Спосіб частотно-струмового управління двофазним синхронним двигуном
Номер патенту: 9831
Опубліковано: 30.09.1996
Формула / Реферат
(57) Способ частотно-токового управления двухфазным синхронным двигателем, при котором фазные обмотки двигателя запиты-вают синусоидальным и косинусоидальным токами равной амплитуды, регулируя амплитуду которых, управляют моментом, отличающийся тем, что предварительно определяют угловую погрешность взаимной установки фазных секций двигателя и фазные обмотки запитывают указанными токами, сдвинутыми по фазе на угол, равный указанной погрешности с противоположным знаком.
Текст
Способ частотно-токового управления двухфазным синхронным двигателем, при котором фазные обмотки двигателя запитывают синусоидальным и косинусоидальным токами равной амплитуды, регулируя амплитуду которых, управляют моментом, о т л и ч а ю щ и й с я тем, что предварительно определяют угловую погрешность взаимной установки фазных секций двигателя и фазные обмотки запитывают указанными токами, сдвинутыми по фазе на угол, равный указанной погрешности с противоположным знаком. Изобретение относится к электротехнике, а именно к электроприводам переменного тока с частотно-токовым управлением, и может быть использовано для управления линейными синхронными индукторными двигателями. Известен способ частотного управления синхронным двигателем [1], который позволяет с высокой точностью регулировать скорость вращения ротора двигателя. Недостатком известного способа являются трудности создания быстродействующего прецизионного электропривода на базе синхронного двигателя. Это объясняется склонностью к качаниям ротора двигателя, которая особенно отрицательно проявляется при нестационарной нагрузке на валу двигателя. Наиболее близким по технической сущности является способ частотно-токового управления двухфазным синхронным двига телем, при котором фазные обмотки синхронного двигателя запитывают синусоидальным и косинусоидальным токами равной амплитуды и, регулируя амплитуду которых, управляют моментов вращения синхронного двигателя [2]. Недостатком известного способа является невысокая точность управления моментов вращения, обусловленная пульсациями момента, вызванными погрешностью установки фазных секций двигателя друг относительно друга. Задачей изобретения является повышение точности управления моментом вращения, путем исключения пульсаций момента. Постзвленная задача решается тем, что в способе частотно-токового управления двухфазным синхронным двигателем, при котором фазные обмотки синхронного двигателя запитывают синусоидальным и косинусоидальным токами равной амплитуды и, оо со О 9831 регулируя амплитуду которых, управляют моментом вращения, согласно изобретению, предварительно определяют угловую погрешность взаимной установки фазных секций двигателя и фазные обмотки запиты- 5 вают указанными токами, сдвинутыми по фазе на угол, равный указанной погрешности с противоположным знаком. На чертеже представлена схема электропривода переменного тока по базе линей- 10 ного синхронного индукторного двигателя, Управление силой тяги линейного двигателя осуществляется в соответствии с предлагаемым способом. Электропривод содержит линейный 15 двигатель 1, линейный датчик 2 положения, подвижный элемент которого жестко соединен с подвижным элементом линейного двигателя 1, формирователь 3 фазных токов линейного двигателя, первый управляющий 20 вход которого подключен к за датчику 4 силы тяги, второй управляющий вход - к выходу линейного датчика 2 положения, а то коза дающие выходы - к фазным обмоткам линей: ного двигателя 1, источник 5 25 синусоидальных напряжений, первый выход которого подключен к опорному входу линейного датчика 2 положения и к первому опорному входу формирователя 3 фазных токов, а второй выход - через фазосмещаю- 30 щий блок 6 к второму опорному входу формирователя 3 фазных токов. Формирователь 3 фазных токов линейного двигателя содержит первый и второй блоки 7, 8 умножения, формирователь 9 35 опорных сигналов, первый и второй фазочувствительные выпрямители 10, 11, управляющие входы которых подключены к выходам блоков 7, 8 умножения, а опорные входы - к выходу формирователя 9 опорных 40 сигналов, первый и второй регулируемые источники 12,13 тока, подключенные входами к выходам фазочувствительных выпрямителей 10, 11. При этом первым управляющим входом 45 формирователя 3 является первый вход блока 7 умножения, объединенный с первым входом блока 8 умножения, вторым управляющим входом - вход формирователя 9 опорных сигналов, первым и вторым опор- 50 ными входами - вторые входы блоков 7, 8 умножения, токозадающими выходами - выходы регулируемых источников 12, 13 тока. Линейный двигатель 1 содержит ферромагнитный зубчатый статор 14 и подвижный 55 элемент 15, состоящий из фазных электромагнитных модулей 16, 17. Каждый электромагнитный модуль включает в себя Побразные магнитопроводы 18, 19, обмотку 20 управления и постоянный магнит 21 возбуждения. Зубцовая зона линейного двигателя 1 выполнена с шагом г. Устройство реализующее способ работает следующим образом. 1. Предварительно, на этапе наладки привода, определяют угловую погрешность взаимной установки фазных секций двига теля друг относительно друга. 2. Фазные обмотки двигателя запитывают синусоидальными и косинусоидальными токами равной амплитуды. 3. Указанные токи дополнительно сдви гают по фазе на угол, равный указанной погрешности с противоположным знаком. 4. Управляют моментом вращения дви гателя путем регулирования амплитуды то ков. Пусть электромагнитные модули 16 и 17 взаимно смещены с некоторой инструментальной погрешностью, т.е. электромагнитные модули установлены друг относительно друга вдоль направления движения на длину ХАВ где г- шаг зубцовой зоны двигателя, д инструментальная погрешность, п - любое целое число. Согласно частотно-токовому способу управления синхронной машиной [2] линейный двигатель 1 будет развивать силу тяги F- C(I A sin (1) 2л 2л где — • б - угловая погрешность взаимной установки фазных электромагнитных модулей 16 и 17, Х-текущее положение подвижного элемента 15 вдоль направления движения, ІА и їв - фазные токи, С - коэффициент пропорциональности. В соответствии с предлагаемым способом обмотки 20 управления электромагнитных модулей 16 и 17 должны эапитываться фазными токами ІА - lo sin
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for two-phase synchronous motor frequency-current control
Автори англійськоюYaroslavtsev Mykhailo Ivanovych, Pavlov Yevhen Fedorovych
Назва патенту російськоюСпособ частотно-токового управления двухфазным синхронным двигателем
Автори російськоюЯрославцев Михаил Иванович, Павлов Евгений Федорович
МПК / Мітки
МПК: H02P 27/04
Мітки: управління, спосіб, двофазним, частотно-струмового, двигуном, сінхронним
Код посилання
<a href="https://ua.patents.su/4-9831-sposib-chastotno-strumovogo-upravlinnya-dvofaznim-sinkhronnim-dvigunom.html" target="_blank" rel="follow" title="База патентів України">Спосіб частотно-струмового управління двофазним синхронним двигуном</a>
Пристрій для управління трифазним двигуном змінного струму
Номер патенту: 3042
Опубліковано: 26.12.1994
Автор: Ярославцев Михайло Іванович
МПК: H02P 27/02
Мітки: струму, трифазним, змінного, управління, двигуном, пристрій
Формула / Реферат:
1. Устройство для управления трехфазным двигателем переменного, тока с соединенными в звезду фазными обмотками, содержащее трехфазный мостовой инвертор с силовыми входами и выходами, предназначенными соответственно для подключения к источнику напряжения и фазным обмоткам статора электродвигателя, измерители токов двух первых фаз, задатчики фазных токов, регуляторы фазных токов, подключенные первыми входами к выходам задатчиков фазных токов,...
Пристрій для формування опорних сигналів управління сінхронним двигуном
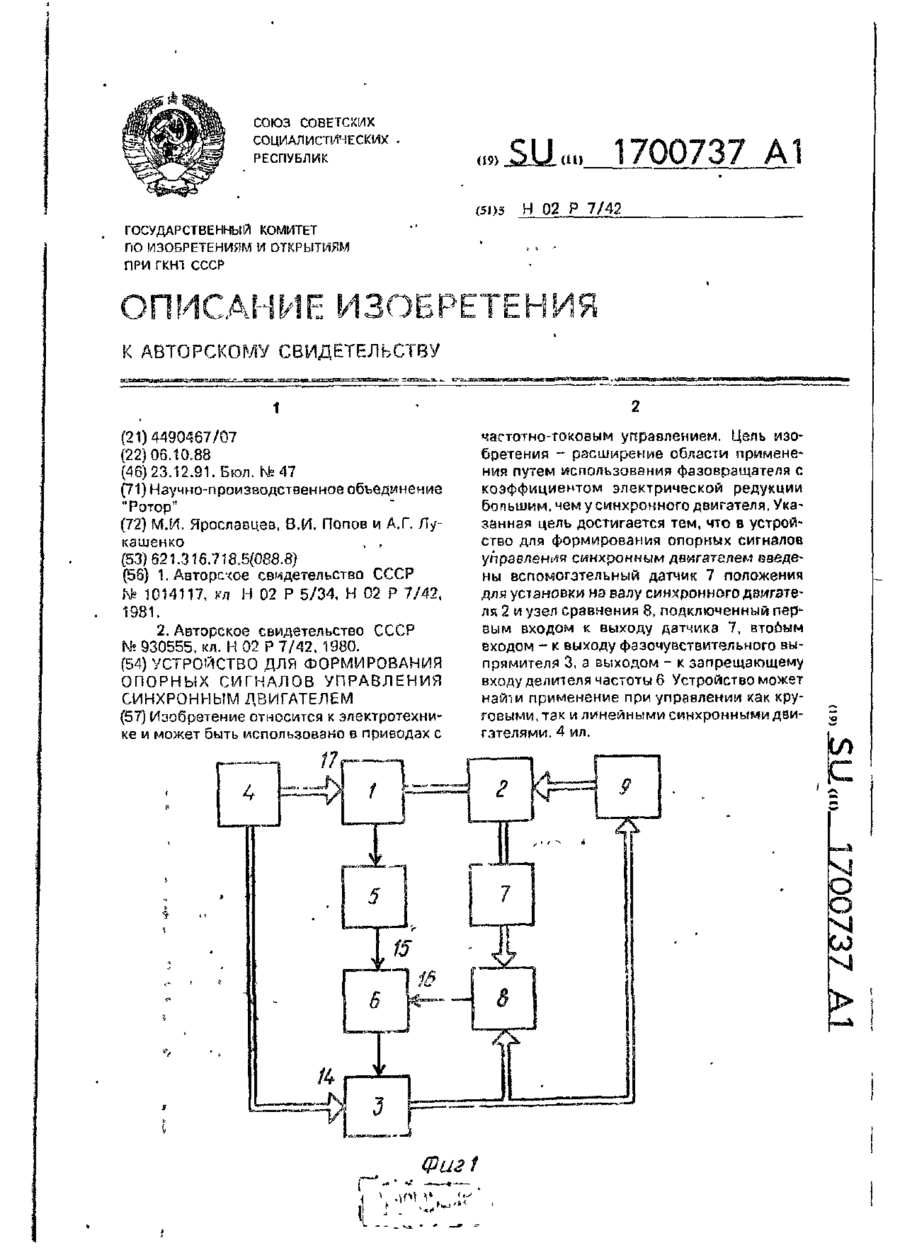
Номер патенту: 4491
Опубліковано: 27.12.1994
Автори: Лукашенко Андрій Германович, Ярославцев Михайло Іванович, Попов Віктор Іванович
МПК: H02P 27/04
Мітки: формування, сінхронним, двигуном, опорних, пристрій, управління, сигналів
Формула / Реферат:
Устройство для формирования опорных сигналов управления синхронным двигателем, содержащее фазовращатель, ротор которого предназначен для механического соединения с ротором синхронного двигателя, фазочувствительный выпрямитель, выход которого образует выход названного устройства, задающий генератор, первый выход которого подключен к входу фазовращателя, а второй - к первому входу фазочувствительного выпрямителя, формирователь коротких...
Елекропривід з частотно-струмовим управлінням
Номер патенту: 2925
Опубліковано: 26.12.1994
Автор: Ярославцев Михайло Іванович
МПК: H02P 27/04
Мітки: елекропривід, управлінням, частотно-струмовим
Формула / Реферат:
Электропривод с частотно-токовым управлением, содержащий синхронный двигатель, фазовращатель, ротор которого механически соединен с ротором двигателя, фазочувствительный выпрямитель, связанный выходом через усилитель фазных токов с фазными обмотками синхронного двигателя, генератор синусоидальных напряжений, выходом подключенный к входным обмоткам фазовращателя, управляемый фазосмещающий блок, подключенный сигнальным входом к выходу...
Спосіб частотного керування асинхронним двигуном
Номер патенту: 2944
Опубліковано: 26.12.1994
Автор: Ярославцев Михайло Іванович
МПК: H02P 27/04
Мітки: частотного, двигуном, асинхронним, спосіб, керування
Формула / Реферат:
Способ частотного управления асинхронным двигателем, при котором регулируют частоту и величину напряжения питания асинхронного двигателя путем широтно-импульсного модулирования постоянного напряжения питания инвертора, обеспечивая закон регулирования U=Uo+Kf, отличающийся тем, что широтно-импульсное модулирование осуществляют путем дополнительного регулирования длительности импульсов в каждой полуволне напряжения питания по следующему...
Електропривід з частотно-струмовим керуванням
Номер патенту: 2945
Опубліковано: 26.12.1994
Автори: Ярославцев Михайло Іванович, Лукашенко Андрій Германович
МПК: H02P 27/04
Мітки: частотно-струмовим, керуванням, електропривід
Формула / Реферат:
Электропривод с частотно-токовым управлением, содержащий синхронный двигатель, фазовращатель, ротор которого механически соединен с ротором двигателя, цепь возбуждения фазовращателя подключена к выходу источника синусоидальных напряжений, последовательно соединенные фазовый детектор с управляющим первым и вторым опорными входами и регулируемый источник тока, выходы которого подключены к фазным обмоткам двигателя, формирователь коротких...
Попередній патент: Лінійний двофазний індукторний двигун
Наступний патент: Датчик струму навантаження мостового інвертора
Випадковий патент: Ланка проміжна