Пристрій по догляду за копитцями свійських тварин
Номер патенту: 71212
Опубліковано: 15.11.2004
Автори: Рибалко Вячеслав Миколайович, Білоножко Володимир Михайлович, Ярошенко Володимир Федорович
Формула / Реферат
Пристрій по догляду за копитцями свійських тварин, що складається з каркаса, на якому встановлені решітчасті опорні поверхні, між пластинами яких розміщені робочі органи - різальні елементи, закріплені на гнучких тягових органах, і фіксатор кінцівок тварин, який відрізняється тим, що пристрій обладнано системою управління фіксатором кінцівок тварин, додатково обладнаною гідроприводом і джерелами поляризованого некогерентного світла з довжиною хвилі 400... 2000 нм, причому кожне джерело поляризованого некогерентного світла має захисний конус, у нижній частині якого встановлено пружну гумову стяжку.
Текст
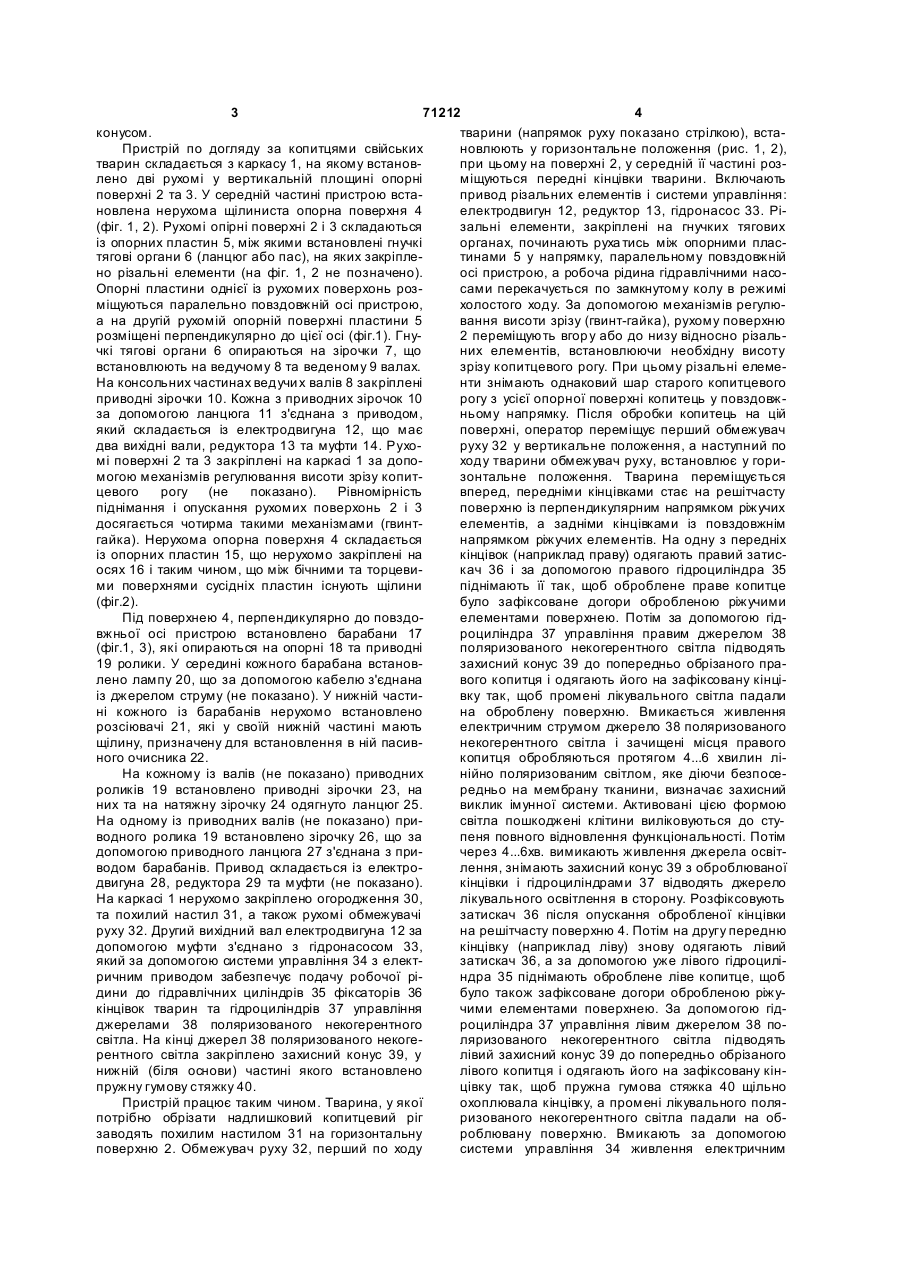
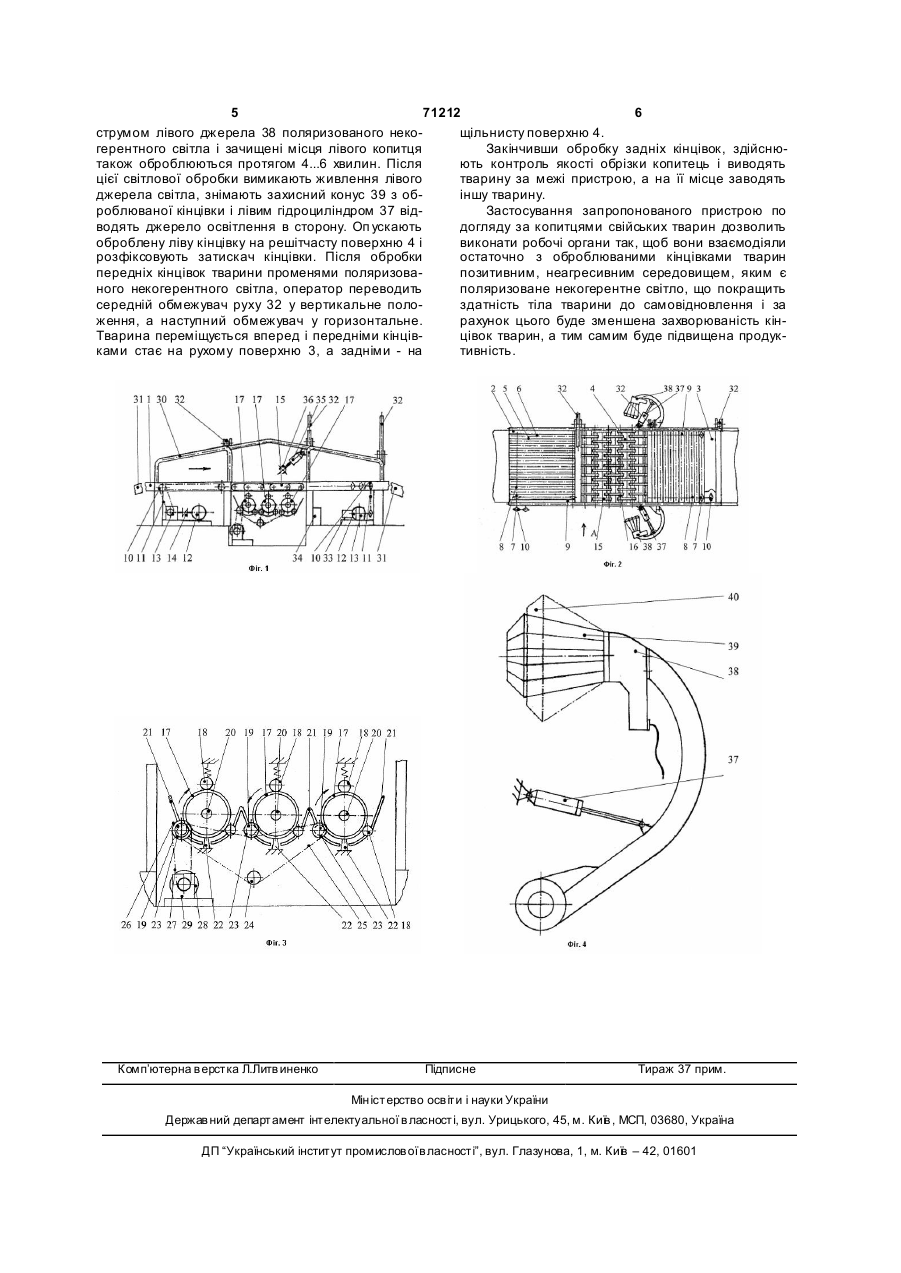
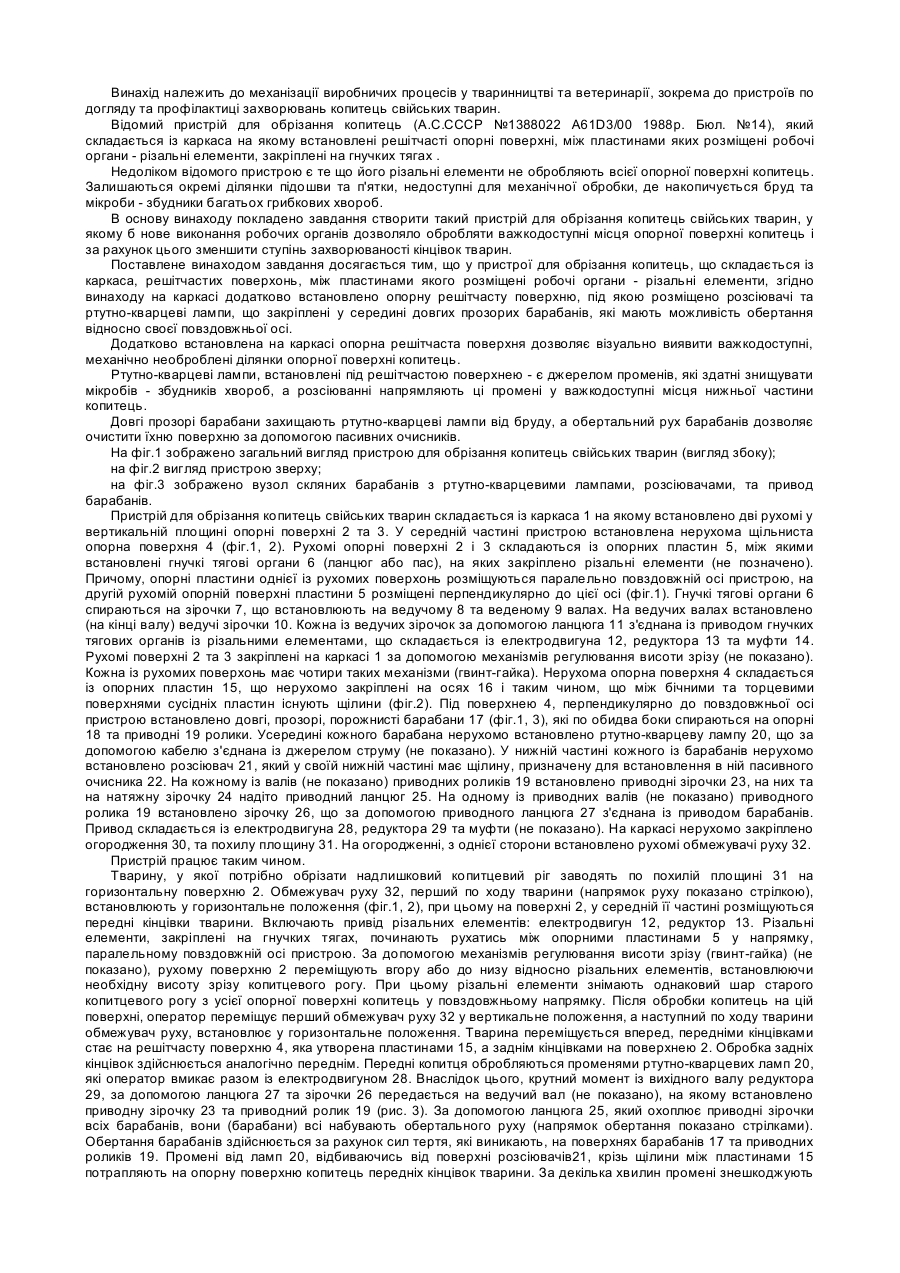
Пристрій по догляду за копитцями свійських тварин, що складається з каркаса, на якому встановлені решітчасті опорні поверхні, між пластина 3 71212 4 конусом. тварини (напрямок руху показано стрілкою), встаПристрій по догляду за копитцями свійських новлюють у горизонтальне положення (рис. 1, 2), тварин складається з каркасу 1, на якому встановпри цьому на поверхні 2, у середній її частині розлено дві рухомі у вертикальній площині опорні міщуються передні кінцівки тварини. Включають поверхні 2 та 3. У середній частині пристрою встапривод різальних елементів і системи управління: новлена нерухома щілиниста опорна поверхня 4 електродвигун 12, редуктор 13, гідронасос 33. Рі(фіг. 1, 2). Рухомі опірні поверхні 2 і 3 складаються зальні елементи, закріплені на гнучких тягових із опорних пластин 5, між якими встановлені гнучкі органах, починають руха тись між опорними пластягові органи 6 (ланцюг або пас), на яких закріплетинами 5 у напрямку, паралельному повздовжній но різальні елементи (на фіг. 1, 2 не позначено). осі пристрою, а робоча рідина гідравлічними насоОпорні пластини однієї із рухомих поверхонь розсами перекачується по замкнутому колу в режимі міщуються паралельно повздовжній осі пристрою, холостого ходу. За допомогою механізмів регулюа на другій рухомій опорній поверхні пластини 5 вання висоти зрізу (гвинт-гайка), рухому поверхню розміщені перпендикулярно до цієї осі (фіг.1). Гну2 переміщують вгор у або до низу відносно різальчкі тягові органи 6 опираються на зірочки 7, що них елементів, встановлюючи необхідну висоту встановлюють на ведучому 8 та веденому 9 валах. зрізу копитцевого рогу. При цьому різальні елемеНа консольних частинах ведучи х валів 8 закріплені нти знімають однаковий шар старого копитцевого приводні зірочки 10. Кожна з приводних зірочок 10 рогу з усієї опорної поверхні копитець у повздовжза допомогою ланцюга 11 з'єднана з приводом, ньому напрямку. Після обробки копитець на цій який складається із електродвигуна 12, що має поверхні, оператор переміщує перший обмежувач два вихідні вали, редуктора 13 та муфти 14. Рухоруху 32 у вертикальне положення, а наступний по мі поверхні 2 та 3 закріплені на каркасі 1 за допоходу тварини обмежувач руху, встановлює у горимогою механізмів регулювання висоти зрізу копитзонтальне положення. Тварина переміщується цевого рогу (не показано). Рівномірність вперед, передніми кінцівками стає на решітчасту піднімання і опускання рухомих поверхонь 2 і 3 поверхню із перпендикулярним напрямком ріжучих досягається чотирма такими механізмами (гвинтелементів, а задніми кінцівками із повздовжнім гайка). Нерухома опорна поверхня 4 складається напрямком ріжучих елементів. На одну з передніх із опорних пластин 15, що нерухомо закріплені на кінцівок (наприклад праву) одягають правий затисосях 16 і таким чином, що між бічними та торцевикач 36 і за допомогою правого гідроциліндра 35 ми поверхнями сусідніх пластин існують щілини піднімають її так, щоб оброблене праве копитце (фіг.2). було зафіксоване догори обробленою ріжучими Під поверхнею 4, перпендикулярно до повздоелементами поверхнею. Потім за допомогою гідвжньої осі пристрою встановлено барабани 17 роциліндра 37 управління правим джерелом 38 (фіг.1, 3), які опираються на опорні 18 та приводні поляризованого некогерентного світла підводять 19 ролики. У середині кожного барабана встановзахисний конус 39 до попередньо обрізаного пралено лампу 20, що за допомогою кабелю з'єднана вого копитця і одягають його на зафіксовану кінцііз джерелом струму (не показано). У нижній частивку так, щоб промені лікувального світла падали ні кожного із барабанів нерухомо встановлено на оброблену поверхню. Вмикається живлення розсіювачі 21, які у своїй нижній частині мають електричним струмом джерело 38 поляризованого щілину, призначену для встановлення в ній пасивнекогерентного світла і зачищені місця правого ного очисника 22. копитця обробляються протягом 4...6 хвилин ліНа кожному із валів (не показано) приводних нійно поляризованим світлом, яке діючи безпосероликів 19 встановлено приводні зірочки 23, на редньо на мембрану тканини, визначає захисний них та на натяжну зірочку 24 одягнуто ланцюг 25. виклик імунної системи. Активовані цією формою На одному із приводних валів (не показано) присвітла пошкоджені клітини виліковуються до стуводного ролика 19 встановлено зірочку 26, що за пеня повного відновлення функціональності. Потім допомогою приводного ланцюга 27 з'єднана з причерез 4...6хв. вимикають живлення джерела освітводом барабанів. Привод складається із електролення, знімають захисний конус 39 з оброблюваної двигуна 28, редуктора 29 та муфти (не показано). кінцівки і гідроциліндрами 37 відводять джерело На каркасі 1 нерухомо закріплено огородження 30, лікувального освітлення в сторону. Розфіксовують та похилий настил 31, а також рухомі обмежувачі затискач 36 після опускання обробленої кінцівки руху 32. Другий вихідний вал електродвигуна 12 за на решітчасту поверхню 4. Потім на другу передню допомогою муфти з'єднано з гідронасосом 33, кінцівку (наприклад ліву) знову одягають лівий який за допомогою системи управління 34 з електзатискач 36, а за допомогою уже лівого гідроциліричним приводом забезпечує подачу робочої ріндра 35 піднімають оброблене ліве копитце, щоб дини до гідравлічних циліндрів 35 фіксаторів 36 було також зафіксоване догори обробленою ріжукінцівок тварин та гідроциліндрів 37 управління чими елементами поверхнею. За допомогою гідджерелами 38 поляризованого некогерентного роциліндра 37 управління лівим джерелом 38 посвітла. На кінці джерел 38 поляризованого некогеляризованого некогерентного світла підводять рентного світла закріплено захисний конус 39, у лівий захисний конус 39 до попередньо обрізаного нижній (біля основи) частині якого встановлено лівого копитця і одягають його на зафіксовану кінпружну гумову стяжку 40. цівку так, щоб пружна гумова стяжка 40 щільно Пристрій працює таким чином. Тварина, у якої охоплювала кінцівку, а промені лікувального поляпотрібно обрізати надлишковий копитцевий ріг ризованого некогерентного світла падали на обзаводять похилим настилом 31 на горизонтальну роблювану поверхню. Вмикають за допомогою поверхню 2. Обмежувач руху 32, перший по ходу системи управління 34 живлення електричним 5 71212 6 струмом лівого джерела 38 поляризованого некощільнисту поверхню 4. герентного світла і зачищені місця лівого копитця Закінчивши обробку задніх кінцівок, здійснютакож оброблюються протягом 4...6 хвилин. Після ють контроль якості обрізки копитець і виводять цієї світлової обробки вимикають живлення лівого тварину за межі пристрою, а на її місце заводять джерела світла, знімають захисний конус 39 з обіншу тварину. роблюваної кінцівки і лівим гідроциліндром 37 відЗастосування запропонованого пристрою по водять джерело освітлення в сторону. Оп ускають догляду за копитцями свійських тварин дозволить оброблену ліву кінцівку на решітчасту поверхню 4 і виконати робочі органи так, щоб вони взаємодіяли розфіксовують затискач кінцівки. Після обробки остаточно з оброблюваними кінцівками тварин передніх кінцівок тварини променями поляризовапозитивним, неагресивним середовищем, яким є ного некогерентного світла, оператор переводить поляризоване некогерентне світло, що покращить середній обмежувач руху 32 у вертикальне полоздатність тіла тварини до самовідновлення і за ження, а наступний обмежувач у горизонтальне. рахунок цього буде зменшена захворюваність кінТварина переміщується вперед і передніми кінцівцівок тварин, а тим самим буде підвищена продукками стає на рухому поверхню 3, а задніми - на тивність. Комп’ютерна в ерстка Л.Литв иненко Підписне Тираж 37 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for clearing hooves of domestic animals
Автори англійськоюYaroshenko Volodymyr Fedorovych, Rybalko Viacheslav Mykolaiovych, Bilonozhko Volodymyr Mykhailovych
Назва патенту російськоюУстройство по уходу за копытами домашних животных
Автори російськоюЯрошенко Владимир Федорович, Рыбалко Вячеслав Николаевич, Билоножко Владимир Михайлович
МПК / Мітки
МПК: A61D 3/00
Мітки: свійських, тварин, пристрій, копитцями, догляду
Код посилання
<a href="https://ua.patents.su/3-71212-pristrijj-po-doglyadu-za-kopitcyami-svijjskikh-tvarin.html" target="_blank" rel="follow" title="База патентів України">Пристрій по догляду за копитцями свійських тварин</a>
Пристрій для обрізання копитець свійських тварин
Номер патенту: 69095
Опубліковано: 16.08.2004
Автори: Рибалко Вячеслав Миколайович, Білоножко Володимир Михайлович, Ярошенко Володимир Федорович
МПК: A01L 11/00
Мітки: свійських, тварин, пристрій, копитець, обрізання
Формула / Реферат:
Пристрій для обрізання копитець, що складається із каркаса, на якому встановлені решітчасті опорні поверхні, між пластинами яких розміщені робочі органи - різальні елементи, закріплені на гнучких тягах, який відрізняється тим, що на каркасі пристрою встановлено додатково опорну решітчасту поверхню, під якою розміщено розсіювачі та ртутно-кварцеві лампи, що встановлені усередині довгих прозорих барабанів, які мають можливість обертання...
Пристрій для контролю геометричних характеристик копитець та копит свійських тварин
Номер патенту: 66944
Опубліковано: 15.06.2004
Автори: Рибалко Вячеслав Миколайович, Рибалко Дмитро Вячеславович, Ярошенко Володимир Федорович, Рудик Станіслав Костянтинович
МПК: A01K 29/00, A01L 15/00
Мітки: пристрій, копитець, геометричних, копит, свійських, тварин, контролю, характеристик
Формула / Реферат:
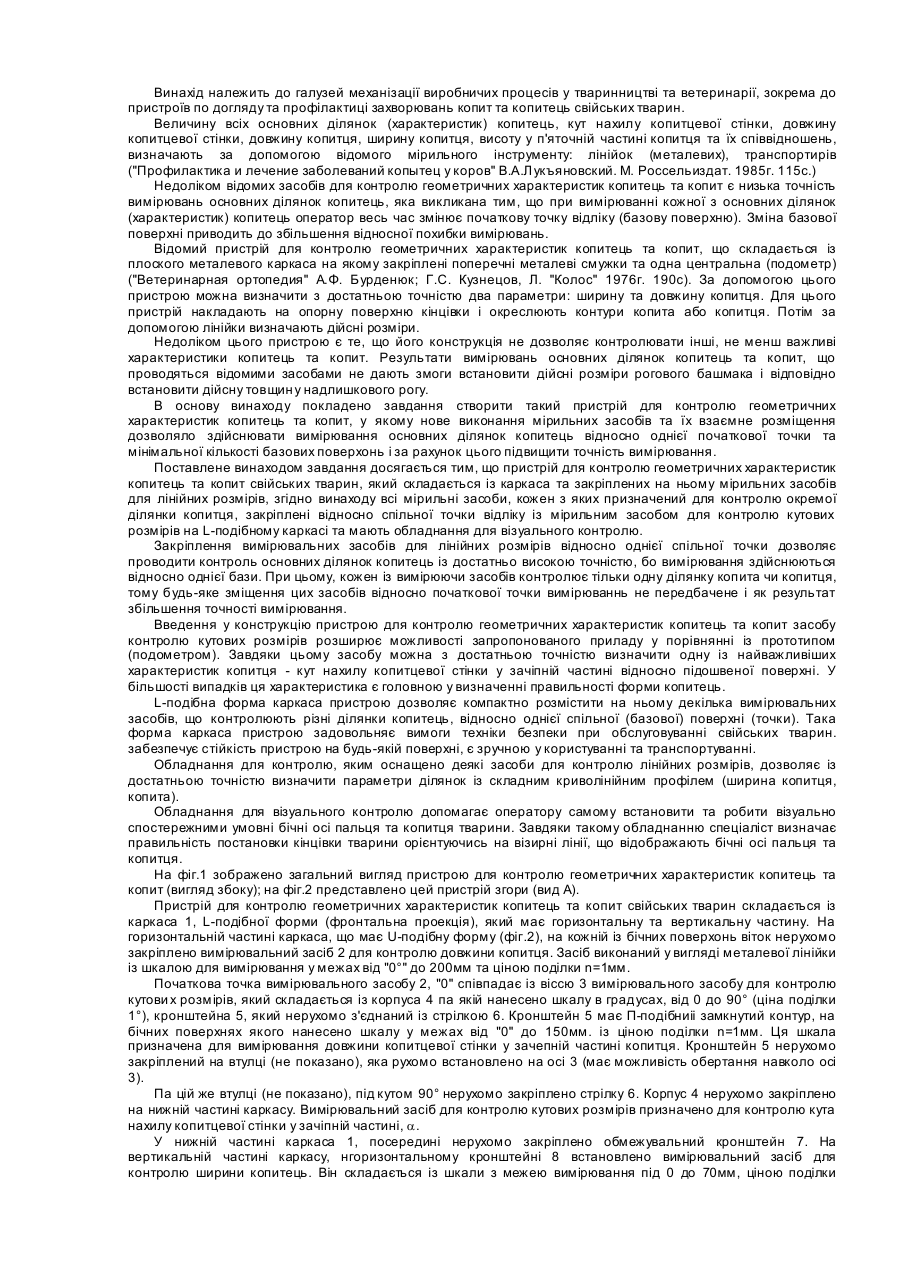
Пристрій для контролю геометричних характеристик копитець та копит свійських тварин, що складається із каркаса та закріплених на ньому засобів для контролю лінійних розмірів, який відрізняється тим, що всі вимірювальні засоби для контролю лінійних розмірів, кожен з яких призначений для контролю окремої ділянки копитця (копита), закріплені відносно спільної точки відліку із вимірювальним засобом для контролю кутових розмірів на L-подібному...
Препарат для профілактики і лікування бактеріальних інфекцій свійських тварин і птиці “бровасептол”
Номер патенту: 52493
Опубліковано: 16.12.2002
Автор: Березовський Андрій Володимирович
МПК: A61K 31/00
Мітки: бактеріальних, свійських, тварин, бровасептол, профілактики, препарат, птиці, лікування, інфекцій
Формула / Реферат:
Препарат для профілактики і лікування бактеріальних інфекцій свійських тварин і птиці, виконаний у вигляді порошку, що містить композицію на основі триметоприму, який відрізняється тим, що додатково містить норсульфазол, сульгін, окситетрацикліну гідрохлорид, тилозину тартрат, кукурудзяний крохмаль за таким співвідношенням інгредієнтів у мас %: норсульфазол 8,0 сульгін 7,0 ...
Підстілка для дрібних свійських тварин

Номер патенту: 17127
Опубліковано: 18.03.1997
Автор: Лук'яненко Володимир Васильович
МПК: A01K 1/015
Мітки: свійських, тварин, дрібних, підстілка
Формула / Реферат:
Подстилка для мелких домашних животных, состоящая из высокопористых химических соединений, отличающаяся тем, что в качестве подстилочного материала используют монтмориллонитовые, в частности бентонитовые глины.
Спосіб одержання препарату для профілактики інфекційних захворювань у свійських тварин
Номер патенту: 10273
Опубліковано: 25.12.1996
Автори: Кіфоренко Євген Іванович, Замковий Віталій Кузьмович, Кулаков Дмітрій Фьодоровіч, Потапов Юрій Миколайович
МПК: A61K 33/34
Мітки: свійських, спосіб, одержання, захворювань, профілактики, препарату, тварин, інфекційних
Формула / Реферат:
Способ получения препарата для профилактики инфекционных заболеваний домашних животных, предусматривающий осуществление электролиза в водной среде с использованием анода, выполненного из материала, являющегося источником антисептических ионов, и размещенного в мембранной оболочке, непроницаемой для упомянутых ионов, до получения в оболочке требуемой концентрации указанных ионов, отличающийся тем, что электролиз осуществляют в...
Попередній патент: Спікальний візок
Наступний патент: Спосіб хірургічного лікування хронічного періодонтиту
Випадковий патент: Плавильно-газифікаційний апарат для отримання розплаву металу і установка для отримання розплавів металу