Слідкувальний привід поступального руху
Номер патенту: 71258
Опубліковано: 15.11.2004
Автори: Ковальов Віктор Дмитрович, Владимиров Анатолій Юрієвич, Мельник Максим Сергійович, Бабін Олег Фавієвич


Формула / Реферат
Слідкувальний привід поступального руху, що містить двигун обертального руху, передачу гвинт-гайка, з'єднану з двигуном обертального руху, виконавчий орган, датчик зворотного зв'язку, задавальний пристрій, порівнювальний пристрій і підсилювач, який відрізняється тим, що виконавчий орган з'єднано з якорем лінійного двигуна постійного струму, корпус якого з'єднано з гайкою передачі, причому лінійний двигун керується через підсилювач сигналом від порівнювального пристрою, а двигун обертального руху керується сигналом розлагодження через підсилювач від датчика розлагодження, що вимірює відхилення якоря лінійного двигуна постійного струму від середнього положення відносно гайки передачі.
Текст
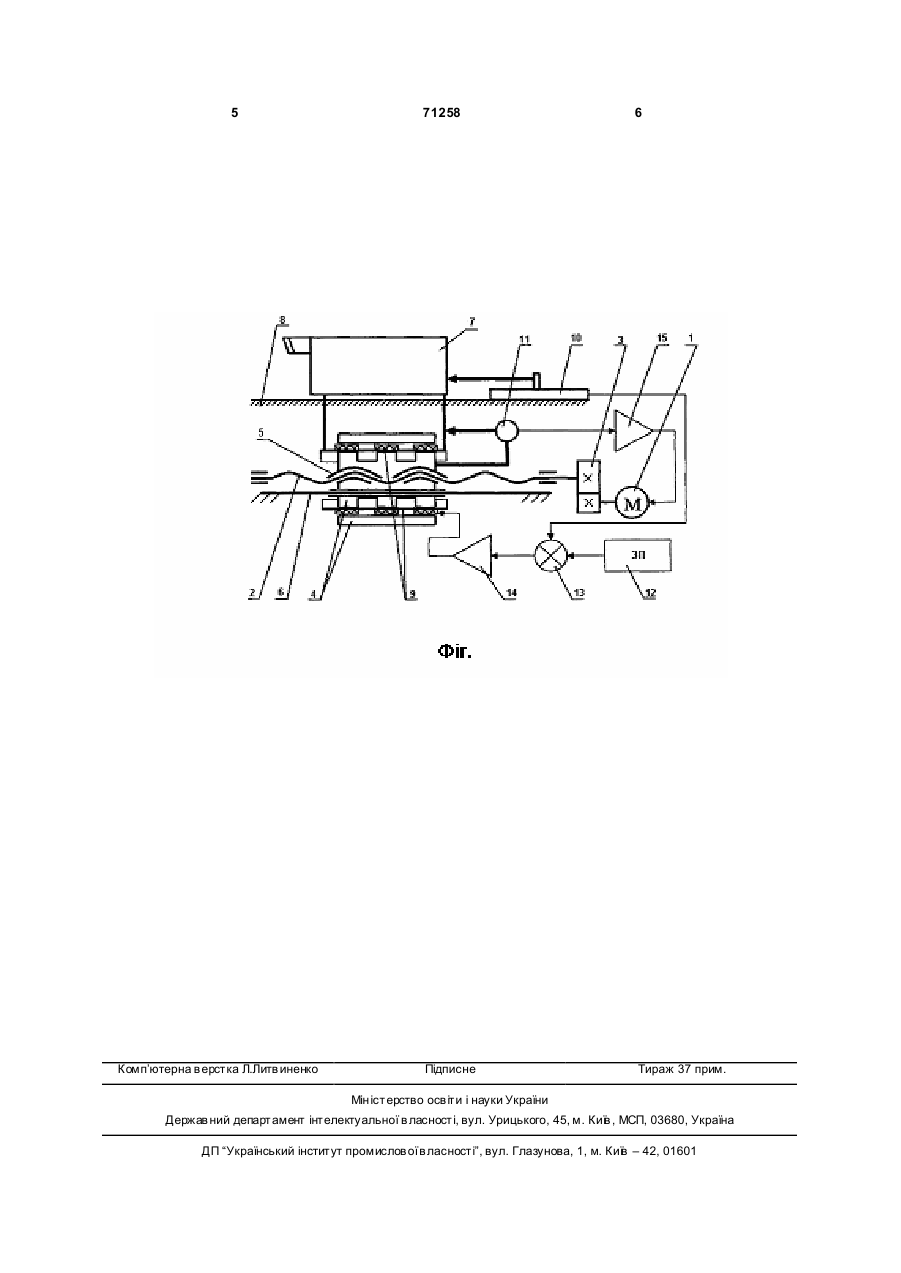
Слідкувальний привід поступального руху, що містить двигун обертального руху, передачу гвинтгайка, з'єднану з двигуном обертального руху, ви 3 71258 4 та приводу, що заявляється, є двигун постійного ного руху 1, з'єднаний з гвинтом 2 передачі гвинтструму обертального руху, передавальний мехагайка через редуктор 3, багатосекційний магнітонізм, виконавчий орган, датчик зворотного зв'язку, провід збудження лінійного двигуна 4, що з'єдназадавальний пристрій, порівнювальний пристрій, ний механічно з гайкою 5 передачі гвинт гайка, і підсилювач. зафіксований від провороту допоміжною направШвидкодія (максимальне прискорення) розляючою 6, виконавчий орган 7, розташований на глянутого приводу обмежується співвідношенням направляючих станини 8 і зв'язаний з якорем ліобертального моменту двигуна і приведеного монійного двигуна 9. Крім того, привід обладнано менту інерції рухомих частин приводу. При цьому двома датчиками зворотного зв'язку 10, 11. Датчик двигуни, що застосовуються у приводах подачі 10 вимірює положення виконавчого органу 7 відметалорізальних верстатів, при потрібній потужноносно станини 8, а датчик 11 вимірює зміщення сті дають підвищену швидкість і нижчий обертальвиконавчого органу 7 відносно магнітопроводу ний момент ніж потрібно для прямого приєднання лінійного двигуна 4. Система керування містить двигуна до виконавчого органу, що обумовлено задавальний пристрій 12, порівнювальний приконструкцією двигуна і магнітними властивостями стрій 13, підсилювач лінійного двигуна 14, підсиматеріалів його магнітопроводів і елементів збулювач розлагодження 15. дження. Це обумовлює необхідність застосування Привід працює таким чином: при подачі сигнаредукторів і призводить до значного підвищення лу від задавального пристрою 12 у порівнювальмаксимальної сумарної кінетичної енергії рухомих ному пристрої 13 відбувається порівняння поточчастин приводу при заданій потужності, внаслідок ного положення виконавчого органу 7, виміряного чого обмежується швидкодія приводу. датчиком 10, і заданого значення від пристрою 12. В основу винаходу покладено задачу підвиСигнал різниці через підсилювач 14 впливає на щення швидкодії слідкуючого приводу подачі на якірну обмотку лінійного двигуна постійного струму основі двигуна обертального руху до значення, що 9, змушуючи його рухати виконавчий орган 7 у забезпечується лінійними двигунами постійного напрямку заданого значення координати. Під час струму, при умові забезпечення потрібної довжини роботи лінійного двигуна датчик 11 фіксує зміщенробочого ходу, і виключенні залежності зусилля ня виконавчого органу 7 відносно магнітопровода від положення робочого органу. 4 і за допомогою підсилювача розлагодження 15 Поставлена задача вирішується тим, що виковмикає двигун обертального руху 1. Таким чином навчий орган з'єднується з якорем лінійного двигугайка передачі 5 з магнітопроводом 4 наздоганяє на постійного струму, корпус якого з'єднується з виконавчий орган 7. При досягненні виконавчим гайкою передачі гвинт-гайка, причому лінійний органом 7 заданого значення координати порівнюдвигун керується через підсилювач сигналом від вальний пристрій 13 видає нульовий сигнал, що порівнювального пристрою, а двигун обертального призводить до зупинки лінійного двигуна, у випадруху керується сигналом розлагодження через ку проходження виконавчим органом заданої копідсилювач від датчика розлагодження, що виміординати внаслідок інерції, пристрій 13 видає сигрює відхилення якоря лінійного двигуна постійного нал різниці протилежного знаку, що змушує двигун струму від середнього положення відносно гайки 4, 9 відпрацьовувати у зворотному напрямку. Попередачі. трібна швидкість переміщення забезпечується Запропоноване технічне рішення дозволяє відповідною швидкістю зміни значення сигналу від підвищити швидкодію приводу подачі, завдяки пристрою 12. тому, що перехідні процеси розгону та гальмуванТаким чином лінійний двигун, завдяки підвиня виконавчого органу відпрацьовуються лінійним щеній швидкодії, компенсує інерційність приводу з електродвигуном постійного струму, що має малий двигуном обертального руху під час перехідного хід, але велике тяглове зусилля і малу масу р ухопроцесу, а двигун обертального руху 1 з передамих частин, а під час сталого руху працює двигун чею гвинт-гайка забезпечує потрібну довжину рообертального руху, який за допомогою перетвобочого ходу і підтримує лінійний двигун у середрюючої передачі забезпечує потрібну довжину ньому положенні під час рівномірного руху і в стані ходу. зупинки. Структурна схема приводу показана на кресленні (див. фіг.). Привід містить: двигун оберталь 5 Комп’ютерна в ерстка Л.Литв иненко 71258 6 Підписне Тираж 37 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюServomechanism of forward motion
Автори англійськоюKovaliov Viktor Dmytrovych, Babin Oleh Faviyevych, Melnyk Maksym Serhiyovych
Назва патенту російськоюСледящий привод поступательного движения
Автори російськоюКовалев Виктор Дмитриевич, Бабин Олег Фавиевич, Мельник Максим Сергеевич
МПК / Мітки
МПК: B21B 38/00
Мітки: слідкувальний, привід, поступального, руху
Код посилання
<a href="https://ua.patents.su/3-71258-slidkuvalnijj-privid-postupalnogo-rukhu.html" target="_blank" rel="follow" title="База патентів України">Слідкувальний привід поступального руху</a>
Двигун зворотно-поступального руху
Номер патенту: 3168
Опубліковано: 15.10.2004
Автори: Цодік Ігор Абрамович, Поляков Олег Володимирович
МПК: H02K 33/00
Мітки: зворотно-поступального, двигун, руху
Формула / Реферат:
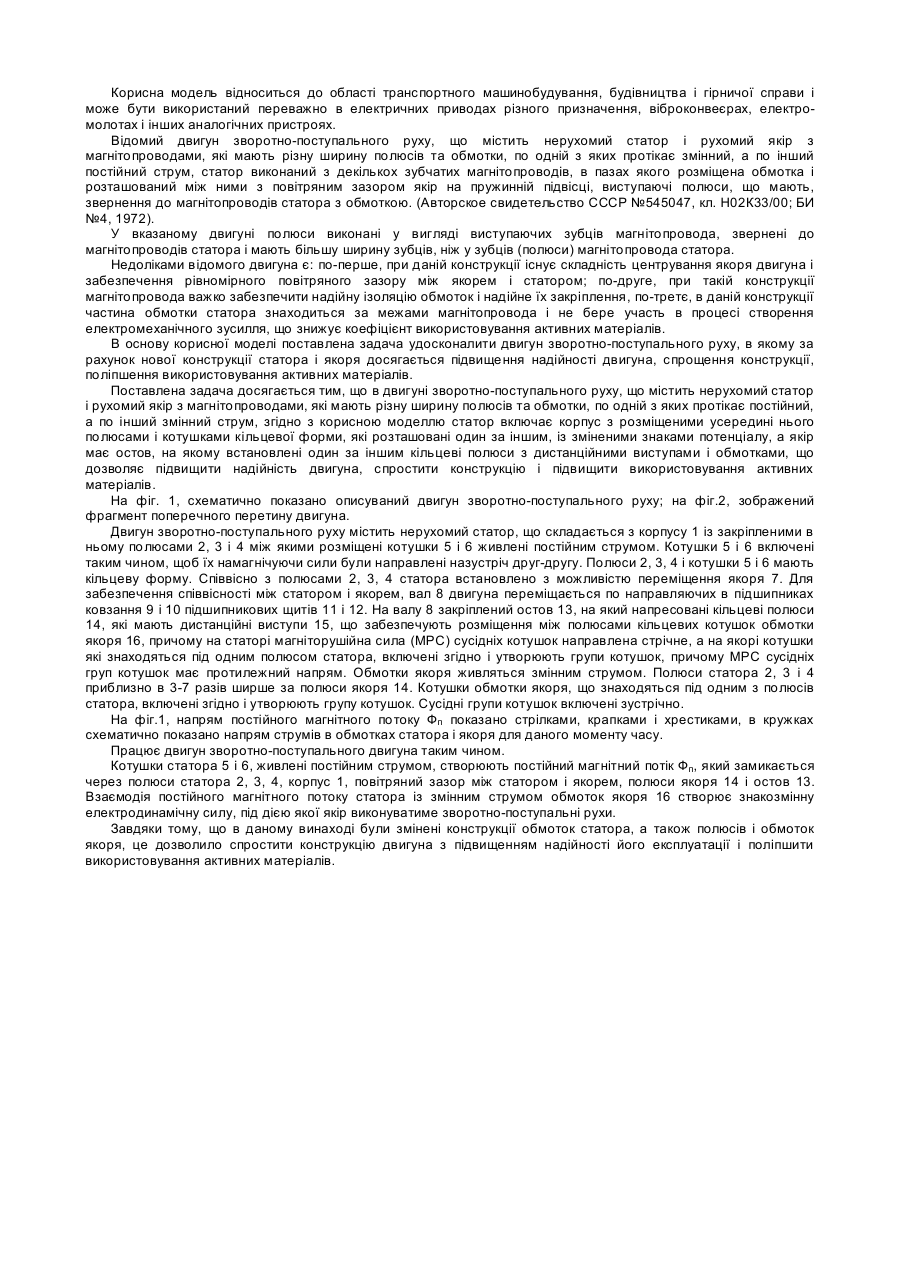
Двигун зворотно-поступального руху, що містить нерухомий статор і рухомий якір з магнітопроводами, які мають різну ширину полюсів та обмотки, по одній з яких протікає постійний, а по іншій - змінний струм, який відрізняється тим, що статор містить корпус з розміщеними усередині нього полюсами і котушками кільцевої форми, які розташовані один за одним, із зміненими знаками потенціалу, а якір має остов, на якому встановлені один за одним...
Пристрій для управління двигуном зворотно-поступального руху
Номер патенту: 34276
Опубліковано: 15.02.2001
Автори: Савчук Микола Миколайович, Шибицький Вячеслав Петрович, Шибицька Наталія Миколаївна
МПК: H02P 25/16
Мітки: пристрій, двигуном, зворотно-поступального, управління, руху
Текст:
...гашення електромагнітного поля двигуна 10 і рекуперацію не перетвореної енергії в конденсатор 14. В момент часу t6 струм обмотки збудження 13 стає рівним нулю, процес рекуперації закінчується, після чого за час t6...t7 конденсатор перезаряджається струмом, що змінюється по закону, який описує крива 24, по 2 34276 обмотку збудження 9 (13) двигуна зворотнопоступального руху, яке описується кривою 28 зміни напруги на конденсаторі,...
Електромагнітний перетворювач поступального руху магнітного елемента в обертальний рух вала
Номер патенту: 67019
Опубліковано: 15.06.2004
Автор: Сливка Юрій Іванович
МПК: H02K 7/06
Мітки: обертальний, перетворювач, електромагнітний, елемента, вала, руху, поступального, магнітного, рух
Формула / Реферат:
1. Електромагнітний перетворювач поступального руху в обертальний, що містить магнітні котушки, обмотані ізольованим провідником, у центральній частині яких є канал, де з можливістю поступального руху встановлені рухомі магнітні елементи, який відрізняється тим, що перетворювач виконаний у формі тора з рівномірно розташованими по окружності магнітними котушками, усередині яких рухомі магнітні елементи з'єднані послідовно міцним немагнітним...
Електромагнітний перетворювач поворотно-поступального руху в обертальний
Номер патенту: 55772
Опубліковано: 15.04.2003
Автор: Сливка Юрій Іванович
МПК: H02K 7/00
Мітки: руху, електромагнітний, поворотно-поступального, обертальний, перетворювач
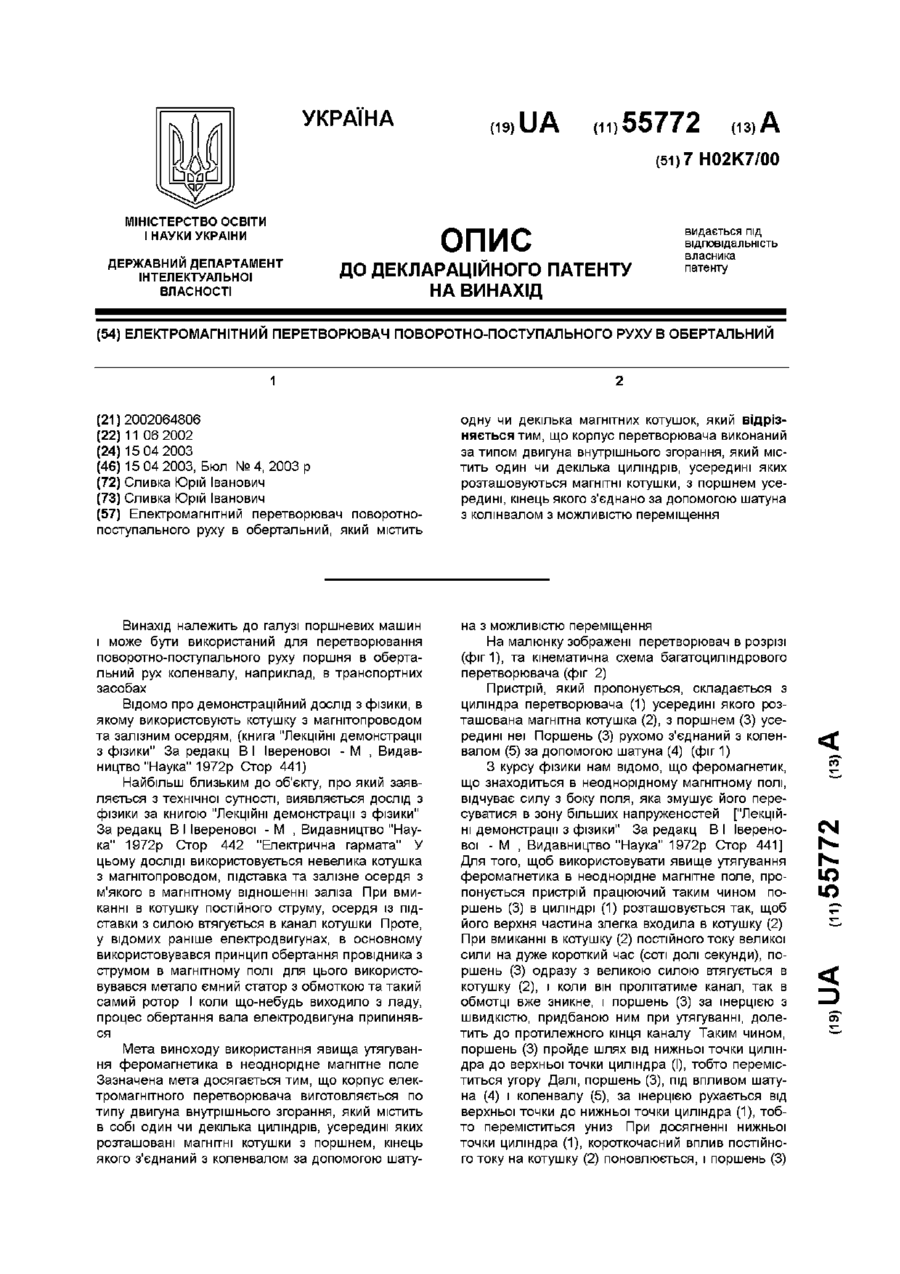
Формула / Реферат:
Електромагнітний перетворювач поворотно-поступального руху в обертальний, який містить одну чи декілька магнітних котушок, який відрізняється тим, що корпус перетворювача виконаний за типом двигуна внутрішнього згорання, який містить один чи декілька циліндрів, усередині яких розташовуються магнітні котушки, з поршнем усередині, кінець якого з'єднано за допомогою шатуна з колінвалом з можливістю переміщення.
Пристрій перетворення поступального руху в обертальний
Номер патенту: 5354
Опубліковано: 28.12.1994
Автор: Рахманов Микола Миколайович
МПК: F16H 1/16
Мітки: поступального, пристрій, руху, обертальний, перетворення
Формула / Реферат:
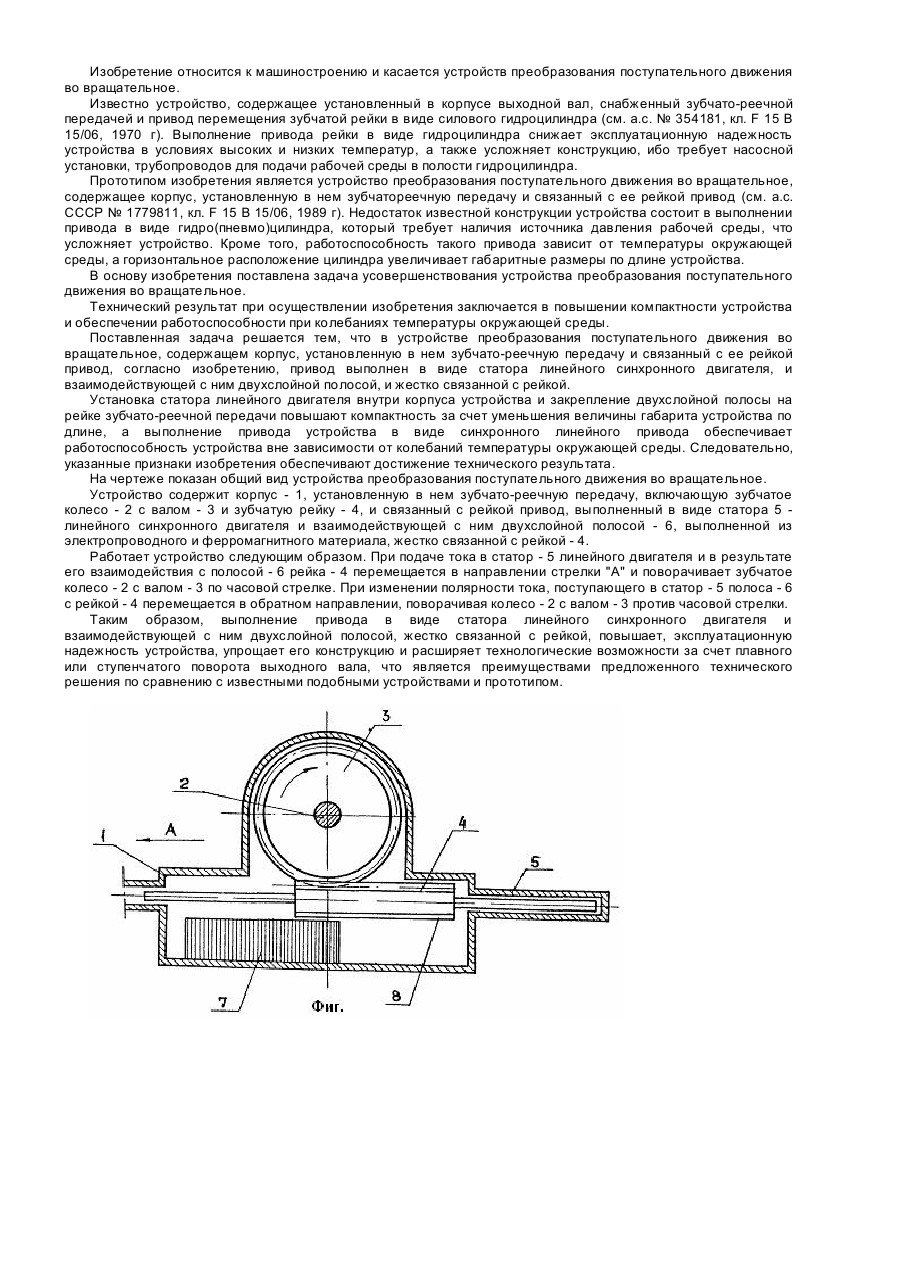
Устройство преобразования поступательного движения во вращательное, содержащее корпус, установленную в нем зубчато-реечную передачу и связанный с ее рейкой привод, отличающееся тем, что привод выполнен в виде статора линейного синхронного двигателя и взаимодействующей с ним двухслойной полосой, жестко связанной с рейкой.
Попередній патент: П’єзомагнітний тахометр
Наступний патент: Оптико-електронний вимірювач поверхневого натягу рідин
Випадковий патент: Пневмоциліндр двосторонньої дії