючий момент прагне повернути систему в область станів стійкої рівноваги, надаючи їй кутове прискорення , де J - момент інерції диска щодо осі обертання. Через інтервал часу Т/2 кутова швидкість диска буде дорівнювати , а кінетична енергія системи - . Коли тіло перетинає вертикаль, черговий імпульс сили переміщує його нагору на 2r, відкіля воно знову повертається разом з диском в область станів стійкої рівноваги. А диск, зробивши один повний оборот, перетинає вертикаль з кутовою швидкістю , маючи запас енергії.
Чутливість маятника з параметричним збудженням коливань д-тіла може бути надзвичайно висока, тому його доцільно використовувати попереднім збудником частоти оборотів диска. У процесі параметричного збудження коливань зовнішня сила протягом кожного коливання робить позитивну роботу і, якщо ця робота перевищує втрати енергії коливання за період, то енергія коливань маятника, а, виходить, і амплітуда коливань будуть зростати. Тому початкові власні коливання, що були надані маятнику, можуть мати яку завгодно малу амплітуду.
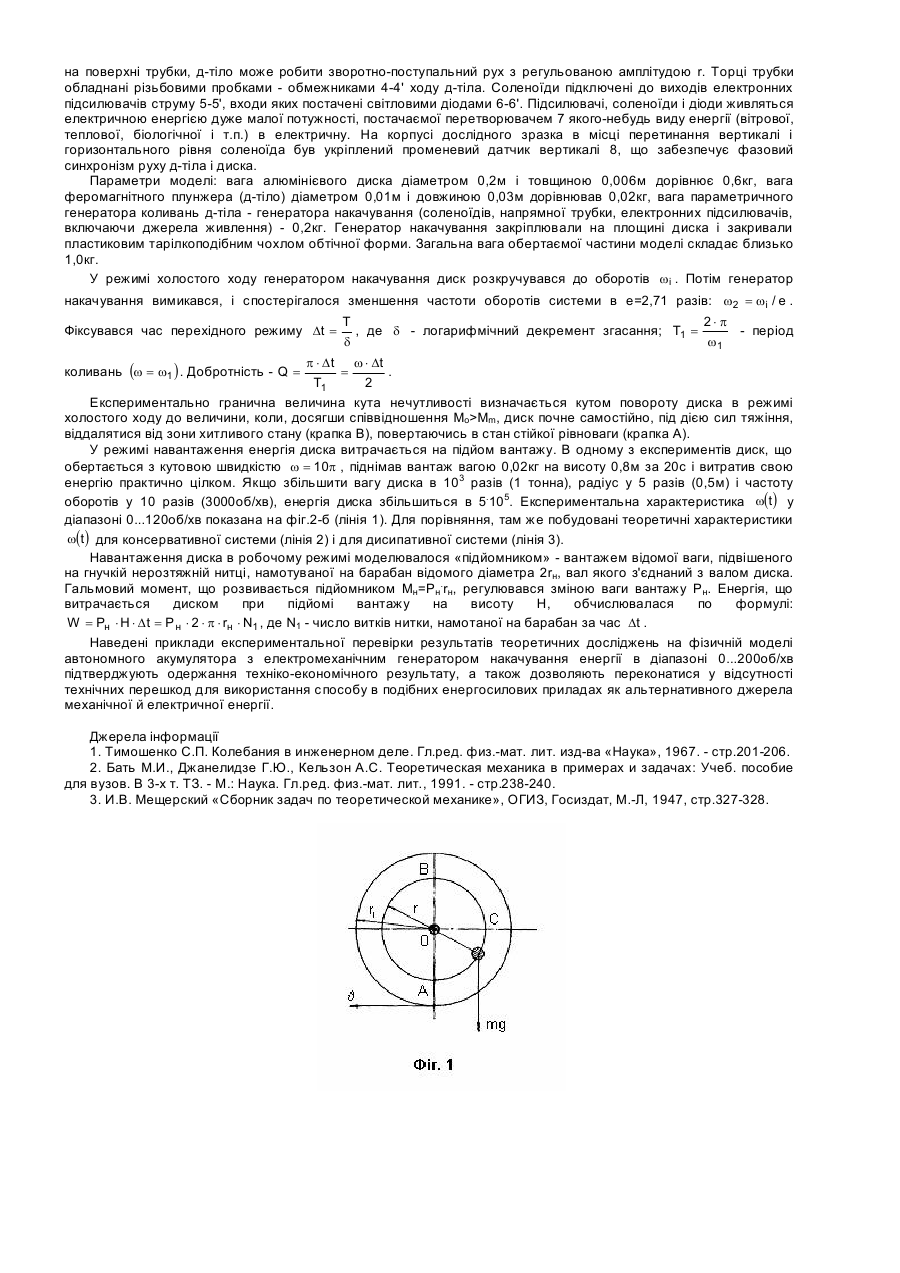
Приклад. Схема експериментальної енергосилової інерційної установки з параметричним збудженням коливань диска показаний на фіг.2а, а її експериментальні і теоретичні характеристики в режимі холостого ходу - на фіг.2б.
На фіг.2а прийняті позначення: m0 - диск гіроскопа; 1 - радіальна напрямна немагнітна трубка, усередині якої вільно перемішується диференціальне д-тіло 2-2'. Під дією електромагнітного поля соленоїдів 3-3', розташованих на поверхні трубки, д-тіло може робити зворотно-поступальний рух з регульованою амплітудою r. Торці трубки обладнані різьбовими пробками - обмежниками 4-4' ходу д-тіла. Соленоїди підключені до виходів електронних підсилювачів струму 5-5', входи яких постачені світловими діодами 6-6'. Підсилювачі, соленоїди і діоди живляться електричною енергією дуже малої потужності, постачаємої перетворювачем 7 якого-небудь виду енергії (вітрової, теплової, біологічної і т.п.) в електричну. На корпусі дослідного зразка в місці перетинання вертикалі і горизонтального рівня соленоїда був укріплений променевий датчик вертикалі 8, що забезпечує фазовий синхронізм руху д-тіла і диска.
Параметри моделі: вага алюмінієвого диска діаметром 0,2м і товщиною 0,006м дорівнює 0,6кг, вага феромагнітного плунжера (д-тіло) діаметром 0,01м і довжиною 0,03м дорівнював 0,02кг, вага параметричного генератора коливань д-тіла - генератора накачування (соленоїдів, напрямної трубки, електронних підсилювачів, включаючи джерела живлення) - 0,2кг. Генератор накачування закріплювали на площині диска і закривали пластиковим тарілкоподібним чохлом обтічної форми. Загальна вага обертаємої частини моделі складає близько 1,0кг.
У режимі холостого ходу генератором накачування диск розкручувався до оборотів . Потім генератор накачування вимикався, і спостерігалося зменшення частоти оборотів системи в е=2,71 разів: . Фіксувався час перехідного режиму , де - логарифмічний декремент згасання; - період коливань . Добротність - .
Експериментально гранична величина кута нечутливості визначається кутом повороту диска в режимі холостого ходу до величини, коли, досягши співвідношення Мо>Мm, диск почне самостійно, під дією сил тяжіння, віддалятися від зони хитливого стану (крапка В), повертаючись в стан стійкої рівноваги (крапка А).
У режимі навантаження енергія диска витрачається на підйом вантажу. В одному з експериментів диск, що обертається з кутовою швидкістю , піднімав вантаж вагою 0,02кг на висоту 0,8м за 20с і витратив свою енергію практично цілком. Якщо збільшити вагу диска в 103 разів (1 тонна), радіус у 5 разів (0,5м) і частоту оборотів у 10 разів (3000об/хв), енергія диска збільшиться в 5.105. Експериментальна характеристика у діапазоні 0...120об/хв показана на фіг.2-б (лінія 1). Для порівняння, там же побудовані теоретичні характеристики для консервативної системи (лінія 2) і для дисипативної системи (лінія 3).
Навантаження диска в робочому режимі моделювалося «підйомником» - вантажем відомої ваги, підвішеного на гнучкій нерозтяжній нитці, намотуваної на барабан відомого діаметра 2rн, вал якого з'єднаний з валом диска. Гальмовий момент, що розвивається підйомником Mн=Pн.rн, регулювався зміною ваги вантажу Рн. Енергія, що витрачається диском при підйомі вантажу на висоту Н, обчислювалася по формулі: , де N1 - число витків нитки, намотаної на барабан за час .
Наведені приклади експериментальної перевірки результатів теоретичних досліджень на фізичній моделі автономного акумулятора з електромеханічним генератором накачування енергії в діапазоні 0...200об/хв підтверджують одержання техніко-економічного результату, а також дозволяють переконатися у відсутності технічних перешкод для використання способу в подібних енергосилових приладах як альтернативного джерела механічної й електричної енергії.
Джерела інформації
1. Тимошенко С.П. Колебания в инженерном деле. Гл.ред. физ.-мат. лит. изд-ва «Наука», 1967. - стр.201-206.
2. Бать М.И., Джанелидзе Г.Ю., Кельзон А.С. Теоретическая механика в примерах и задачах: Учеб. пособие для вузов. В 3-х т. ТЗ. - М.: Наука. Гл.ред. физ.-мат. лит., 1991. - стр.238-240.
3. И.В. Мещерский «Сборник задач по теоретической механике», ОГИЗ, Госиздат, М.-Л, 1947, стр.327-328.
Текст
Винахід відноситься до галузі машинобудування і може застосовуватися у віброгасниках і параметричних генераторах коливань. Способи параметричного збудження механічних коливань, реалізовані на основі винаходу, можуть бути використані для збудження коливань у механічних енергосилових установках, стаціонарних накопичувачах енергії, а також у системах компенсації динамічних навантажень. Відомий спосіб збудження механічних коливань у системі масою, що додатково вводиться, для зменшення її змушених коливань, відповідно до якого робоче тіло містить додатковий вантаж Мд, що є віброгасником, з'єднаний з основною масою за допомогою пружини з коефіцієнтом жорсткості Сд. При певному співвідношенні Мд і Сд амплітуда змушених коливань основної маси буде дорівнювати нулю [1, 2]. Однак цілком механічна конструкція такого пристрою є досить громіздкою й інерційною, що утрудняє її застосування в електромеханічних системах. Відомий також, обраний як прототип, спосіб поглинання крутильних коливань, запропонований Тейлором у 1936р., що полягає в тім, що до однієї з коливних мас системи то (диск, маховик) на відстані L від її осі обертання прикріплюється маятник з масою Mm (маятник Тейлора), на котрий діє зовнішній момент М. Коливання маятника здатні компенсувати крутильні коливання системи [3]. Вказаний спосіб припускає громіздкість конструкції, що визначає велику інерційність системи, неможливість генерації адекватних параметричних коливань маятника на високих частотах, що обмежує можливості його застосування. Використання додаткового могутнього джерела енергії для реалізації коливальних рухів маятника і неможливість переміщення його уздовж осі диска (робочого тіла, маховика) робить систему енергоємною і малоефективною. Відсутня можливість збудження крутильних коливань диска необоротність системи. В основу винаходу поставлена задача усунення зазначених недоліків шляхом введення в систему додаткового дебалансного тіла (д-тіло) яке рухається в радіальних напрямних і має масу значно менше маси робочого тіла. Суть винаходу складається в можливості генерування параметричних коливань робочого тіла з заданою амплітудою і частотою за рахунок адекватних коливань д-тіла. Поставлена задача вирішується тим, що в способі поглинання крутильних коливань системи замість маятника Тейлора вводиться додаткове тіло (д-тіло), здатне здійснювати примусові зворотно-поступальні рухи уздовж радіальних напрямних і параметричний генератор коливань д-тіла (генератор накачування), що дозволяє шляхом зсуву центра мас системи викликати змушені коливання робочого тіла. Основна відзнака запропонованого пристрою складається в реалізації принципу параметричного збудження механічних коливань д-тіла. Принцип параметричного збудження механічних коливань плоского однорідного важкого диска на горизонтальній осі обертання заснований на періодичній фазосинхронній зміні радіальної координати центра ваги диска. Для цих цілей використовується допоміжна дебалансна маса (д-тіло), вага якого Р значно менше ваги диска Р0. Під дією яких-небудь періодичних імпульсних сил д-тіло може здійснювати відносний радіальний зворотно-поступальний рух. Амплітуда коливань д-тіла регулюється, а імпульси сили діють на д-тіло кожен раз, коли радіус-вектор r збігається з вертикальною віссю і вектором полю земного тяжіння. Застосування відносно легкого дебалансного тіла обумовлює невеликий обертаючий момент, прискорення і збільшує час розгону диска. Однак застосування д-тіла, маса якого значно менше маси робочого тіла, дозволяє збільшити к.к.д. і ефективність параметричного генератора коливань за рахунок того, що точкою опори д-тіла є саме робоче тіло, яке обертається з кутовою швидкістю w . При великих частотах обертання диска кінетичну енергію д-тіла можливо зменшувати за рахунок зменшення амплітуди r його коливань, тим самим зменшуючи витрату енергії параметричного генератора коливань. Крім того, відповідно до запропонованого способу, можна забезпечити формування механічних коливань дтіла в протифазі виникаючим динамічним навантаженням з амплітудою, пропорційній величині навантаження, збільшуючи стійкість наданої електромеханічної системи до зовнішніх параметричних збурювань. Для підвищення ефективності коливальної системи можливе використання декількох д-тіл, що дозволить збільшити обертаючий момент, прискорення і зменшить час розгону диска. Заявлений спосіб реалізується таким чином. У початковий момент часу (t = 0; w = 0) д-тіло знаходиться в стані стійкої рівноваги - крапка А (фіг.1). Переміщення його нагору щодо диска на величину 2r і фіксація в області станів хиткої рівноваги викликає появу обертаючого моменту Mo = m × g × r × sin j , де j - кут відхилення д-тіла від вертикалі. Обертаючий момент прагне Mo , де J - момент J інерції диска щодо осі обертання. Через інтервал часу Т/2 кутова швидкість диска буде дорівнювати e × T / 2 , а повернути систему в область станів стійкої рівноваги, надаючи їй кутове прискорення e = кінетична енергія системи J × w2 o . Коли тіло перетинає вертикаль, черговий імпульс сили переміщує його нагору 2 на 2r, відкіля воно знову повертається разом з диском в область станів стійкої рівноваги. А диск, зробивши один повний оборот, перетинає вертикаль з кутовою швидкістю w1 = e × T1 , маючи запас енергії. Чутливість маятника з параметричним збудженням коливань д-тіла може бути надзвичайно висока, тому його доцільно використовувати попереднім збудником частоти оборотів диска. У процесі параметричного збудження коливань зовнішня сила протягом кожного коливання робить позитивну роботу і, якщо ця робота перевищує втрати енергії коливання за період, то енергія коливань маятника, а, виходить, і амплітуда коливань будуть зростати. Тому початкові власні коливання, що були надані маятнику, можуть мати яку завгодно малу амплітуду. Приклад. Схема експериментальної енергосилової інерційної установки з параметричним збудженням коливань диска показаний на фіг.2а, а її експериментальні і теоретичні характеристики в режимі холостого ходу на фіг.2б. На фіг.2а прийняті позначення: m0 - диск гіроскопа; 1 - радіальна напрямна немагнітна трубка, усередині якої вільно перемішується диференціальне д-тіло 2-2'. Під дією електромагнітного поля соленоїдів 3-3', розташованих на поверхні трубки, д-тіло може робити зворотно-поступальний рух з регульованою амплітудою r. Торці трубки обладнані різьбовими пробками - обмежниками 4-4' ходу д-тіла. Соленоїди підключені до виходів електронних підсилювачів струму 5-5', входи яких постачені світловими діодами 6-6'. Підсилювачі, соленоїди і діоди живляться електричною енергією дуже малої потужності, постачаємої перетворювачем 7 якого-небудь виду енергії (вітрової, теплової, біологічної і т.п.) в електричну. На корпусі дослідного зразка в місці перетинання вертикалі і горизонтального рівня соленоїда був укріплений променевий датчик вертикалі 8, що забезпечує фазовий синхронізм руху д-тіла і диска. Параметри моделі: вага алюмінієвого диска діаметром 0,2м і товщиною 0,006м дорівнює 0,6кг, вага феромагнітного плунжера (д-тіло) діаметром 0,01м і довжиною 0,03м дорівнював 0,02кг, вага параметричного генератора коливань д-тіла - генератора накачування (соленоїдів, напрямної трубки, електронних підсилювачів, включаючи джерела живлення) - 0,2кг. Генератор накачування закріплювали на площині диска і закривали пластиковим тарілкоподібним чохлом обтічної форми. Загальна вага обертаємої частини моделі складає близько 1,0кг. У режимі холостого ходу генератором накачування диск розкручувався до оборотів wi . Потім генератор накачування вимикався, і спостерігалося зменшення частоти оборотів системи в е=2,71 разів: w2 = wi / e . Фіксувався час перехідного режиму Dt = T 2× p - період , де d - логарифмічний декремент згасання; T1 = d w1 p × D t w × Dt = . T1 2 Експериментально гранична величина кута нечутливості визначається кутом повороту диска в режимі холостого ходу до величини, коли, досягши співвідношення Мо>Мm, диск почне самостійно, під дією сил тяжіння, віддалятися від зони хитливого стану (крапка В), повертаючись в стан стійкої рівноваги (крапка А). У режимі навантаження енергія диска витрачається на підйом вантажу. В одному з експериментів диск, що обертається з кутовою швидкістю w = 10p , піднімав вантаж вагою 0,02кг на висоту 0,8м за 20с і витратив свою енергію практично цілком. Якщо збільшити вагу диска в 103 разів (1 тонна), радіус у 5 разів (0,5м) і частоту оборотів у 10 разів (3000об/хв), енергія диска збільшиться в 5.105. Експериментальна характеристика w(t ) у діапазоні 0...120об/хв показана на фіг.2-б (лінія 1). Для порівняння, там же побудовані теоретичні характеристики w(t ) для консервативної системи (лінія 2) і для дисипативної системи (лінія 3). Навантаження диска в робочому режимі моделювалося «підйомником» - вантажем відомої ваги, підвішеного на гнучкій нерозтяжній нитці, намотуваної на барабан відомого діаметра 2rн, вал якого з'єднаний з валом диска. Гальмовий момент, що розвивається підйомником Mн=Pн.rн, регулювався зміною ваги вантажу Рн. Енергія, що витрачається диском при підйомі вантажу на висоту Н, обчислювалася по формулі: W Pн × H × D t Р н × 2 × p × rн × N1 , де N1 - число витків нитки, намотаної на барабан за час Dt . = = Наведені приклади експериментальної перевірки результатів теоретичних досліджень на фізичній моделі автономного акумулятора з електромеханічним генератором накачування енергії в діапазоні 0...200об/хв підтверджують одержання техніко-економічного результату, а також дозволяють переконатися у відсутності технічних перешкод для використання способу в подібних енергосилових приладах як альтернативного джерела механічної й електричної енергії. коливань (w = w1 ) . Добротність - Q = Джерела інформації 1. Тимошенко С.П. Колебания в инженерном деле. Гл.ред. физ.-мат. лит. изд-ва «Наука», 1967. - стр.201-206. 2. Бать М.И., Джанелидзе Г.Ю., Кельзон А.С. Теоретическая механика в примерах и задачах: Учеб. пособие для вузов. В 3-х т. ТЗ. - М.: Наука. Гл.ред. физ.-мат. лит., 1991. - стр.238-240. 3. И.В. Мещерский «Сборник задач по теоретической механике», ОГИЗ, Госиздат, М.-Л, 1947, стр.327-328.
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for parametric excitation of mechanical oscillations
Автори англійськоюSubotin Oleh Volodymyrovych
Назва патенту російськоюСпособ параметрического возбуждения механических колебаний
Автори російськоюСуботин Олег Владимирович, Субботин Олег Владимирович
МПК / Мітки
МПК: B06B 1/02
Мітки: механічних, спосіб, збудження, параметричного, коливань
Код посилання
<a href="https://ua.patents.su/3-63716-sposib-parametrichnogo-zbudzhennya-mekhanichnikh-kolivan.html" target="_blank" rel="follow" title="База патентів України">Спосіб параметричного збудження механічних коливань</a>
Спосіб збудження звукових коливань за допомогою динамічної сирени
Номер патенту: 32273
Опубліковано: 15.12.2000
Автори: Гнатейко Нонна Валентиновна, Карачун Володимир Володимирович, Тривайло Михайло Семенович, Петрик Олександр Владиславович
МПК: G10K 7/00
Мітки: динамічної, допомогою, збудження, звукових, коливань, спосіб, сирени
Текст:
...сирену та діаграми, які пояснюють здійснення способу, на фіг.2 зображено виникнення гіроскопічного моменту М внаслідок повороту Землі. Для цього використовують високооборотну динамічну сирену І з дисковим ротором 2 та його приводом 3. Корпус сирени обладнаний вертикальним валом 4, який закріплюється на встановленій на поверхні Землі 5 показана у зменшеному масштабі основі б та має привод з. 7 для примусового обертання сирени,...
Спосіб збудження сейсмічних коливань
Номер патенту: 57803
Опубліковано: 15.07.2003
Автори: Сиротенко Петро Тимофійович, Ковальчук Богдан Михайлович, Роман Володимир Іванович
МПК: G01V 1/02
Мітки: коливань, спосіб, збудження, сейсмічних
Формула / Реферат:
1. Спосіб збудження сейсмічних коливань, що включає використання для збудження сейсмічних коливань електромеханічного перетворювача з активною і реактивною частинами, формування і подавання на електромеханічний перетворювач електричного імпульсу, перетворення електричного імпульсу в силовий імпульс, який прикладається між реактивною і активною частинами електромеханічного перетворювача, і утворення силового імпульсу безпосередньо під час...
Пристрій для збудження звукових коливань у привибійній зоні пласта і стовбурі свердловин
Номер патенту: 42904
Опубліковано: 15.11.2001
Автори: Кондрат Олександр Романович, Кондрат Роман Михайлович, Климишин Ярослав Данилович
МПК: E21B 28/00, B06B 1/18
Мітки: свердловин, пристрій, зони, стовбурі, привибійній, звукових, збудження, коливань, пласта
Формула / Реферат:
1. Пристрій для збудження звукових коливань у привибійній зоні пласта і стовбурі свердловин, що містить ударник з поверхнями контакту, встановлений на вісі в пустотілому циліндричному корпусі, який відрізняється тим, що ударник виконаний симетричної Х-подібної форми з поверхнями контакту, розміщеними зсередини Х-подібних частин ударника, і містить жолобоподібний отвір для вісі довжиною, більшою діаметру вісі, виконаний впоперек ударника,...
Пристрій для збудження сейсмічних коливань
Номер патенту: 1748
Опубліковано: 15.04.2003
Автори: Бару Юрій Аркадійович, Зайцев Ігор Тимофійович, Мельник Анатолій Кирилович, Водаков Генріх Самуілович, Ткаченко Валерій Павлович
МПК: G01V 1/02
Мітки: збудження, пристрій, коливань, сейсмічних
Формула / Реферат:
1. Пристрій для збудження сейсмічних коливань, що містить зовнішній корпус, інертну масу, напрямну колону, опорну плиту, амортизатори, а також електромеханічний привід, що включає якір, кільцева магнітна система якого містить магнітопровід, встановлений у своєму корпусі, і індуктор, розташований з можливістю осьового переміщення по напрямній колоні без прокручування, при цьому його кільцева магнітна система містить магнітопровід, встановлений...
Пристрій для збудження сейсмічних коливань
Номер патенту: 15976
Опубліковано: 29.08.1997
Автори: Бадіков Миколай Васильович, Гладченко Валентин Яковлевич, Гурин Анатолій Григорович, Михайлусь Юрий Васильович, Набока Борис Григорович, Бяков Юрій Олексійович
МПК: G01V 1/02
Мітки: коливань, сейсмічних, збудження, пристрій
Формула / Реферат:
1. Устройство для возбуждения сейсмических колебаний, содержащее излучатель, зарядное устройство, емкостной накопитель энергии, включенные параллельно, и устройство коммутации, установленное последовательно в цепи излучателя, отличающееся тем, что, с целью повышения КПД устройства путем преобразования магнитной энергии в ударный импульс в момент получения ее максимального значения, в него дополнительно введены коммутатор разрыва цепи тока...
Попередній патент: Спосіб визначення максимального споживання кисню
Наступний патент: Регульований дросель
Випадковий патент: Пристрій для виявлення магнітних міток на сталевих канатах