Спосіб управління синхронним двигуном та пристрій для його реалізації
Номер патенту: 64084
Опубліковано: 16.02.2004
Автори: Родькін Дмитро Йосипович, Чорний Олексій Петрович, Морозов Олександр Олександрович
Формула / Реферат
1. Спосіб керування синхронним двигуном, що включає підключення двигуна до промислової мережі, подання на ротор напруги збудження, що містить постійну та змінну складові, який відрізняється тим, що в мережу збудження вводять складову струму з частотою 50 Гц регульованої амплітуди та фази по відношенню до напруги в мережі, задають амплітуду змінної складової струму збудження та здійснюють зміну кута зсуву фази змінної складової, контролюючи величину коливань, при досягненні мінімуму величини коливань, починають змінювати амплітуду змінної складової струму до досягнення мінімуму коливань, процес повторюють через заданий технологічними умовами інтервал часу.
2. Пристрій для керування синхронним двигуном, що містить синхронний двигун, датчик напруги мережі, збуджувач, який відрізняється тим, що він додатково оснащений джерелом змінної напруги з регульованою амплітудою і фазою вихідного сигналу, блоком пріоритетних контролюючих величин, входи якого зв’язані з виходами датчиків вібрації, обчислювальним блоком визначення мінімуму коливань, датчиками миттєвих значень напруги мережі та джерела змінної напруги, показником струму джерела змінного струму, вихід блока пріоритетних сигналів, вихід показника струму джерела змінного струму, вихід блока визначення фази струму джерела струму зв’язані з входами обчислювального блока визначення мінімуму коливань, входи блока визначення фази струму джерела змінного струму зв’язані з виходами датчиків напруги мережі та напруги джерела змінного струму.
Текст
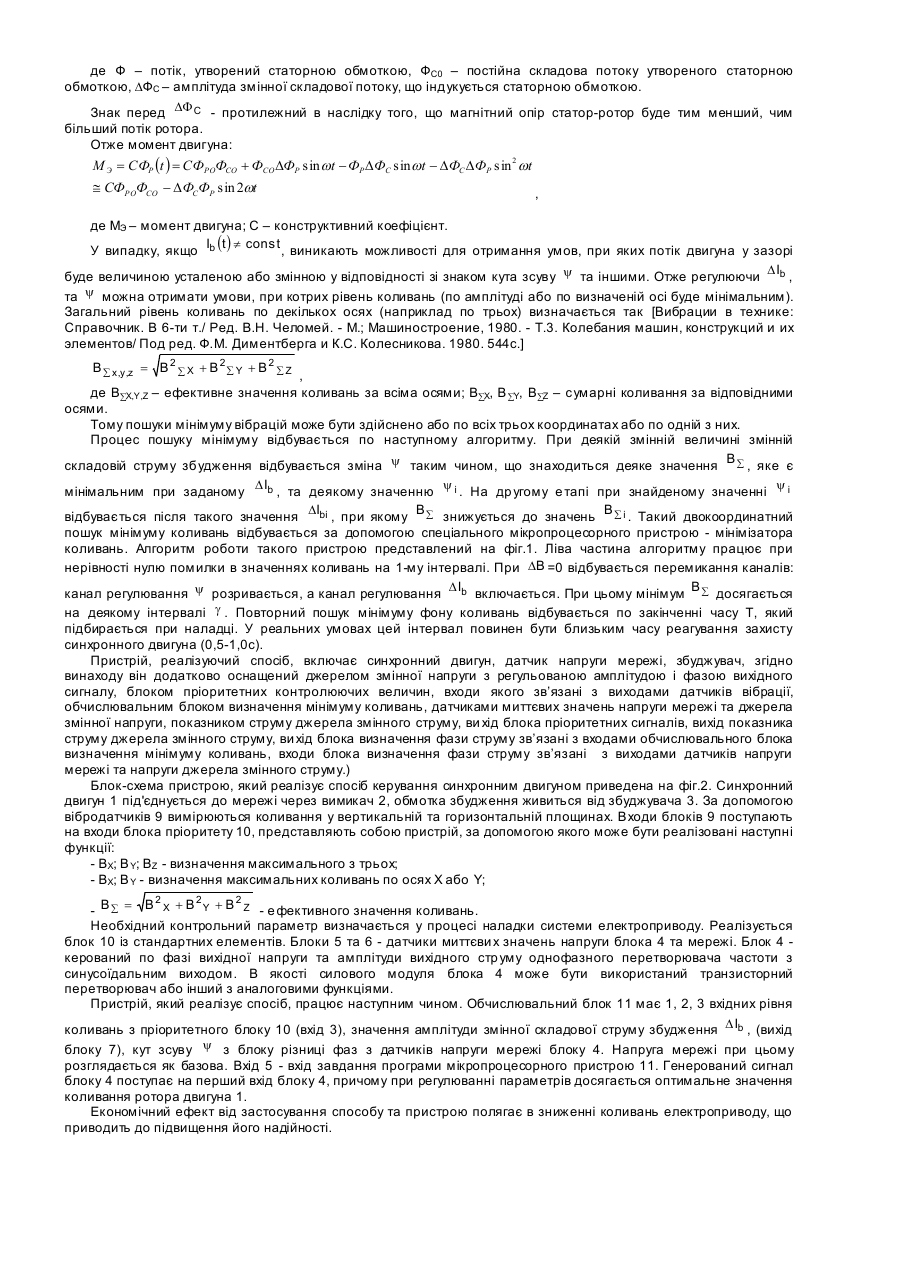
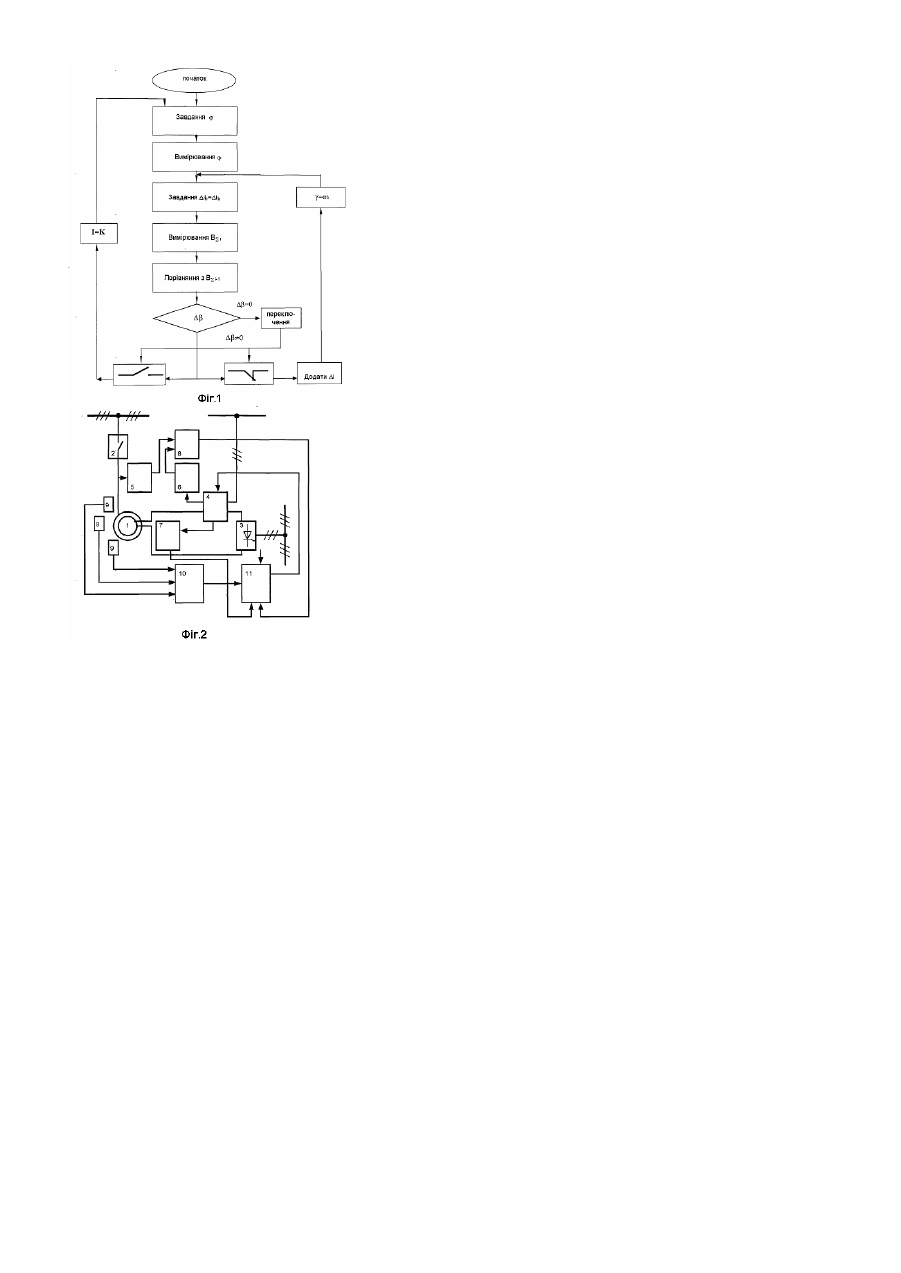
Спосіб управління синхронним двигуном відноситься до галузі електротехніки, а саме до управління синхронними двигунами з індуктивним збудженням, з незалежним зовнішнім збуджувачем. Звісно, що за часом електричні машини, в тому числі і синхронні, старіють, причому процес їх старіння часто супроводжується зростанням коливань ротора, та руйн уванням статора в одній або декількох площинах одночасно бо посилення коливань супроводжується інтенсивним руйнуванням ізоляції статорних обмоток. Найбільш вагомою складовою фону коливань синхронних двигунів є складова частоти 100Гц. Це відбувається тому, що магнітне поле у пазу є круговим обертовим, та має періодичну складову, наприклад, із-за нерівномірності зазору між статором та ротором (у верхньому положенні зазор більший, у нижньому менший) у зв'язку із поступовим руйнуванням підшипників під час експлуатації. Іноді це пов'язано із вигином валу ротора під дією сил тяжіння. Відомий спосіб зниження коливань [Вибрации энергетических машин. Справочное пособие. Под ред. д-ра техн. наук проф. Н.В. Григорьева, Л.: Машиностроение, (Ленингр. отд-ние), 1974. - 464с.]. Він полягає у тому, що у визначеному положенні ротора закріплюють дисбалансний вантаж, завдяки якому, фактично ми викликаємо допоміжні коливання, та ці фази повинні бути знесені на p відносно "власних" коливань (які були викликані тими або іншими дефектами). Вказаний процес багато ітераційний; встановлення дисбалансних вантажів відбувається після цілого ряду спроб і не приводить до радикального зниження вібрацій: після деякого часу коливання виникають знову. Відомий спосіб зниження коливань синхронного двигуна [К вопросу повышения ресурса работоспособности синхронных двигателей насосных агрегатов. Волощенко A.M., Родькин Д.И., Черный А.П./ в кн. Вісник Харківського державного політехнічного університету. Збірка наукових праць. Тематичний випуск №113. - Харків, ХДПУ, 2000. - 400с.]. Спосіб полягає у тому, що за допомогою збудника формують змінну складову напруги збудження таким чином, щоб зменшити коливання потужності синхронного двигуна, яка призводить до вібрацій. Недоліками наведеного способу є те, що - закон регулювання змінної складової не враховує активні опори обмоток двигуна які можуть істотно впливати на цей процес; - для завдання закону зміни змінної складової напруги збудження необхідно знати реактивні опори обмоток двигуна, які можуть змінюватися у процесі експлуатації; - закон керування не враховує ви щі гармоніки, які обумовлені механічним навантаженням. Наведений спосіб приймається в якості прототипу. Мета: підвищення швидкодії зниження коливань та вібрації синхронного двигуна без його зупинки під час виконання технологічного процесу. За допомогою збудника формують змінну складову напруги збудження таким чином, щоб зменшити коливання потужності синхронного двигуна, яка призводить до вібрацій. Відомий пристрій зниження коливань [Вибрации энергетических машин. Справочное пособие. Под ред. д-ра техн.наук проф. Н.В.Григорьева, Л.: Машиностроение, (Ленингр. отд-ние), 1974. - 464с]. Він полягає у тому, що: синхронний двигун під'єднаний до мережі через автоматичний вимикач, обмотка збудження двигуна під'єднана до збудника, у визначеному положенні встановлюється дисбалансний вантаж. Недоліком є те, що встановлення дисбалансних вантажів відбувається після цілого ряду спроб і не приводить до радикального зниження вібрацій: після деякого часу коливання виникають знову. Відомий пристрій зниження коливань синхронного двигуна [К вопросу повышения ресурса работоспособности синхронных двигателей насосных агрегатов. Волощенко A.M., Родькин Д.И., Черный АЛ./ в кн. Вісник Харківського державного політехнічного університету. Збірка наукових праць. Тематичний випуск №113. - Харків, ХДПУ, 2000. - 400а]. Він полягає у тому, що син хронний двигун під'єднаний до мережі через блок датчиків напруги та система збудження виконана з регулятором струму збудження. Недоліки пристрою: - пристрій потребує завдання параметрів двигуна (активних та реактивних опорів) для кожного двигуна окремо, що потребує переналагодження регулятора струму зб удження. Наведений пристрій приймається в якості прототипу. Запропонований спосіб управління синхронним двигуном полягає в підключенні двигуна до промислової мережі, поданні на ротор напруги збудження, що містить постійну та змінну складові, згідно винаходу, в мережу збудження вводять складову струм у з частотою 50Гц регульованої амплітуди та фази по відношенню до напруги в мережі, задають амплітуду змінної складової струму збудження та здійснюють зміну кута зсуву фази змінної складової, контролюючи величину коливань, при досягненні мінімуму величини коливань, починають змінювати амплітуду змінної складової струму до досягнення мінімуму коливань, процес повторюють через заданий технологічними умовами інтервал часу. Завдяки джерелу змінної напруги з частотою 50Гц, регульованої амплітуди і фази, стр ум збудження окрім постійної складової має і періодичну складову: Ib (t ) = Ib 0 + D Ib × sin (wt + y ) = Ub 0 Ub » + sin (wt + y ) Rb Zb де Ib(t) – струм збудження; Ib0 – постійна складова струму збудження, DІb – амплітуда змінної складової струму збудження; w - кутова частота; t – час; Ub0 – постійна складова напруги збудження;Ub» - амплітуда змінної складової напруги збудження; Rb – активний опір обмотки збудження; Zb повний опір обмотки збудження. В режимі еквівалентному тим розв'язкам які маємо на практиці зараз, при постійному струмі збудження, потік, що індукується обмоткою збудження F P » F PO + DF P * sinwt , де Фр – потік, що індукується обмоткою збудження; Фро – постійна складова потоку, що індук ується обмоткою збудження; DФр – амплітуда змінної складової потоку, що індук ується обмоткою збудження. Змінна складова потоку викликана нерівномірністю зазору. Потік, утворений статорною обмоткою: F » F C0 - DF C * sinwt , де Ф – потік, утворений статорною обмоткою, ФС0 – постійна складова потоку утвореного статорною обмоткою, DФС – амплітуда змінної складової потоку, що індукується статорною обмоткою. Знак перед DF C - протилежний в наслідку того, що магнітний опір статор-ротор буде тим менший, чим більший потік ротора. Отже момент двигуна: М Э = СФР (t ) = CФРОФСО + ФСО DФР sin wt - ФРDФС sin wt - DФС DФР sin 2 wt @ CФРОФСО - DФСФР sin 2wt , де МЭ – момент двигуна; С – конструктивний коефіцієнт. У випадку, якщо Ib (t ) ¹ const , виникають можливості для отримання умов, при яких потік двигуна у зазорі буде величиною усталеною або змінною у відповідності зі знаком кута зсуву y та іншими. Отже регулюючи D Ib , та y можна отримати умови, при котрих рівень коливань (по амплітуді або по визначеній осі буде мінімальним). Загальний рівень коливань по декількох осях (наприклад по трьох) визначається так [Вибрации в технике: Справочник. В 6-ти т./ Ред. В.Н. Челомей. - М.; Машиностроение, 1980. - Т.3. Колебания машин, конструкций и их элементов/ Под ред. Ф.М. Диментберга и К.С. Колесникова. 1980. 544с.] B å x,y,z = B 2 å X + B 2 å Y + B 2 å Z , де ВåX,Y,Z – ефективне значення коливань за всіма осями; ВåX, В åY, ВåZ – сумарні коливання за відповідними осями. Тому пошуки мінімуму вібрацій може бути здійснено або по всіх трьох координатах або по одній з них. Процес пошуку мінімуму відбувається по наступному алгоритму. При деякій змінній величині змінній складовій струму збудження відбувається зміна y таким чином, що знаходиться деяке значення B å , яке є мінімальним при заданому D Ib , та деякому значенню y i . На др угому е тапі при знайденому значенні y i відбувається після такого значення DIbi , при якому B å знижується до значень B å i . Такий двокоординатний пошук мінімуму коливань відбувається за допомогою спеціального мікропроцесорного пристрою - мінімізатора коливань. Алгоритм роботи такого пристрою представлений на фіг.1. Ліва частина алгоритму працює при нерівності нулю помилки в значеннях коливань на 1-му інтервалі. При DB =0 відбувається перемикання каналів: канал регулювання y розривається, а канал регулювання D Ib включається. При цьому мінімум B å досягається на деякому інтервалі g . Повторний пошук мінімуму фону коливань відбувається по закінченні часу Т, який підбирається при наладці. У реальних умовах цей інтервал повинен бути близьким часу реагування захисту синхронного двигуна (0,5-1,0с). Пристрій, реалізуючий спосіб, включає синхронний двигун, датчик напруги мережі, збуджувач, згідно винаходу він додатково оснащений джерелом змінної напруги з регульованою амплітудою і фазою вихідного сигналу, блоком пріоритетних контролюючих величин, входи якого зв’язані з виходами датчиків вібрації, обчислювальним блоком визначення мінімуму коливань, датчиками миттєвих значень напруги мережі та джерела змінної напруги, показником струму джерела змінного струму, ви хід блока пріоритетних сигналів, вихід показника струму джерела змінного струму, ви хід блока визначення фази струму зв’язані з входами обчислювального блока визначення мінімуму коливань, входи блока визначення фази струму зв’язані з виходами датчиків напруги мережі та напруги джерела змінного струму.) Блок-схема пристрою, який реалізує спосіб керування синхронним двигуном приведена на фіг.2. Синхронний двигун 1 під'єднується до мережі через вимикач 2, обмотка збудження живиться від збуджувача 3. За допомогою вібродатчиків 9 вимірюються коливання у вертикальній та горизонтальній площинах. Входи блоків 9 поступають на входи блока пріоритету 10, представляють собою пристрій, за допомогою якого може бути реалізовані наступні функції: - ВX; B Y; ВZ - визначення максимального з трьох; - ВX; B Y - визначення максимальних коливань по осях Х aбo Y; 2 2 2 - B å = B X + B Y + B Z - е фективного значення коливань. Необхідний контрольний параметр визначається у процесі наладки системи електроприводу. Реалізується блок 10 із стандартних елементів. Блоки 5 та 6 - датчики миттєви х значень напруги блока 4 та мережі. Блок 4 керований по фазі вихідної напруги та амплітуди вихідного стр уму однофазного перетворювача частоти з синусоїдальним виходом. В якості силового модуля блока 4 може бути використаний транзисторний перетворювач або інший з аналоговими функціями. Пристрій, який реалізує спосіб, працює наступним чином. Обчислювальний блок 11 має 1, 2, 3 вхідних рівня коливань з пріоритетного блоку 10 (вхід 3), значення амплітуди змінної складової струму збудження D Ib , (вихід блоку 7), кут зсуву y з блоку різниці фаз з датчиків напруги мережі блоку 4. Напруга мережі при цьому розглядається як базова. Вхід 5 - вхід завдання програми мікропроцесорного пристрою 11. Генерований сигнал блоку 4 поступає на перший вхід блоку 4, причому при регулюванні параметрів досягається оптимальне значення коливання ротора двигуна 1. Економічний ефект від застосування способу та пристрою полягає в зниженні коливань електроприводу, що приводить до підвищення його надійності.
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for controlling a synchronous motor and the device for the realization of the method
Автори англійськоюRodkin Dmytro Yosypovych, Chornyi Oleksii Petrovych, Morozov Oldeksandr Oleksandrovych
Назва патенту російськоюСпособ управления синхронным электродвигателем и устройство для осуществления способа
Автори російськоюРодькин Дмитрий Иосифович, Черный Алексей Петрович, Морозов Александр Александрович
МПК / Мітки
МПК: G01R 31/34
Мітки: сінхронним, управління, спосіб, реалізації, двигуном, пристрій
Код посилання
<a href="https://ua.patents.su/3-64084-sposib-upravlinnya-sinkhronnim-dvigunom-ta-pristrijj-dlya-jjogo-realizaci.html" target="_blank" rel="follow" title="База патентів України">Спосіб управління синхронним двигуном та пристрій для його реалізації</a>
Спосіб керування асинхронним двигуном та пристрій для його реалізації
Номер патенту: 62097
Опубліковано: 15.12.2003
Автори: Чорний Олексій Петрович, Сичов Сергій Дмитрович, Родькін Дмитро Йосипович
МПК: G01R 31/34
Мітки: спосіб, керування, реалізації, асинхронним, пристрій, двигуном
Формула / Реферат:
1. Спосіб керування асинхронним двигуном, що включає підключення асинхронного двигуна через перетворювач напруги до джерела промислової частоти, вимірювання миттєвих значень напруги та струму статорного ланцюга та розрахунок моменту двигуна, який відрізняється тим, що за даними вимірів розраховують миттєву потужність та момент двигуна, вилучають змінну складову моменту та подають на регулятор системи імпульсно-фазового керування тиристорним...
Спосіб частотно-струмового управління двофазним синхронним двигуном
Номер патенту: 9831
Опубліковано: 30.09.1996
Автори: Ярославцев Михайло Іванович, Павлов Євген Федорович
МПК: H02P 27/04
Мітки: двофазним, управління, частотно-струмового, двигуном, спосіб, сінхронним
Формула / Реферат:
(57) Способ частотно-токового управления двухфазным синхронным двигателем, при котором фазные обмотки двигателя запиты-вают синусоидальным и косинусоидальным токами равной амплитуды, регулируя амплитуду которых, управляют моментом, отличающийся тем, что предварительно определяют угловую погрешность взаимной установки фазных секций двигателя и фазные обмотки запитывают указанными токами, сдвинутыми по фазе на угол, равный указанной...
Пристрій для управління двигуном зворотно-поступального руху
Номер патенту: 34276
Опубліковано: 15.02.2001
Автори: Савчук Микола Миколайович, Шибицька Наталія Миколаївна, Шибицький Вячеслав Петрович
МПК: H02P 25/16
Мітки: руху, пристрій, двигуном, управління, зворотно-поступального
Текст:
...гашення електромагнітного поля двигуна 10 і рекуперацію не перетвореної енергії в конденсатор 14. В момент часу t6 струм обмотки збудження 13 стає рівним нулю, процес рекуперації закінчується, після чого за час t6...t7 конденсатор перезаряджається струмом, що змінюється по закону, який описує крива 24, по 2 34276 обмотку збудження 9 (13) двигуна зворотнопоступального руху, яке описується кривою 28 зміни напруги на конденсаторі,...
Спосіб визначення параметрів системи управління з двигуном постійного струму та пристрій для його здійснення
Номер патенту: 20167
Опубліковано: 25.12.1997
Автор: Аркадьєв Віктор Юрьєвич
МПК: G06G 7/00, G01R 31/34, H02K 15/00
Мітки: визначення, параметрів, пристрій, спосіб, здійснення, струму, двигуном, постійного, системі, управління
Формула / Реферат:
1. Способ определения параметров систем управления с двигателем постоянного тока, включающий измерение тока і и напряжения U якоря двигателя, скачкообразное изменение задающего воздействия от блока задающих сигналов, отличающийся тем, что используют активно-индуктивную (RL) нагрузку, а действие внутренней связи по электродвижущей силе (ЭДС) двигателя постоянного тока реализуют на основе преобразования контура регулирования тока и с помощью...
Спосіб управління насосною станцією та пристрій для його реалізації
Номер патенту: 62490
Опубліковано: 15.12.2003
Автори: Коренькова Тетяна Валеріївна, Перекрест Андрій Леонідович, Родькін Дмитро Йосипович, Костюк Сергій Миколайович, Живора Валерій Федорович
МПК: F04D 27/00, H02P 5/74
Мітки: реалізації, станцією, спосіб, пристрій, насосною, управління
Формула / Реферат:
1. Спосіб управління насосною станцією, яка включає перший і другий насосні агрегати з електроприводом і засувками на вході та на подачі, що полягає в контролі параметрів насосних агрегатів, регулюванні їхньої продуктивності та тиску за заданим параметром шляхом впливу на швидкість обертання насосних агрегатів, який відрізняється тим, що другий насосний агрегат, обладнаний насосом-турбіною з регульованим електроприводом, включається в...
Попередній патент: Спосіб моніторингу асинхронних двигунів і пристрій для його здійснення
Наступний патент: Спосіб діагностики хронічного панкреатиту
Випадковий патент: П'єзоелектричний акселерометр