Спосіб визначення параметрів системи управління з двигуном постійного струму та пристрій для його здійснення

Формула / Реферат
1. Способ определения параметров систем управления с двигателем постоянного тока, включающий измерение тока і и напряжения U якоря двигателя, скачкообразное изменение задающего воздействия от блока задающих сигналов, отличающийся тем, что используют активно-индуктивную (RL) нагрузку, а действие внутренней связи по электродвижущей силе (ЭДС) двигателя постоянного тока реализуют на основе преобразования контура регулирования тока и с помощью организации или обратной связи по сигналу ЭДС преобразователя, или обратной связи по сигналу расчетной скорости двигателя постоянного тока.
2. Устройство для определения параметров систем управления с двигателем постоянного тока, содержащее датчик тока и датчик напряжения, подключаемые к якорю двигателя, и первый и второй универсальные фильтры, входы которых соединены соответственно с выходами датчиков тока и напряжения, отличающееся тем, что оно содержит блок задающих сигналов, выход которого соединен с первым входом регулятора скорости, второй вход которого соединен с выходом блока внутренней связи по ЭДС двигателя, выход регулятора скорости подключен к первому входу регулятора тока, выход регулятора тока соединен с входом тиристорного преобразователя, силовая цепь которого подключена к вторичным обмоткам трансформатора и к датчику тока, нулевой вывод и первичные обмотки трансформатора соединены соответственно с активно-индуктивным сопротивлением, которая подключена к датчику тока, и источником питания, выход датчика тока соединен с вторым входом регулятора тока и входом расчетной части механической связи, выход которой подключен к третьему входу регулятора скорости и входу блока внутренней связи по ЭДС двигателя.
Текст
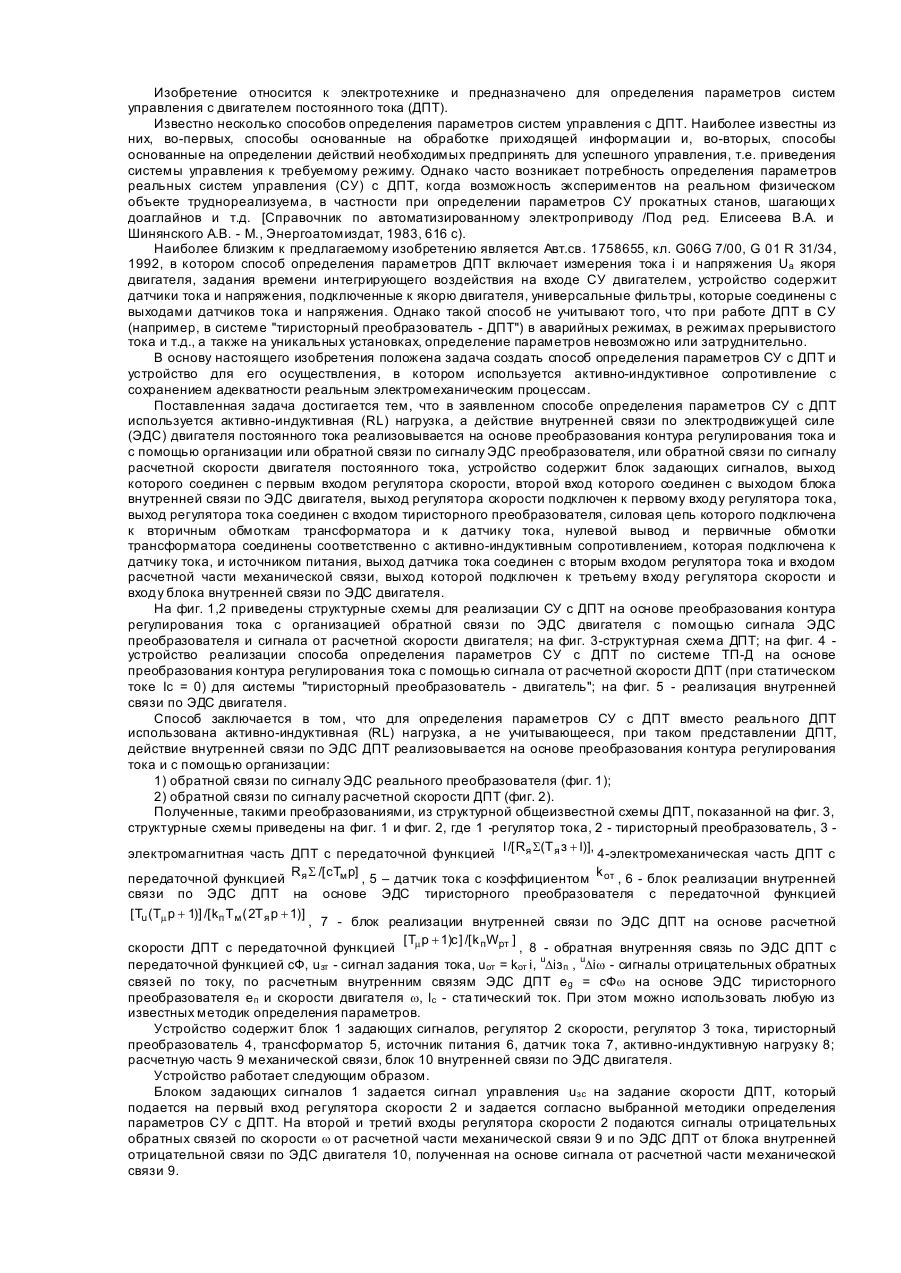
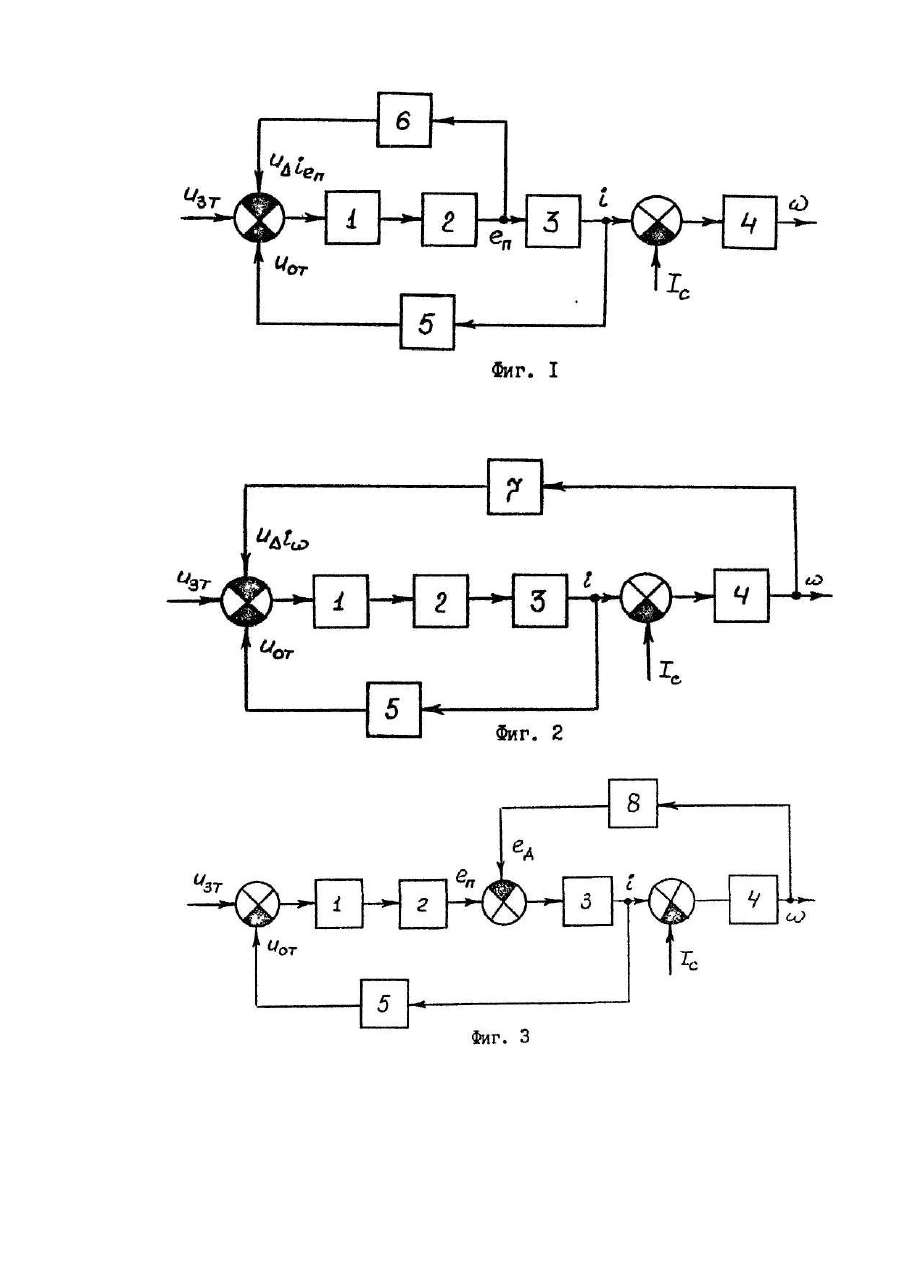
Изобретение относится к электротехнике и предназначено для определения параметров систем управления с двигателем постоянного тока (ДПТ). Известно несколько способов определения параметров систем управления с ДПТ. Наиболее известны из них, во-первых, способы основанные на обработке приходящей информации и, во-вторых, способы основанные на определении действий необходимых предпринять для успешного управления, т.е. приведения системы управления к требуемому режиму. Однако часто возникает потребность определения параметров реальных систем управления (СУ) с ДПТ, когда возможность экспериментов на реальном физическом объекте труднореализуема, в частности при определении параметров СУ прокатных станов, шагающи х доаглайнов и т.д. [Справочник по автоматизированному электроприводу /Под ред. Елисеева В.А. и Шинянского А.В. - М., Энергоатомиздат, 1983, 616 с). Наиболее близким к предлагаемому изобретению является Авт.св. 1758655, кл. G06G 7/00, G 01 R 31/34, 1992, в котором способ определения параметров ДПТ включает измерения тока і и напряжения Ua якоря двигателя, задания времени интегрирующего воздействия на входе СУ двигателем, устройство содержит датчики тока и напряжения, подключенные к якорю двигателя, универсальные фильтры, которые соединены с выходами датчиков тока и напряжения. Однако такой способ не учитывают того, что при работе ДПТ в СУ (например, в системе "тиристорный преобразователь - ДПТ") в аварийных режимах, в режимах прерывистого тока и т.д., а также на уникальных установках, определение параметров невозможно или затруднительно. В основу настоящего изобретения положена задача создать способ определения параметров СУ с ДПТ и устройство для его осуществления, в котором используется активно-индуктивное сопротивление с сохранением адекватности реальным электромеханическим процессам. Поставленная задача достигается тем, что в заявленном способе определения параметров СУ с ДПТ используется активно-индуктивная (RL) нагрузка, а действие внутренней связи по электродвижущей силе (ЭДС) двигателя постоянного тока реализовывается на основе преобразования контура регулирования тока и с помощью организации или обратной связи по сигналу ЭДС преобразователя, или обратной связи по сигналу расчетной скорости двигателя постоянного тока, устройство содержит блок задающих сигналов, выход которого соединен с первым входом регулятора скорости, второй вход которого соединен с выходом блока внутренней связи по ЭДС двигателя, выход регулятора скорости подключен к первому входу регулятора тока, выход регулятора тока соединен с входом тиристорного преобразователя, силовая цепь которого подключена к вторичным обмоткам трансформатора и к датчику тока, нулевой вывод и первичные обмотки трансформатора соединены соответственно с активно-индуктивным сопротивлением, которая подключена к датчику тока, и источником питания, выход датчика тока соединен с вторым входом регулятора тока и входом расчетной части механической связи, выход которой подключен к третьему входу регулятора скорости и входу блока внутренней связи по ЭДС двигателя. На фиг. 1,2 приведены структурные схемы для реализации СУ с ДПТ на основе преобразования контура регулирования тока с организацией обратной связи по ЭДС двигателя с помощью сигнала ЭДС преобразователя и сигнала от расчетной скорости двигателя; на фиг. 3-структурная схема ДПТ; на фиг. 4 устройство реализации способа определения параметров СУ с ДПТ по системе ТП-Д на основе преобразования контура регулирования тока с помощью сигнала от расчетной скорости ДПТ (при статическом токе Іс = 0) для системы "тиристорный преобразователь - двигатель"; на фиг. 5 - реализация внутренней связи по ЭДС двигателя. Способ заключается в том, что для определения параметров СУ с ДПТ вместо реального ДПТ использована активно-индуктивная (RL) нагрузка, а не учитывающееся, при таком представлении ДПТ, действие внутренней связи по ЭДС ДПТ реализовывается на основе преобразования контура регулирования тока и с помощью организации: 1) обратной связи по сигналу ЭДС реального преобразователя (фиг. 1); 2) обратной связи по сигналу расчетной скорости ДПТ (фиг. 2). Полученные, такими преобразованиями, из структурной общеизвестной схемы ДПТ, показанной на фиг. 3, структурные схемы приведены на фиг. 1 и фиг. 2, где 1 -регулятор тока, 2 - тиристорный преобразователь, 3 электромагнитная часть ДПТ с передаточной функцией l /[ Rя S(Т я з + І)], 4-электромеханическая часть ДПТ с передаточной функцией Rя S /[ cTм р] , 5 – датчик тока с коэффициентом k oт , 6 - блок реализации внутренней связи по ЭДС ДПТ на основе ЭДС тиристорного преобразователя с передаточной функцией [ Tu (Tm p + 1)] /[ kп Т м ( 2Т я р + 1)] , 7 - блок реализации внутренней связи по ЭДС ДПТ на основе расчетной [ T p + 1)c ] /[ k пWрт ] скорости ДПТ с передаточной функцией m , 8 - обратная внутренняя связь по ЭДС ДПТ с передаточной функцией сФ, uзт - сигнал задания тока, uот = kот i, uDiз п , uDiw - сигналы отрицательных обратных связей по току, по расчетным внутренним связям ЭДС ДПТ е g = сФw на основе ЭДС тиристорного преобразователя еп и скорости двигателя w, lc - ста тический ток. При этом можно использовать любую из известных методик определения параметров. Устройство содержит блок 1 задающих сигналов, регулятор 2 скорости, регулятор 3 тока, тиристорный преобразователь 4, трансформатор 5, источник питания 6, датчик тока 7, активно-индуктивную нагрузку 8; расчетную часть 9 механической связи, блок 10 внутренней связи по ЭДС двигателя. Устройство работает следующим образом. Блоком задающих сигналов 1 задается сигнал управления uзс на задание скорости ДПТ, который подается на первый вход регулятора скорости 2 и задается согласно выбранной методики определения параметров СУ с ДПТ. На второй и третий входы регулятора скорости 2 подаются сигналы отрицательных обратных связей по скорости w от расчетной части механической связи 9 и по ЭДС ДПТ от блока внутренней отрицательной связи по ЭДС двигателя 10, полученная на основе сигнала от расчетной части механической связи 9. Сигналом задания на ток двигателя, сигнал который подается на первый вход регулятора тока 3, является выходной сигнал регулятора скорости 2. Выход регулятора тока 3 соединен с входом реального тиристорного преобразователя 4, который подключен к трансформатору 5, и служит сигналом для задания на ток ДПТ. Трансформатор 5 подключен к источнику питания 6 и через датчик тока 7 к активно-индуктивной нагрузки 8, т.е., другими слова, тиристорный преобразователь и активно-индуктивная нагрузка включены по нулевой схеме. Сигнал от датчика тока 7 подается на второй вход регулятора тока 3 и вход расчетной части механической связи 9. В данном устройстве реализован способ с отрицательной обратной связью по сигналу расчетной скорости ДПТ. В этом случае, при условии представления регулятора тока в виде передаточной функции инерционного звена, реализация передаточной функции блока внутренней связи по ЭДС двигателя, осуществляется, как показано на фиг. 5, ввиде трех усилителей, расчет параметров которых общеизвестен. На первом усилителе реализована передаточная функция Wрт , на втором - передаточная функция (Τ mр+1)с, на третьем - коэффициент усиления тиристорного преобразователя kп. Таким образом, предлагаемый способ позволяет определять параметры СУ с ДПТ, при котором используется реальная СУ, а ДПТ заменяется активно-индуктивным сопротивлением при сохранении адекватности реальным электромеханическим процессам, при работе ДПТ в СУ (например, в системе "тиристорный преобразователь -ДПТ") в аварийных режимах, в режимах прерывистого тока и т.д., а также на уникальных установках, определение параметров невозможно или затруднительно. Предлагаемое устройство показывает реализацию способа с отрицательной обратной связью по сигналу расчетной скорости ДПТ, на примере системы "тиристорный преобразователь -ДПТ" с управлением скоростью и тока ДПТ.
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for determination of dc motor-control system parameters and unit for its realization
Автори англійськоюArkad'iev Viktor Yuriiovych
Назва патенту російськоюСпособ определения параметров системы управления двигателем постоянного тока и устройство для его осуществления
Автори російськоюАркадьев Виктор Юрьевич
МПК / Мітки
МПК: G06G 7/00, H02K 15/00, G01R 31/34
Мітки: струму, визначення, системі, постійного, пристрій, здійснення, двигуном, управління, параметрів, спосіб
Код посилання
<a href="https://ua.patents.su/4-20167-sposib-viznachennya-parametriv-sistemi-upravlinnya-z-dvigunom-postijjnogo-strumu-ta-pristrijj-dlya-jjogo-zdijjsnennya.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення параметрів системи управління з двигуном постійного струму та пристрій для його здійснення</a>
Пристрій для управління трифазним двигуном змінного струму
Номер патенту: 3042
Опубліковано: 26.12.1994
Автор: Ярославцев Михайло Іванович
МПК: H02P 27/02
Мітки: змінного, двигуном, управління, трифазним, струму, пристрій
Формула / Реферат:
1. Устройство для управления трехфазным двигателем переменного, тока с соединенными в звезду фазными обмотками, содержащее трехфазный мостовой инвертор с силовыми входами и выходами, предназначенными соответственно для подключения к источнику напряжения и фазным обмоткам статора электродвигателя, измерители токов двух первых фаз, задатчики фазных токов, регуляторы фазных токов, подключенные первыми входами к выходам задатчиков фазных токов,...
Електропривод постійного струму
Номер патенту: 15301
Опубліковано: 30.06.1997
Автори: Садовой Олександр Валентинович, Сохіна Юлія Віталіївна
МПК: H02P 7/06
Мітки: постійного, струму, електропривод
Формула / Реферат:
Электропривод постоянного тока, содержащий электродвигатель, подключенный к управляемому преобразователю, в цепь управления которого включены последовательно соединенные регуляторы скорости и тока, входы которых соединены соответственно с датчиками скорости и тока, отличающийся тем, что он дополнительно снабжен включенным между регулятором тока и входом управляемого преобразователя регулятором напряжения, вход которого соединен с датчиком...
Спосіб визначення параметрів вектору дисбалансу роторів та пристрій для його здійснення

Номер патенту: 2744
Опубліковано: 26.12.1994
Автори: Савченко Лідія Михайлівна, Добровольський Геннадій Георгійович, Єфремов Володимир Борисович, Прилуцький Валерій Львович, Муравський Аркадій Миколайович
МПК: G01M 1/22
Мітки: спосіб, здійснення, дисбалансу, пристрій, роторів, визначення, вектору, параметрів
Формула / Реферат:
1. Способ определения параметров вектора дисбаланса роторов, заключающийся в том, что по окружности ротора наносят равноудаленные метки, одну из которых принимают за нулевую, приводят ротор во вращение и о параметрах вектора дисбаланса судят по сигналу с датчика дисбаланса, отличающийся тем, что, с целью повышения точности, отсчитывают число меток в интервале от нулевой метки до метки, совпадающей с моментом перехода сигнала сдатчика...
Прилад для захисту від короткого замикання тиристорного електропривода з двигуном постійного струму незалежного збудження
Номер патенту: 11858
Опубліковано: 25.12.1996
Автори: Хорунжий Юрій Валентинович, Дубинський Андрій Олександрович
МПК: H02H 7/08
Мітки: короткого, електропривода, постійного, захисту, збудження, замикання, тиристорного, струму, незалежного, двигуном, прилад
Формула / Реферат:
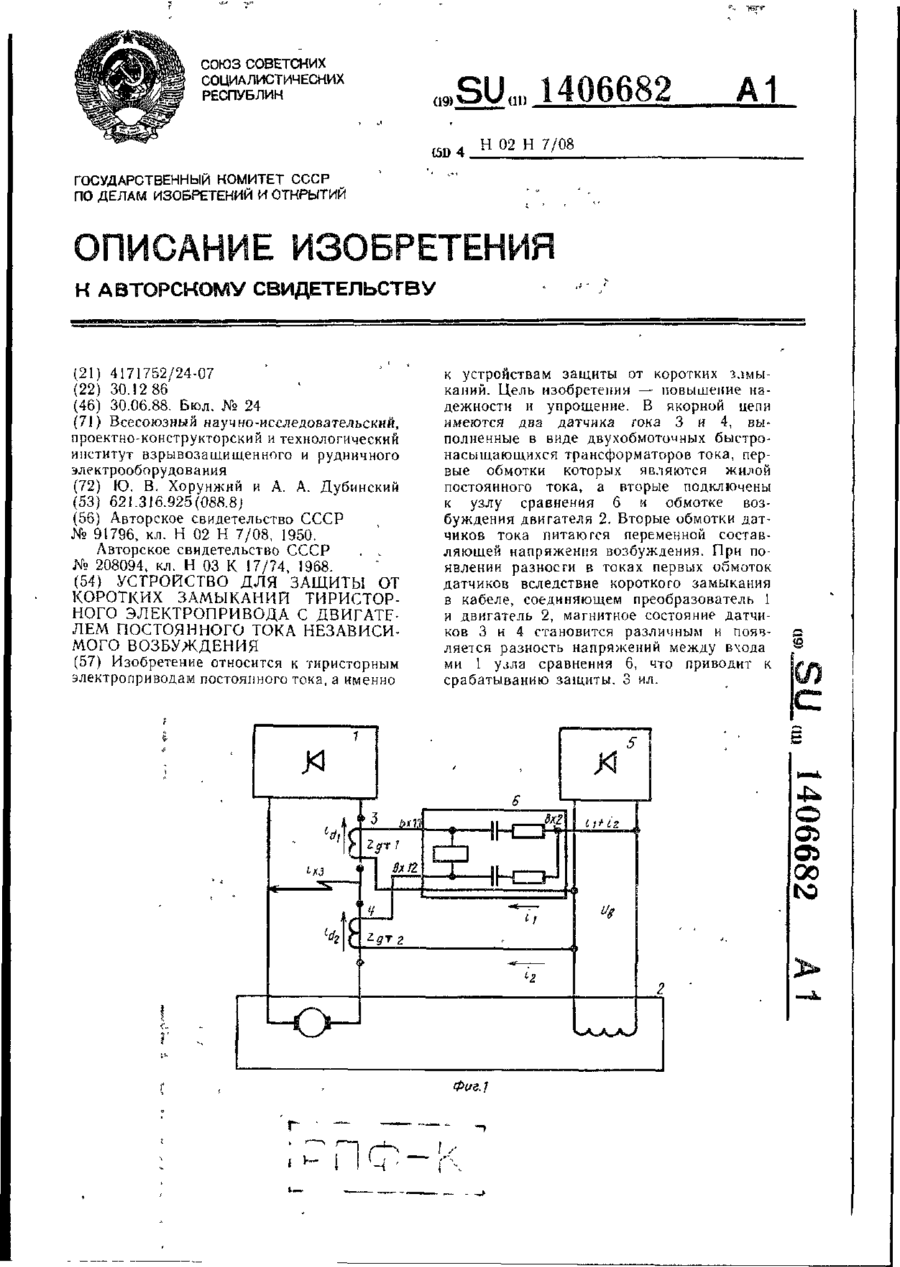
Устройство для защиты от коротких замыканий тиристорного электропривода с двигателем постоянного тока независимого возбуждения, содержащее два датчика тока, при этом первичная обмотка первого датчика тока содержит клеммы для включения в якорную цепь упомянутого двигателя, первые выводы вторичных обмоток датчиков тока подсоединены к соответствующим входам узла сравнения, отличающееся тем, что, с целью повышения надежности и упрощения,...
Спосіб керування електромаховичним двигуном постійного струму в режимі двосторонніх включень
Номер патенту: 10508
Опубліковано: 25.12.1996
Автори: Карпачов Юрій Андрійович, Анупрієнко Генадій Єфремович
МПК: B64G 1/40
Мітки: спосіб, електромаховичним, двосторонніх, керування, двигуном, режимі, постійного, струму, включень
Формула / Реферат:
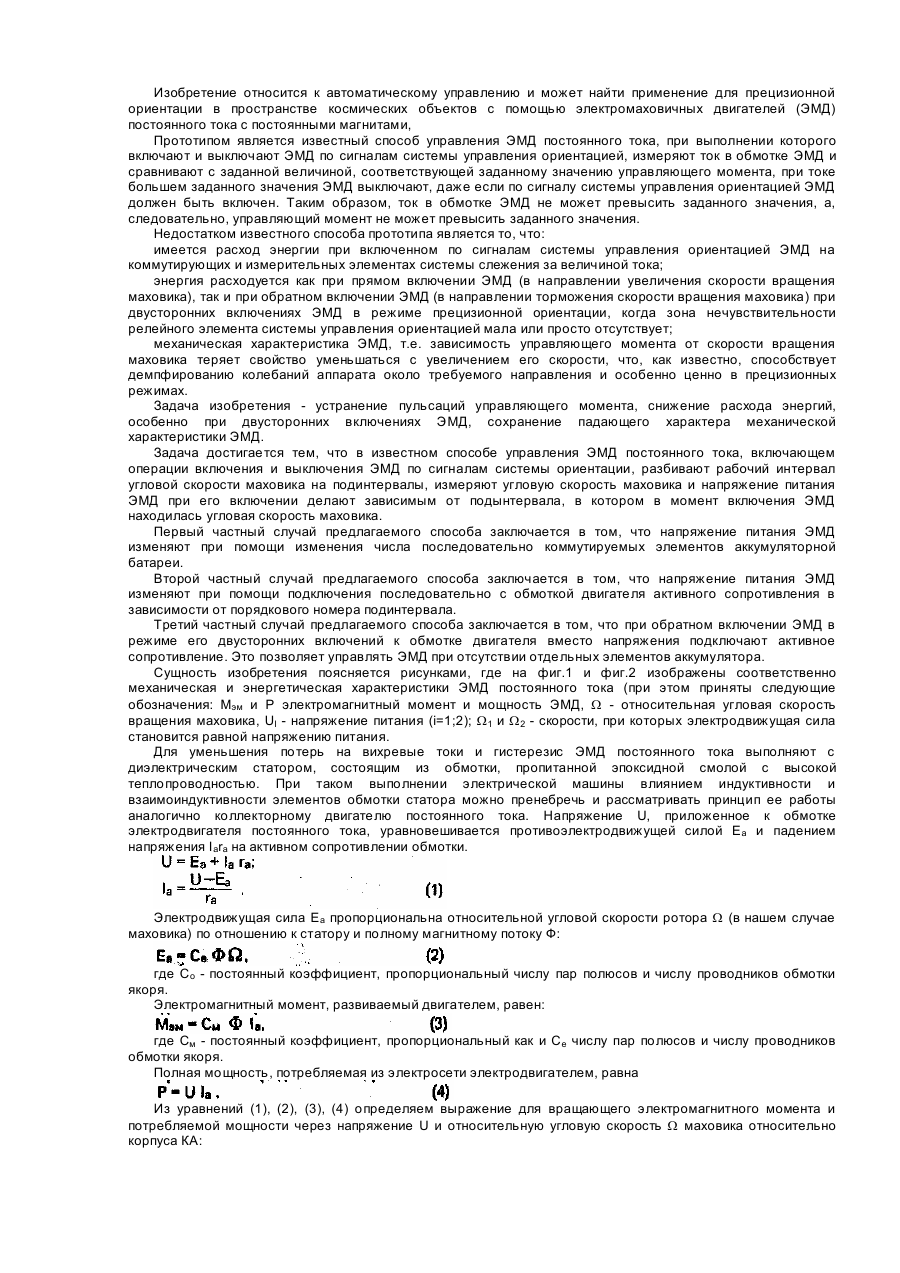
1. Способ управления электромаховичным двигателем (ЭМД) постоянного тока в режиме двусторонних включений, содержащий операции включения и выключения ЭМД по сигналам системы управления ориентацией, отличающийся тем, что разбивают рабочий диапазон угловой скорости маховика на ряд интервалов, измеряют угловую скорость маховика W и величину напряжения питания ЭМД U формируют в зависимости от номера интервала і, в котором в момент включения ЭМД...
Попередній патент: Кристалічний фосфат стронцію sr4(р2о7)(нро4)2 та спосіб його одержання
Наступний патент: Порошкова суміш для рафінування сталі
Випадковий патент: Пристрій для розширення стенозів деформованих трубчастих органів