Джерело сейсмосигналів
Номер патенту: 67509
Опубліковано: 15.06.2004
Автори: Бахшалієв Арустун Шукур-Огли, Малаховскій Євгєній Івановіч, Гнітецький Віталій Анатолійович, Ефендіев Ельдар Ехсан-Огли, Скрипченко Сергій Васильович
Формула / Реферат
1. Джерело сейсмосигналів, що містить електрогідравлічний перетворювач, силовий гідромеханізм з гідроциліндром, штоком і поршнем, опорну плиту, піддон-волокушу, реактивну масу, раму та пружні елементи, причому шток , опорна плита та піддон-волокуша з’єднані жорстко в єдину послідовну конструкцію, а реактивну масу першої, незмінної її частини, складає гідроциліндр з рамою, що жорстко зв'язані між собою, яке відрізняється тим, що на другому кінці штока силового гідромеханізму встановлена додаткова платформа і до джерела додатково введено мінімум дві рейки-важелі, одне плече яких має точки опори на двох шарнірах, які закріплені відповідно на додатковій платформі штока електрогідравлічного перетворювача і на рамі, а на великому плечі рейок-важелів розташовані пересувні вантажі, які можуть пересуватись вздовж рейок-важелів за допомогою механізму пересування вантажів, що утворює другу, змінну частину еквівалентної реактивної маси джерела.
2. Джерело сейсмосигналів за п. 1, яке відрізняється тим, що механізм пересування вантажів виконано у вигляді реверсивного черв'ячно-гвинтового механізму, реверсивний електродвигун якого встановлено на додатковій платформі штока гідромеханізму, а вал електродвигуна з'єднаний з пересувними вантажами за допомогою черв'ячного редуктора і карданних вузлів з гвинтами, розташованими вздовж рейок-важелів, а самі гвинти проходять крізь гвинтову прорізь у тілі вантажів.
Текст
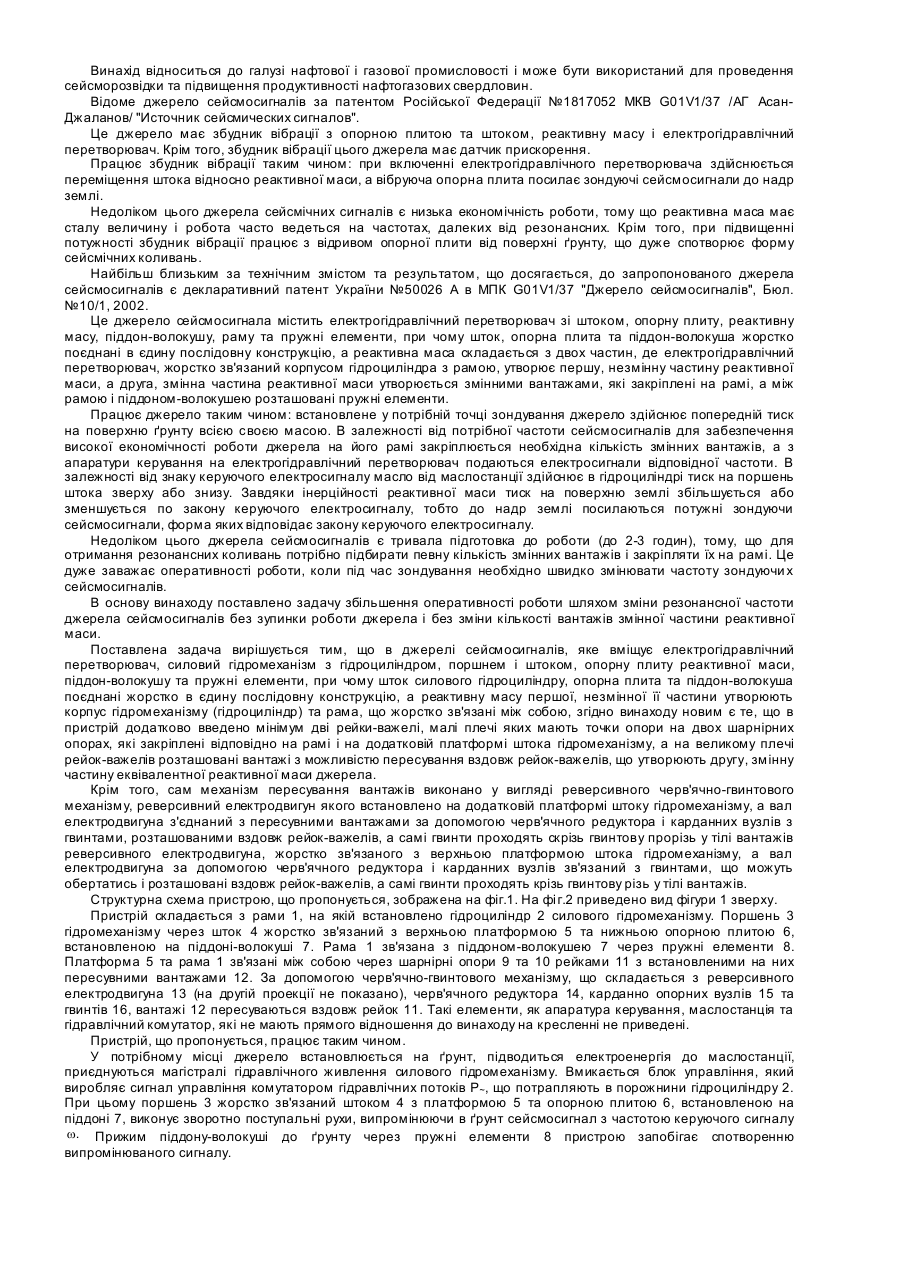
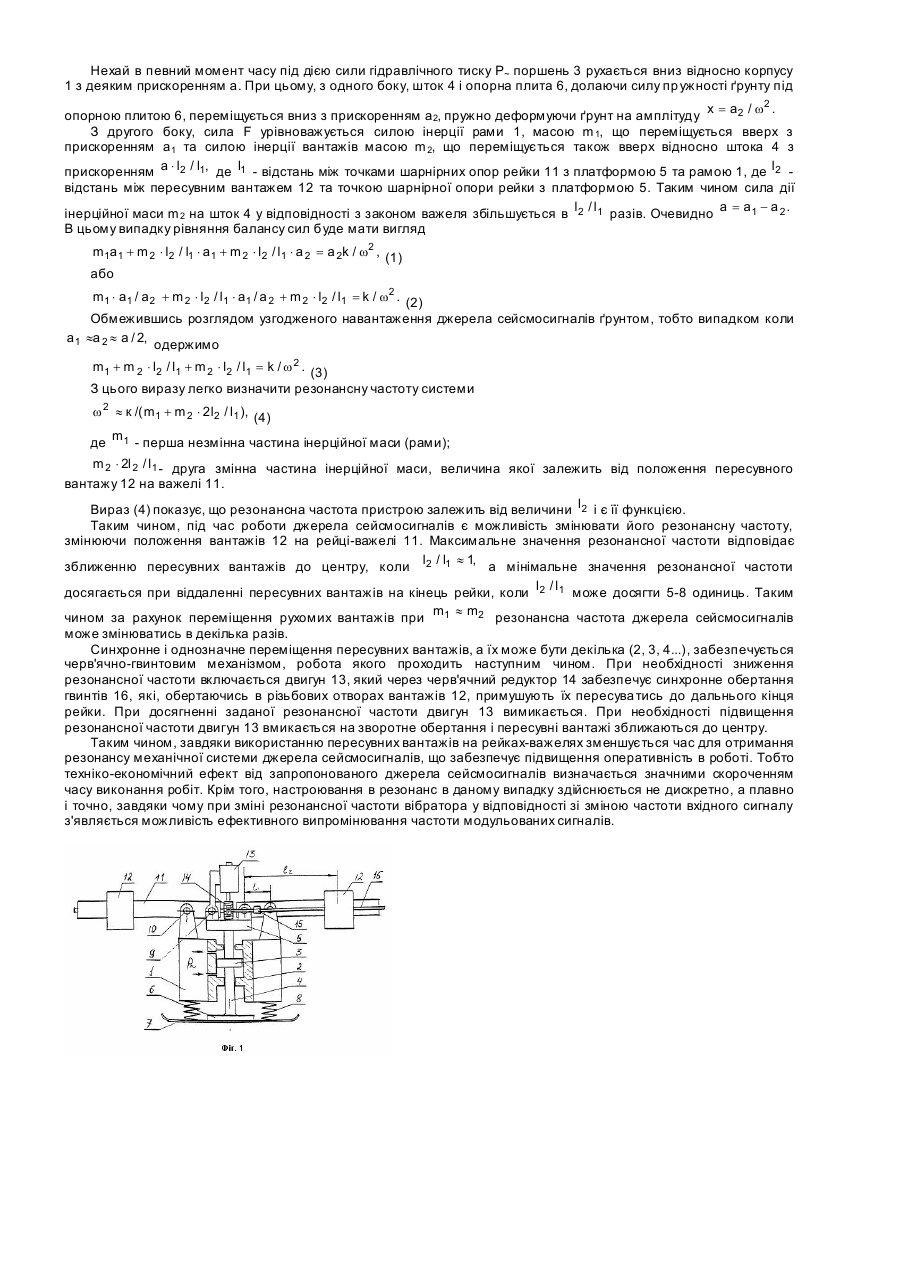
Винахід відноситься до галузі нафтової і газової промисловості і може бути використаний для проведення сейсморозвідки та підвищення продуктивності нафтогазових свердловин. Відоме джерело сейсмосигналів за патентом Російської Федерації №1817052 МКВ G01V1/37 /АГ АсанДжаланов/ "Источник сейсмических сигналов". Це джерело має збудник вібрації з опорною плитою та штоком, реактивну масу і електрогідравлічний перетворювач. Крім того, збудник вібрації цього джерела має датчик прискорення. Працює збудник вібрації таким чином: при включенні електрогідравлічного перетворювача здійснюється переміщення штока відносно реактивної маси, а вібруюча опорна плита посилає зондуючі сейсмосигнали до надр землі. Недоліком цього джерела сейсмічних сигналів є низька економічність роботи, тому що реактивна маса має сталу величину і робота часто ведеться на частотах, далеких від резонансних. Крім того, при підвищенні потужності збудник вібрації працює з відривом опорної плити від поверхні ґрунту, що дуже спотворює форму сейсмічних коливань. Найбільш близьким за технічним змістом та результатом, що досягається, до запропонованого джерела сейсмосигналів є декларативний патент України №50026 А в МПК G01V1/37 "Джерело сейсмосигналів", Бюл. №10/1, 2002. Це джерело сейсмосигнала містить електрогідравлічний перетворювач зі штоком, опорну плиту, реактивну масу, піддон-волокушу, раму та пружні елементи, при чому шток, опорна плита та піддон-волокуша жорстко поєднані в єдину послідовну конструкцію, а реактивна маса складається з двох частин, де електрогідравлічний перетворювач, жорстко зв'язаний корпусом гідроциліндра з рамою, утворює першу, незмінну частину реактивної маси, а друга, змінна частина реактивної маси утворюється змінними вантажами, які закріплені на рамі, а між рамою і піддоном-волокушею розташовані пружні елементи. Працює джерело таким чином: встановлене у потрібній точці зондування джерело здійснює попередній тиск на поверхню ґрунту всією своєю масою. В залежності від потрібної частоти сейсмосигналів для забезпечення високої економічності роботи джерела на його рамі закріплюється необхідна кількість змінних вантажів, а з апаратури керування на електрогідравлічний перетворювач подаються електросигнали відповідної частоти. В залежності від знаку керуючого електросигналу масло від маслостанції здійснює в гідроциліндрі тиск на поршень штока зверху або знизу. Завдяки інерційності реактивної маси тиск на поверхню землі збільшується або зменшується по закону керуючого електросигналу, тобто до надр землі посилаються потужні зондуючи сейсмосигнали, форма яких відповідає закону керуючого електросигналу. Недоліком цього джерела сейсмосигналів є тривала підготовка до роботи (до 2-3 годин), тому, що для отримання резонансних коливань потрібно підбирати певну кількість змінних вантажів і закріпляти їх на рамі. Це дуже заважає оперативності роботи, коли під час зондування необхідно швидко змінювати частоту зондуючи х сейсмосигналів. В основу винаходу поставлено задачу збільшення оперативності роботи шляхом зміни резонансної частоти джерела сейсмосигналів без зупинки роботи джерела і без зміни кількості вантажів змінної частини реактивної маси. Поставлена задача вирішується тим, що в джерелі сейсмосигналів, яке вміщує електрогідравлічний перетворювач, силовий гідромеханізм з гідроциліндром, поршнем і штоком, опорну плиту реактивної маси, піддон-волокушу та пружні елементи, при чому шток силового гідроциліндру, опорна плита та піддон-волокуша поєднані жорстко в єдину послідовну конструкцію, а реактивну масу першої, незмінної її частини утворюють корпус гідромеханізму (гідроциліндр) та рама, що жорстко зв'язані між собою, згідно винаходу новим є те, що в пристрій додатково введено мінімум дві рейки-важелі, малі плечі яких мають точки опори на двох шарнірних опорах, які закріплені відповідно на рамі і на додатковій платформі штока гідромеханізму, а на великому плечі рейок-важелів розташовані вантажі з можливістю пересування вздовж рейок-важелів, що утворюють другу, змінну частину еквівалентної реактивної маси джерела. Крім того, сам механізм пересування вантажів виконано у вигляді реверсивного черв'ячно-гвинтового механізму, реверсивний електродвигун якого встановлено на додатковій платформі штоку гідромеханізму, а вал електродвигуна з'єднаний з пересувними вантажами за допомогою черв'ячного редуктора і карданних вузлів з гвинтами, розташованими вздовж рейок-важелів, а самі гвинти проходять скрізь гвинтову прорізь у тілі вантажів реверсивного електродвигуна, жорстко зв'язаного з верхньою платформою штока гідромеханізму, а вал електродвигуна за допомогою черв'ячного редуктора і карданних вузлів зв'язаний з гвинтами, що можуть обертатись і розташовані вздовж рейок-важелів, а самі гвинти проходять крізь гвинтову різь у тілі вантажів. Структурна схема пристрою, що пропонується, зображена на фіг.1. На фі г.2 приведено вид фігури 1 зверху. Пристрій складається з рами 1, на якій встановлено гідроциліндр 2 силового гідромеханізму. Поршень 3 гідромеханізму через шток 4 жорстко зв'язаний з верхньою платформою 5 та нижньою опорною плитою 6, встановленою на піддоні-волокуші 7. Рама 1 зв'язана з піддоном-волокушею 7 через пружні елементи 8. Платформа 5 та рама 1 зв'язані між собою через шарнірні опори 9 та 10 рейками 11 з встановленими на них пересувними вантажами 12. За допомогою черв'ячно-гвинтового механізму, що складається з реверсивного електродвигуна 13 (на другій проекції не показано), черв'ячного редуктора 14, карданно опорних вузлів 15 та гвинтів 16, вантажі 12 пересуваються вздовж рейок 11. Такі елементи, як апаратура керування, маслостанція та гідравлічний комутатор, які не мають прямого відношення до винаходу на кресленні не приведені. Пристрій, що пропонується, працює таким чином. У потрібному місці джерело встановлюється на ґрунт, підводиться електроенергія до маслостанції, приєднуються магістралі гідравлічного живлення силового гідромеханізму. Вмикається блок управління, який виробляє сигнал управління комутатором гідравлічних потоків Р~, що потрапляють в порожнини гідроциліндру 2. При цьому поршень 3 жорстко зв'язаний штоком 4 з платформою 5 та опорною плитою 6, встановленою на піддоні 7, виконує зворотно поступальні рухи, випромінюючи в ґрунт сейсмосигнал з частотою керуючого сигналу w. Прижим піддону-волокуші до ґрунту через пружні елементи 8 пристрою запобігає спотворенню випромінюваного сигналу. Нехай в певний момент часу під дією сили гідравлічного тиску Р~ поршень 3 рухається вниз відносно корпусу 1 з деяким прискоренням а. При цьому, з одного боку, шток 4 і опорна плита 6, долаючи силу пр ужності ґрунту під 2 опорною плитою 6, переміщується вниз з прискоренням а2, пружно деформуючи ґрунт на амплітуду x = a2 / w . З другого боку, сила F урівноважується силою інерції рами 1, масою m 1, що переміщується вверх з прискоренням а1 та силою інерції вантажів масою m 2, що переміщується також вверх відносно штока 4 з прискоренням a × l2 / l1, де l1 - відстань між точками шарнірних опор рейки 11 з платформою 5 та рамою 1, де l2 відстань між пересувним вантажем 12 та точкою шарнірної опори рейки з платформою 5. Таким чином сила дії інерційної маси m на шток 4 у відповідності з законом важеля збільшується в l2 / l1 разів. Очевидно a = a1 - a 2 . 2 В цьому випадку рівняння балансу сил буде мати вигляд m1a1 + m 2 × l2 / l1 × a1 + m 2 × l2 / l1 × a 2 = a 2k / w2 , (1) або m1 × a1 / a2 + m 2 × l2 / l1 × a1 / a 2 + m 2 × l2 / l1 = k / w2 . (2) Обмежившись розглядом узгодженого навантаження джерела сейсмосигналів ґрунтом, тобто випадком коли a1 »a 2 » a / 2, одержимо m1 + m 2 × l2 / l1 + m 2 × l2 / l1 = k / w 2 . (3) З цього виразу легко визначити резонансну частоту системи w 2 » к /( m1 + m 2 × 2l2 / l1 ), (4) де m1 - перша незмінна частина інерційної маси (рами); m 2 × 2l 2 / l1 - друга змінна частина інерційної маси, величина якої залежить від положення пересувного вантажу 12 на важелі 11. Вираз (4) показує, що резонансна частота пристрою залежить від величини l2 і є її функцією. Таким чином, під час роботи джерела сейсмосигналів є можливість змінювати його резонансну частоту, змінюючи положення вантажів 12 на рейці-важелі 11. Максимальне значення резонансної частоти відповідає зближенню пересувних вантажів до центру, коли l2 / l1 » 1, а мінімальне значення резонансної частоти досягається при віддаленні пересувних вантажів на кінець рейки, коли l2 / l1 може досягти 5-8 одиниць. Таким чином за рахунок переміщення рухомих вантажів при m1 » m2 резонансна частота джерела сейсмосигналів може змінюватись в декілька разів. Синхронне і однозначне переміщення пересувних вантажів, а їх може бути декілька (2, 3, 4...), забезпечується черв'ячно-гвинтовим механізмом, робота якого проходить наступним чином. При необхідності зниження резонансної частоти включається двигун 13, який через черв'ячний редуктор 14 забезпечує синхронне обертання гвинтів 16, які, обертаючись в різьбових отворах вантажів 12, примушують їх пересува тись до дальнього кінця рейки. При досягненні заданої резонансної частоти двигун 13 вимикається. При необхідності підвищення резонансної частоти двигун 13 вмикається на зворотне обертання і пересувні вантажі зближаються до центру. Таким чином, завдяки використанню пересувних вантажів на рейках-важелях зменшується час для отримання резонансу механічної системи джерела сейсмосигналів, що забезпечує підвищення оперативність в роботі. Тобто техніко-економічний ефект від запропонованого джерела сейсмосигналів визначається значними скороченням часу виконання робіт. Крім того, настроювання в резонанс в даному випадку здійснюється не дискретно, а плавно і точно, завдяки чому при зміні резонансної частоти вібратора у відповідності зі зміною частоти вхідного сигналу з'являється можливість ефективного випромінювання частоти модульованих сигналів.
ДивитисяДодаткова інформація
Назва патенту англійськоюSeismic signal source
Автори англійськоюHnitetskyi Vitalii Anatoliiovych, Skrypchenko Serhii Vasyliovych
Назва патенту російськоюИсточник сейсмических сигналов
Автори російськоюГнитецкий Виталий Анатольевич, Скрипченко Сергей Васильевич
МПК / Мітки
Мітки: сейсмосигналів, джерело
Код посилання
<a href="https://ua.patents.su/3-67509-dzherelo-sejjsmosignaliv.html" target="_blank" rel="follow" title="База патентів України">Джерело сейсмосигналів</a>
Джерело сейсмосигналів
Номер патенту: 50026
Опубліковано: 15.10.2002
Автори: Пасльон Володимир Іванович, Гнітецький Віталій Анатолійович, Горбунов Валерій Іванович, Бахшалієв Арастун Шукур-огли, Малаховський Євген Іванович, Скрипченко Сергій Васильович, Хотульов Геннадій Петрович, Бульбас Валерій Миколайович
МПК: G01V 1/28
Мітки: джерело, сейсмосигналів
Формула / Реферат:
Джерело сейсмосигналів, що вміщує електрогідравлічний перетворювач зі штоком, опорну плиту, реактивну масу, яке відрізняється тим, що в нього додатково введені піддон-волокуша, рама, та пружні елементи, при чому шток, опорна плита та піддон-волокуша поєднані жорстко в єдину послідовну конструкцію, реактивна маса складається з двох частин, де електрогідравлічний перетворювач корпусом власного гідроциліндра жорстко зв'язаний з рамою і ця...
Статичне регульоване джерело реактивної потужності для трифазних мереж
Номер патенту: 52813
Опубліковано: 15.01.2003
Автори: Паранчук Ярослав Степанович, Лозинський Андрій Орестович, Лозинський Орест Юліанович, Паранчук Роман Ярославович
МПК: H02J 3/18
Мітки: джерело, реактивної, мереж, трифазних, статичне, потужності, регульоване
Формула / Реферат:
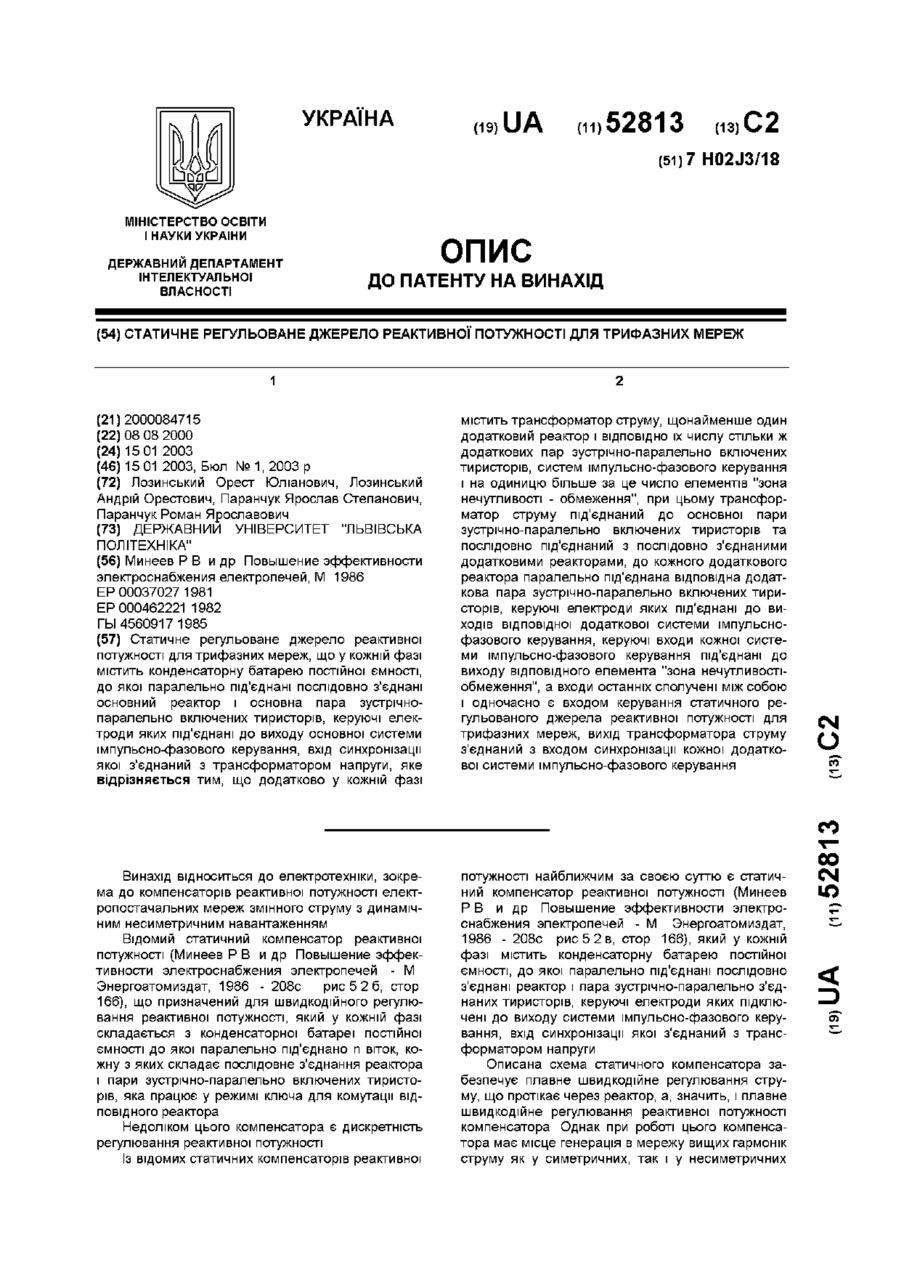
Статичне регульоване джерело реактивної потужності для трифазних мереж, що у кожній фазі містить конденсаторну батарею постійної ємності, до якої паралельно під'єднані послідовно з'єднані основний реактор і основна пара зустрічно-паралельно включених тиристорів, керуючі електроди яких під'єднані до виходу основної системи імпульсно-фазового керування, вхід синхронізації якої з'єднаний з трансформатором напруги, яке відрізняється тим, що...
Джерело поліхроматичного електромагнітного випромінювання нетеплової інтенсивності
Номер патенту: 64817
Опубліковано: 15.03.2004
Автори: Скрипник Юрій Олексійович, Перегудов Сергій Миколайович, Яненко Олексій Пилипович
МПК: A61H 39/00
Мітки: випромінювання, поліхроматичного, електромагнітного, нетеплової, джерело, інтенсивності
Формула / Реферат:
1. Джерело поліхроматичного електромагнітного випромінювання нетеплової інтенсивності, що містить корпус-радіатор, всередині якого розташований випромінюючий діод ІЧ-діапазону, на всій робочій поверхні якого нанесений тонкий провідний шар, регульоване джерело живлення, виходами з'єднане з електродами випромінюючого діода, і міліамперметр, увімкнений в ланцюг живлення випромінюючого діода, яке відрізняється тим, що введені відрізок хвилеводу...
Генераторне джерело електроенергії

Номер патенту: 62286
Опубліковано: 15.12.2003
Автори: Копчак Богдан Любомирович, Ткачук Василь Іванович
МПК: H02P 9/00
Мітки: генераторне, джерело, електроенергії
Формула / Реферат:
Генераторне джерело електроенергії, що містить асинхронну машину з силовими виводами, під'єднаними до конденсаторної батареї початкового збудження, навантаження, вхідних виводів блока імпульсно-фазового керування компенсаційним перетворювачем, силових входів керованого вентильного компенсаційного перетворювача, виконаного за мостовою схемою, і задавач напруги генераторного джерела електроенергії, яке відрізняється тим, що додатково містить...
Іскробезпечне джерело живлення
Номер патенту: 58369
Опубліковано: 15.07.2003
Автори: Коломійців Анатолій Кузьмич, Сидяк Володимир Олександрович, Сіроткін Олександр Арнольдович
МПК: E21F 9/00
Мітки: джерело, живлення, іскробезпечне
Формула / Реферат:
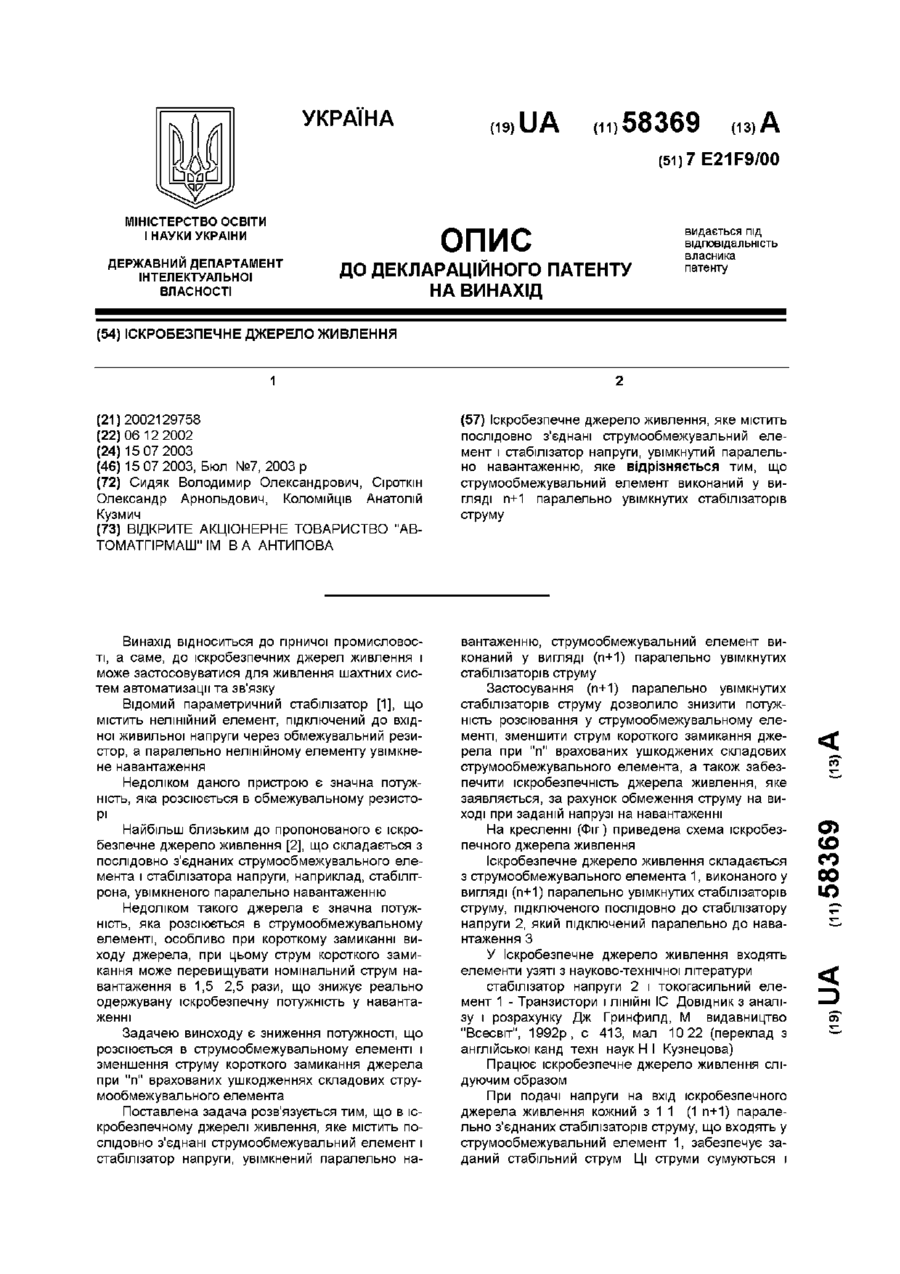
Іскробезпечне джерело живлення, яке містить послідовно з'єднані струмообмежувальний елемент і стабілізатор напруги, увімкнутий паралельно навантаженню, яке відрізняється тим, що струмообмежувальний елемент виконаний у вигляді n+1 паралельно увімкнутих стабілізаторів струму.
Попередній патент: Спосіб отримання целюлози
Наступний патент: Пристрій для закріплення на поверхні листових носіїв інформації
Випадковий патент: Гербіцидні композиції