Багатопозиційний 3-d сенсор магнітного поля
Номер патенту: 74628
Опубліковано: 16.01.2006
Автори: Большакова Інеса Антонівна, Голяка Роман Любомирович
Формула / Реферат
Багатопозиційний 3-D сенсор магнітного поля, який містить декілька однакових вимірювальних перетворювачів, кожний з яких містить підкладку з сформованими на ній напівпровідниковою областю та контактами до неї, причому підкладки перетворювачів розміщені в різних площинах, який відрізняється тим, що містить шість перетворювачів, які утворюють шість сторін куба, причому напівпровідникові області кожного перетворювача розміщені по периметру кожної підкладки, а контакти - в центральній частині кожної підкладки.
Текст
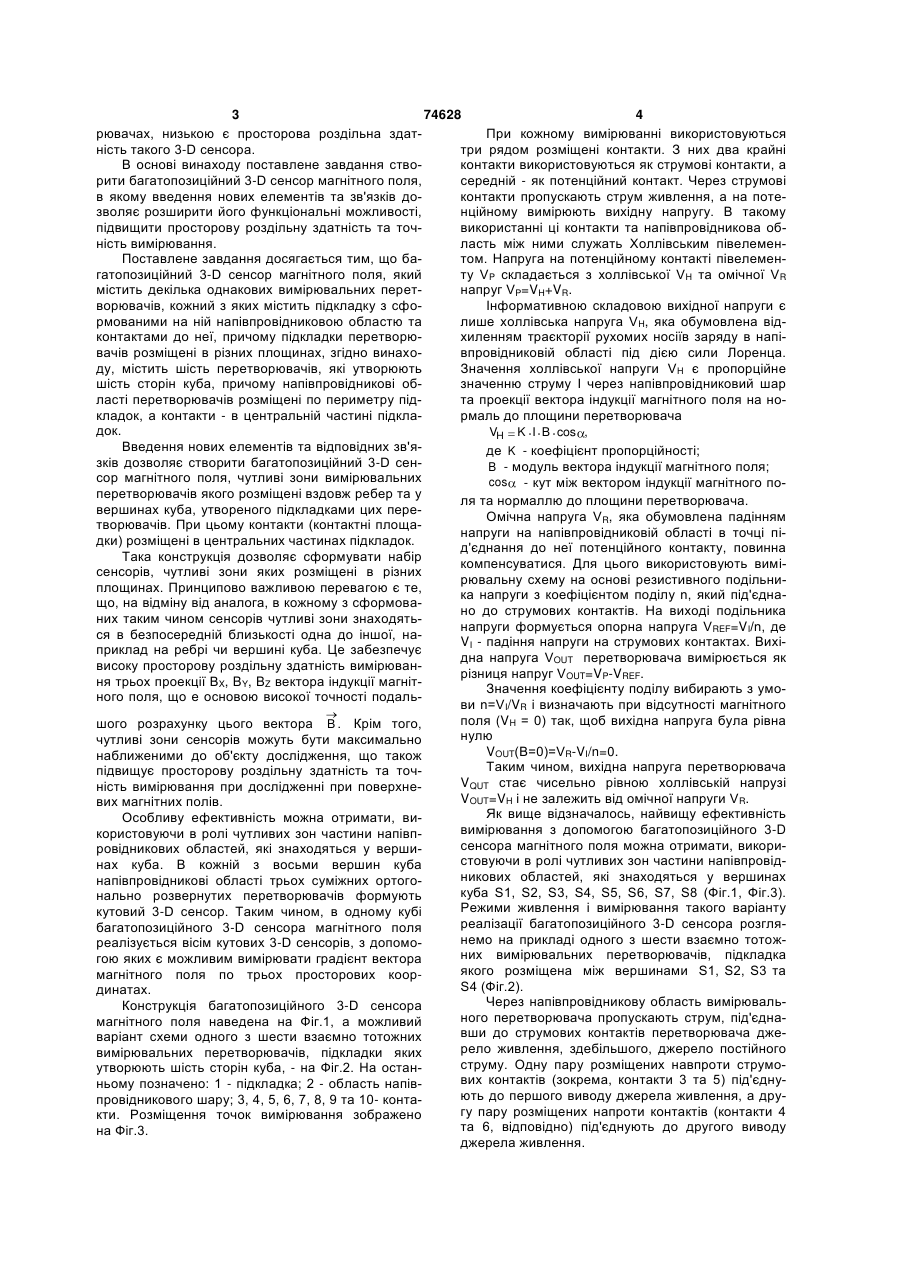
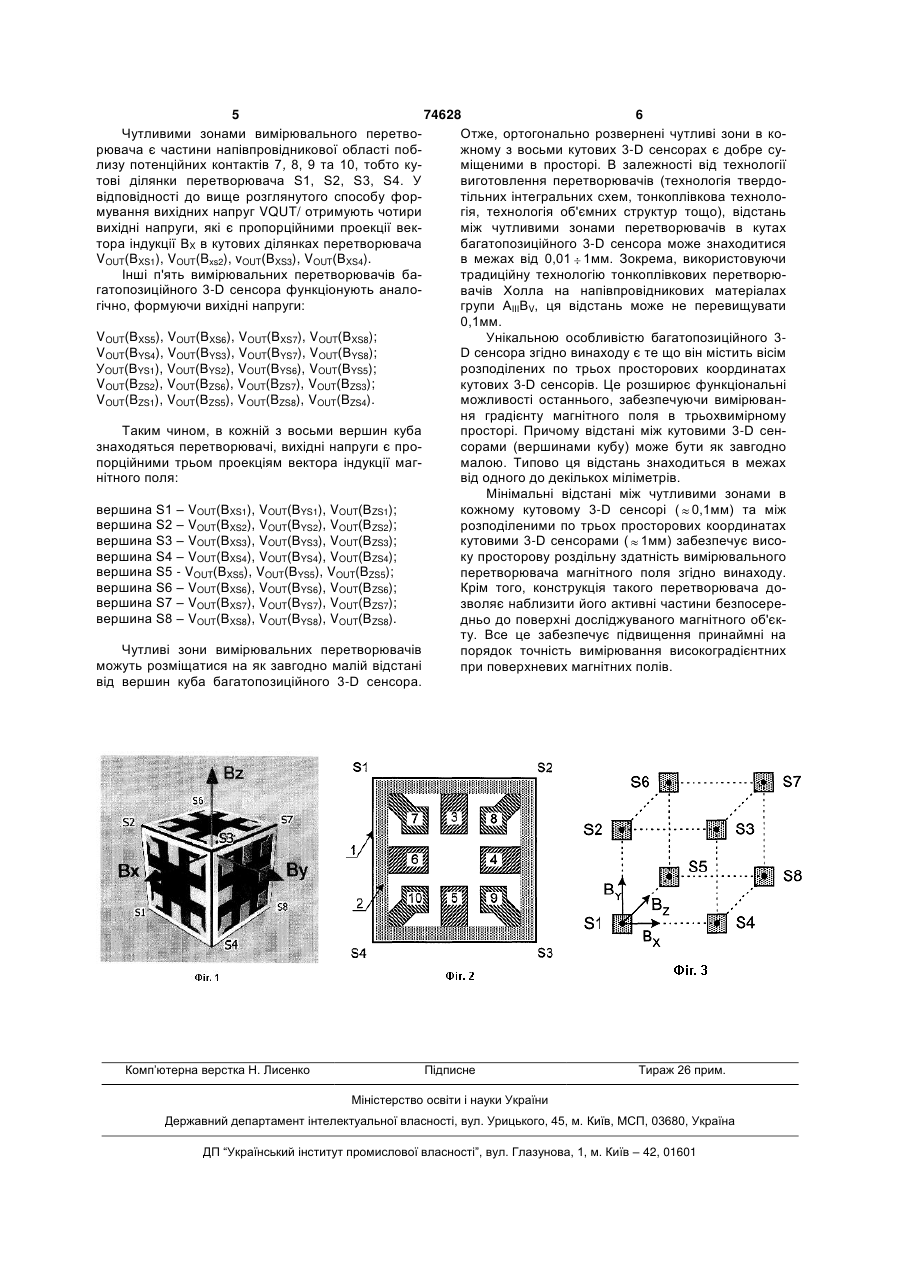
Багатопозиційний 3-D сенсор магнітного поля, який містить декілька однакових вимірювальних перетворювачів, кожний з яких містить підкладку з сформованими на ній напівпровідниковою областю та контактами до неї, причому підкладки перетворювачів розміщені в різних площинах, який відрізняється тим, що містить шість перетворювачів, які утворюють шість сторін куба, причому напівпровідникові області кожного перетворювача розміщені по периметру кожної підкладки, а контакти в центральній частині кожної підкладки. (19) (21) 2003098632 (22) 22.09.2003 (24) 16.01.2006 (46) 16.01.2006, Бюл. № 1, 2006 р. (72) Большакова Інеса Антонівна, Голяка Роман Любомирович (73) Большакова Інеса Антонівна, Голяка Роман Любомирович (56) Popovic R.S. Hall effect devices. Bristol, Philadelphia and New York. 1991. P. 61 Долгий С.А., Кукушкин А.А., Куликов Ю.В., Николаевский Г.Н., Паршутов В.Т., Яшута М.И. Гальваномагнитный трехкомпонентный датчик индукции магнитного поля // Приборы и техника эксперимента.-1979.-№5.-С.202 3 74628 4 рювачах, низькою є просторова роздільна здатПри кожному вимірюванні використовуються ність такого 3-D сенсора. три рядом розміщені контакти. З них два крайні В основі винаходу поставлене завдання ствоконтакти використовуються як струмові контакти, а рити багатопозиційний 3-D сенсор магнітного поля, середній - як потенційний контакт. Через струмові в якому введення нових елементів та зв'язків доконтакти пропускають струм живлення, а на потезволяє розширити його функціональні можливості, нційному вимірюють вихідну напругу. В такому підвищити просторову роздільну здатність та точвикористанні ці контакти та напівпровідникова обність вимірювання. ласть між ними служать Холлівським півелеменПоставлене завдання досягається тим, що батом. Напруга на потенційному контакті півелеменгатопозиційний 3-D сенсор магнітного поля, який ту VP складається з холлівської VH та омічної VR містить декілька однакових вимірювальних перетнапруг VP=VH+VR. ворювачів, кожний з яких містить підкладку з сфоІнформативною складовою вихідної напруги є рмованими на ній напівпровідниковою областю та лише холлівська напруга VH, яка обумовлена відконтактами до неї, причому підкладки перетворюхиленням траєкторії рухомих носіїв заряду в напівачів розміщені в різних площинах, згідно винаховпровідниковій області під дією сили Лоренца. ду, містить шість перетворювачів, які утворюють Значення холлівської напруги VH є пропорційне шість сторін куба, причому напівпровідникові обзначенню струму І через напівпровідниковий шар ласті перетворювачів розміщені по периметру підта проекції вектора індукції магнітного поля на нокладок, а контакти - в центральній частині підклармаль до площини перетворювача док. VH K I B cos , Введення нових елементів та відповідних зв'яде K - коефіцієнт пропорційності; зків дозволяє створити багатопозиційний 3-D сенB - модуль вектора індукції магнітного поля; сор магнітного поля, чутливі зони вимірювальних cos - кут між вектором індукції магнітного поперетворювачів якого розміщені вздовж ребер та у ля та нормаллю до площини перетворювача. вершинах куба, утвореного підкладками цих переОмічна напруга VR, яка обумовлена падінням творювачів. При цьому контакти (контактні площанапруги на напівпровідниковій області в точці підки) розміщені в центральних частинах підкладок. д'єднання до неї потенційного контакту, повинна Така конструкція дозволяє сформувати набір компенсуватися. Для цього використовують вимісенсорів, чутливі зони яких розміщені в різних рювальну схему на основі резистивного подільниплощинах. Принципово важливою перевагою є те, ка напруги з коефіцієнтом поділу n, який під'єднащо, на відміну від аналога, в кожному з сформовано до струмових контактів. На виході подільника них таким чином сенсорів чутливі зони знаходятьнапруги формується опорна напруга VREF=VI/n, де ся в безпосередній близькості одна до іншої, наVI - падіння напруги на струмових контактах. Вихіприклад на ребрі чи вершині куба. Це забезпечує дна напруга VOUT перетворювача вимірюється як високу просторову роздільну здатність вимірюванрізниця напруг VOUT=VP-VREF. ня трьох проекції ВX, BY, BZ вектора індукції магнітЗначення коефіцієнту поділу вибирають з умоного поля, що е основою високої точності подальви n=VI/VR і визначають при відсутності магнітного поля (VH = 0) так, щоб вихідна напруга була рівна шого розрахунку цього вектора B . Крім того, нулю чутливі зони сенсорів можуть бути максимально VOUT(В=0)=VR-VI/n=0. наближеними до об'єкту дослідження, що також Таким чином, вихідна напруга перетворювача підвищує просторову роздільну здатність та точVQUT стає чисельно рівною холлівській напрузі ність вимірювання при дослідженні при поверхнеVOUT=VH і не залежить від омічної напруги VR. вих магнітних полів. Як вище відзначалось, найвищу ефективність Особливу ефективність можна отримати, вивимірювання з допомогою багатопозиційного 3-D користовуючи в ролі чутливих зон частини напівпсенсора магнітного поля можна отримати, викорировідникових областей, які знаходяться у вершистовуючи в ролі чутливих зон частини напівпровіднах куба. В кожній з восьми вершин куба никових областей, які знаходяться у вершинах напівпровідникові області трьох суміжних ортогокуба S1, S2, S3, S4, S5, S6, S7, S8 (Фіг.1, Фіг.3). нально розвернутих перетворювачів формують Режими живлення і вимірювання такого варіанту кутовий 3-D сенсор. Таким чином, в одному кубі реалізації багатопозиційного 3-D сенсора розглябагатопозиційного 3-D сенсора магнітного поля немо на прикладі одного з шести взаємно тотожреалізується вісім кутових 3-D сенсорів, з допомоних вимірювальних перетворювачів, підкладка гою яких є можливим вимірювати градієнт вектора якого розміщена між вершинами S1, S2, S3 та магнітного поля по трьох просторових коорS4 (Фіг.2). динатах. Через напівпровідникову область вимірювальКонструкція багатопозиційного 3-D сенсора ного перетворювача пропускають струм, під'єднамагнітного поля наведена на Фіг.1, а можливий вши до струмових контактів перетворювача джеваріант схеми одного з шести взаємно тотожних рело живлення, здебільшого, джерело постійного вимірювальних перетворювачів, підкладки яких струму. Одну пару розміщених навпроти струмоутворюють шість сторін куба, - на Фіг.2. На останвих контактів (зокрема, контакти 3 та 5) під'єднуньому позначено: 1 - підкладка; 2 - область напівють до першого виводу джерела живлення, а друпровідникового шару; 3, 4, 5, 6, 7, 8, 9 та 10- контагу пару розміщених напроти контактів (контакти 4 кти. Розміщення точок вимірювання зображено та 6, відповідно) під'єднують до другого виводу на Фіг.3. джерела живлення. 5 74628 6 Чутливими зонами вимірювального перетвоОтже, ортогонально розвернені чутливі зони в корювача є частини напівпровідникової області побжному з восьми кутових 3-D сенсорах є добре сулизу потенційних контактів 7, 8, 9 та 10, тобто куміщеними в просторі. В залежності від технології тові ділянки перетворювача S1, S2, S3, S4. У виготовлення перетворювачів (технологія твердовідповідності до вище розглянутого способу фортільних інтегральних схем, тонкоплівкова техноломування вихідних напруг VQUT/ отримують чотири гія, технологія об'ємних структур тощо), відстань вихідні напруги, які є пропорційними проекції векміж чутливими зонами перетворювачів в кутах тора індукції ВX в кутових ділянках перетворювача багатопозиційного 3-D сенсора може знаходитися VOUT(ВXS1), VOUT(Bxs2), vOUT(ВXS3), VOUT(ВXS4). в межах від 0,01 1мм. Зокрема, використовуючи Інші п'ять вимірювальних перетворювачів батрадиційну технологію тонкоплівкових перетворюгатопозиційного 3-D сенсора функціонують аналовачів Холла на напівпровідникових матеріалах гічно, формуючи вихідні напруги: групи АIIIВV, ця відстань може не перевищувати 0,1мм. VOUT(ВXS5), VOUT(ВXS6), VOUT(ВXS7), VOUT(ВXS8); Унікальною особливістю багатопозиційного 3VOUT(ВYS4), VOUT(ВYS3), VOUT(ВYS7), VOUT(ВYS8); D сенсора згідно винаходу є те що він містить вісім УOUT(ВYS1), VOUT(ВYS2), VOUT(ВYS6), VOUT(ВYS5); розподілених по трьох просторових координатах VOUT(ВZS2), VOUT(ВZS6), VOUT(BZS7), VOUT(ВZS3); кутових 3-D сенсорів. Це розширює функціональні VOUT(BZS1), VOUT(ВZS5), VOUT(BZS8), VOUT(BZS4). можливості останнього, забезпечуючи вимірювання градієнту магнітного поля в трьохвимірному Таким чином, в кожній з восьми вершин куба просторі. Причому відстані між кутовими 3-D сензнаходяться перетворювачі, вихідні напруги є просорами (вершинами кубу) може бути як завгодно порційними трьом проекціям вектора індукції магмалою. Типово ця відстань знаходиться в межах нітного поля: від одного до декількох міліметрів. Мінімальні відстані між чутливими зонами в вершина S1 – VOUT(ВXS1), VOUT(ВYS1), VOUT(ВZS1); кожному кутовому 3-D сенсорі ( 0,1мм) та між вершина S2 – VOUT(ВXS2), VOUT(ВYS2), VOUT(ВZS2); розподіленими по трьох просторових координатах вершина S3 – VOUT(ВXS3), VOUT(ВYS3), VOUT(ВZS3); кутовими 3-D сенсорами ( 1мм) забезпечує висовершина S4 – VOUT(BXS4), VOUT(ВYS4), VOUT(BZS4); ку просторову роздільну здатність вимірювального вершина S5 - VOUT(ВXS5), VOUT(ВYS5), VOUT(BZS5); перетворювача магнітного поля згідно винаходу. вершина S6 – VOUT(ВXS6), VOUT(ВYS6), VOUT(ВZS6); Крім того, конструкція такого перетворювача довершина S7 – VOUT(ВXS7), VOUT(ВYS7), VOUT(BZS7); зволяє наблизити його активні частини безпосеревершина S8 – VOUT(ВXS8), VOUT(ВYS8), VOUT(ВZS8). дньо до поверхні досліджуваного магнітного об'єкту. Все це забезпечує підвищення принаймні на Чутливі зони вимірювальних перетворювачів порядок точність вимірювання високоградієнтних можуть розміщатися на як завгодно малій відстані при поверхневих магнітних полів. від вершин куба багатопозиційного 3-D сенсора. Комп’ютерна верстка Н. Лисенко Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMultiposition three-dimensional magnetic field strength transducer
Автори англійськоюBolshakova Inesa Antonivna, Holiaka Roman Liubomyrovych
Назва патенту російськоюМногопозиционный трехмерный датчик напряженности магнитного поля
Автори російськоюБольшакова Инесса Антоновна, Голяка Роман Любомирович
МПК / Мітки
МПК: G01R 33/06, H01L 43/00
Мітки: багатопозиційний, поля, сенсор, магнітного
Код посилання
<a href="https://ua.patents.su/3-74628-bagatopozicijjnijj-3-d-sensor-magnitnogo-polya.html" target="_blank" rel="follow" title="База патентів України">Багатопозиційний 3-d сенсор магнітного поля</a>
Вимірювальний перетворювач магнітного поля
Номер патенту: 72832
Опубліковано: 15.04.2005
Автори: Большакова Інеса Антонівна, Голяка Роман Любомирович
МПК: H01L 43/06, G01R 33/06
Мітки: перетворювач, магнітного, поля, вимірювальний
Формула / Реферат:
1. Вимірювальний перетворювач магнітного поля, який містить сформовані на підкладці напівпровідниковий шар та п'ять виводів до нього, перший з яких є центральним струмовим виводом, другий та третій виводи розміщені симетрично відносно першого виводу і є боковими струмовими виводами, четвертий та п'ятий виводи також розміщені симетрично відносно першого виводу і є потенційними виводами, причому четвертий вивід розміщений між першим та другим...
Вимірювальний перетворювач магнітного поля
Номер патенту: 72824
Опубліковано: 15.04.2005
Автори: Голяка Роман Любомирович, Большакова Інеса Антонівна
МПК: H01L 43/00, G01R 33/06
Мітки: перетворювач, вимірювальний, поля, магнітного
Формула / Реферат:
Вимірювальний перетворювач магнітного поля, що містить напівпровідникову робочу область квадратної форми, яка обмежена по периметру зовнішньою ізолюючою областю, а в кутах напівпровідникової робочої області сформовані чотири струмові контакти, між якими по сторонах сформовані чотири потенційні контакти, який відрізняється тим, що в центрі робочої області додатково сформована внутрішня ізолююча область.
Вимірювальний перетворювач магнітного поля
Номер патенту: 72831
Опубліковано: 15.04.2005
Автори: Голяка Роман Любомирович, Большакова Інеса Антонівна
МПК: G01R 33/06, H01L 43/06
Мітки: магнітного, поля, вимірювальний, перетворювач
Формула / Реферат:
Вимірювальний перетворювач, що містить сформований на підкладці напівпровідниковий шар, в якому сформована робоча область прямокутної форми, на поверхні якої розміщені три струмові контакти, перший з яких є центральним і розміщений посередині робочої області, а два інші є боковими і розміщені на краях робочої області, між струмовими контактами розміщені два потенційні контакти, а конструкція перетворювача в цілому є симетричною відносно...
Вимірювальний перетворювач магнітного поля
Номер патенту: 73816
Опубліковано: 15.09.2005
Автори: Голяка Роман Любомирович, Большакова Інеса Антонівна
МПК: G01R 33/06
Мітки: вимірювальний, перетворювач, магнітного, поля
Формула / Реферат:
Вимірювальний перетворювач магнітного поля, що містить напівпровідниковий шар та декілька виводів, сформованих по периметру напівпровідникового шару, який відрізняється тим, що напівпровідниковий шар виконаний на просторовому елементі, який складається з двох дзеркально симетричних плоских ділянок, причому площини цих ділянок та всіх виводів, приєднаних до них, утворюють двогранний кут.
Вимірювальний перетворювач магнітного поля
Номер патенту: 72825
Опубліковано: 15.04.2005
Автори: Голяка Роман Любомирович, Большакова Інеса Антонівна
МПК: H01L 43/00, G01R 33/06
Мітки: вимірювальний, поля, магнітного, перетворювач
Формула / Реферат:
Вимірювальний перетворювач магнітного поля, який містить сформований на підкладці перетворювач Холла з двома струмовими та двома потенційними виводами та петлю електромагнітної компенсації з двома виводами, який відрізняється тим, що додатково на тій же підкладці сформований другий перетворювач Холла, їх струмові виводи виконані спільними, а геометрична форма його потенційних виводів є дзеркально симетричною до геометричної форми петлі...
Попередній патент: Коробка для сигарет і листова заготовка для її виготовлення
Наступний патент: Похідні n-фенпропілциклопентилзаміщеного глутараміду як інгібітори неп для лікування рсзж
Випадковий патент: Спосіб одержання подвійного ортофосфату цезію-нікелю (іі)